Система автоматического регулирования положения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
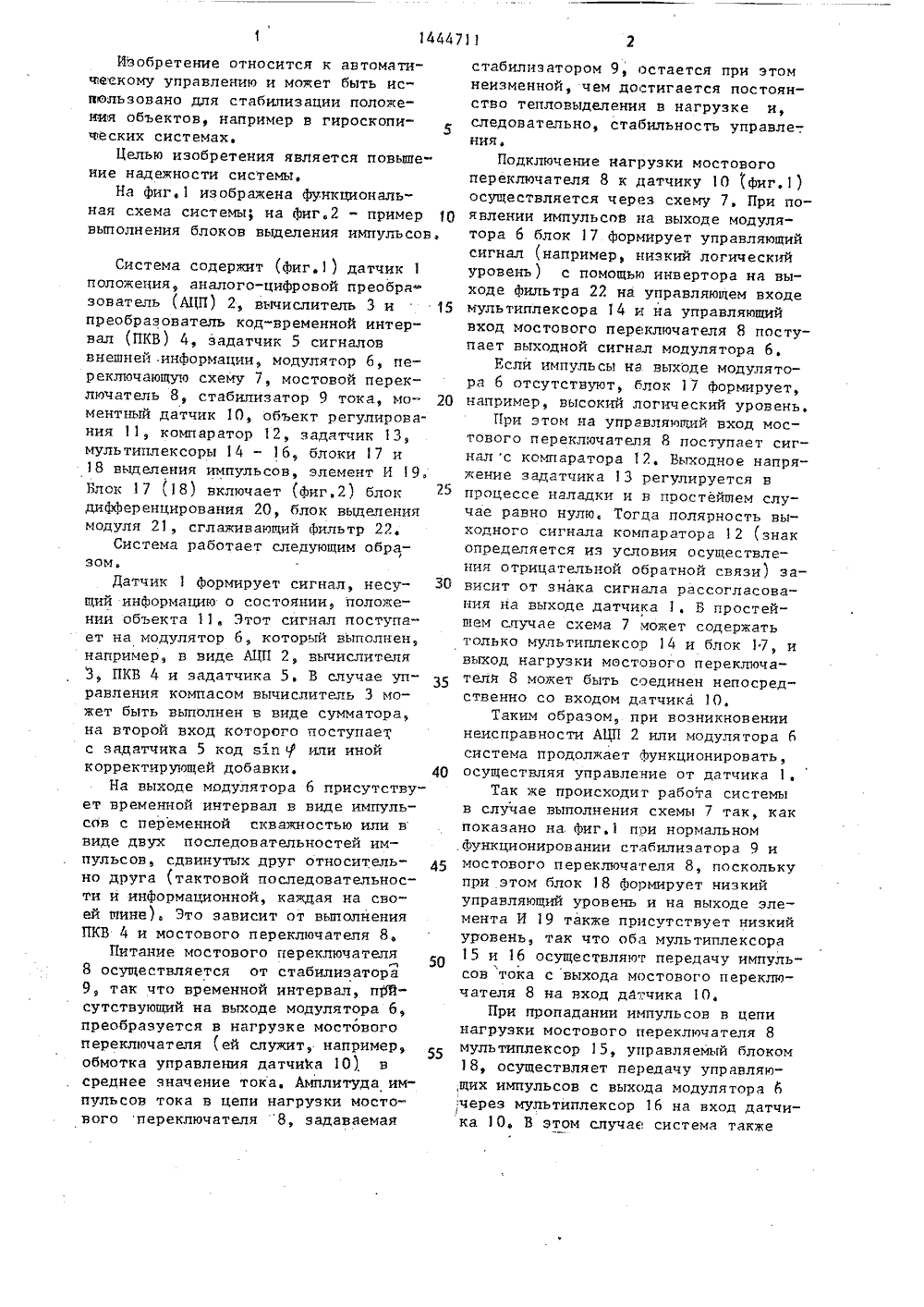
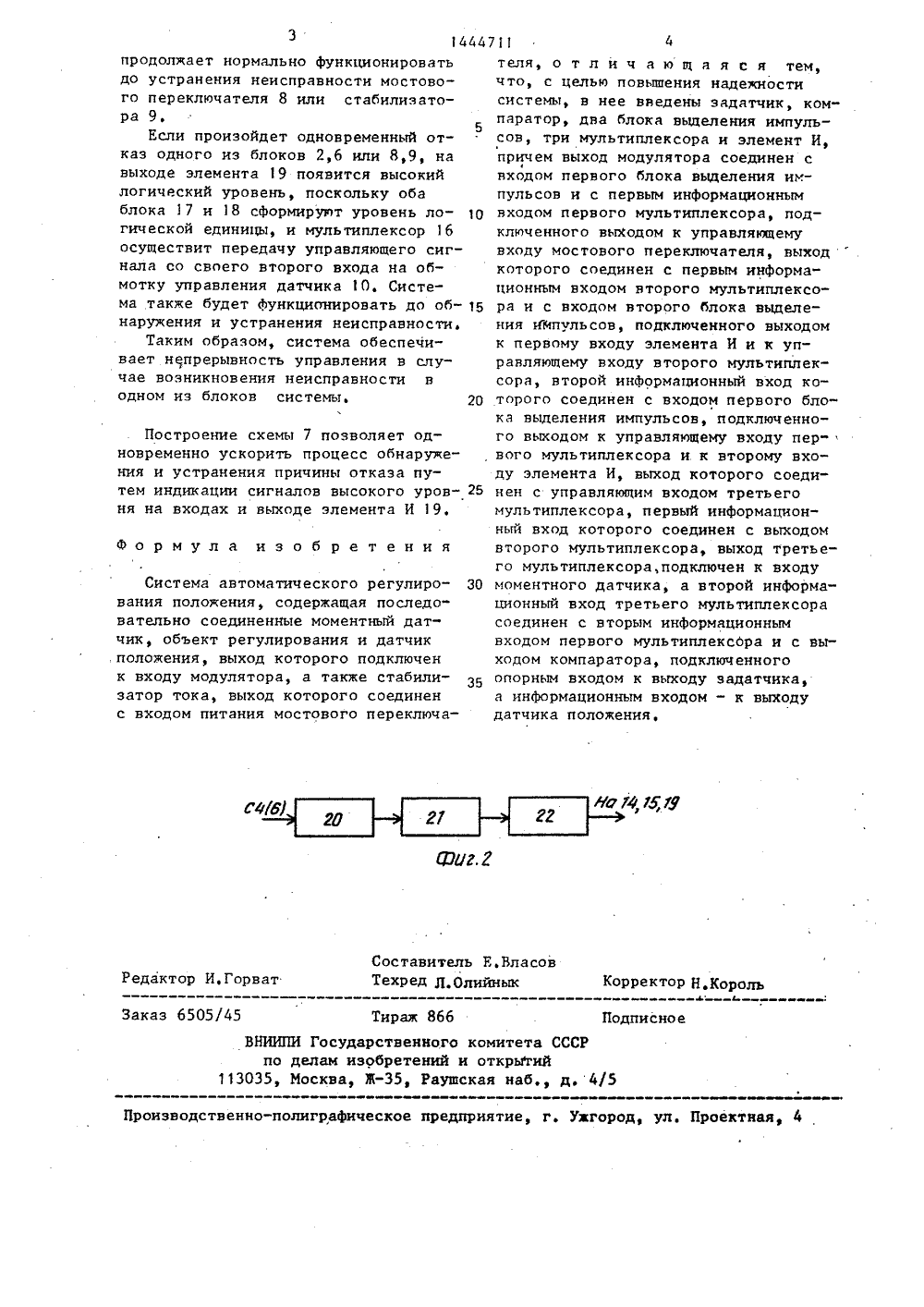
.-.:. ИСАНИЕ ИЗОБРЕТЕНИ ЬСТВ сюхно, .Рубан стемы /П М.: Выс ГироскопиМ,: Высшая СКОГО РЕГУЛ тся к облас ния и может ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ АВТОРСКОМУ СВИД(54) СИСТЕМА АВТОМАТИЧРОВАНИЯ ПОЛОЖЕНИЯ,(57) Изобретение относавтоматического управл быть использовано для стабилизацииположения объектов, например в гироскопических системах, Целью изобретения является повышение надежностисистемы. Система содержит датчик положения 1, модулятор б, переключающую схему 7, моментный датчик 10,объект регулирования 11, стабилизатор тока 9, мостовой переключатель8, мультиплексоры 14,15, 1 б, блокивыделения импульсов 17,18, элементИ 19. При возникновении неисправности в одном из блоков системы с помощью схемы 7 осуществляется автоматическая перестройка структуры системы, обеспечивающая непрерывное управление объектом 11. 2 ил,Изобретение относится к автоматическому управлению и может быть использовано для стабилизации положения объектов, например в гироскопических системах.Целью изобретения является повыше ние надежности системы.На Фиг.1 изображена функциональная схема системы; на Фиг.2 " пример 10 выполнения блоков выделения импульсов. Система содержит (Фиг.1) датчик 1 положения, аналого-цифровой преобразователь (АЦП) 2, вычислитель 3 и 15 преобразователь код-временной интервал (ПКВ) 4, задатчик 5 сигналов внешней информации, модулятор 6, переключающую схему 7, мостовой переключатель 8, стабилизатор 9 тока, мо ментный датчик 10, объект регулирования 11, компаратор 12, задятчик 13, мультиплексоры 14 - 16, блоки 17 и 18 выделения импульсов, элемент И 19. Блок 17 (18) включает (Фиг.2) блок диФФеренцирования 20, блок выделения модуля 21, сглаживающий фильтр 22,Система работает следунпцим образом.