G05B 11/01 — электрические
Устройство для нелинейной коррекции регуляторов

Номер патента: 1388823
Опубликовано: 15.04.1988
Авторы: Власов, Клинков, Пуляев
МПК: G05B 11/01
Метки: коррекции, нелинейной, регуляторов
...момент изменения направления воздействия регулятора на исполнительный механизм и выдает об этом факте временно-зависимую информацию,(реле 17 и 18) и независимую (реле 16 и 19).Момент реверсирования цепи регулятора коммутируется так, что испол 5 1 О 15 2 О 25 В дальнейшем наличие на выходе регулятора (не показан) пауз или повторных импульсов "Больше" не изменитсостояния триггеров 5 и 6, а значити реле 16 и 17 и 19. Обмотка реле18 находится под током от моментапоявления первого импульса на клеммах 21 и 22 до момента исчезновениявыходного импульса одновибратора 9,если раньше регулятор не выдаетсигнал "На меньше",Когда регулятор, следуя заданному закону регулирования, выдаст первый импульс "На меньше 1, который будет являться реверсирующим...
Пропорционально-интегрально-дифференциалный регулятор

Номер патента: 1388824
Опубликовано: 15.04.1988
МПК: G05B 11/01
Метки: пропорционально-интегрально-дифференциальный, регулятор
...сигнал подаетсяна дифференциатор 18, с выхода которого сигнал через первый сумматор15 поступает на вход первого усилителя 4, охваченного обратной связьючерез инерционное звено 20. За счетбольшого коэффициента усиления первого усилителя 4 в регуляторе Формируется Форсирующее звено С выхода.форсирующего звена, т,е, с выходапервого усилителя 4 сигнал поступает на первый вход второго сумматора16, на второй и третий входы которо"го одновременно поступают сигналы .с выходов второго и третьего усилителей 6 и 7, Таким образом, сигнална выходе второго сумматора 16 пропорционален входному сигналу регулятора, его первой и второй произ водной. С выхода сумматора 16 сигналподается на вход исполнительного ме-.ханизма 19.Коэффициент усиления усилителя...
Следящий электропривод редукторных механизмов с компенсацией люфта

Номер патента: 1388825
Опубликовано: 15.04.1988
Авторы: Агафонов, Иванов, Кучинский, Шепелев
МПК: G05B 11/01
Метки: компенсацией, люфта, механизмов, редукторных, следящий, электропривод
...поступает на регулятор 7 положения, выходной сигнал которого поступает на первый вход управляемого задатчика 8 интенсивностиПри этом на выходе управляемого задатчика 8 интенсивности появляется линейно из-. меняющийся по времени сигнал, темп нарастания которого определяется состоянием двухпорогового компаратора 4, Выходной сигнал задатчика 8 интенсивности поступает на контур регулирования скорости, состоящий из четвертого элемента 9 сравненияре гулятора 10 скорости, датчика 17 скорости и замкнутого контура регулирования тока, который содержит регулятор 11 тока с элементом сравнения, усилитель 12, двигатель 13 и датчик 55 16 тока. Выходной сигнал регулятора 10 скорости поступает на первый вход . элемента сравнения регулятора 11 то-. ка,...
Способ управления пьезодвигателем

Номер патента: 1397872
Опубликовано: 23.05.1988
Авторы: Краев, Лопатин, Никольский
МПК: G05B 11/01
Метки: пъезодвигателем
...установившемся положении; соответствующем иэ"менению его длины на величину д .Изменяя коэффициент усиления системы управления, можно обеспечитьдругие настройки системы и получатьпереходные процессы позиционированияот апериодических до колебательных,причем в последнем случае частотакслебаний в переходных процессахпри управлении согласно предлагаемомуспособу равна собственной частоте колебаний пьезопривода.Устройство (фиг. 2) для управленияпьезодвигателем содержит блок 1 задания, первый сумматор 2, блок 3 эа"держки, второй сумматор 4, аналогоцифровой преобразователь 5, первыйрегистр 6, третий сумматор 7, цифроаналоговый преобразователь 8, усилитель 9, пьеэодвигатель 10, исполнительный орган 11, датчик 12 положения, второй регистр 13,...
Устройство для управления пьезодвигателем

