Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
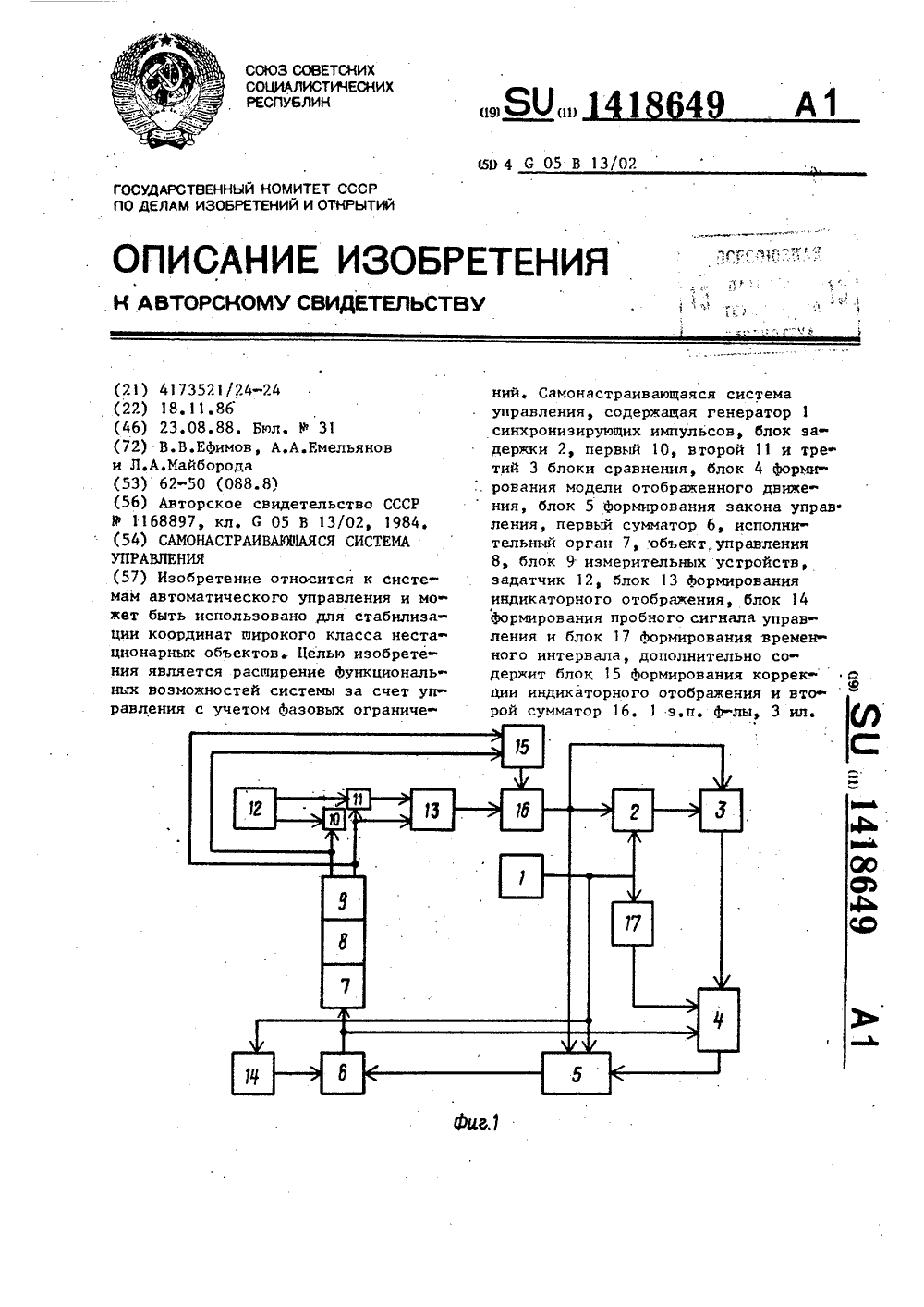
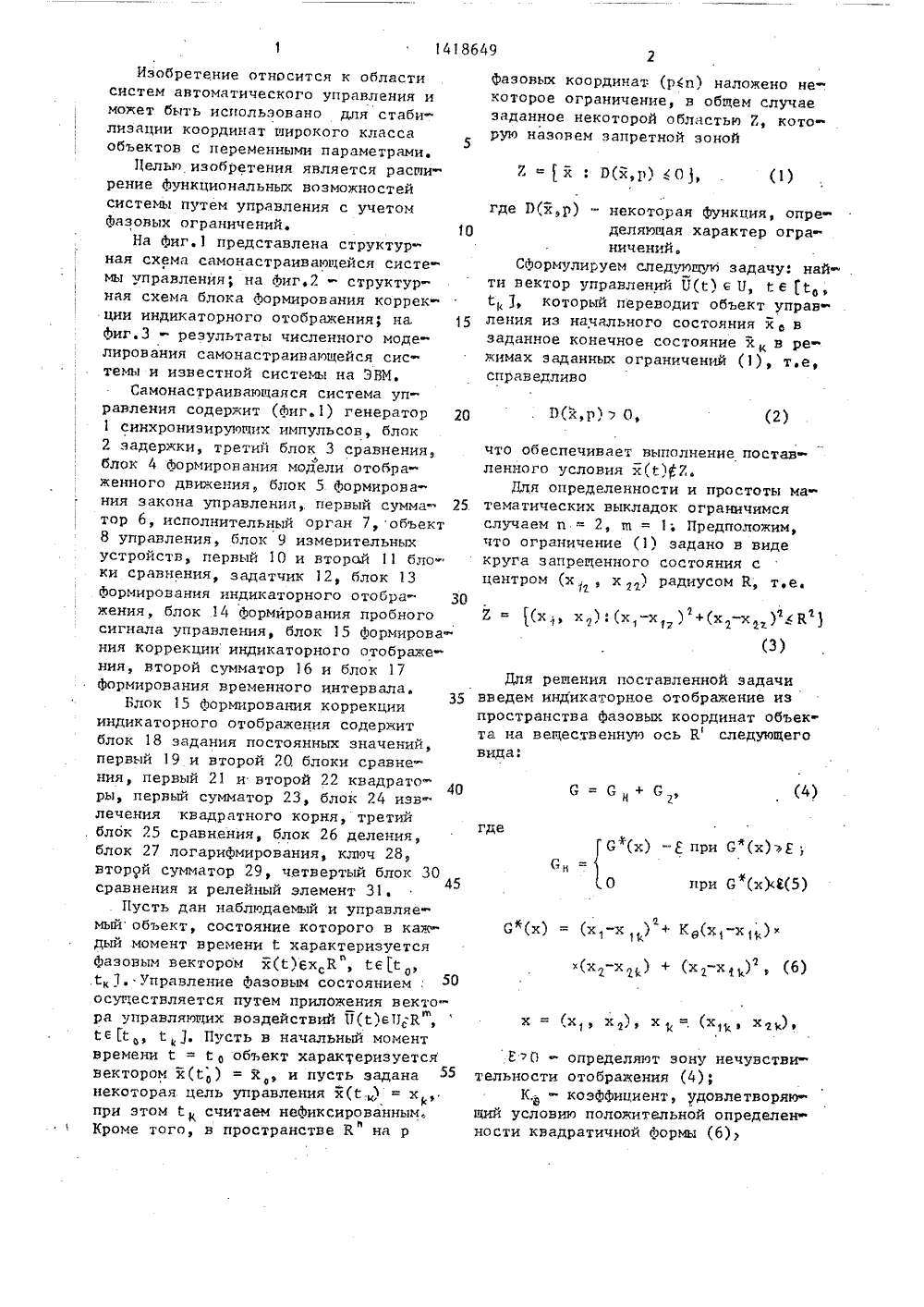
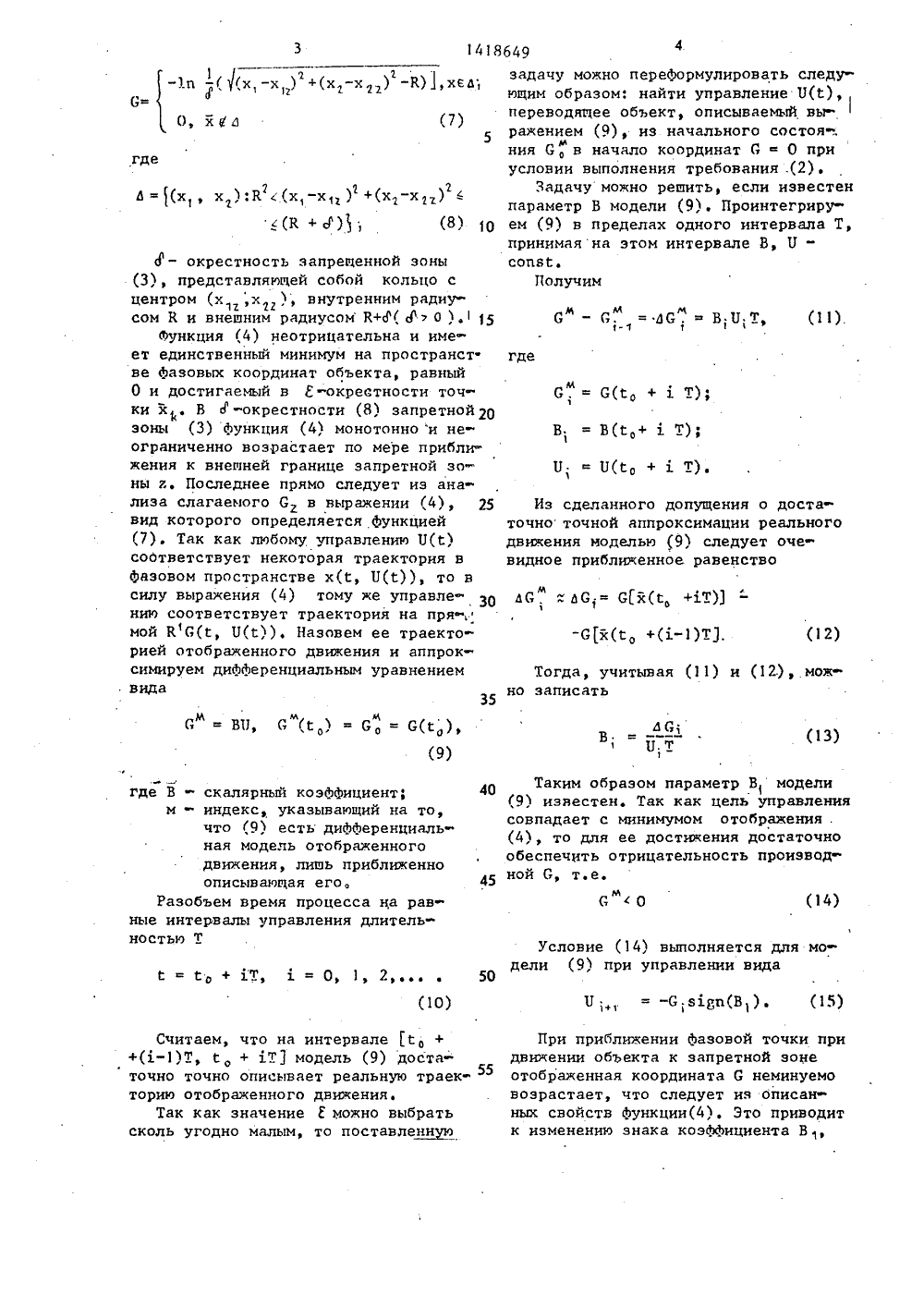
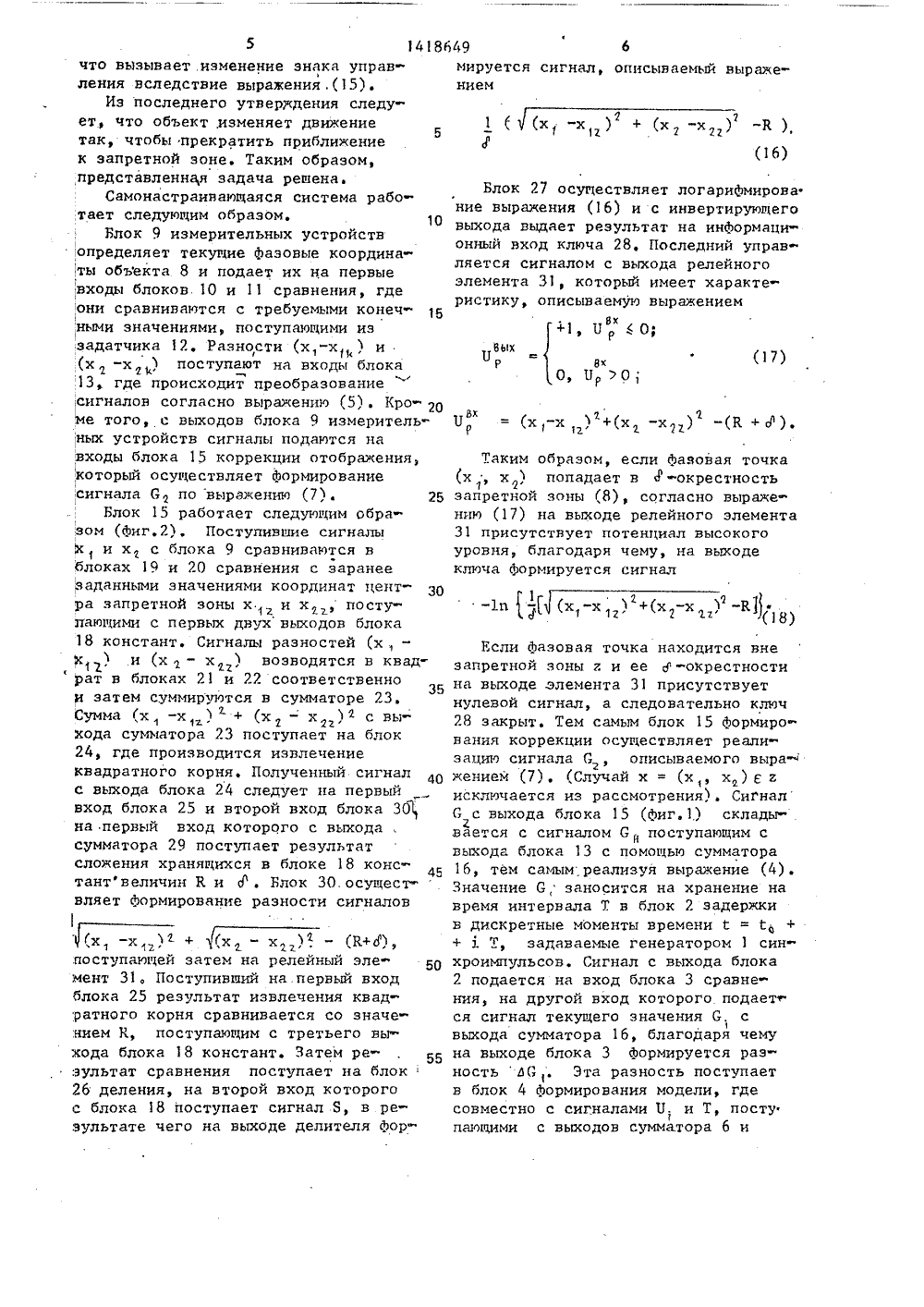
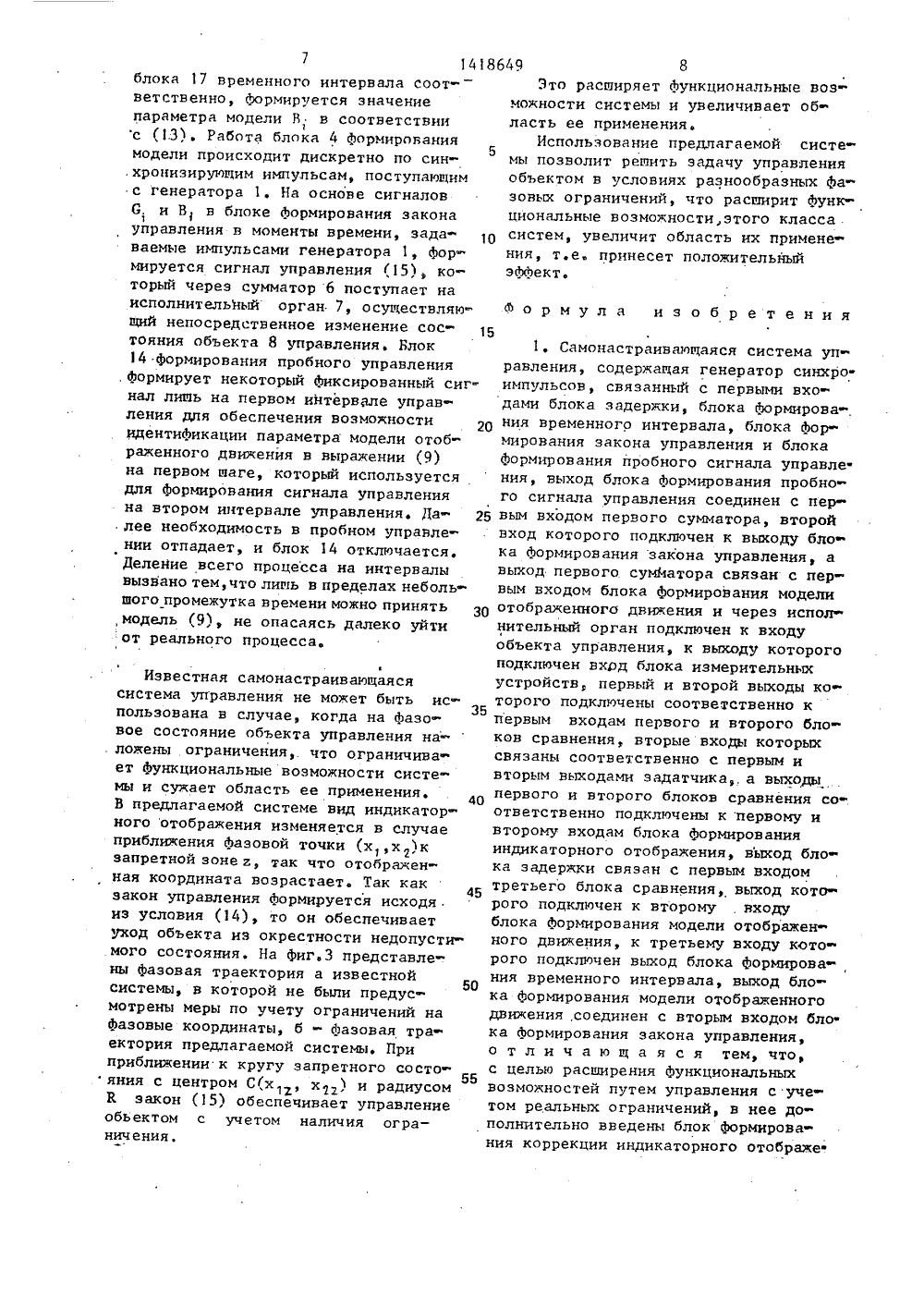
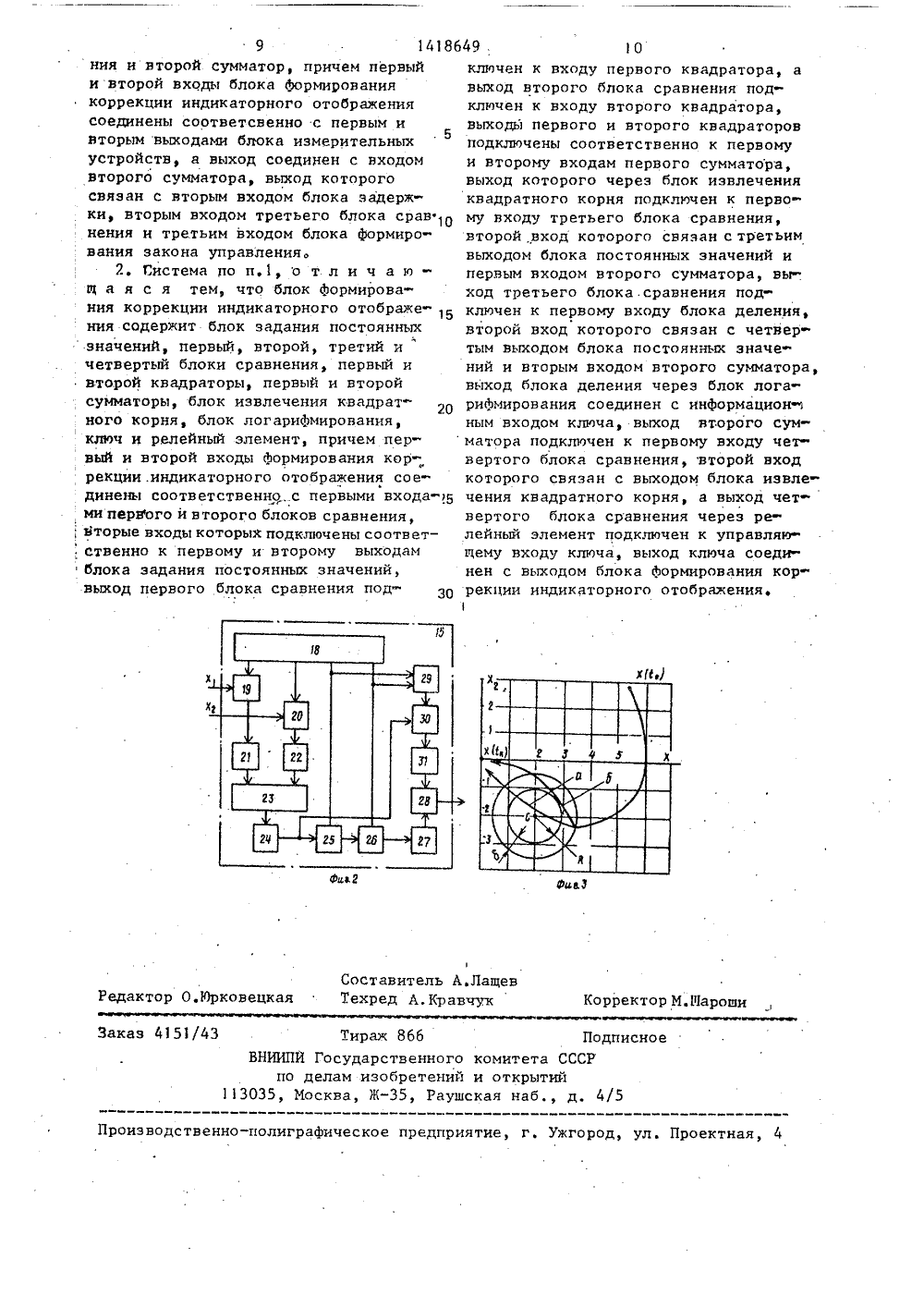
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 9) (11) 0 4 С 05 В 13/ ГОСУД ПО ДЕ САНИЕ ИЗОБРЕТЕНИ 1 , 7:.г кф ил е ВЕННЫЙ КОМИТЕТ СССРИЗОБРЕТЕНИЙ И ОТНРЫТИЙ АВТОРСКОМУ СВИДЕТЕЛЬСТ(57) Изобретение относится к системам автоматического управления и может быть использовано для стабилизации координат нирокого класса нестационарных объектов 1 елью изобретения является расширение Функциональных воэможностей системы за счет управления с учетом Ьазовых ограничений. Самонастраиваицаяся системауправления, содержацая генератор 1синхронизируищих импульсов, блок эадержки 2, первый 1 О, второй 11 и тртий 3 блоки сравнения, блок 4 Формирования модели отображенного движея, блок 5 формирования закона упр ления, первый сумматор 6, исполнительный орган 7, объект, управления8блок 9 измерительных устройств,задатчик 12, блок 13 Формированияиндикаторного отображения, блок 144 ормирования пробного сигнала управления и блок 17 Ьормирования временного интервала, дополнительно содержит блок 15 Формирования корреции индикаторного отображения и второй сумматор 16. 1 з.п. -лы, 3Изобретение относится к области систем автоматического управления и может быть использовано для стабилизации координат ииракого класса объектов с переменными параметрами.Целью изобретения является расиирение Функциональных возможностей системы путем управления с учетом Фазовых ограничений. 1 ОНа Фиг, представлена структурная схема самонастраивавщейся системы управления; на Фиг.2 - структурная схема блока Формирования коррекции индикаторного отображения; на 15 Фиг.3 - результаты численного моделирования самонастраивающейся системы и известной системы на ЭВМ.Самонастраивавщаяся система управления содержит (Фиг.1) генератор 20 1 синхронизнруищих импульсов, блок 2 задержки третий блок 3 сравнения, блок 4 Формирования модели отображенного движения, блок 5 Формирования закона управления, первый сумма тар 6, исполнительный орган 7, объект 8 управления, блок 9 измерительных устройств, первый 10 и второй 11 блоки сравнения, задатчик 12, блок 13 Формирования индикаторного атобра жения, блок 14 Фармйрования пробного сигнала управления, блок 15 Формирования коррекции индикаторного отображения, второй сумматор 16 и блок 17 Формирования временного интервала35Блок 15 Формирования коррекции индикаторного отображения содержит блок 18 задания постоянных значений, первый 19 и второй 20, блоки сравнения, первый 21 и второй 22 квадраторы, первый сумматор 23, блок 24 извлечения квадратного корня, третий блок 25 сравнения, блок 26 деления, блок 27 логариФмирования, клич 28, вторуй сумматор 29, четвертый блок 3045 сравнения и релейный элемент 31.