Патенты с меткой «робота»
Привод промышленного робота

Номер патента: 1151448
Опубликовано: 23.04.1985
Авторы: Гейдаров, Керимов, Фархадов
МПК: B25J 9/00
Метки: привод, промышленного, робота
...на О дежности работы привода.Цель достигается тем, что привод промышленного робота, содержащий силовой цилиндр, тормозное устройство и регулируемые упоры с винтовым 15 механизмом, снабжен подпружиненным стержнем и дополнительной винтовой парой, винт которой закреплен на корпусе тормозного устройства, а на гайке этой винтовой нары размещен 2 О один иэ датчиков, нри этом другой датчик размещен на корпусе силового цилиндра, а стержень установлен в этом корпусе с воэможностью его взаимодействия одним концом со што ком тормозного устройства, а другим концом - с датчиками.На чертеже схематически изображено предлагаемое устройство.Привод промьвнлецного робота со- Зр держит силовой цилиндр 1, тормозное устройство 2, шток 3 которого совмещен...
Захватное устройство промышленного робота

Номер патента: 1110059
Опубликовано: 15.05.1985
Авторы: Голованов, Листов, Смирнов, Топорин
МПК: B25J 15/00
Метки: захватное, промышленного, робота
...2 расположены губки, выполненныев виде изогнутых по окружностиигл 3. 11 оследние закреплены на двуплечих угловых рычагах 4, которыесвободно поворачиваются на оси 5 икрепятся к корпусу 1 с помощью кронштейнов 6. Иглы 3 выполнены с возможностью перекрытия при вращении их впараллельных плоскостях для предотвращения сползания заготовки 7 с игл 3.Движение ка двуплечие рычаги 4 передаетея посредством двух тросов 8,натянутых по контуру корпуса 1, отдвухходового пневмоцилиндра 9. Концы обоих тросов 8 крепятся на двухрычагах 10, которые жестко связаны соштоками 11 пневмоцилиндра 9. Для регулировки натяжения тросов 8 служатполые регулировочные винты 12.Для правильной ориентации и натяжения тросов 8 предназначены направляющие б фоки 13, которые...
Кисть промышленного робота

