Система идентификации параметров многомерного нелинейного динамического объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
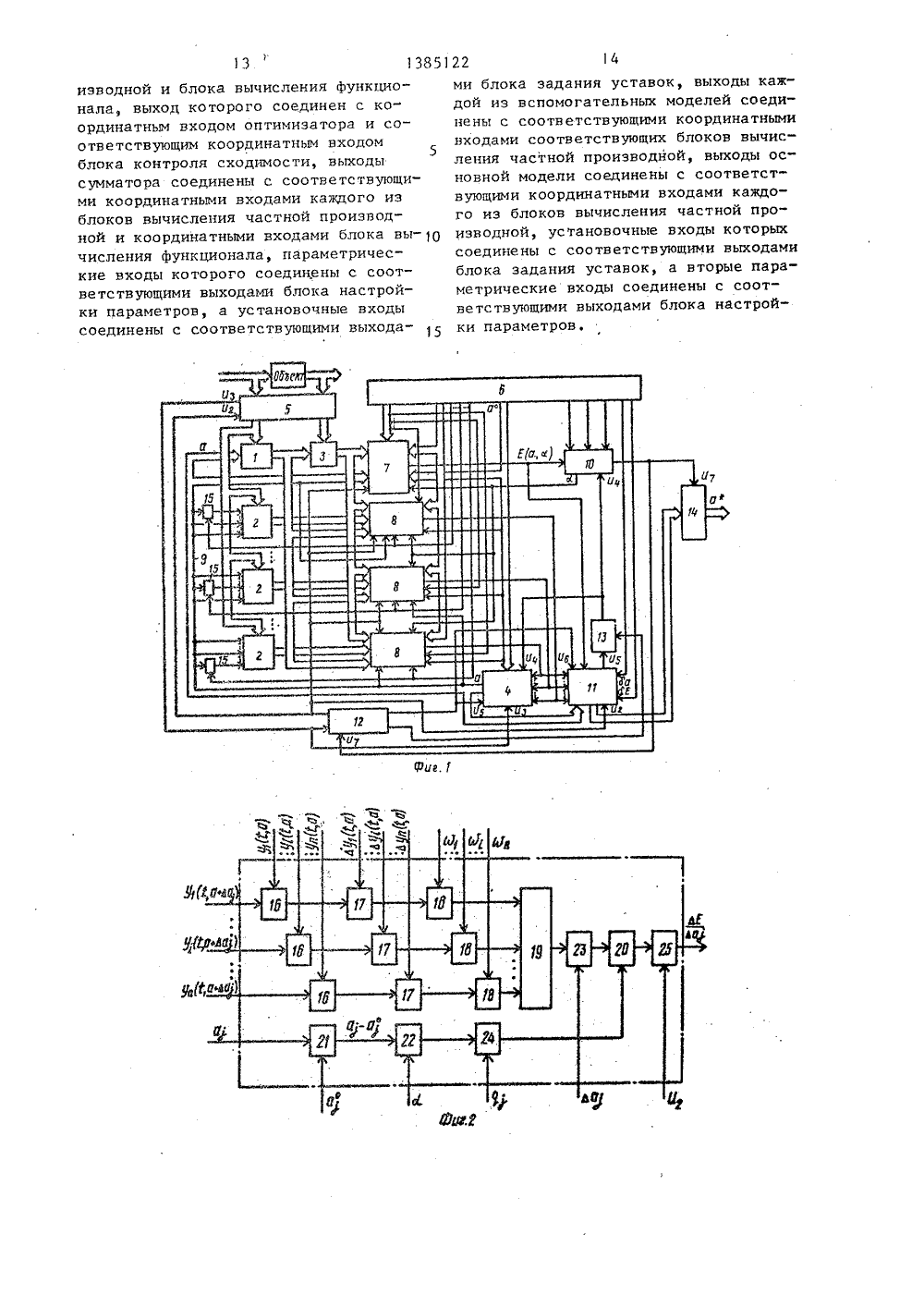
)С в,СССР1981.фикации/Техе мае с 1ем ме об ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ПИСАНИЕ ИЗОБР ВТОРСКОМУ СВИДЕТЕЛЬСТВ(54) СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕРОВ МНОГОМЕРНОГО НЕЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЬЕКТА(57) Изобретение относится к автическим системам обработки резтатов натурных испытаний динамичких объектов. Цель изобретениярасширение функциональных возмотей и области применения системьЭто достигается тем, что в сист идентификации введены блок памяти, блок задания уставок, блок вычисления функционала,. блоки вычисления частных производных, количество которых равно числу идентифицируемых параметров, оптимизатор, блок.контроля сходимости, блок команд, элемент ИЛИ и управляемый ключ. Кроме того, между каждым выходом блока настройки параметров и параметрическим входом, номер которого совпадает с номером данной вспомогательной модели, каждой из вспомогательных моделей введены сумматоры отклонений, а также установлены соответствующие связи между этими блоками. Предлагаемая система позволяет осуществлять идентификацию параметров многомерныхлинейных объектов по записанным на отрезке наблюдения в блок памяти изрениям входных и выходных сигналов ъекта. 8 ил.38522Составитель А.Лашев Редактор Л.Пчолинская Техред А.Кравчук Корректор В.Бутяга Заказ 42/45 Тираж 866 Подписное ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4 И Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4Изобретение относится к автоматическим системам обработки результатовнатурных испытаний динамических объектов и может быть использовано дляидентификации параметров многомерныхнелинейных динамических объектов порезультатам испытаний,Цель изобретения - расширениеФункциональных возможностей и облас Оти применения системы,На фиг. представлена Функциональная схема системы идентификациипараметров многомерного нелинейногодинамического объекта; на Фиг.2 - 15функциональная схема блока вычисления частной производной; на фиг.3Функциональная схема блока вычисления Функционала; на фиг.4 - функциональная схема блока контроля сходимости; на, Фиг.5 - функциональная схема блока команд; на фиг,6 - временная диаграмма работы системы идентиФикации; на фиг.7 - Функциональнаясхема возможного исполнения блока 25настройки параметров; на фиг.8Функциональная схема возможного исполнения блока выделения модуля.Система идентификации содержитосновную 1 и вспомогательные 2 модели, сумматор 3, блок 4 настройки параметров, блок 5 памяти, блок 6 задания уставок, блок 7 вычисления функционала, блоки 8 вычисления частныхпроизводных, число которых равно числу идентифицируемых параметров 9,оптимизатор 10, блок 11 контроля сходимости, блок 12 команд, элементИЛИ 13, блок 14 ключей и сумматоры15 отклонения, На схеме использованы 40следующие обозначения: х , у (Е)входной и выходной сигналы объекта;у(,а),у(т;,а+да ) - выходной сигнальосновной и 3-и вспомогательной модели; зу(й,а) - разность выходных 15сигналов основной модели и объекта;а, а - текущее и начальное значениявектора параметров объекта;Ыщ Ы - соответственно минимальное,максимальное и текущее значения пара" 5метра регуляризации; Е(а,Ы) - значение Функционала качества; и; - весовой коэффициент 3-го параметра;весовой коэффициент 1-й компонентывектора состояния объекта; да - вектор отклонений параметров объекта;, бЕ, /а - требуемые точности оптимизацин соответственно по параметру регуляризации, функционалу качества и идентифицируемым параметрам;3 Е/а - приближенное значение производной Функционала по 3-му параметру; 1, 1= 1,7 - управляющиесигналы," а - искомый вектор идентиФицированных параметров.