Номер патента: 1397873
Опубликовано: 23.05.1988
Авторы: Колушов, Краев, Лопатин, Никольский
МПК: G05B 11/01
Метки: пъезодвигателем
...3секцию пьезостолба непосредственно,а на остальные секции - через согласующие сумматоры 6, Сигнал с выходафорсирующего звена 4 усиливаетсявторым усилителем 5, с выхода которого управляющее напряжение поступаетна первые входы (Н) согласующихсумматоров Ь. Согласующие сумматора6 суммируют управляющие напряженияс выходов первого и второго усилителей.Таким обра:ом, на каждой из секцийпьезостолба формируются различныенапряжения, определяемые входным сигналом устройства, параметрами форсирующего звена 4 и коэффициентамисуммирования по первым входам Ксогласующих сумматоров 6,1 ри разбиении пьезостолба на 11одинаковых секций и выборе К; и соответствии с выражениемЕ = 22+К1 1 ф 1где 2 - индекс секции (1 (с 11-1),возрастающий от 2 = 1...
Система управления технологическим процессом

Номер патента: 1403014
Опубликовано: 15.06.1988
Авторы: Баулин, Курсаков, Туренко
МПК: G05B 11/01
Метки: процессом, технологическим
...и Фактической интенсивности и регулятор 5 поддерживает интенсивность на заданном уровне. При увеличении управляющего воздействия на объект 6 регулирования (например, интенсивности дутья в камере сгорания) технический процесс интенсифицируется, что приводит к изменению регулируемого параметра или его производной. При этом для ряда процессов характерным является нали- чие периодического внешнего воздейстлогического блока 15, на первый вход которого подается сигнал третьей производной с выхода третьего дифференциатора 13. Во втором логическом блоке 15 сравниваются знаки выходного сигнала сумматора 16 и сигнала, соответствующего третьей производной, с выхода третьего дифференциатора 13. В случае их совпадения сигнал на выходе второго...
Электрогидравлическая следящая система

Номер патента: 1405024
Опубликовано: 23.06.1988
МПК: G05B 11/01
Метки: следящая, электрогидравлическая
...частот и амплитудногодетектора 7 с усреднением, так чтона его выходе образуется медленноменяющееся напряжение П , пропорциональное зависимости скоростной характеристики гидродвигателя 3 от температуры рабочей жидкости. Опорные нап 1 1 3ряжения Б,4, Ц, , Б, поступают свыходов источника 14 напряжения наопорные входы компараторов 9 - 11 ипри отсутствии сигнала Б удерживаюткомпаратора 9 - 11 в положении, когда на их выходах сигналы 11, Б,оонотсутствуют. Следовательно, коэффициент передачи суммирующего усилителя8 остается неизменным и равным своему номинальному значению. При разогре"ве рабочей жидкости появляется напряжение Б, свидетельствующее об изменении характеристик следящей системы, которое поступает на сигнальныевходы компараторов...
Многоканальная автоматическая система регулирования

Номер патента: 1406564
Опубликовано: 30.06.1988
Автор: Яковлев
МПК: G05B 11/01
Метки: автоматическая, многоканальная
...с тремя входными клеммами исполнительного механизма (точнее его усилители мощности). При подаче сигнала с выхода переключателя 7 и 12 на одну пару клемм ИИ (среднюю и одну крайнюю) механизм вращается в одном направлении, а при подаче сигнала на другую пару клемм - в противоположном направлении, При срабатывании перв/И переключатель 7 пропускает йа свои выходные клеммы сигнал с выхода регулирующего блока 6. Это происходит при наличии на втором или третьем входе переключателя 7 сигнала равного "1".При работе в обычном режиме, когда одно из отклонений й Х максимально, но меньше ЬХогр вьщелитель 3 максимального сигнала вьщеляет максимальное по модулю отклонение,. которое поступает на вход релейного регулирующего блока 6, а с его...
Следящий электропривод с переменным моментом инерции