Датчик 1 Формирует сигнал, несу щий информацию о состоянии, положении объекта 11. Этот сигнал поступает на модулятор б, который выполнен, например, в виде АЦП 2, вычислителя 3, ПКВ 4 и задатчика 5, В случае управления компасом вычислитель 3 может быть выполнен в виде сумматора, на второй вход которого поступает с задатчика 5 код зхпили иной корректирующей добавки, 40На выходе модулятора б присутствует временной интервал в виде импульсов с переменной скважностью или в виде двух последовательностей импульсов, сдвинутых друг относительно друга (тактовой последовательности и информационной, каждая на своей шине)Это зависит от выполнения ПКВ 4 и мостового переключателя 8.Питание мостового переключателя 8 осуществляется от стабилизатора 9, так что временной интервал, п 1 Ф- сутствующий на выходе модулятора 6, преобразуется в нагрузке мостового переключателя (ей служит, напРимеР, обмотка управления датчиКа 10) в среднее значение тока. Амплитуда импульсов тока в цепи нагрузки мостового переключателя 8, задаваемая стабилизатором 9, остается при этомнеизменной, чем достигается постоянство тепловыделения в нагрузке и,следовательно, стабильность управле-.ния,Подключение нагрузки мостовогопереключателя 8 к датчику 1 О (фиг.1)осуществляется через схему 7, При появлении импульсов на выходе модулятора б блок 17 формирует управляющийсигнал (например, низкий логическийуровень) с помощьн инвертора на выходе Фильтра 22 на управляющем входемультиплексора 14 и на управляющийвход мостового переключателя 8 поступает выходной сигнал модулятора б,Если импульсы на выходе модулятора б отсутствуют, блок 17 формирует,например, высокий логический уровень.При этом на управляющий вход мостового переключателя 8 поступает сигнал с компаратора 12. Выходное напряжение задатчика 13 регулируется впроцессе наладки и в простейшем случае равно нулю, Тогда полярность выходного сигнала компаратора 2 (знакопределяется из условия осуществления отрицательной обратной связи) зависит от знака сигнала рассогласования на выходе датчика 1. Б простейшем случае схема 7 может содержатьтолько мультиплексор 14 и блок 17, ивыход нагрузки мостового переключателя 8 может быть соединен непосредственно со входом датчика 10,Таким образом, при возникновениинеисправности АЦП 2 или модулятора 6система продолжает функционировать,осуществляя управление от датчика 1,Так же происходит работа системыв случае выполнения схемы 7 так, какпоказано на. Фиг.1 при нормальномфункционировании стабилизатора 9 имостового переключагеля 8, посколькупри этом блок 18 Формирует низкийуправляющий уровень и на выходе элемента И 19 также присутствует низкийуровень, так что оба мультиплексора15 и 16 осуществляют передачу импульсов тока с выхода мостового переключателя 8 на вход датчика 10.