Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
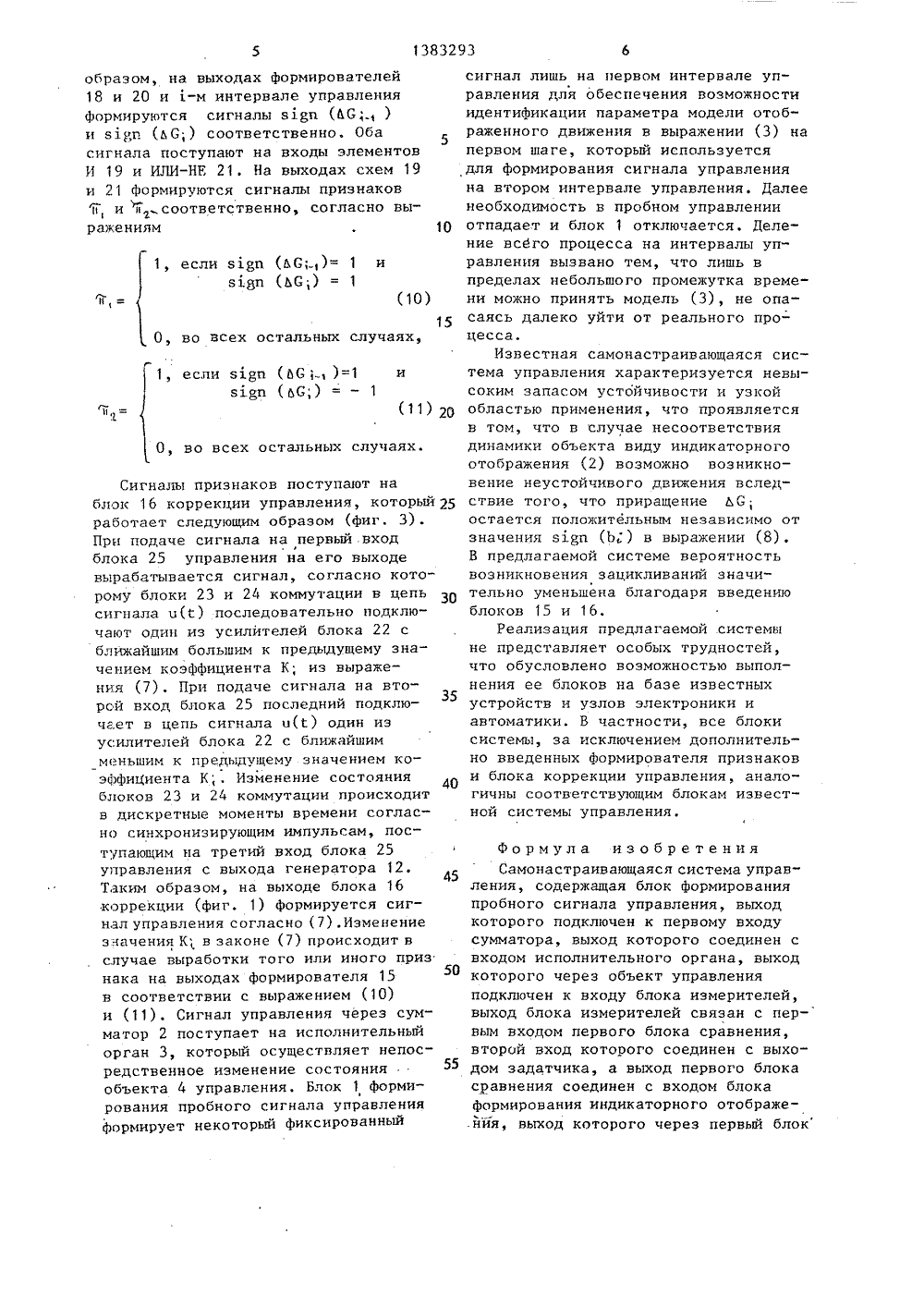
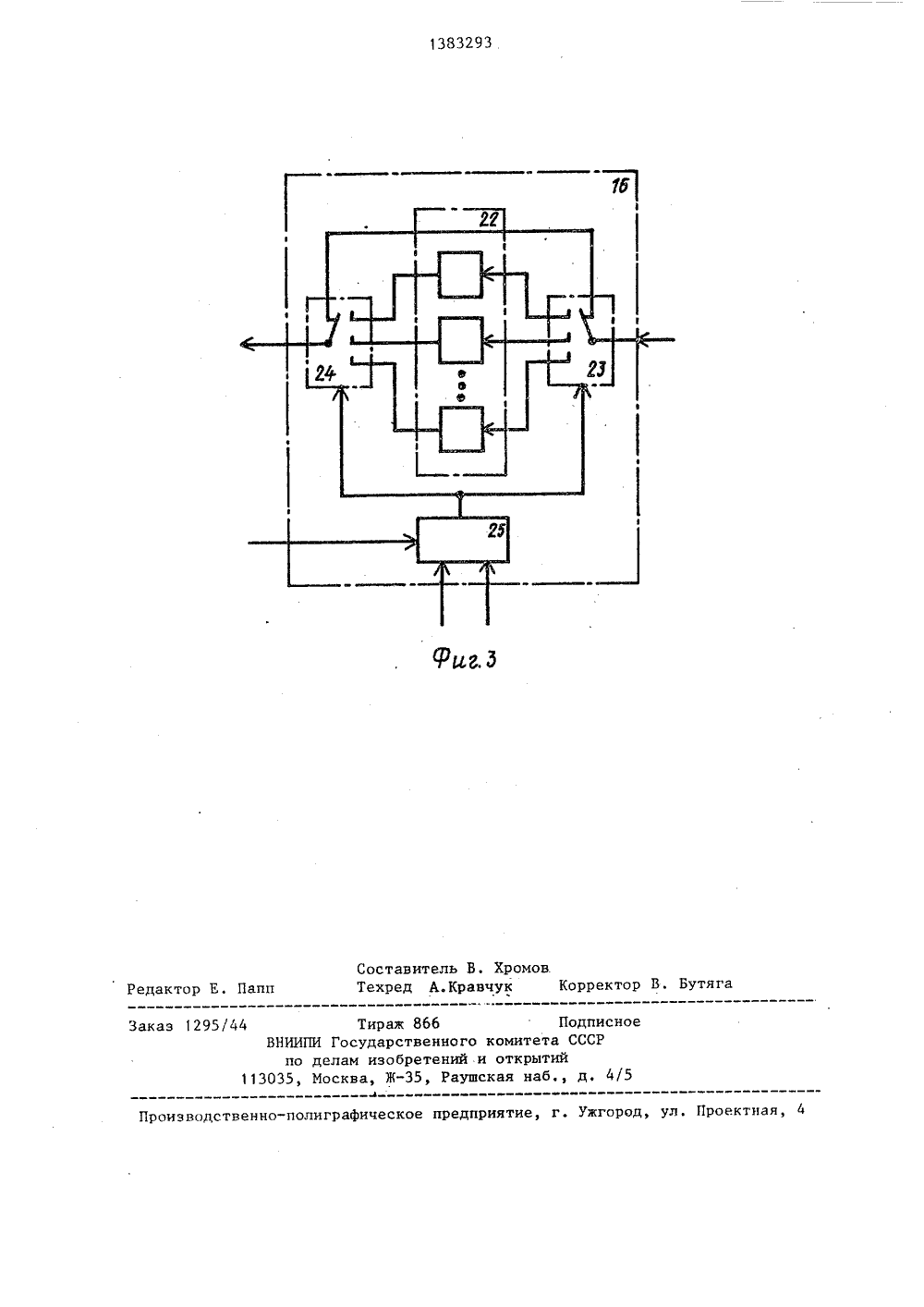
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 19) И 05 В 13 Й. КОМИТЕТ СССРЕТЕНИЙ И ОТКРЫТИЙ ОСУДАРСТВЕН ПО ДЕЛАМ ИЗО 3ГлСАНИЕ ИЗОБРЕТЕН пЦБуцим Я СИСТЕМА втома ситс оже т илнзации сса объе ов с троми к ю ми.пцен зобДВТОРСНОЬЮСВИДЕТЕЛЬСТ(56) Авторское свидетельство ССР 1168897, кл. С 05 В 13/02, 19(57) Изобретение отн тическому управлению использовано для ста равления широкого кл переменными параметр лируемыми возмущения ретения является пов устойчивости системы, Цель достигается тем, что самонастраивающаясясистема, содержащая блок 1 формирования пробного управления, сумматор2, исполнительный орган 3, объект 4управления, блок 5 измерителей, первый блок 6 сравнения, блок 7 формирования индикаторного отображения,первый блок 8 задержки, второй блоксравнения, модель 10 отображенногодвижения, блок 11 формирования закона управления, генератор 2 синхронизирующнх импульсов, датчик 13временного интервала и задатчик 14,дополнительно имеет формирователь 15признаков и блок 16 коррекции управления. 3 ил.Изобретение относится к области автоматического управления и преимущественно может быть использовано для стабилизации и управления конеч 5 ным состоянием широкого класса объектов с переменными параметрами и неконтролируемыми возмущениями.Цель изобретения - повышение запаса устойчивости системы. ОНа фиг, 1 представлена структурная схема предлагаемой системы; на фиг., 2 - внутренняя структура Формирователя признаков; на фиг. 3 - внутренняя структура блока коррекции уп равления.Самонастраивающаяся система управления содержит блок формирования пробного сигнала управления, сумматор 2, исполнительный орган 3, объект 20 4 управления, блок 5. измерителей, первый блок 6 сравнения, блок 7 формирования индикаторного отображения, первый блок 8 задержки, второй блок 9 сравнения, модель 10 отобра женного движения, блок 11 Формирования закона управления, генератор 12 синхронизирующих импульсов, датчик 13 1временного интервала задатчик 14, фор мирователь 15 признаков и блок 16 коррекции управления.Формирователь 15 признаков (фиг. 2) содержит второй блок 17 задержки, первый формирователь 18, элемент И 19 второй Формирователь 20, элемент 35 ИЛИ-НЕ 21, Второй блок 17 задержки, первый формирователь 18 и схема И 19 соединены последовательно. Выход формирователя 20 соединен с первым входом элемента ИЛИ-НЕ 21 и вто рым входом элемента И 19. Выход первого Формирователя 18 соединен с вторым входом элемента ИЛИ-НЕ 21. Первый вход формирователя 15 признаков является одновременно первым 45 входом второго блока 17 задержки и Формирователя 20. Выход элемента И 19 является одновременно первым выходом формирователя 15 признаков. Выход элемента ИЛИ-НЕ 21 является одновременно вторым выходом формирователя 15 признаков.