Номер патента: 1406565
Опубликовано: 30.06.1988
Авторы: Бузанева, Довгань, Иваненко, Казачковский, Клисенко, Крюков, Мусиенко
МПК: G05B 11/01, G05B 13/02
Метки: инерции, моментом, переменным, следящий, электропривод
...переменным моментом инерции имеет следующий вид:Умножив и разделив второе слагаемоев правой части уравнения движения наЙг. и учитывая, что Йц/дг =о, получаем уравнение движения в следующемвиде: йы а а 1 (Ч)М-М (с) = 1 (Ю)- -- +с 7. с 1 г 2 дГ Из этого уравнения следует, что М-М (с)-1 (ц) 1.с 1 ( Ч) 2 ас 1 Еый шгБь.оз ф где ш г- масса звена;- расстояние от оси вращениядо центра масс;- ускорение свободного падения;1 - КПД и передаточное отношение передачи;ч - . угол поворота звена - сигнал датчика 10 положения,На третий вход сумматора 12 поступает сигнал с выхода второго блока16 умножения, на входы которого подаются сигналы с выхода интегратора14, и с выхода блока 15 определенияпроизводной, сигнал на входе которого пропорционален скорости...
Система автоматического управления

Номер патента: 1409964
Опубликовано: 15.07.1988
Автор: Братус
МПК: G05B 11/01
...добавки) превосходит величину зоны нечувствительности элемента 46 с зоной нечувствительности (фиг.4), то на его выходе появляется дополнительный сигнал, преобразование которого форсирующим звеном 26 (фиг.2) приводит к формированию дополнительного управляющего сигнала, поступающего через суммирующий элемент 32 на третий вход элемента 10 сравнения (фиг.1).40 Реализация указанного управляющего сигнала вызывает процесс дополнительного снижения скорости электродвигателя 1.и, как следствие, уменьшение 4 В величины момента сил упругости (а также и динамической добавки). В том случае, когда величина динамической добавки амплитуды высокочастотной составляющей моментов.сил упругости на 50 ходится в области зоны нечувствитель-. ности элемента 46 с...
Устройство управления реверсивным электродвигателем постоянного тока

Номер патента: 1409965
Опубликовано: 15.07.1988
Автор: Кийло
МПК: G05B 11/01
Метки: постоянного, реверсивным, электродвигателем
...23, включенного междувыходом корректирующего звена и клем-,.мой "Корпус" схемы, и резистора 19корректирующего звена.Устройство работает следующим образом,При расстройке вариометра датчика 8 фазы тока и напряжения в цепи;выходной трансформатор - вариометр -антенна 22, расходятся в ту или инуюсторону, что регистрируется фазовымдетектором 1, и на его выходе появляется напряжение постоянного тока соответствующей полярности, снимаемоес движка пеперемнного резистора 17.Через элемент 2 и усилитель 3 вовремя разрешающего сигнала, поступающего на второй вход усилителя 3,включается двигатель 4, который настраивает вариометр на резонансноезначение тока в антенне 22. В этотмомент (область нуль-эоны на фиг.За,бэлемент 2 и усилитель 3 переходят...
Устройство для компенсации запаздываний

Номер патента: 1409966
Опубликовано: 15.07.1988
Авторы: Авдеев, Купчик, Марьясов, Мышляев, Нагайцев, Сарапулов, Соловьев, Столяр
МПК: G05B 11/01
Метки: запаздываний, компенсации
...объекта сигнала об ошибке экстраполяции регулирующего воздействия цГДля реализации описанного алгоритма функционирования устройства для компенсации запаздываний входной сигнал О устройства экстраполируетсяРна время запаздыванияв экстраполяторе 17 и подается на вход второго блока 16 сравнения, где алгебраически суммируется с выходным сигналом второго сумматора 13 и входным сигналом исполнительного блока 2. Во втором сумматоре 13 происходит суммирование сигналов, поступающих на его первый и второй входы. На первый вход второго сумматора 13 поступает выходной сигнал второго. блока 16 сравнения, умноженный в первом масштабирующем блоке 12 на коэффициент 1 с. На второй вход третьего сумматора подается выходной сигнал второго блока 16...
Система автоматического управления нестационарным объектом