Пусть дан наблидаемый и управляемый объект, состояние которого в каждый момент времени Г характеризуется Фазовым вектором хбх Ке с Т 1. Управление Фазовым состоянием, осуществляется путем приложения вектора управляющих воздействий П(е)еП.В г,е 1. Пусть в начальный момент времени=о объект характеризуется вектором х(1) = х, и пусть задана некоторая цель управления х(С= х при этом с к считасм неФиксированным Кроме того, в пространстве В. на рФазовых координат. (реп) наложено некоторое ограничение, в общем случаезаданное некоторой абластьв Е которук назовем запретной зоной 7. =х: П(хр)О(2) 11(хр)О,что обеспечивает выполнение поставленного условия х(117,.Для определенности и простоты математических выкладок ограничимся случаем и = 2, щ = 1; Предположим, чта ограничение (1) задано в виде круга запрещеннога состояния с центром (х, , х ) радиусом к т.е,т Е = 1(х т х)(х 1-х ) +(х-х) ( В. )(3) Для ренения наставленной задачи введем индикаторное отображение из пространства Фазовых координат объекта на вещественнун ось К следующего видаа(4) С=С еСНС(х) - Я при С(х) ъ Е; СнОх (х хг) х 1 , (х х) при С (х)сВ(5) С(х) = (х-х ) + Кв(Х "х 11,)" х(х -х ) + (хг-х)(6) Е 0 - определявт зону нечувствительности отображения (4);К, - коэФФициент, удовлетворяющий условии положительной определен ности квадратичной Формы (б) где П(хр) - некоторая Функция, определяющая характер ограничений.СФармулируем следуищуи задачу най- . ти вектор управлений 0 е П Т еЕкоторый переводит объект управления из начального состояния хв заданное конечное состояние х к в режимах заданных ограничений (1), т,е, справедливазадачу можно пере 4 юрмулировать следующим образом: найти управление Яй),переводящее объект, описываемый выражением (9), из начального состоя=ния С, в начало координат С0 принусловии выполнения требования .(2) .Задачу можно рещить, если известенпараметр В модели (9). Проинтегриру+ с); (8) 10 ем (9) в пределах одного интервала Т,принимая на этом интервале В, ив апрещенной зоны сопе.