Блок 16 коррекции управления (Фиг. 3) содержит блок 22 1 усилителей, два блока 23 и 24 коммутации и блок 25 управления, Первый и второй входы блока 25 управления яцляются первым и вторым входами всего блока 16 коррекции управления. Выход блока25 управления соединен с первыми входами блока 23 и 24 коммутации. (1+1) выходов блока 23 коммутации соединены с (1 + 1) входами блока 22 усилителей, (1 + 1) выходов которого подсоединены к (1 + 1) входам блока 24 коммутации. Второй вход блока 23 коммутации и выход блока 24 коммутации 1 являются четвертым входом и выходом соответственно всего блока 16 коррекции управления. Третий вход блока 25 управления является третьим входом всего блока 16 коррекции управления.Пусть объект 4 управления описывается векторным дифференциальным уравнением вида где х-и - мерный вектор фазовых координат;ц-ш - мерный вектор управлений.Вид зависимости (1) считаем неизвестным, Пусть требуется найти такой вектор управлений ц, который пере. водит объект управления, описываемый выражением (1), из начальной точки хо в некоторую заданную конечную точку х. Для решения поставленной задачи вводим индикаторное отображение из пространства фазовых координат объекта на вещественную прямую К следующего вида С (х)- с при С" Я% где С (х) = (х-х) А (х-х),Я = сопзс0 А - положительно определеннаяматрица;Т - знак транспонирования.Функция С(х) неотрицательна и имеет единственный минимум на пространстве Фазовых координат объекта, равный 0 и достижимый в Е -окресности точки х. Так как любому управлению ц в силу зависимостй.(1) соответствует некоторая траектория в фазовом пространстве хС, ц(С), то в силу выражения (2) этому же управлению соответствует траектории на прямой КСй, цИ). Пусть это - траектория отображенного движения, описываем дифференциальным уравнением вида(3) где Ъ - скалярный коэффициент, еслидля простоты математическихвыкладок принять ш = 1.Так как значение Я можно выбрать сколь угодно малым, то поставленную задачу можно переформулировать следующим образом: найти управление ц(С),мпереводящее объект иэ С в началомкоординат С = О. Задача легко решается, если известен параметр в модели (3).Разбиваем время процесса на равные 15 интервалы управления длительностью Т(9) который далее поступает на вход блока16 коррекции управления. Работа блока 16 организуется на основе сигналов, поступающих с формирователя 15. Последний работает следующим образом.(фиг. 2). В соответствии с синхронизирующим импульсом, поступающим с генератора 12 на вход блока 17 задержки, в блоке 17 происходит запоминание на время интервала управления разности АС;, поступающей с выхода блока 9. Кроме того, эта разность поступает на вход формирователя 20. , На выходе формирователя 20 формируется значение "1" при положительном сигнале на входе и "0" - при отри - цательном. На 1-м интервале управления с выхода блока 17 на формирователь 18 подается сигнал разности дС;. Формирователь 18 работает так же, как и формирователь 20. Таким(8) К; = сопзО. 