Блок 8 вычисления частной производной системы идентификации содержит координатные сумматоры 16, координатные блоки 17 умножения и координатные настраиваемые усилители 18,количество каждых из которых равночислу выходов объекта, выходной сумматор 19, первый 20 и второй 21 сумматоры, блок 22 умножения, первый23 и второй 24 настраиваемые усилители и инетгратор 25,Блок 7 вычисления функционала образуют координатные квадраторы 26и координатные настраиваемые усилители 27, количество каждых из которых равно числу выходов объекта, атакже параметрические сумматоры 28,параметрические квадраторы 29 и параметрические настраиваемые усилители 30, количество которых равно числу идентифицируемых параметров, атакже первый выходной .сумматор 31,число входов которого равно числуидентифицируемых параметров, блок 32умножения, второй выходной сумматор33, число входов которого на единицубольше числа выходов объекта,и интегратор 34, выход которого являетсявыходом блока вычисления функционала.Блок 11 контроля сходимости содержит управляемый ключ 35 параметров, блок 36 запоминания параметров,настраиваемые усилители 37, блоки 38вьщеления модулей параметров, сумматоры 39 параметров, блоки 40 выделения модулей разностей, компараторы41 параметров, блоки 42 умножения,блоки 43 выделения модулей произведений и компараторы 44 градиента, количество которых равно числу идентифицируемых параметров, а также первый настраиваемый усилитель 45, блок46 выделения модуля функционала, элемент 47 задержки и элемент И 48,число входов которого на единицубольше удвоенного числа идентифицируемых параметров, а выход которогоявляется выходом блока контроля сходимости.Блок 12 команд имеет два одновибратора 49 и 50, три элемента 51 - 53задержки, схему ИЛИ 54 и схему И 55,1385122 Предлагаемая система иденти(1)икации реализует способ идентификациипараметров объекта с помощью настраиваемой модели, основанный на использовании информации о первых частныхпроизводных Функционала качества понастраиваемым параметрам. В качествефункционала качества в предлагаемой 10 системе используется равномерно выпуклый функционал вида: Е(у ,у,а)=(у(а)-у(а,а и(у(а)-у(а,аИааф(а-а)у ц(а-а)аао1:1 где уЭ=(уЭ уЭ уЭ(Т- вектор состояния объекта (измеряемый 25 экспериментальный выходной сигнал объекта);у(е,а) =(у (г.,а),у (у а),, у (Е,ат- вектор состояния модели;и - число выходов объекта иденти 1фикации (размерность вектора состояния объекта и модели);а=(аа 2 а ) - вектор параметров объекта;ш - число идентифицируемых пара 35 метров (размерность вектора параметров); О ОО 1 а 1 О- матрица весовых коэффициентов компо 40О О ч нент векторасостояния объек та; Ч О О - матрица весоЧ= О Ч 2 О . вых коэффициаентов компоО О Ч, нент векторапараметров объектаа; 50( .О о о)уприближение вектора йараметров объекта.Объект идентификации описывается системой обыкновенных нелинейных дифференциальных уравнений вида: у = К(у, х, а) Блок 4 настройки параметров состоит из последовательно соединенных первого 56 и второго 57 управляемых ключей, блока 58 настраиваемых усилителей, третьего управляемого ключа 59 и выходного блока 60 памяти,Блок выделения модуля содержит первое 61 и второе 62 пороговые уст" ройства, первый 63 и второй 64 управляемые ключи, инвертор 65 и сумматор 66. Где Х (Х 1 уХ 2 ууХ векто 1)входных координат объекта(.(,Г.у.Е, ) - векторФункция, непрерывно дпфференцируемая по всем своим аргументам на отрезке наблюденияГОу Т 3 экспериментальных процессов,В этом случае задача идентификации параметров объекта Формулируетсяследующим образом.