При пропадании импульсов в цепинагрузки мостового переключателя 8мультиплексор 15, управляемый блоком18, осуществляет передачу управляю,щих импульсов с выхода модулятора 6,через мультиплексор 1 б на вход датчика 10. В этом случае система также44711 Составитель Е,ВласовТехред д, Олийнык едактор И.Горват ектор Я.Коро Заказ 6505 45 6 Тираж ВНИИПИ Государстнен по делам изобрете 3035, Москва, Ж, Подписное ого комитета СССРий и открыгийаушская наб д. 4/ роизводственно-полиграфическое предприятие, г. Ужгород, ул. Проектна 314продолжает нормально функционироватьдо устранения неисправности мостового переключателя 8 или стабилизатора 9,Если произойдет одновременный отказ одного из блоков 2,6 или 8,9, навыходе элемента 19 появится высокийлогический уровень, поскольку обаблока 17 и 18 сформируют уровень логической единицы, и мультиплексор 16осуществит передачу управляющего сигнала со своего второго входа на обмотку управления датчика 10, Система также будет функционировать до обнаружения и устранения неисправности.Таким образом, система обеспечивает непрерывность управления в случае возникновения неисправности водном из блоков системы,Построение схемы 7 позволяет одновременно ускорить процесс обнаружения и устранения причины отказа путем индикации сигналов высокого уровня на входах и выходе элемента И 19. Формула изобретения Система автоматического регулирования положения, содержащая последовательно соединенные моментный датчик, объект регулирования и датчик положения, выход которого подключен к входу модулятора, а также стабилизатор тока, выход которого соединен с входом питания мостового переключателя, о т л и ч а ю щ а я с я тем,что, с целью повышения надежностисистемы, в нее введены задатчик, ком 5паратор, два блока вьщеления импульсов, три мультиплексора и элемент И,причем выход модулятора соединен сФвходом первого блока вьщеления импульсов и с первым информационнымвходом первого мультиплексора, подключенного выходом к управляющемувходу мостового переключателя, выходкоторого соединен с первым информационным нходом