Номер патента: 1168090
Опубликовано: 15.07.1985
Авторы: Рио, Сейитиро, Синсуке, Хадзиму
МПК: B25J 15/00
Метки: кисть, промышленного, робота
...Верхние концевыеучастки поддерживающих кронштейнов.21 и 22 присоединены с возможностьюскольжения и вращения к обоим концам независимого звена - шатуна 23с помощью штифтов 24 и 25, Центральная часть шатуна 23 поддерживаетсяна неподвижном кронштейне 20 с помощью штифта 26 так, что шатун 23может поворачиваться. Шток 27 газового цилиндра 28 связан с концевой частью кронштейна 29, присоеди-.ненного к нижнему концу одного изподдерживающих кронштейнов 21 или22. В результате этого при движении взад и вперед поршня 30 цилинд-ра 28 захватывающие пальцы 13 перемещаются параллельно друг другувдоль направляющих валов 3 1 и 32 спомощью упомянутого шатунного элемента, так что эти пальцы противостоят друг другу и осуществляютоперацию открывания и...
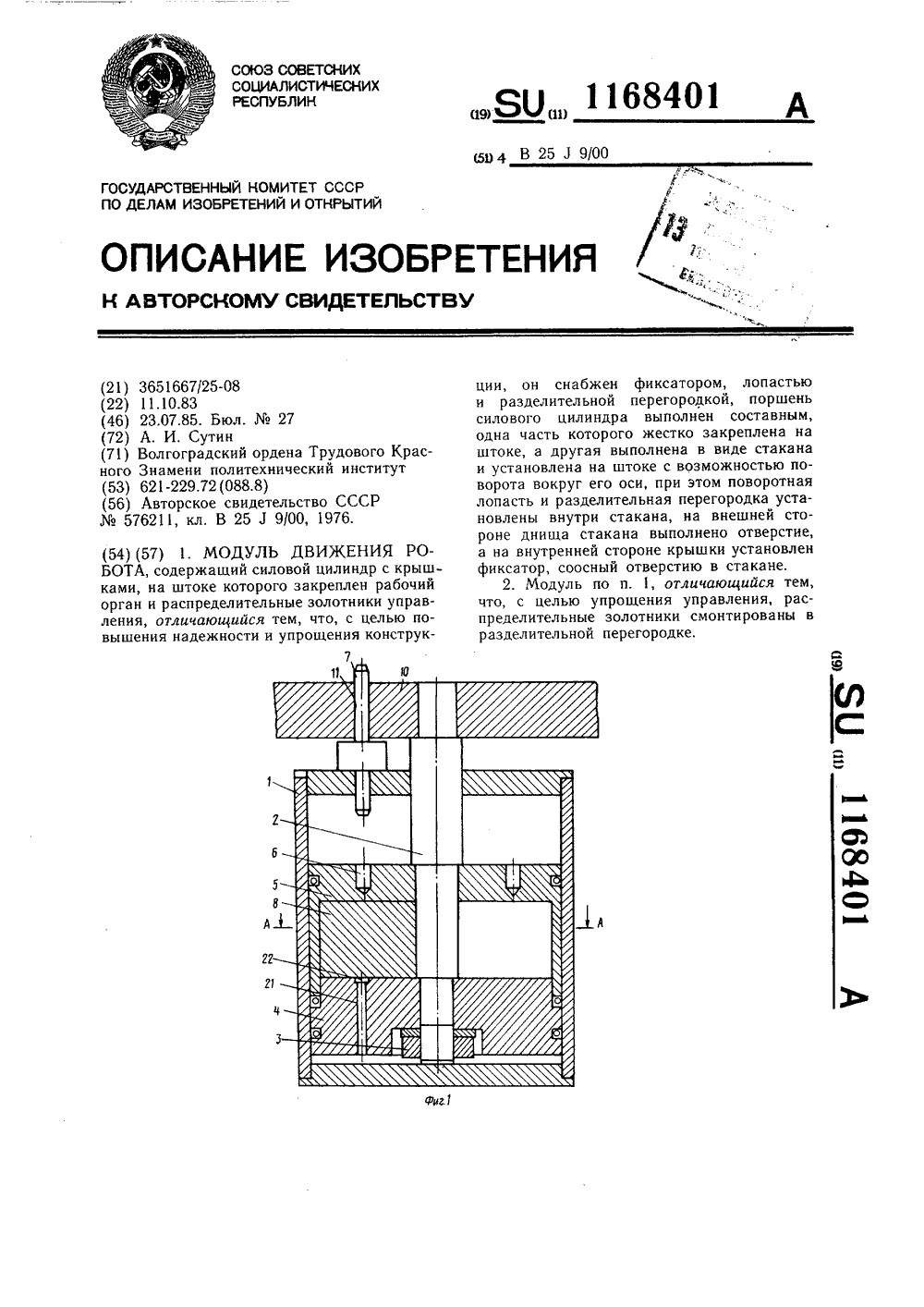
Модуль движения робота
Номер патента: 1168401
Опубликовано: 23.07.1985
Автор: Сутин
МПК: B25J 9/00
Метки: движения, модуль, робота
...клапан 20 служат для отвода рабочего тела из полости 16. Канал 21 в теле поршня 4 и полукольцевая канавка 22 на торце поршня 4 обеспечивают сообщение нижней полости цилиндра 1 с полостью 16 стакана, как при повороте лопасти 9, так и при повороте разделителя 8. Канал 23 служит для подвода рабочего тела из верхней полости цилиндра 1 в полость 17 стакана 5. Канал 24 и обратный клапан 25 служат для отвода рабочего тела из полости 17,Модуль движения робота работает следующим образом.Исходным является положение, когда поршень 4 и рабочий орган 10 находятся в нижнем положении. При этом фиксатор 7 находится в отверстии 11 рабочего органа 10 и удерживает последний от проворота. При подаче рабочего тела в нижнюю полость цилиндра 1...
Рука промышленного робота

Номер патента: 1174255
Опубликовано: 23.08.1985
Авторы: Аксенов, Камсков, Худяков, Чапинский
МПК: B25J 9/00
Метки: промышленного, робота, рука
...гидроцилиндром схвата 12 и с гидромотором 6.Гидравлическая схема приводов ориентирующих движений кисти выполнена по принципу дистанционной передачи силового потока, 40Приводы качания и вращения кисти содержат однотипные блоки управления движением качания и движением вращения.Блоки 2 и 3 управления, представляюц 1 ие собой электрогидравлические шаговые приводы,содержат задающий шаговый двигатель 13, связанный через винтовую передачу 14 с распределителем 15, задающий гидромотор 16, связанный с распределителем 15 механической обратной связью по углу поворота. Однако, например правая, рабочая полость задающего гидромотора 16 подключена посредством магистрали 17 к одномувыходному каналу распределителя 15, дру.гая, левая, полость задающего...
Схват робота