Номер патента: 1409967
Опубликовано: 15.07.1988
МПК: G05B 11/01
Метки: нестационарным, объектом
...гараметрами и на вход четвертого корректирующего устройства 9. С выхода объекта 7 уп. - равления сигнал Х 6, поступает на второе корректирующее устройство 10 и на элемент 1 сравнения. С блока 11 датчиков информация поступает на 40 блох 12 вычисления параметров, где она обрабатывается, и вырабатывается новая информация в виде сигналов С 1 и С 1, с помощью которых происходит перестройка параметров корректирующего 45 устройства 4.Пусть объект 7 управления имеет передаточную функцию АС А 5 ВС(Я) Б+ВС 1 Б + Вбо На основании изложенного выбира- ем следующие передаточные функции блоков 2,4,5,8-10 основного контура: 10 т Ак, Ам 1 11 (Я а БС(Я) Б(Я 2+С,Б+С ) ф,и (Я)Я 2+Ь,Б+ Ь ф 2И (Б): 3 в31 Б +1 Б + ГС(Я) 50 Чрр,(,Б,гр (ЯЧ с(Я)1 (Б,)...
Следящий электропривод

Номер патента: 1409968
Опубликовано: 15.07.1988
Авторы: Боровин, Евневич, Слепцов
МПК: G05B 11/01
Метки: следящий, электропривод
...огра 0ничения величины тока и улучшение динамических характеристик электропривода,На чертеже представлена структур"ная схема следящего электропривода,Электропривод содержит алгебраическийсумматор 1, регулятор 2 скорости,первый ограничитель 3 уровня сигнала,сумматор 4, усилитель 5 мощности,двигатель 6 постоянного тока, датчик7 скорости, первое. звено 8 с, зонойнечувствительности, первое корректирующее устройство 9, второй ограничитель 10 уровня сигнала, второе звено11 с зоной нечувствительности и второе корректирующее устройстно 12.Следящий электропривод работаетследующим образом.Сигнал задания скорости поступаетна первый вход алгебраического сумма- З 0тора 1, на второй вход которого поступает сигнал с датчика 7...
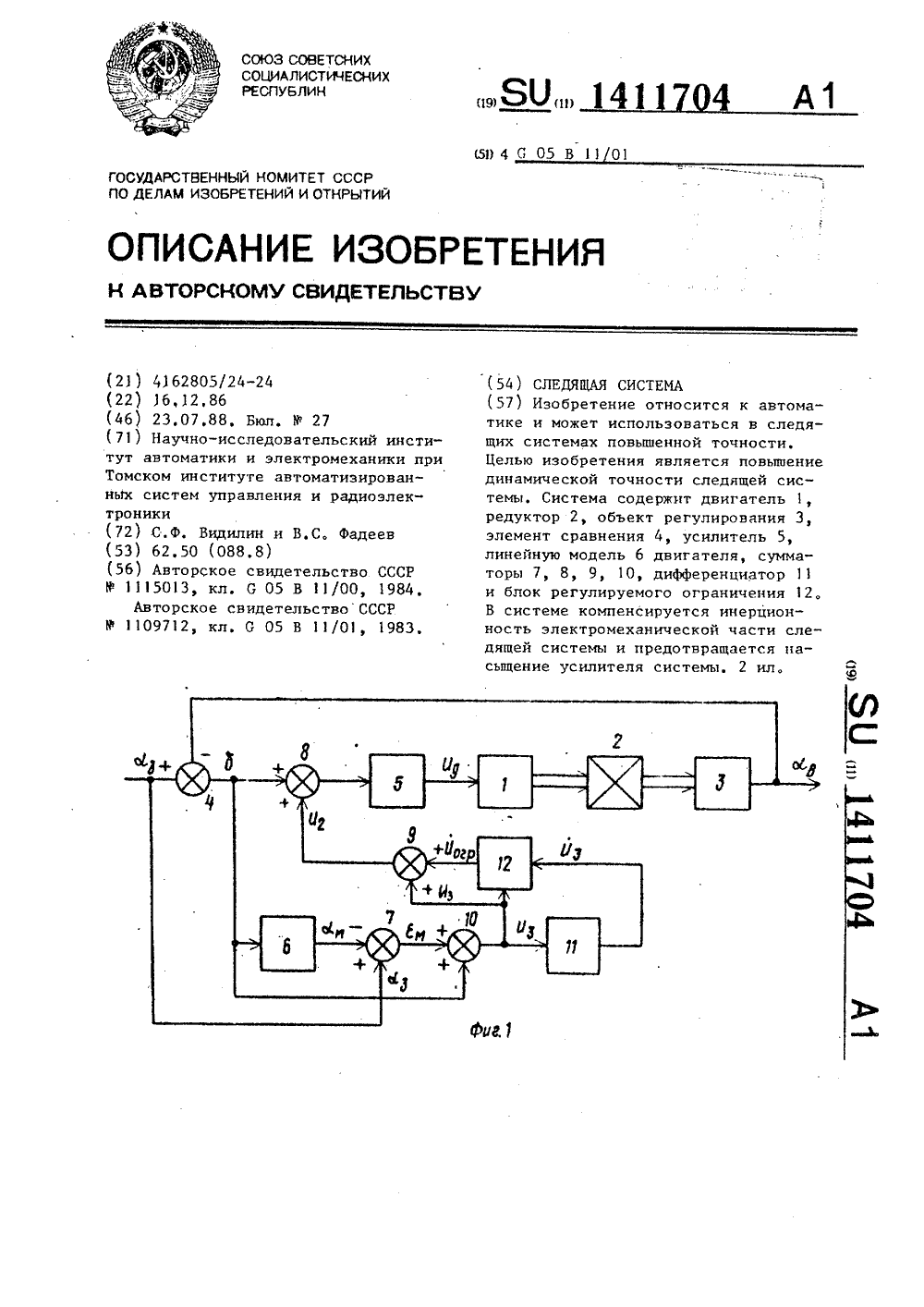