50 С"=Ьц, СИ ) = С С=Т, 1.=0, 1,2,Интегрируем уравнение (3) в пре,делах одного интервала 1 Е(1-1)Т, 1 Т, принимая на этом интервале Ъ(1 Т) = сопят, ц(1 Т)= сопя. 25 С, - С";, =: ЬС, = Ь;цТ, (5) где С (Т) = ГдЬ(1 Т)ц(1 Т) = ц1Считая, что на интервале йб(-1)Т, хТ модель (3) достаточно точно описывает реальную траекторию отображенного движения, из равенстве дС; =дС;=Сх)Т ) -Сх(хТ) (6) получаем выражение для параметра40ДС(3) известен.45Закон управления выбираем в виде Для модели движения (3) закон (8) обеспечивает утойчивое отображенное движение в случае соответствия динамики реального объекта управления выбранному виду индикаторного отоб 55 ражения.Самонастраивающаяся система работает следующим образом (фиг. 1),Блок 5 измерителей определяет текущие фазовые координаты объекта 4 и подает их на вход блока 6 сравнения, где они сравниваются с требуемыми конечными значениями, поступающими из задатчика 14, Разность х-х поступает на вход блока 7 формирования, где осуществляется их преобразование согласно выражению (2) в дискретные моменты С = 1 Т, задаваемые импульсами генератора 12, Значение С заносится на хранение на время интервала Т в блок 8 задержкиРи подается на один иэ входов блока 9 сравнения, на другой вход которого подается текущее значение Г,. Благодаря этому на выходе блока 9 формируется разность 60,. Эта разность поступает в модель 10, где совместно с сигналами ц;, Т, поступающими с выходов сумматора 2 и датчика 13 временного интервала соответственно, формируется значение параметра модели в соответствии с (7). Работа модели 10 происходит дискретно по синхронизирующим импульсам, поступающим из генератора 12. На основе сигналов Ги Ь; поступающих с выходов формирователя 7 и модели 10 соответственно на входы блока 11 формирования закона управления, на его выходе в моменты времени, задаваемые импульсами генератора 12 формируется сигнал управления ц; = - С; з 18 п (Ь,), 1383293образом, на выходах формирователей18 и 20 и -м интервале управленияформируются сигналы з 1 дп (ЬС;., )и з 1 яп (ЬС;) соответственно. Обасигнала поступают на входы элементовИ 19 и ИЛИ-НЕ 21. На выходах схем 19и 21 Формируются сигналы признаковТ, исоответственно, согласно выражениям 10 1, если зръ (ЬС;,)= 1 и зьИп (ЬС;) = 1(10) 15О, во всех остальных случаях,1, если з 1 яп (ЬС 1)=1 изь.рч (ЬС;) = - 1(11) 20 О, во всех остальных случаях. Сигналы признаков поступают наблок 16 коррекции управления, который 25работает следующим образом (Фиг, 3)При подаче сигнала на первый входблока 25 управления на его выходевырабатывается сигнал, согласно которому блоки 23 и 24 коммутации в цепьсигнала п(С) последовательно нодключают один из усилителей блока 22 сближайшим большим к предыдущему значением коэффициента К; из выражения (7). При подаче сигнала на вторсй вход блока 25 последний подклю 35ча.