собой кольцо с Получим О, ха где д=(х, х ):К(х,(К(3), представляющейцентром (х. х ) внутренним рядиРф" сом К и вненним радиусом К+У( д 0 ), 15Функция (4) неотрицательна и имеет единственный минимум на пространстве базовых координат объекта, равный О и достигаемый в Е-окрестности точки х 1. В 1 -окрестности (8) запретной 20 эоны (3) Аункция (4) монотонно и неограниченно возрастает по мере приближения к внещней границе запретной зоны в. Последнее прямо следует из ана лиза слагаемого С в выражении (4), 25 вид которого определяется Функцией (7). Так как любому управлению 11(С) содтветствует некоторая траектория в Фазовом пространстве х(й, 11(, то в силу выражения (4) тому же управлению соответствует траектория на пря, мой КС(С, 11(, Назовем ее траекторией отображенного движения и аппроксимируем диААеренциальным уравнением вида С, = 4 С . В 1 Б; Т, (11). где Сф С( +1 Т) В = В(1 О+ Х Т)1 Ц 11(СО + Х т) дС дС, - СГх(С, +ТН 1(13) 40 Таким образом параметр В 1 модели(9) известен, Так как цель управлениясовпадает с минимумом отображения .(4), то для ее достижения достаточнообеспечить отрицательность проиэвад 45 ной С теС (О(9) где В - скалярный коэАФициент;м - индекс, указывающий на то,что (9) есть дифференциальная модель отображенногодвижения, лищь приближенноописывающая его,Разобъем время процесса ца равные интервалы управления длительностью Т Считаем, что на интервале то + +(э.-1)Т, е, + Т 3 модель (9) достаточно точно описывает реальную траекторию отображенного движения.Так как значение 1 можно выбрать сколь угодно малым, то поставленную Из сделанного допущения о достаточно точной аппроксимации реального движения моделью (9) следует оче видное приближенное равенство Тогда, учитывая (11) и (12)можно записать Условие (14) выполняется для модели (9) при управлении вида При приближении азовой точки прн движении объекта к запретной зоне отображенная координата С неминуемо возрастает, что следует из описанных свойств Ьункции(4). Это приводит к изменению знака коэициента В 1,1486 что вызывает .изменение знака управления вследствие выражения,(15).Из последнего утвер(дения следует, что объект изменяет двкжение так, чтобы прекратить приближение к запретной зоне. Таким образом, представленная задача решена.Самонастраивающаяся система рабо,тает следующим образом. 10Блок 9 измерительных устройств определяет текущие Фаэовые координаты объекта 8 и подает их на первые входы блоков. 