Номер патента: 1175692
Опубликовано: 30.08.1985
Авторы: Абраров, Алферов, Андреев, Лисин, Рассохин, Сигов
МПК: B25J 15/00
Метки: робота, схват
...4, отделенный от основания изоляцией 5 и подпружинен к нему пружиной 6. Электрод 4 заземлен и через резистор 7 соединен с металлическим основанием 1. В подложке и пленке выполнен паз для прохода электрода. Высоковольтный полюс источника 8 напряжения через коммутатор 9 соединен с основанием 1, а второй полюс источника 8 заземлен, В диэлектрическом корпусе 10 размещены камеры 11 с кассетами 12 для восстановления использованной пленки 3 и программное устройство 13, соединенное с коммутатором 9 и камерами 11, Позицией 14 обозначена захваты в а ем ая деталь.Схват работает следующим образом.Для захвата детали 14 поверхность схвата, покрытую полимерной пленкой.3, приводят в контакт с деталью. При этом электрод 4 находится в постоянном...
Схват промышленного робота

Номер патента: 1177150
Опубликовано: 07.09.1985
Авторы: Вечернин, Галковский, Гольдберг, Дорохин, Немолочнов
МПК: B25J 15/00
Метки: промышленного, робота, схват
...копира 3 и захватное устройство опускается до соприкосновения с деталью 23 и захватывает ее.Корпус 1 схвата останавливается, а затем начинает движение в обратном направлении, При этом копир 3 посредством возвратной пружины воздействует на палец 9 и поднимает захватное устройство 8 с деталью 23 до тех пор, пока палец 9 не вернется на горизонтальную плоскость копира3, Затем пальцы 17 и 18 переходят нанаклонные плоскости копиров 4 и 5, рычаги1 1 и 1 2 поворачиваются и обеспечивают сведение губок 13 и 14 до соприкосновения сдеталью. Рычаг1 с неподвижно закрепленной губкой 13 доходит до упора 21 и удерживается в этом положении благодаря10 пружине 20.Под действием пружины 19 создаетсяусилие прижима губок 13 и 14 к детали,вследствие...
Рука промышленного робота

Номер патента: 1177154
Опубликовано: 07.09.1985
Автор: Шенкер
МПК: B25J 18/04
Метки: промышленного, робота, рука
...5 и пробкой 7, и регулирующая силу давления на толкатель, Корпус 2 схвата снабжен рычагами, несущими зажимные губки. Цанговый схват содержит зажимные губки - лепестки 8, а на толкателе 5 установлен распорный конус 9, челюстной схват содержит зажимные губки - челюсти 10, а толкатель установлен в направляющих 4,Общий привод поворота корпуса 2 схвата и перемещения зажимных губок выполнен в виде шарнирно-рычажного механизма, содержащего толкатель 5 и тягу 11, один конец которой через окно, выполненное в корпусе 2 схвата, шарнирно соединен с толкателем 5, а второй конец тяги 11 шарнирно связан со штоком 12 силового цилиндрра 13. Корпус силового цилиндра 13 жестко связан с основанием 1.Рука промышленного робота работаетследующим...
Очувствленный схват промышленного робота

Номер патента: 1180263
Опубликовано: 23.09.1985
Авторы: Березовик, Дубовский, Зинченко, Солодкин
МПК: B25J 15/00
Метки: очувствленный, промышленного, робота, схват
...потока (фиг. 2) содержит сумматор 25, вычитающие устройства 26 - 28 и задающее51 О15 20 25 30 35 40 45 50 55 выполнены со светопоглощающими стенками, т.е. не являются волноводами, с целью получения на их выходе световых лучей с четкой границей. Каналы 21 представляют собой волноводы. Зеркало 22 выполнено в форме квадрата (фиг. 4).Схват работает следующим образом.Перед включением в работу составляют модель захватываемого объекта 24 на основании его характерных точек. Эти данные заносят в устройство 30. Каналы 21 располагаются таким образом, что они открытыми концами находятся над характерными точками объекта 24.В исходном состоянии перед взятием объекта 24 внутренняя часть 3 губки поддействием пружины 10 сдвинута относительно...
Система дистанционной передачи визуальной информации телеуправляемого робота