второго мультиплексо 15 ра и с входом второго блока вьщеления ьЖпульсов, подключенного выходомк первому входу элемента И и к управляющему входу второго мультиплексора, второй информационный вход ко 20 торого соединен с входом первого блока ньщеления импульсов, подключенного выходом к управляющему входу пер"ного мультиплексора и к второму входу элемента И, выход которого соеди 25 нен с управляющим входом третьегомультиплексора, первый информационный вход которого соединен с выходомвторого мультиплексора, выход третьего мультиплексора, подключен к входу30 моментного датчика, а второй информа"ционный вход третьего мультиплексорасоединен с нторым информационнымвходом первого мультиплексора и с выходом компаратора, подключенногоопорным входом к выходу задатчика,а информационным входом - к выходудатчика положения,
СмотретьЗаявка
4129678, 30.09.1986
ПРЕДПРИЯТИЕ ПЯ В-8618
АЛЬТШУЛЕР ВИКТОР СЕРГЕЕВИЧ, ВАСЮХНО АНАТОЛИЙ АЛЕКСЕЕВИЧ, ВОЛКОВ ЛЕВ НИКОЛАЕВИЧ, ОРЛОВ АНДРЕЙ ВАЛЕНТИНОВИЧ, РУБАН НИКОЛАЙ ПЕТРОВИЧ, ФИЛАТОВ ВИКТОР МИТРОФАНОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: положения
Опубликовано: 15.12.1988
Код ссылки
<a href="https://patents.su/3-1444711-sistema-avtomaticheskogo-regulirovaniya-polozheniya.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического регулирования положения</a>
Мостовой переключатель

Номер патента: 1137578
Опубликовано: 30.01.1985
Авторы: Альтшулер, Васюхно, Волков, Голых, Орлов, Филатов
МПК: H03K 17/56
Метки: мостовой, переключатель
...первья выход блока гальва"нической развязки соединен с вторымвходом второго дифференцирующегоблока и подключен к аноду первоговентильного элемента, катод которого соединен с первым входом первогодифференцирующего блока, второй вы-ход блока гальванической развязкисоединен с вторым входом первого дифференцирующего блока и подключен каноцу второго вентильного элемента,катод которого соединен с первым входом второго дифференцирующего блока,выходы дифференцирующих блоков подключены к входам активных фильтровнижних частот, выходы которых соединены с управляющими входами управляемых аттенюаторов, входы управляемыхаттенюаторов подключены к управляющим шинам устройства, а выходы управ"ляемых аттенюаторов соединены с попарно объединенными...