10 и 11 сравнения, где ,они сравниваются с требуемыми конеч,ными значениями, поступающими из задатчика 12, Разности (х-х ) и (х-х ) поступают на входы блока 13, где происходит преобразование сигналон согласно выражению (5). Кро О ме того, с выходов блока 9 измерительных устройств сигналы подаются на входы блока 15 коррекции отображения, который осуществляет йормирование сигнала С по выражению (7), 25Блок 15 работает следующим обра,зом (Лиг.2). Поступившие сигналы Хи х с блока 9 сравниваются в блоках 19 и 20 сравнения с заранее заданными значениями координат центра запретной зоны хи х , поступающими с первых двух выходов блока 18 констант. Сигналы разностей (х- Х 7) .и (х 2 - х ) возводятся в квад" рат в блоках 21 и 22 соответственно35 и затем суммируится в сумматоре 23. Су (1 -х , )+ (х, - ххода сумматора 23 поступает на блок 24, где производится извлечение квадратного корня, Полученный сигнал 4 О с выхода блока 24 следует на первый вход блока 25 и второй вход блока 30 на первый вход которого с выхода, сумматора 29 поступает результат сложения хранящихся в блоке 18 конс таитвеличин К и У . Блок 30.осущест-вляет Ьормирование разности сигналов 1(х -х + (х- х) . (К+ 9 поступающей затем на релейный эле- бО мент 31, Поступивший на первый вход блока 25 результат извлечения квадратного корня сравнивается со значением К, поступающим с третьего выхода блока 18 констант. Затем результат сравнения поступает на блок26 деления, на второй вход которого с блока 18 поступает сигнал Я, в результате чего на выходе делителя Лор 49 бмируется сигнал, описываемый выраже- нием 1 ( (х -х, ) + (х -х ) -К),2(16) Блок 27 осуществляет логаримирона ние выражения (16) и с инвертируищего выхода выдает результат на информационный вход ключа 28, Последний управляется сигналом с выхода релейного элемента 31, который имеет характеристику, описываемую выражением= (х - ) "+(х, - ) -(К + )Таким образом, если Аазовая точка (х , х ) попадает в Г -окрестность зайретйой эоны (8), согласно выражении (17) на выходе релейного элемента 31 присутствует потенциал высокого уровня, благодаря чему, на выходе клича деформируется сигнал-1 п (-( (х -х 1 +(х -х 1 "к 1 2 Ь. ( 8) Если йазовая точка находится вне запретной зоны к и ее К -окрестности на выходе элемента 31 присутствует нулевой сигнал, а следовательно ключ 28 закрыт. Тем самым блок 15 Формирования коррекции осуществляет реализацию сигнала С , описываемого выра- жением (7). (Случай х = (х х) еисключается из рассмотрения). Сигнал С с выхода блока 15 (Лиг.1) складывается с сигналом Споступающим с выхода блока 13 с помощью сумматора 16, тем самым реализуя выражение (4). Значение С, заносится на хранение на время интервала Т н блок 2 задержки и дискретные моменты времени 1 = й + +Т, задаваемые генератором 1 синхроимпульсов. Сигнал с выхода блока 2 подается на вход блока 3 сравнения, на другой вход которого подает ся сигнал