ет в цепь сигнала ц(й) один изусилителей блока 22 с ближайшимменьшим к предыдущему значением коэффициента К Изменение состояния 40блоков 23 и 24 коммутации происходитв дискретные моменты времени согласно синхронизирующим импульсам, поступающим на третий вход блока 25управления с выхода генератора 12.Таким образом, на выходе блока 16коррекции (фиг. 1) формируется сигнал управления согласно (7) . Изменениезначения К; в законе (7) происходит вслучае выработки того или иного признака на выходах формирователя 15в соответствии с выражением (10)и (11). Сигнал управления через сумматор 2 поступает на исполнительныйорган 3, который осуществляет непосредственное изменение состоянияобъекта 4 управления. Блок 1 формирования пробного сигнала управления формирует некоторый фиксированный сигнал лишь на первом интервале управления для обеспечения возможностиидентификации параметра модели отображенного движения в выражении (3) напервом шаге, который используетсядля формирования сигнала управленияна втором интервале управления. Далеенеобходимость в пробном управленииотпадает и блок 1 отключается. Деление всего процесса на интервалы управления вызвано тем, что лишь впределах небольшого промежутка времени можно принять модель (3), не опасаясь далеко уйти от реального процесса.Известная самонастраивающаяся система управления характеризуется невысоким запасом устойчивости и узкойобластью применения, что проявляетсяв том, что в случае несоответствиядинамики объекта виду индикаторногоотображения (2) возможно возникновение неустойчивого движения вследствие того, что приращение ЬС;остается положительным независимо отзначения з 18 п (Ь;) в выражении (8).В предлагаемой системе вероятностьвозникновения зацикливаний значительно уменьшена благодаря введениюблоков 15 и 16.Реализация предлагаемой системыне представляет особых трудностей,что обусловлено возможностью выполнения ее блоков на базе известныхустройств и узлов электроники иавтоматики. В частности, все блокисистемы, за исключением дополнительно введенных Формирователя признакови блока коррекции управления, аналогичны соответствующим блокам известной системы управления,Формула изобретенияСамонастраивающаяся система управления, содержащая блок Формирования пробного сигнала управления, выход которого подключен к первому входу сумматора, выход которого соединен с входом исполнительного органа, выход которого через объект управления подключен к входу блока измерителей, выход блока измерителей связан с пер- вым входом первого блока сравнения, второй вход которого соединен с выходом задатчика, а выход первого блока сравнения соединен с входом блока формирования индикаторного отображенйя, выход которого через первый блокзадержки связан с первым входом инепосредственно - с вторым входомвторого блока сравнения, выход второго блока сравнения соединен спервыми. входами модели отображенногодвижения, второй вход которой соеди-.