Номер патента: 1182689
Опубликовано: 30.09.1985
Авторы: Барац, Белоцерковский, Жуков, Захаров, Киклевич, Котенко
МПК: H04N 7/00
Метки: визуальной, дистанционной, информации, передачи, робота, телеуправляемого
...объективов связан с помощью следящей системы с этим датчиком.Окуляры воспроизводящего устройства и объективы устройства слежения связаны с соответствующими узлами системы телевизионной передачи изображения посредством волоконно-оптических регулярно уложенных жгутов и оптических согласующих устройств,На фиг.1 представлена принципиальная схема системы дистанционной передачи визуальной информации; на фиг.2 и 3 изображены фрагменты картин при стереоскопическом и моноскопическом восприятии трехмерного протранства оператором.Система содержит бинокулярное оптическое устройство слежения за объектом по азимуту и углу места, состоящее из двух объективов 1, закрепленных на вертикальных осях механизма 2, включающего две шестерни, находящиеся...
Схват промышленного робота

Номер патента: 1184665
Опубликовано: 15.10.1985
Авторы: Майский, Ступин, Феофанов
МПК: B25J 15/06
Метки: промышленного, робота, схват
...магнитных осеймагнитов участками магнитопровода.На Лиг. 1 изображен схват промьппленного робота общий видф на фиг,235сечение А-А на Лиг. 1; на Аиг. 3соединение пластин с участками магнитопровода.Схват промьппленного робота содержит цилиндр 1 внутри которого нахо 40дится поршень 2, корпус 3, закрепленный на цилиндре 1, Внутри корпуса3 помещена возвратная пружина 4,одетая на шток 5, который жестко,скреплен с поршнем 2, Шток 5посредством шарнира 6 соединен срамкой 7, выполненной из немагнитного материала. Внутри рамки 7 закреплен дополнительный магнит 8, Междуучастками 9 и 1 О магнитопровода,соединенными между собой через прокладку 11, выполненную из немагнитного материала, находится основноймагнит 12. Наружный кожух 13...
Исполнительное устройство промышленного робота

Номер патента: 1184666
Опубликовано: 15.10.1985
Авторы: Болотин, Корендясев, Саламандра, Сонин, Тывес
МПК: B25J 1/02, B25J 17/00
Метки: исполнительное, промышленного, робота
...модулей 2, последовательносоединенных между собой и образующихупругое хоботообраэное звено. Каждый модуль выполнен в виде двух сфе- З 0рических сегментов 3, закрепленныхна Фланцгх 4 и контактирующих междусобой по сферическим поверхностям.На Фланцах 4 выполнены отверстия 5,через которые пропущены гибкие тяги35о и 7, например тросы, жестко закрепленные на последнем от основания1 модуле 2,и связанные через выходные валы 8 и 9 с соответствующимиприводами 10 и 11.Механизм центрирования выполненв виде двух стержней 12 и 3 соединенных между собой сферическим шарниром 14,В сферических сегментах 3 выполнены направляющие, направление которых совпадает с осью симметрии последних, в которых установлены стержни 2 и 13, связанные через...
Захватное устройство робота

Номер патента: 1187984
Опубликовано: 30.10.1985
Авторы: Михайлов, Тамбулатов
МПК: B25J 15/02
Метки: захватное, робота
...наб., д. 4/5Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4 1 1187Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано для оснащения промьппленных роботов, применяемых для захвата мягкой тары типа закрытых мешков при подаче их к месту наполнения любыми сыпучими материалами, например минеральными удобрениямиЦель изобретения - расширение технологических возможностей схвата робота.На фиг. 1 изображено захватное устройство в момент переноса мешка; на фиг. 2 - то же, в момент раскры тия клапана.Захватное устройство содержит корпус, состоящий из частей 1 и 2, соединенных шарниром 3 и оборудованных присосками 4, из которых одна закрепО лена на части корпуса 1, а остальные - на части 2. Между...
Привод поворота исполнительного органа промышленного робота