Элемента аЕ Ч (где Ч - множество допустимых значений вектора параметров) такой, что шп Е (у,у,а)=Е (у,у,а )аЧи у(г:,а ) удовлетворяет уравнению(2) при х(С)=хэ где х "(С) - экспериментальный входной сигнал объекта у(о)=у (о). При этом а+ рассматривается как искомый вектор параметров, Необходимо добиться также, чтобы значение Е(у У,у,а+) было минимумом функционала качества не толькопо параметрам а, но и по параметру регуляризацииВ качестве алгоритма настройкипараметров модели может быть использован любой градиентный метод минимизации функции многих переменных, Используемый в системе оптимизатор 10реализует алгоритм одномерной оптими1385 5зации функционала (1) по параметру регуляризации Ы, Это может быть любой алгоритм одномерной оптимизации, но в данном случае с целью сокращения затрат времени на процесс иден 5 тификации целесообразно испольэовать алгоритмы, требующие для достижения заданной точности оптимизации минимальное число вычислений оптимизируе мой Функции (например, метод фибоначчи). Система идентификации работает следующим образом.15Перед включением системы в работу осуществляется запись экспериментальных входных хи выходных у(1) сигналов на отрезке наблюдения (О,Т 1 в блок 5 памяти, в блоке 6 задания уставок выставляются весовые коэффициенты и,(х=1 п),1 (1=1,ш), началь-: ные приближения параметров а Ц=1,ш), малые приращения параметров да (1 =1,ш) для приближенного вычисления частных производных функционала качества по параметрам, требуемая точность вычисления экстремума Функционала по параметрам 1 а и по градиенту 1 Е, максимальное мас и мини мальное 1 д допустимые значения параметра регуляриэации Ы и требуемая точность определения экстремума функционала. по параметру регуляризацииА(,.Управление работой всей схемы осу 35 ществляется управляющими сигналами, поступающими от блока 12 команд. Временная диаграмма формирования управ-, ляющих сигналов в схеме представлена на Фиг.б.При включении системы в работу на третьем выходе блока 12 команд формируется кратковременный управляющий импульс 11, который поступает на вход.45 элемента ИЛИ 13, на выходе которого появляется управляющий сигнал 11, по-. ступающий на стартовые входы оптимизатора 10 и блока 4 настройки параметров. По этому сигналу оптимизатор запускается что приводит к появлению на его параметрическом выходе первого начального значения парамет" ра регуляризации , поступающего на соответствующие входы блока вычисленияФункционала и блоков 8 вычисления частных производных. По сигналу 11 в блоке 4 настройки параметров осуществляется запоминание начального 122 6значения вектора параметров ао т- (а, а, ,а ) и выдача этого значения вектора параметров на выход блока. Это значение поступает на соответствующие параметрические входы всех моделей 1 и 2, в результате че" го во всех моделях устанавливаются начальные значения параметров а .Ц=о 1 =1,ш). Причем в каждой 1-й вспомогательной модели 2 значение параметра а устанавливается с малым приращекием Л а;, поступающим на соответствующий сумматор 15 отклонений. После выставки заданных значений параметров во всек моделях системы на первом выходе блока 12 команд появляется кратковременный управляющий сигнал 11, поступающий на стартовые входы блока 7 вычисления функционала, всех блоков 8 вычисления частных производных, блока 11 контроля сходимости и блока 5 памяти. По сигналу Бг в блоке 7 вычисления функционала и всех блоках 8 вычисления частных производных происходит обнуления интег" раторов, а в блоке контроля 11 сходимости происходит запоминание текущего значения вектора параметров.