нен с выходом датчика временных интервалов, третий вход - с выходомсумматора, а выход подсоединен к первому входу блока формирователя законауправления, второй выход которого соединен с выходом блока формированияиндикаторного отображения, а такжегенератор синхрониэирующих импульсов,соединенный с вторыми входами блокаформирования индикаторного отображения и первого блока задержки, с третьими входами второго блока задержки иблока формирования закона управления,с четвертым входом модели отображенного движения и первым входом датчикавременных интервалов, о т л и ч аю щ а я с я тем, что, с целью повышения запаса устойчивости и расширения области применения, дополнительновключает формирователь признаков иблок коррекции управления, причемпервый и второй выходы формирователя 10 признаков соединены с первым и вторымвходами блока коррекции управления,третий вход которого соединен с выходом блока формирования законауправления, и четвертый вход - свыходом генератора синхронизирующихимпульсов, а выход - с вторым входомсумматора, первый вход формирователяпризнаков соединен с выходом второгоблока сравнения, а второй вход - с 2 О выходом генератора синхрониэирующихимпульсов.1383293 Составитель В, ХромовТехред А.Кравчук Корректор В. Бутяга Редактор Е. Папп Заказ 1295/44 Тираж 866 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
4101115, 30.07.1986
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
ЕФИМОВ ВЛАДИМИР ВЛАДИМИРОВИЧ, ЕМЕЛЬЯНОВ АНДРЕЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 23.03.1988
Код ссылки
<a href="https://patents.su/6-1383293-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Формирователь импульсов коррекции угла зажигания по сигналам детонации

Номер патента: 1550205
Опубликовано: 15.03.1990
Авторы: Кузьмичев, Лангуев, Макеенко
МПК: F02P 5/14
Метки: детонации, зажигания, импульсов, коррекции, сигналам, угла, формирователь
...сигнал О. Сигнал П поступаетна пятый вход мультиплексора 10 и(с учетом высокого уровня на М-выхс 5де блока 8 идентификации цилиндровпередается на первый выход мультиплексора 10. Этот сигнал сбрасываетсчетчик 15 в нулевое состояние. Кроме того, сигнал поступает на первыйвход шифратора 11, Шифратор 11 формирует на своем информационном входекод, который используется для изменения величины коррекции угза зажигания, По сигналу В детонации шифратор11 Формирует дополнительный код числа, которое в выбранном варианте,шифратора равно двум. Информационныйвыход шифратора 11 является входомпервого операнда Рсумматора 13,Входом второго операнда В сумматора13 является инФормационный выходрегистра , в котором после начальнойустановки находился код из...