текущего значения С, с1выхода сумматора 16, благодаря чему на выходе блока 3 Формируется разностьдС,. Эта разность поступает н блок 4 йормиронания модели, где совместно с сигналами 11. и Т, посту пающими с выходов сумматора б и7 14186 блока 17 временного интервала соответственно, формируется значение параметра модели В в соответствии с (1.3). Работа блока 4 Аормирования5 модели происходит дискретно по син.хрониэируищим импупьсам, поступающим с генератора 1, На основе сигналов С. и В 1 в блоке Аормирования закона1управления в моменты времени, задаваемые импульсами генератора 1, Формируется сигнал управления (15), который через сумматор б поступает на исполнительный орган 7, осуществляющий непосредстненное изменение состояния объекта 8 управления. Блок 14 ормирования пробного управления , Формирует некоторый Фиксированный сигнал лишь на первом интервале управления для обеспечения возможности идентификации параметра модели отображенного днюения в выражении (9) на первом шаге, который используется для формирования сигнала управления на втором интервале управления. Ла .лее необходимость в пробном управлении отпадает, и блок 14 отключается. Деление всего процесса на интервалы вызвано тем,что лишь в пределах небольшого промежутка времени можно принять ,модель (9), не опасаясь далеко уйти от реального процесса. 1. Самонастраивающаяся система управления, содержащая генератор синхроимпульсов, связанный с первыми входами блока задержки, блока йормирования временного интервала, блока формирования закона управления и блока 4 ормирования пробного сигнала управле. ния, выход блока Аормирования пробного сигнала управления соединен с первым входом первого сумматора, второй вход которого подключен к выходу бло ка Аормирования закона управления, а выход первого. сумматора связан с первым входом блока Формирования модели отображенного движения и через исполнительный орган подключен к входу объекта управления, к выходу которого подключен вхрд блока измерительных устройств, первый и второй выходы ко торого подключены соответственно к первым входам первого и второго блоков сравнения, вторые входы которых связаны соответственно с первым и вторым выходами задатчика,. а выходы первого и второго блоков сравнения со ответственно подключены к первому и второму входам блока Формирования индикаторного отображения, выход блока задержки связан с первым входом третьего блока сравнения, выход кото рого подключен к второму входу блока Аормирования модели отображенного движения, к третьему входу которого подключен выход блока ормнрова " ния