Блоком 5 памяти по сигналу 11 начинается воспроизведение записанных в него экспериментальных входных и выходных сигналов объекта в принятом масштабе времени. Воспроизведение экспериментального входного сигнала начинается с синхроимпульса, по которому происходит обнуление всех интеграторов всех моделей, после чего в принятом масштабе времени в моделях осуществляется интегрирование дифференциальных уравнений объекта и на выходах моделей появляются процессы, моделирующие поведение объекта. При этом выходной сигнал каждой модели зависит от установленных в ней значений параметров, Так выходной сигнал каждой 3-й вспомогательной модели 2 у(,а+да ) имеет вариацию, вызванную малым приращением да параметра а . Выходные экспериментальные сигналы у з (1=1,п) пос" тупают на соответствующие входы сумматора 3, на другие входы которого поступают выходные сигналь основной модели 1 у,(;а). На выходе сумматора 3 формируется векторный сигнал ошибки Ау=у э(С)-уй,а), который подается на соответствующие входы всех блоков 8 вычисления частных производ(3) ных и блока 7 вычисления функционала. На другие соответствующие координатные входы всех блоков вычисления частных производных поступают выход 5 ные сигналы соответствующих вспомогательных моделей 2 и выходные сигналы основной модели 1,Во время воспроизведения из блока 5 памяти экспериментальных сигна где ду;(,а)=у;(е,а+Да )-у,(,а),у (Е,а+Ма ) - соответствующий выходной сигнал 1-й вспомогательной модели;(,а)ходной сигнал основной модели,Для реализации соотношения (3) на соответствующие установочные входы каждого 1-блока 8 вычисления частной производной с соответствующих выходов блока 6 задания уставок поступают сигналы ы.,а., Ла , с парафметрического выхода оптимизатора 10 поступает значение параметра регуляризации Ы, а с соответствующих выходов блока 4 настройки параметров значение 3-го идентифицируемого параметра а . В это же время в блоке 7вычисления функционала по всей поступающей в него необходимой информации происходит формирование выходного сигнала в соответствии с соотношением (1).К моменту времени С=Т от начала воспроизведения экспериментальных сигналов формирование выходных сигналов блока 7 вычисления Функционала и блоков 8 вычисления частных производных заканчивается. При этом полученные на выходах этих блоков значения функционала (1) и его частных производных по параметрам (3) зависят от установленных значений параметров моделей и значения параметра регуляризации Ы, При достижении текущим временем С значения Т, соответствующего концу отрезка наблюдения экспериментальных процессов, на сигнальном выходе блока 5 памяти вырабатывается синхроимпульс, который приводит к появлению управляющего сигнала П , свидетельствующего об окончании сеанса воспроизведения экспериментальных сигналов из блока лов, записанных на отрезке наблюдения О,Т 1, в блоках 8 вычислениячастных производных происходит формирование выходных сигналов в соответствии с соотношением, реализующимприближенное вычисление частной производной функционала качества (1)по параметру а памяти, и вызывает возвращение блока памяти в исходное состояние, Управляющий сигнал Бз поступает на сигнальные входы блока 12 команд и блока 4 настройки параметров.