Номер патента: 1189551
Опубликовано: 07.11.1985
Автор: Натбиладзе
МПК: B21D 43/00, B25J 9/00
Метки: исполнительного, органа, поворота, привод, промышленного, робота
...А-А нафиг. 2,Механическая рука 1 закрепленана валу 2, имеющем шестерню 3, находящуюся в зацеплении с рейкой 4.Последняя своими концами связанас поршнями 5 силовых цилиндров 6,которые соосно размещены в дополнительных цилиндрах 7 с возможностьювозвратно-поступательного регулировочного перемещения, В дополнительных цилиндрах 7 установлены поршни 8со штоком 9, своими концами размещенными в полостях силовых цилиндров 6с возможностью взаимодействия с поршнями 5, В крышке 10 дополнительных цилиндров 7 установлены регулировочные упоры, выполненные в видевинтов 11, ввернутых с возможностьювзаимодействия с поршнями 8. Дополнительный цилиндр 7 фиксируется относительно силового цилиндра 6 гайкой 12,Силовые и дополнительные цилиндры 5 и 7...
Захват промышленного робота

Номер патента: 1191283
Опубликовано: 15.11.1985
Авторы: Бодров, Калинин, Трофимов
МПК: B25J 15/02
Метки: захват, промышленного, робота
...10 25приводного механизма 2. Крайние перегибы 11 и 12 служат в качестве губок захвата, концы ленты 4 закрепле-,ны к направляющим 3. Пневматические камеры 13 и 14 с эластичными 301 стенками закреплены с внешней стороны каждого из двух крайних перегибов 11 и 12. Камеры 13 и 14 возможно закрепить к перегибам 11 и 12с помощью склеивания. 35Захват промышленного робота работает. следующим образом.Захватываемая деталь располагается между внутренними поверхностямиленты 4. В пневматические камеры 13 40и 14 подается давление, сжатого воздуха, под действием которого эластичные стенки перемещаются и, дейст 283 2вуя на крайние перегибы 11 и 12,смыкают губки. Перемещение приводного механизма 2 поступательного действия вдоль оси захвата вызывает...
Захват промышленного робота

Номер патента: 1192971
Опубликовано: 23.11.1985
Авторы: Ивашов, Кузнецова, Некрасов, Степанчиков
МПК: B25J 15/02
Метки: захват, промышленного, робота
...элементы 3, составляющие упругую систему. Свободные концы элементов 3 герметизированы заглушками 4 и к ним прикреплены эластичные губки 5,В эахвате 1,фиг.2) упругая система выполнена в виде сильфонов 6, закрепленных на корпусе 1. Свободные концы сильфонов герметизированы за 0 Энергоносителем во всех. трех типах схватов может быть, например,сжатый воздух.Захват промышленного робота рабо.тает следующим образом.При подаче энергоносителя в .корпус-коллектор 1 и далее в упругиеэлементы последние деформируются и 2 р обхватывают деталь произвольной формы (не показано) губками .5.При работе захвата, показанногона фиг.З, при перемещении коллектора 9 от привода вверх вдоль оси за Б хвата гибкие элементы 8 начинаютсходиться к центру и...
Очувствленный схват промышленного робота

Номер патента: 1194674
Опубликовано: 30.11.1985
МПК: B25J 15/00
Метки: очувствленный, промышленного, робота, схват
...А"А на Фиг. 1на фиг. 3 - вид Б на фиг. 2, с условно снятой оболочкой на фиг. 4 -электрическая схема соединения тактильных датчиков.Очувствленный схват содержит установленные на корпусе 1 с возможностью перемещения губки 2, на поверхности которых расположены тактильныедатчики, чувствительный элемент 3которых выполнен из материала, изменяющего свое электрическое сопротивление под действием нагрузки,Губки 2 покрыты оболочкой 4 с выступами 5 на ее поверхности, выполненной из эластичного материала. Подоболочкой расположены шины 6 с выступами 7, выполненные из электропроводного материала, и шины 8, выполненные из полупроводникового материала и установленные перпендикулярно шинам б,Чувствительные элементы 3 расположены ,од выступами 5 оболочки...
Очувствленный схват робота