Устройство сигнатурной проверки аналого-цифровых преобразователей

Номер патента: 790293
Опубликовано: 23.12.1980
МПК: H03K 13/20
Метки: аналого-цифровых, преобразователей, проверки, сигнатурной
...выполнения каждого аналого-цифрового преобразования, В качестве импульса конца проверки может быть использован импульс переполнения счетчика внешнего калибра, вырабатывающего контрольные аналоговые сигналы, поступающие на вход проверяемого АЦП и изменяющиеся на квант от каждого им-пульса конца преобразования.В режиме проверки АЦП по сигналу З 5 начала проверки, поступающему через одну из входных шин 7 и блок 2 на вход блока 8 управления, последний устанавливает в исходное состояние си:натурный анализатор 1,элемент 3 фиксации кода и блок 4 контроля,а так-ф же устанавливает сигналом на пятом выходе в соответствующее состояние блок 13 переключателей и подключает выход коммутатора 9 к первой входной шине 6.В результате этого вход...
Устройство для отображения знаковой информации
Номер патента: 1037331
Опубликовано: 23.08.1983
МПК: G06F 3/147, G09G 3/28
Метки: знаковой, информации, отображения
...времени, определяемые синхронизирующими импульсами, которые поступают на его входы с второго выхода блока 7 управления, При поступлении кода символа от источника информации через блок 8 сопряжения на вход генератора б знаков блок 7 управления начинает выдавать синхроимпульсы, соответствующие моменту записи информации на ГИП 1. Ге,нератор б знаков поочередно формирует коды точек знака, сопровождаемые пусковым импульсом, который поступает на вход формирователя 5 импульсов записи-стирания. Адресные блоки 2 и 3 по координатам Х и У при поступлении кода очередной точки с выходов генератора б знаков и относительно высоковольтных импульсов управления с выходов формирователя 5 импульсов записи-стирания подают на электроды ГИП 1 соответствующие...
Устройство для сжатия информации

Номер патента: 1056244
Опубликовано: 23.11.1983
Авторы: Демехин, Зарицкий, Хрупало
МПК: G08C 15/00
Метки: информации, сжатия
...входами первого аппроксиматора, вторые выходы - с информационными входами второго аппроксиматоуа, выход первого аппроксиматора соединен с входами нелинейных элементов, выходы которых соединены с входами блока ортогональной нормализации, выходы которого подключены к входам второго аппроксиматора, выход второго аппроксиматора подключен к входу блока регистрации.Кроме того, блок ортогональной нормализации содержит генератор синхроимпульсов формирователь и Г ка налов, каждый 1 с -ый ( =1,2,3уЯ ) канал содеркит ( М - 1) проектор, нормализатор, элемент И и элемент памяти, первый вход которого подключен к одноименному входу блока орто=35 гональной нормализации, выход подключен к первым входам К -1 проекторов, второй вход первого...
Калибратор фазы

Номер патента: 1078353
Опубликовано: 07.03.1984
МПК: G01R 25/04
Метки: калибратор, фазы
...входам формирователя 2 тактовых импульсов, формирователя 3 кодов, блока 4 индикации, опорный 5 и установочный 6 каналы, в каждом из которых включеныпоследовательно соединенные пересчетные блоки 7 и 8 соответственно,цифроаналоговые преобразователи 9и 10, аттенюаторы 11 и 12, амплитудно-импульсные преобразователи 13 и14, фильтры 15 и 16 нижних частот,.выходы фильтров 15 и 16 нижних час-тот являются выходами устройства,к вторым входам амплитудно-импульс-ных преобразователей 13 и 14 подклю-чены выходы элементов 17 и 18 задержки соответственно, входы элементов 17 и 18 задержки подключенык выходам пересчетных блоков 7 и 8соответственно, первые входц пересчетных блоков 7 и 8 подключенык выходу формирователя 2 тактовых импульсов, вторые входы...
Предыдущий патент: Адаптивная система управления для объектов с изменяющимся запаздыванием
Следующий патент: Бинарная система управления объектами с запаздыванием
Случайный патент: Шахтная щелевая печь