Следящая система
Номер патента: 1411704
Опубликовано: 23.07.1988
МПК: G05B 11/01
Метки: следящая
...П уровень ограничеЬ ния увеличивается, для того чтобы двигатель быстрее отрабатывал возмущающие воздействия. После отработки сигнал П уменьшается При уменьшении величины сигнала Уз уровень ограничения блока 12 также уменьшается, чтобы не насьщался усилитель 5 (фиг.2).55Перенесение второго сумматора 8 на вход усилителя 5 упрощает систему ввиду того, что цеп усилитель-двигатель в следящих системах являетсясиловой цепью, т,е. в ней имеютсябольшие напряжения и протекают большие токи по сравнению с другими блоками и цепями следящей системы,Следящая система работает следующим образом.При появлении входного сигналасистемы о( на выходе элемента 4 сравнения появляется сигнал Г, который,пройдя через второй сумматор 8, усиливается усилителем 5...
Следящая система

Номер патента: 1413596
Опубликовано: 30.07.1988
Авторы: Бондарев, Самедов, Червяков
МПК: G05B 11/01
Метки: следящая
...не вызоветперерегулирования, выходящего за пределы этой зоны,При малых, меньших Е, значенияхсигнала рассогласования выходные сиг"налы первого и второго пороговых блоков 8 и 9 равны нулю и соответствен"но на первом и втором входах суммирующе-корректирующего усилителя 13сигналы отсутствуют. При этом благо"даря сигналу смещения (не указан) навыходе корректирующего усилителя 13имеется сигнал, соответствующий значению К = 1 и напряжению обратнойсвязи Б = БЭ . Когда сигнал рассогласования увеличивается вследствиеизменения задающего воздействия илинагрузки двигателя 4 и его модульнаходится в пределах Ес/Я/сд,навыходе первого 8 порогового устройст"ва появляетсясигнал Я( -;, который усиливается инвертирующим усили"телем 11 и поступает на...
Сервопривод