Номер патента: 1196264
Опубликовано: 07.12.1985
Авторы: Запорожец, Кондратенко, Панченко, Ткаченко, Филаретов
МПК: B25J 15/08
Метки: очувствленный, робота, схват
...электропроводящей резины, закрепленной между пальцами 2 схвата.Концы пластин 5 подключены к блоку 6 измерения, выход которого соединен с входом переключающего элемента 7 и одним из входов компаратора 8, другой вход которого подключен к выходу блока 9 памяти, вход блока 9 памяти соединен с выходом переключающего элемента 7, а управляющий вход этого элемента подключен к выходу устройства 3 управления, один из входов которого соединен с выходом компаратора 8.Очувствленный схват работает следующим образом. По сигналу устройства 3 управления происходит захват детали с определенным наперед заданным усилием. Если высота захватываемой детали не превышает высотупальцев 2, то в случае проскальзывания детали между этими пальцами вследствие...
Схват промышленного робота

Номер патента: 1199616
Опубликовано: 23.12.1985
Автор: Перегуд
МПК: B25J 15/06
Метки: промышленного, робота, схват
...В-В на фиг, 2;Схват робота содержит корпус 1 с раз,ещенными в нем цилиндром 2, осью 3, на которой расположен блок из шестерен 4 и 5, направляющими 6 с установленными в них захватными органами, каждый из которых вьп.олнен в виде пластины 8, держателя 9 с электромагнитом 10 и упором 11, выполненным в виде полукольца, внутренний диаметр которого соответствует наружному диаметру заготовки 12, и на котором закреплен датчик наличия детали, представляющий собой микропереключатель 13. Электромагниты установлены с возможностью взаимодействия с торцовыми поверхностями заготовки, а упоры 11 и микропереключатели 13 - : ее боковой поверхностью, Упоры 11 гарантируют возможность точного перехвата заготовки захватными органами. Каждый из...
Исполнительное устройство промышленного робота

Номер патента: 1202852
Опубликовано: 07.01.1986
Авторы: Болотин, Корендясев, Саламандра, Сонин, Тывес
МПК: B25J 1/02
Метки: исполнительное, промышленного, робота
...расположенного на фланце 4, сердечник 29 которого ки 20 25 30 35 40 45 50 55 нематически связан посредством, апример, шарнирно-ползунного меха- изма 30 с поворотным элементом 31, меющим круговые пазы, Тормозные колодки 32 - 35 жестко закреплены на фланце 4 и входят в круговой паз поворотного элемента 31. Тормозные колодки 36-39 установлены подпружиненно посредством соответствующих упругих элементов, например пружин 40-.43, относительно круговых пазов поворотного элемента 31.Исполнительное устройство промьпп,ленного робота работает следующим На механизмы фиксации дополнительных гибких тяг, установленные на фланце Г, подается сигнал от системы управления (не показана) и на этом фланце фиксируются дополнительные гибкие тяги 20 и 2 1. В...
Исполнительное устройство промышленного робота

Номер патента: 1202853
Опубликовано: 07.01.1986
Авторы: Болотин, Корендясев, Саламандра, Сонин, Тывес
МПК: B25J 1/02
Метки: исполнительное, промышленного, робота
...робота, общий вид, на фиг. 2 -место соединения фланцев смежных модулей, на фиг. 3 - сечение А-А на фиг. 1.Исполнительное устройство промыш ленного робота выполнено в виде основания 1, установленных на нем идентичных модулей 2. Каждый модуль 2 выполнен в виде фланцев 3 и 4, имеющих в центральной части соответственно цилиндрические поверхности 5 и 6. Сферические сегменты 7 и 8 контактируют между собой по сферическим поверхностям и установлены на цилиндрических поверхностях соответственно 5 и 6 фланцев 3 и 4 с возможностью вращения вокруг продольной оси устройства, При этом фланцы 3 и 4 соединены между собой упругим элементом 9, обладающим высокой крутильной жесткостью, например, сильфоном. На францах 3 и 4 . выполнены отверстия 10-13,...
Захват промышленного робота

Номер патента: 1202876
Опубликовано: 07.01.1986
Авторы: Елтышева, Завацкий, Кондра, Ландо, Орлов
МПК: B25J 15/00
Метки: захват, промышленного, робота
...с помощью набора изоляционхпластин 15 совместно с пружиой 16, расположенной над пружиной12 с некоторым зазором.На расположенных друг над другом свободных концах пружин 16 и 1.2 имеются контактные пятачки, обращенные друг к другу,, Второй конец пружины 13 крепится к корпусу без изоляционных прокладок.Корпус цилиндра 1 и корпус захвата соединены переходной втулкой 17. Поршень 2 установлен в верхнем - исходном положении, при помощи пружины 18 возврата.В исходном положении нижний торец упора 11 располагается несколько выше торцов нижних захватных плеч рычагов 5. Захват работает следующим образом. При опускании руки промышленного робота или манипулятора происходит ввод захватных плеч качающихся рычагов 5 в изделие, при этом...
Адаптивный схват промышленного робота