По сигналу П в блоке 4 настройки параметров происходит вычисление новых значений параметров по их запомненным старым значениям и полученной на выходах блоков 8 вычисления частных производных информации о частных производных функционала качестьа (1) по параметрам ДЕ/да. в соответствии с реализуемым этим блоком алгоритмом настройки параметров модели После поступления на сигнальный вход блока 12 команд сигнала Б на его втором выходе с задержкой по времени (время, необходимое для расчета новых значений параметров в блоке 4 настройки параметров) появляется управляющий импульс П, поступающий на управляющий вход блока 4 настройки параметров. По сигналу П в нем запоминается новое значение вектора параметров й. и передается значение на выход блока, Новые значения параметров с выхода блока 4 настройки параметров подаются на соответствующие параметрические входы всех моделей, где по этим сигналам осуществляется перенастройка параметров, и на соответствующие входы блока 11 контроля сходимости, где по сигналу Б осуществляется проверка выполнения условий достижения экстремума функционала качества по параметрам с заданной точноатью по аргументам /а и по частным производным оЕ для заданного текущего значения параметра регуляризации Ы. В блоке 11 реализуется проверка двух условий сходи- мости: по приращениям параметров за один цикл настройки и по величине компонент вектора градиента функциоманд по сигналу П возвращает схемув исходное состояние,Предлагаемая система идентификации позволяет осуществлять идентифи 5кацию параметров нелинейных объектови нестационарных параметров объектов,когда известен характер функциональных зависимостей этих параметров откомпонент вектора состояния объекта. 10Таким образом, функциональные возможности системы и область ее применения расширяются. Формула изобретения 50 Система идентификации параметров многомерного нелинейного динамического объекта, содержащая основную и вспомогательные модели, количество 20 выходов и координатных входов каждой из которых равно соответственно числу выходов и входов объекта, а количество вспомогательных моделей и параметрических входов каждой из моде лей равно числу идентифицируемых параметров, сумматор, количество выходов которого равно числу выхоцов объекта, а входов - удвоенному числу выходов объекта, блок настройки параметров, выходы которого соединены с соответствующими параметрическими входами основной модели, параметрические входы вспомогательных моделей, номера которых не совпадают с номе 35 ром своей вспомогательной модели, соединены с соответствующими выходами блока настройки параметров, выходы основной модели соединены с соответствующими первыми входами сумма тора, о т л и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей и области применения системы, в нее введены блок памяти, блок задания уставок, блок вы числения функционала, блоки вычисления частных производных, количество которых равно числу идентифицируемых параметров, оптимизатор, блок контроля сходимости, блок команд, элемент ИЛИ, блок ключей и сумматоры отклонений, включенные между каждым выходом блока настройки параметров и параметрическим входом, номер которого совпадает с номером данной вспомогательной модели,.каждой из вспомогательных моделей, другие входы сумматоров отклонений соединены с соответствующими выходами блока задания уставок, причем количествокоординатных входов блока памяти,соединенных с входами объекта, и выходов блока памяти, соединенных скоординатными входами всех моделей,равно числу входов объекта, а количество координатных входов блока памяти, соединенных с выходом объекта,и выходов блока памяти, соединенныхс соответствующими вторыми входамисумматора, равно числу выходов объекта, сигнальный выход блока памятисоединен с сигнальными входами блоканастройки параметров и блока команд,первый выход которого соединен состартовыми входами блока памяти,блока вычисления функционала, каждогоиз блоков вычисления частной производной и блока контроля сходимости,второй выход блока команд соединен суправляющими входами блока контролясходимости и блока настройки параметров, третий выход блока командсоединен с первым входом элементаИЛИ, второй вход которого соединенс сигнальным выходом