Номер патента: 1416933
Опубликовано: 15.08.1988
Авторы: Ковалев, Сафонов, Смирнов
МПК: G05B 11/01
Метки: сервопривод
...разрывая цепь питания обмотки 87 третьего реле. Замыкающие контакты 88 размыкаются, а16933 6 5 14размыкающие контакты 89 замыкаются,и через замкнутые размыкающие контакты 89 напряжение может быть подано спомощью третьего переключателя 33на любую из обмоток 8 или 9 первогоякоря 5 " число оборотов двигателяможет быть как повышено, так и понижено. Третий вывод 32 первого переключателя 29 обесточивается, втораясигнальная лампа 26, разрешающаявключение сцепления, гаснет, а перваясигнальная лампа 23, указывающая,что сцепление включено, продолжаетгореть, получая питание через первыераэмыкающие контакты 50 первого релеи замыкающие контакты 52 второго реле. При этом первый диод 53 препятствует подаче напряжения на второйвывод 28 второй...
Регулятор подвижности бетонной смеси

Номер патента: 1418057
Опубликовано: 23.08.1988
Авторы: Васильков, Горенко, Савицкий, Шмелев, Яковис
МПК: B28C 7/00, G05B 11/01
Метки: бетонной, подвижности, регулятор, смеси
...8 умножения, где он умножается на некоторый коэффициент пропорциональности К, характеризующий влияние массы смеси на величину тока двигателя бетоносмесителя, на третий вход сумматора 6. Вы бор коэффициента пропорциональности К (как и градуировка задатчика подвижности) производится известными методами на основе экспериментальных данных, В сумматоре 6 сигналы от запоминающего устройства 5, задатчика 7 подвижности и блока 8 умножения складываются и резуль. гирующий сигнал подается на второй вход нуль-органа 4.Управляющий импульс с формирователя 21 синхронизатора 12, включающий запоминающее устройство 5, одновременно поступает и на первый вход триггера 13. При этом триггер устанавливается в нулевое состояние и отключает нуль-орган 4. После...
Устройство дистанционного управления

Номер патента: 1418647
Опубликовано: 23.08.1988
Авторы: Корабицын, Оловенцова
МПК: G05B 11/01
Метки: дистанционного
...несколько большее, чем время, необходимое объекту для исполнения команды управления,Объект, получив команду управления на открытие, начинает перемещаться и сходит: с концевого выключателя Закры то" 3, контакт которого размыкается, При этом обмотка 7 управления второго .рЕле обесточивается и его разомкнутый контакт 33 замыкается. Одновременно третье реле, на обмотку 8 управления 30 которого подано напряжение, своим размыкающимся контактом 14 разрывает .цепь подачи напряжения. на обмотку 9 управления четвертого (отключающего) реле, так как разрывает цепь команды управления на закрытие этого репе, а замыкающимся контактом 16 подает на-. пряжение на первую обмотку 1 О управления пятого поляризованного реле, которое срабатывает по первой...
Адаптивная система управления потенциально опасным объектом

Номер патента: 1423977
Опубликовано: 15.09.1988
Авторы: Левинский, Редунов, Хобин
МПК: G05B 11/01
Метки: адаптивная, объектом, опасным, потенциально
...зависимостьХ при Х -Х )О,Х1Х при Х-Х О,Изменение интенсивнос(14)о Сигнал Х (г.) с выхода измерителя 14 рассогласования возводится в квад ти, спектрального состава неконтролируемыхвнешних возмущений ц и параметровобъекта 3 управления во времени вызыРвают изменения статистических характеристик случайного процесса Х(Т),что требует и соответствующей настройки порогового заданного значенияХ , по (8, 9),Реализацию этих зависимостей выполняют блок 18 оценки статистическихпараметров регулируемой величины,блок 19 оценки статистических параметров случайной и периодичегкой составляющих, блок 57, блок 42 коррекции порогового заданного значения иизмеритель 62 рассогласования.Блок 18 на скользящем интервалевремени Г оценивает статистическиепараметры...
Следящая система