Номер патента: 1202878
Опубликовано: 07.01.1986
Автор: Донец
МПК: B25J 15/04
Метки: адаптивный, промышленного, робота, схват
...и 11.На корпусе 1 установлено средство12 внешней информации, выполненноев виде общей оси 13, расположеннойперпендикулярно губкам 8 и 11 и снабженной двумя крайними рычагами 14 и15, охватывающими губки. На оси 13закреплен кулачок 16, взаимодействующий с конечным выключателем 17.Кроме того, на оси 13 между губками8 и 11 свооодно установлен основнойрычаг 18 с возможностью вращенияотносительно оси 13, Рычаг 18 связан с кулачком 19, взаимодействующимс конечным выключателем 20. Рычаги14, 15 и 18 фиксируются в исходномположении упорами 21, установленнымина,кронштейнах 22 корпуса 1, на которых расположен датчик 12 внешнейинформации,Адаптивный схват крепится наруке промышленного робота (ие показан).Адаптивный схват промышпенногоробота работает...
Устройство для ориентации захвата промышленного робота

Номер патента: 1207759
Опубликовано: 30.01.1986
Авторы: Жаботинский, Можухин, Силин
МПК: B25J 18/00
Метки: захвата, ориентации, промышленного, робота
...закрываемый крышкой 7, крепящийся к рабочей поверхности 5 с помощью 20нинтов 8. В расточках стержня 3эавальцованы подпружиненные пружинами9 шарики 10. На стержне 3 между торцом корпуса 1 и направляющим пояском4 расположена пружина 11, На стержнеЭ между направляющим пояском 4 и рабочей поверхностью 5 выполнены дневинтовые канавки 12 с малым угломподъема резьбы. В нижней части корпуса 1 расположены ролики 13, которые 3 Овместе с нинтовыми канавками 12образуют нинтовую пару. В стержне 3ныполнено отверстие, предназначенноедля соединения обмотки электромагнита6 с системой 14 управления роботом,35Устройство для ориентации захвата спомощью хомута 15 крепится на руке16 промьппленного робота,Устройство для ориентации захвата промышленного...
Устройство для определения кратчайшего пути автономного транспортного робота

Номер патента: 1215116
Опубликовано: 28.02.1986
Авторы: Брагин, Косминская, Костюк, Пишванов
МПК: G06F 15/173
Метки: автономного, кратчайшего, пути, робота, транспортного
...тактовые им пульсы, обеспечивающие счет счетчиков 2, за исключением принадлежащих заблокированным столбцам,Так продолЖается до переполнениялюбого счетчика 2 последнего столбца матрицы моделей 1 дуг, при этомна выходе элемента ИЛИ 5 появляетсялогическая "1", сбрасывающая в "О"триггеры Ю -го столбца матрицы моделей 1 дуг, а на втором входе элемента И 4 1 появляется "О", запрещающий поступление импульсов с генератора 7 к счетчикам 2. При этом на,выходах ряда счетчиков 2 будет присутствовать сигналпереполнения,зафиксированный в .процессе работы устройства.Код кратчайшего пути считыванияформируется при появлении единичного сигнала на выходе элемента ИЛИ 5с выходов элементов И 9, при этомна выходе элемента И 9; присутствует логическая...
Рука робота

Номер патента: 1215994
Опубликовано: 07.03.1986
Авторы: Коваль, Мещеряков, Тимофеев, Хрусталев
МПК: B25J 18/02, B25J 9/02, B25J 9/12 ...
Метки: робота, рука
...крайнее выдвинутое положение; на фиг. 3 - сечение А - А на фиг. 1; на фиг. 4 - сечение Б - Б на фиг. 1; на фиг. 5 - сечение ф. - В на фиг. 2; на фиг. 6 - разрез Г - Г на фиг. 2.Рука робота содержит три телескопически установленных звена 1 - 3 и привод линейного перемещения звеньев 2 и 3.Первое звено 1 (внешнее) жестко связано с основанием 4, а на конце третьего (внутреннего) звена 3 закреплен рабочий орган 5 (схват).Привод линейного перемещения выполнен в виде индуктора 6, установленного на свободном конце третьего звена, 3, при этом второе звено 2 выполнено из электропровод- ного материала.Тяги 7 и 8 огибают ролики 9 и 10 соответственно, установленные на разных концах второго звена 2. Концы тяг 7 и 8 закреплены на индукторе 6 и на...
Модуль линейного перемещения промышленного робота