Генератор импульсов тока

Номер патента: 938369
Опубликовано: 23.06.1982
Авторы: Андреев, Драчев, Христов
МПК: H03K 3/017
...равной требуемой частоте следования импульсов перемагничивания сердечника. Программныйгенератор 2 вырабатывает командусинхронизации отдельных узлов генератора, На выходе запоминающегоустройства 1 изменяется код адресаданных, и на выходах появляется цифровой код (слово), хранящийся поадресу, определяемому содержимымсчетчика 3 адреса.Часть двоичных разрядов прочитан.- фо ного слова определяет адрес формирователя импульсов с постоянным временным положением, часть разрядов -адрес формирователей импульсов спеременным временным положением, ачасть - временное положение импульса тока, генерируемого формирователем импульсов с переменным временнымположением,Таким образом, в результате чтеМ ния слова данных имеется информация, о том, какой...
Импульсный радиолокатор

Номер патента: 1840927
Опубликовано: 20.09.2014
Автор: Романов
МПК: G01S 13/06
Метки: импульсный, радиолокатор
1. Импульсный радиолокатор, содержащий антенну, подключенную через антенный коммутатор к выходу усилителя мощности и к первому входу первого преобразователя частоты, последовательно включенные второй преобразователь частоты, согласованный фильтр и первый детектор, первый амплитудный модулятор и первый однополосный модулятор, выходы которых подключены к входам усилителя мощности, первый генератор, подключенный выходом к первому входу первого однополосного модулятора и второму входу первого преобразователя частоты, второй генератор, подключенный выходом к первым входам второго преобразователя частоты и второго однополосного модулятора, второй вход которого подключен к выходу формирователя импульсов, генератор синхроимпульсов, первый выход...
Устройство для измерения электрических величин

Номер патента: 1525592
Опубликовано: 30.11.1989
Автор: Шенфельд
МПК: G01R 19/00
Метки: величин, электрических
...градуировки, то при использовании метода 50 широтно-импульсной модуляции корректировка уровня оп эного тока 1непроизводится. В с,учые изменениямысштаба коэьцциента К , т.е. отклонения э, от зада:,чого известного числа, например из-за измененияокружающей температуры, производитсякорректировка уров 1,. путем подачи от корректирующего олока 33 добаВочного тока 4 1 ;5Далее после проведения нескольких циклов проверки исходной точки и масштабного коэффициента К снивф мают образцовую гирю 15 с чашки 14 и вводят измеряемую электрическую величину 1 во второй электрический контур 7 путем замыкания выключателя 23, при этом создается разбаланс чувствительного элемента 1 на величину д х, который отрабатывается по току 1. Ток 1 , измеряется, как и...
Устройство для автоматического управления питанием барабанного котлоагрегата

Номер патента: 861841
Опубликовано: 07.09.1981
Автор: Новиков
МПК: F22D 5/30
Метки: барабанного, котлоагрегата, питанием
...13, соединенные с команднымблоком 14, и блок 15 подстройки параметров, подключенный к блоку 14. 40Устройство работает следующим образом.При растопке котлоагрегата коммутатор 13 выдает сигнал о включенииустройства, но этот сигнал не проходит на включающее реле блока 4, таккак с датчика 5 сигнал отсутствует,а оба этих сигнала проходят навключающее реле блока 14 через элемент И. Включающее реле блока 14 отключеио, при этом переключатель 9разрывает цепи датчиков 5 и 6, Одновременно с блока 14 поступают команды на блок 15, который изменяет параметры регулятора 2, и на переключатель 10, который подключает к регулятору 3 вспомогательный исполнительный орган 11 (байпасный клапан). При 4достижении определенного расхода пара (например...
Предыдущий патент: Пневматическая система регулирования соотношения расходов
Следующий патент: Самонастраивающаяся система с приводом на муфтах
Случайный патент: Способ укладки стеблей ягодных кустарников и устройство для его осуществления