временного интервала, выход блока Формирования модели отображенного движения, соединен с вторым входом блока Формирования закона управления, о т л и ч а и щ а я с я тем, что, с целью расширения Функциональных воэможностей путем управления с учетом реальных ограничений, в нее дополнительно введены блок формирования коррекции индикаторного отображе 6Известная самонастраивающаясясистема управления не может быть ис 35пользована в случае, когда на азовое состояние объекта управления на- ложены ограничения,. что ограничивает Функциональные возможности системы и сужает область ее применения.В предлагаемой системе вид индикаторного отображения изменяется в случаеприближения Ьаэовой точки (х,х )кзапретной зоне з, так что отображенная координата нозрастает. Так как45закон управления формируется исходяиз условия (14), то он обеспечиваетуход объекта из окрестности недопустимого состояния. На Фиг.З представлены фазовая траектория а известнойсистемы, в которой не были предусмотрены меры по учету ограничений наАазовые координаты, б - фазовая траектория предлагаемой системы. Приприближении к кругу запретного состо 55яния с центром С (х, х) и радиусомК закон (15) обеспечивает управлениеобьектом с учетом наличия ограничения. 49 8Это расширяет Аункциональные возможности системы и увеличинает область ее применения.Использование предлагаемой системы позволит решить задачу управления объектом в условиях разнообразных Фазовых ограничений, что расширит Функциональные воэможности, этого класса . систем, увеличит область их применения, т.е. принесет положительный эААект. Ф о р м у л а и э о б р е т е н и я1 О 1Составитель А.Лащевая Техред А.Кравчук Корректор М,Иароши ктор О.йр Тираж 866 ВНИИПИ Государственно по делам изобретен 13035, Москва, Ж, Раий водственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 9 14186 ния и второй сумматор, причем первый и второй входы блока формирования коррекции индикаторного отображения соединены соответсвенно с первым и. Б вторым выходами блока измерительных устройств, а выход соединен с входом второго сумматора, выход которого связан с вторым входом блока задержки, вторым входом третьего блока срав 1 О нения н третьим входом блока формирования закона управления.2. Гистема по п.1, о т л и ч а ющ а я с я тем, что блок формирования коррекции индикаторного отображе ния содержит блок задания постоянных значений, первый, второй, третий и четвертый блоки сравнения, первый и второй квадраторы, первый и второй сумматоры, блок извлечения квадрат ного корня, блок логарифмирования, ключ и релейный элемент, причем первый и второй входы формирования коррекции .