Номер патента: 1215995
Опубликовано: 07.03.1986
Авторы: Натбиладзе, Сабиашвили, Тибилашвили
Метки: линейного, модуль, перемещения, промышленного, робота
...штоком 2. Направляющий элемент 3 выполнен в виде линейки для задания положения упоров 4 и 5, установленных на направляющем элементе с возможностью перемещения вдоль него и фиксации их положения. Тормозные золотники 6 и 7 установлены,на передней крышке 8 пневмоцилиндра 1, На каждом штоке 6 и 7 закреплены ходовые винты 9 и 10, взаимодействующие с гайками 11 и 12, расположенными в осевых отверстиях двух пар храповых колес 13 и 14. Колеса в каждой паре жестко связаны между собой и расположены таким образом, что зубья имеют противоположное направление. На торцовой поверхности храпового колеса каждой пары со стороны упора закреплены опорные элементы 15 и 16. Для передачи вращения храповым колесам предназначены толкатели 17 и 18,...
Схват промышленного робота

Номер патента: 1215996
Опубликовано: 07.03.1986
Автор: Шендерей
МПК: B25J 15/00, B25J 9/12
Метки: промышленного, робота, схват
...сечения. Полость 18 расположена между устройствами для фиксации штоков и уплотнения.50Для наполнения внутренних полостейкорпуса губок ферромагнитной суспензиейслужит пресс-масленка 21. При этом контроль заполнения полостей осуществляется чей среды, а электромагниты - к источ. нику регулируемого напряжения (тока) .Схват работает следующим образом.Для захвата изделий со сложной конфигурацией губки 4 схвата вращением приводного вала разводятся на необходимое расстояние, определяемое габаритами изделия и величиной максимального выдвижения штоков.При последовательной подаче рабочей среды под давлением через отверстия 20 в зону штоков штоки 13 последовательно сдвигаются к центру схвата, аппроксимируя контактными поверхностями...
Привод перемещения исполнительного органа робота

Номер патента: 1219335
Опубликовано: 23.03.1986
МПК: B25J 9/00
Метки: исполнительного, органа, перемещения, привод, робота
...Ужгород, ул. Проектная, 4 1Изобретение отосится к машиностроению, в частност к робототехнике, и ложет быть использовано в приводе перемещения руки манипулятора.Цель изобретешя - снижение энергетичес. ких затрат на перемещение.На чертеже показана схема привода,.Привод содержит руку 1 манипулятора, двигатель 2, упругие элементы 3 и 4, шарнирно установленные на руке, а также регу лпруемые упоры 5. Привод снабжен фиксато. рами положения руки в точках позициони. ровашгя и средстваъп возврата упругих элементов в исходное положение не пока. залы).Привод работает следующим образом.При включении двигателя 2 рука 1 манипулятора.перемещается, прц этом один нз регулируемых упоров 5 находится в выдвц. путом положешщ. Прц контакте выдвину. того упора...
Схват промышленного робота

Номер патента: 1219337
Опубликовано: 23.03.1986
Авторы: Ефремов, Кудрявцев, Медведев
МПК: B25J 15/00, B25J 15/02
Метки: промышленного, робота, схват
...к робототехнике, Известны схваты промышленных роботов, содержащие корпус, губки, шарнирно прикрепленные к корпусу, и приводы перемещения губок,Цель изобретения -- повышение точности установки детали в таре.На фиг.1 представлена конструкция схвата, общий вид; на фиг.2 -- схема предварительного ориентирования детали в схватс перед укладкой в тару.Схват промышленного робота содержит корпус 1, к которому шарнирно прикреплены пальцы 2 и 3. Шатуны 4 и 5 шарнирно связаны одним концом с пальцами 2 и 3, а другим - со штоком 6.Губка 7 расположена в продольных наравляащих 8, выполненных на пальце 2, и кинематически связана с приводом 9 ее иодьема. Губка-толкатель 10 шарнирно прикреплена к пальцу 3, она иоджимается пружиной 11 и приводится в...