блока контролясходимости, а выход - со стартовымвходом блока настройки параметров истартовым входом оптимизатора, сигнальный выход которого соединен сосбросовым входом блока команд и управляющим входом блока ключей, выходы блока настройки параметров соединены с соответствующими параметрическими входами блока контроля сходимости, параметрические выходы которого соединены с соответствующимикоммутируемыми входами блока ключей,выходы которого являются выходамисистемы, установочные входы блоканастройки параметров соединены с соответствующими установочными выходами блока задания уставок, а координатные входы блока настройки параметров и блока контроля сходимостисоединены с выходами соответствующихблоков вычисления частных производных, первый и второй установочныевходы блока контроля сходимости соединены соответственно с первым и вторым выходами блока задания уставок,третий, четвертый и пятый выходы которого соединены соответственно спервым, вторым и третьим установочными входами оптимизатора, параметрический выход которого соединен с первыми параметрическими входами каждого из блоков вычисления частной про 1314138512 гиэводной и блока вычисления функционала, выход которого соединен с координатным входом оптимизатора и соответствующим координатным входомблока контроля сходимости, выходысумматора соединены с соответствующими координатными входами каждого изблоков вычисления частной производной и координатными входами блока вычисления Функционала, параметрические входы которого соединены с соответствующими выходами блока настройки параметров, а установочные входысоединены с соответствующими выхода ми блока задания уставок, выходы каждой из вспомогательных моделей соединены с соответствующими координатными входами соответствующих блоков вычисления частной производной, выходы основной модели соединены с соответствующими координатными входами каждого из блоков вычисления частной производной, установочные входы которых соединены с соответствующими выходами блока задания уставок, а вторые параметрические входы соединены с соответствующими выходами блока настройки параметров.
СмотретьЗаявка
4005562, 06.01.1986
ПРЕДПРИЯТИЕ ПЯ А-1923
ИВАНОВ СЕРГЕЙ МИХАЙЛОВИЧ, ПЕРФИЛЬЕВ ЛЕВ МИХАЙЛОВИЧ, ЦУКАНОВ НИКОЛАЙ АНДРЕЕВИЧ, ШУСТОВ ИГОРЬ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: динамического, идентификации, многомерного, нелинейного, объекта, параметров
Опубликовано: 30.03.1988
Код ссылки
<a href="https://patents.su/11-1385122-sistema-identifikacii-parametrov-mnogomernogo-nelinejjnogo-dinamicheskogo-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Система идентификации параметров многомерного нелинейного динамического объекта</a>
Радиоэлектронный блок преимущественно для измерения параметров вращающихся объектов

Номер патента: 930774
Опубликовано: 23.05.1982
МПК: H05K 5/00
Метки: блок, вращающихся, объектов, параметров, преимущественно, радиоэлектронный
...21центрального выступа 9 и частью 3полого корпуса, фиксатор 19 имеетшлиц 26.Радиоэлектронный блок с сменнымавтономным источником питания работает следующим образом,930774 пары. При затяжке гайки 21 расположенные на противоположных сторонах печатной платы 1 разнополюсные контактные площадки 24 и 25 надежно контактируют с центральным выступом 9 и корпусом, Последующая заливка резьбовой пары связующим компаундом исключает возможноть ослабления соединения или нарушения электрического контакта. При этом существенно повышается прочность механической связи всех частей радиоэлектронного блока.Изолятор 20 может быть выполнен или в виде отдельной детали или лакокрасочного, или оксидного покрытия, при этом механически часть 3 полого корпуса и ее...