индикаторного отображения соединены соответственно.с первыми входа-В ми первого и второго блоков сравнения, ; вторые входы которых подключены соответственно к первому и второму выходам блока задания постоянных значений, выход первого блока сравнения подключен к входу первого квадратора, авыход второго блока сравнения подключен к входу второго квадратора,выходы первого и второго квадраторовподключены соответственно к первомуи второму входам первого сумматора,выход которого через блок извлеченияквадратного корня подключен к первому входу третьего блока сравнения,второй вход которого связан с третьимвыходом блока постоянных значений ипервым входом второго сумматора, выход третьего блока. сравнения подключен к первому входу блока деления,второй вход которого связан с четвертым выходом блока постоянных значений и вторым входом второго сумматора,выход блока деления через блок логарифмирования соединен с информационным входом ключа, выход второго сумматора подключен к первому входу четвертого блока сравнения, второй входкоторого связан с выходом блока извлечения квадратного корня, а выход четвертого блока сравнения через релейный элемент подключен к управлявщему входу ключа, выход ключа соединен с выходом блока формирования коррекции индикаторного отображения,
СмотретьЗаявка
4173521, 18.11.1986
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
ЕФИМОВ ВЛАДИМИР ВАСИЛЬЕВИЧ, ЕМЕЛЬЯНОВ АНДРЕЙ АНАТОЛЬЕВИЧ, МАЙБОРОДА ЛЕОНИД АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 23.08.1988
Код ссылки
<a href="https://patents.su/6-1418649-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Адаптивный анализатор спектра

Номер патента: 1777097
Опубликовано: 23.11.1992
МПК: G01R 23/16
Метки: адаптивный, анализатор, спектра
...линейного предсказания, первые, вторые и третьи входы синхронизации всех вычислительных каскадов 23-123-М объединены и являются соответственно первым, вторым и третьим входами синхронизации блока 6 вычисления коэффициентов линейного предсказания, при этом каждый вычислительный каскад 23 Л содержит ряд из ПЛ умножителей 24-124-М, ряд из М сумматоров 25- 1.25-М и блок 26 задержки, 1-й информационный вход (1=1 М) М-го каскада 23-М соединен с первым входом 1-го умно- жителя 24- и первым входом 1-го сумматора 25-1, вторые входы умножителей 24-124-М объединены и соединены с (М+1)-м входом каскада и подключены к первому входу блока 26 задержки, выход 1-го умножителя 24-1 соединен со вторым входом (М+1)-го сумматора 25-М-+1), выход 1-го...