Устройство для вычисления статистических параметров контролируемого объекта
Номер патента: 481038
Опубликовано: 15.08.1975
Авторы: Дятлов, Кабанов, Милов
МПК: G06F 11/25
Метки: вычисления, контролируемого, объекта, параметров, статистических
...квдрторы 9 - 12, усредцятощцс блоки 13 - - (6, источники 17 - 19эталонцых цапр 55 кеци 11 ц вторые суммирую.щпс Олокп 20 - 22,Устройство работает следующим образом. 21 а вход контролируемого ооъекта 2, описываемого уравнением(р,1) - известные в общем случае целицейныс цестационарцые операторы;1 О поступает входной сигнал Х (1), в результатечего на его выходе возникает сигнал У (1),Кроме того, сигнал Х (1) поступает на входынелинейных фильтров 3 - 5, Выходные сигналыфильтров поступают на первые входы суммн- (5 рующих блоков 6 - 8, на второй вход которыхпоступает сигнал У(1) с выхода объекта 2. Свыходов блоков 6 - 8 сигналы У(1) - ;Ут (1)поступают ца входы квадраторов 9 - 2, н выходах которых возццкают сигналы 20l 1. Ъ(1) 7, (1). где...
Буй для подъема и обнаружения информационного блока от глубоководных объектов
Номер патента: 747053
Опубликовано: 15.05.1994
Авторы: Белов, Зыков, Мовчан, Плотников, Рябов, Филиппов
МПК: B63B 22/24
Метки: блока, буй, глубоководных, информационного, обнаружения, объектов, подъема
1. БУЙ ДЛЯ ПОДЪЕМА И ОБНАРУЖЕНИЯ ИНФОРМАЦИОННОГО БЛОКА ОТ ГЛУБОКОВОДНЫХ ОБЪЕКТОВ, включающий поплавок с расположенной на нем антенной с механизмом ее выдвижения и с радиопередатчиком, а также противовес с источником питания, связанный посредством соединительного узла с поплавком, отличающийся тем, что, с целью повышения эксплуатационных параметров, механизм выдвижения антенны содержит кронштейн, смонтированный с возможностью поворота посредством втулки относительно корпуса радиопередатчика, а также пружину, при этом антенна выполнена в виде упругой металлической ленты, прикрепленной одним концом к кронштейну, пружина установлена во втулке, при этом один конец пружины прикреплен к втулке, а другой конец пружины связан с кронштейном, причем...
Радиоэлектронный блок, преимущественнодля измерения параметров вращающихсяобектов

Номер патента: 843329
Опубликовано: 30.06.1981
МПК: H05K 5/00
Метки: блок, вращающихсяобъектов, параметров, преимущественнодля, радиоэлектронный
...2 и 3 полого корпуса обеспечивается контактированием их по цилиндрическим поверхностям или, технологически при сборке блока, при этом боковые поверхности выступов и контактируют с той частью поверхности стенок отверстий 5 в печатной плате 1, геометрические оси которых совпадают с геометрической осью печатной платы 1,В другом варианте исполнения блока часть 3 полого корпуса снабжена центральным выступом 9, который центрируя печатную плату 1 через ее центральное отверстие 10 введен в полость части 2 полого корпуса 5 1 О 15 20 25 зо 35 40 45 4и закреплен своим свободным концом эпоксидным компаундом 6.Радиоэлемент 8, например катушка индуктивности центрируется за счет контактирования ее внешней поверхности с внутренней поверхностью части...
Способ настройки модели руднотермической электропечи

Номер патента: 984068
Опубликовано: 23.12.1982
Автор: Чердовских
МПК: H05B 7/148
Метки: модели, настройки, руднотермической, электропечи
...между одной из граней и поверхностью, проходящей через его центр. Для каждого элемента необходимо определитьстолько сопротивлений, сколько онимеет граней. На фиг, 2 и 3 круж 5 нами показаны центры элементов, апрямоугольниками резисторы, замещающие упомянутые сопротивления частейэлементов объема, Причем каждьйцентр элемента объема совмещается 10 с соответствующим узлом, к которому подключаются резисторы. Сопротивления частей, прилегающих друг кдругу элементов, замещаются одним резистором. Сопротивления частей эле ментов, прилегающих к электродам 1,2 и 3 расплавленному металлу б нугольной подине 5, замещаются однимрезистором.На фиг. 2 и 3 показаны кружки 20 на поверхности электрода 1, угольной подины 5 и металлического расплава б для...
Предыдущий патент: Устройство для измерения амплитуды колебаний баланса механических часов
Следующий патент: Квазиинвариантный финитный регулятор с переменной структурой
Случайный патент: Устройство для центрирования слитка