Способ управления регенерацией информации в блоках динамической памяти

Номер патента: 982081
Опубликовано: 15.12.1982
Авторы: Бандаков, Батрак, Букин, Васильев, Колчанов, Лубрик, Мясоедов
МПК: G11C 11/401, G11C 11/406, G11C 7/08
Метки: блоках, динамической, информации, памяти, регенерацией
...подается на 1-е атроку блока10.1 динамической памяти 3, затем поего окончании - на 1-ю строку блока10.2 динамической памяти 3 и т,д,до блока 10 п, Затем вырабатываетсяимпульс регенерации 2-й строки дляблока 10. динамической памяти 3,блока 10.2 динамической памяти 3 ит.д. пока не пройдет регенерацияинформации по всем строкам всех иблоков динамической памяти 3.Устройство работает следующим образомРаспределитель 5 на каждом из ивыходов вырабатывает импульсы непрерывной последовательности, причемимпульс на очередном выходе появляется после окончания импульса напредыдущем выходе. Импульс с первого выхода распределителя 5, поступает на второй вход блока 7 запросовблока формирования адреса регенерации 2.1.Если на входы дешифратора 4 выбо,ра...
Устройство для отображения информации на экране телевизионного приемника

Номер патента: 1265834
Опубликовано: 23.10.1986
Автор: Розенштейн
МПК: G09G 1/16
Метки: информации, отображения, приемника, телевизионного, экране
...на фиг.7 - принципиальная электрическая схема смесителя; на Фиг.8 - диаграмма распределения импульсов на выходах распределителя импульсов устройства; на фиг.9 - диаграмма работы устройства в реяиме записи информации.Устройство для отображения информации на экране телевизионного приемника содержит задающий генератор 1, преобразователь 2 кодов, знакогенератор 3, блок 4 оперативной памяти, счетчик 5 телевизионных строк,. блок 6 управления, счетчик 7 знаковых строк, формирователь 8 синхросигналов, мультиплексор 9 адреса, счетчик 10 знаков, смеситель 11, формирователь 12 маркерного импульса, триггер 13, дешифратор 14, распределитель 15 импульсов, буферный регистр 16, первый вход 17 устройства, второй вход 18 устройства, третий вход 19...
Устройство для контроля логических блоков

Номер патента: 1352624
Опубликовано: 15.11.1987
Авторы: Вилинский, Гроль, Журбенко, Иванов, Карачун, Романкевич, Старовойт
МПК: G06F 11/30
Метки: блоков, логических
...также подачу по заранее определенным контактам детерминированной испытательной последовательности.но существенно только при поступлении тактового сигнала, стробирующего занесение информации с "парафазных" входных контактов в объект контроля,Введение режима парафазности обеспечивает возможность проверки блоков, содержащих, например, тактируемые КБ-триггеры, для которых наличие одинаковых сигналов на К и Б-входах в момент снятия тактового сигнала приводит к неопределенному сосостоянию выхода триггера.Отработка режима парафазности происходит в два цикла. В первом цик. ле режима совпадения единичного признака псевдослучайности (ПС=1) по второму выходу блока 11 памяти и признака парафазности (ПФ = 1) по второму выходу блока 3 памяти приво....
Устройство для отображения информации на экране телевизионного приемника

Номер патента: 1410717
Опубликовано: 15.09.1990
Автор: Ларгин
МПК: G09G 1/16
Метки: информации, отображения, приемника, телевизионного, экране
...формирователь видеосигнала10 из яркостного теневизионного сигнала, поступающего на его первыйвход, и кадровых и строчных синхроимпульсов, поступающих на второй еговход, формирует полный телевизионный сигнал, который поступает на входТВ-приемника 11, Одновременно с преобразованием цифрового сигнала в полный видеосигнал происходит анализкодов, считываемых из блока памяти,20 Устройство для отображения информации на экране телевизионного приемника, содержащее аналого-цифровой преобразователь, вход которого явля ется информационным входом устройст ва, выход соединен с информационным входом формирователя импульсов записи, первый выход которого соединен с информационным входом блока памяти,45 50 14107 Анализ кодов осуществляется блоком12...
Предыдущий патент: Регулятор с релейной характеристикой
Следующий патент: Устройство для управления
Случайный патент: Способ электролитического осаждения сплавахром —кобальт