Номер патента: 1425595
Опубликовано: 23.09.1988
Авторы: Матюхина, Михалев, Паромчик
МПК: G05B 11/01
Метки: следящая
...должна удовлетворять условиюсуществования скользящего режима всистемах с переменной структурой С учетом уравнений динамики предлагаемой следящей системы:, =хйе фсй К 1КККча=Т Т Т е)- = -а - -х - -е-е - (К х+(УО вРпБ коэффициент передачи интег"ратора 11,при всрп у 1 вдрпБ;О при вдрк у вдрпБ,коэффициент усиления первого усилителя 2,электромеханическая постоянная времени БЛПТ 5, 1425595К - коэффициент передачиК - коэффициент передачи редуктора Зв 5К - коэффициент передачи отвыхода усилителя 2 до выхода выпрямителя 9а " скорость линейной заводки6;=ае. 1 ОИз формулы (2) путем дифференцирования получают КчТк Тк . ККЛКБ а а + (1 -- )х - " -15"(К х + 1 у)зз.рпБ. - (5) Так как при Б - "О, Тх = -х, то из формулы (5) следует 20 Юз" - Т а - А-...
Регулятор

Номер патента: 1425596
Опубликовано: 23.09.1988
МПК: G05B 11/01
Метки: регулятор
...задерж-ки поступает на дифференциатор 8,15который вырабатывает импульс сбросасЧв, по переднему фронту сигнала о3Импульс, вырабатываемый дифференциатором 8 по заднему фронту входногосигнала, не приводит к сбросу интегратора 4 со сбросом,ШИМ 6 вырабатывает прямоугольныеимпульсы Я м постоянной амплитуды,длительностью Ь 1 с периодом повторения Т. Период повторения определяется частотой синхронизирующих им 1пульсов Т = - . Полярность наи у фвыходе ШИМ 6 совпадает с полярностью сигнала на его входе.чайфДлительность импульса Ь 1 линейнозависит от значения входного сигналав соответствующие дискретные моментывременигде Р(с ) - значение сигнала на входе ШИМ 6 в момент времени С. 40Исполнительный механизм 7, вход которого подключен к выходу ШИМ 6,...
Двухканальная следящая система с разделенной нагрузкой

Номер патента: 1425597
Опубликовано: 23.09.1988
Авторы: Кузнецов, Прокопенко
МПК: G05B 11/01
Метки: двухканальная, нагрузкой, разделенной, следящая
...р+с р 2+с,р+где с целью обеспечения астатизма второго порядка по управляющему воздействию принимается сЬ и с,:ЬАналогичным образом Формируется динамика и второго канала.Таким образом, в двухканальной системе могут быть реализованы оптимальные операторы каналов, что нозво" ляет существенно уменьшить дисперсию ошибки следящей системы при случайных входных сигналах,Формула и з о б р е т е н и я Двухканальная следящая система с разделенной нагрузкой, содержащая первый чувствительный элемент, пер" вый вход которого является первым входом системы, первый усилитель сигнала ошибки, входом соединенный с выходом первого чувствительного эле- мента, первый усилитель мощности, первый исполнительный двигатель, входом соединенньщ с выходом первого...
Силовой следящий привод

Номер патента: 1425598
Опубликовано: 23.09.1988
МПК: G05B 11/01
Метки: привод, силовой, следящий
...начальное угловое положение нагрузки. Сигнал Б с выходайг 5 алгебраического сумматора 16 может быть представлен: 1 О где , - входной сигнал в виде цифрового двоичного кода;М, - сигнал с датчика 10 положения в виде цифрового двоичного кода объекта 9 управления;К, К- коэФФициенты преобразованияцифроаналоговых преобразователей 3 и 4.При К,=КЧ, П =Кц, о 120Сигнал У . запоминается на блокег19 памяти при срабатывании анализатора 18 ошибки, которое происходит при отработке больших рассогласоваоний, превышающих 2, и при срабатыва нии второго (точного) релейного анализатора 13 скорости, которое происходит при скорости объекта 9 управления 1,5-2,0 о/с.При нулевом значении сигнала с цифрового датчика 1 О положения, т,е. о, = О, блок 19...
Следящая система

Номер патента: 1427327
Опубликовано: 30.09.1988
Авторы: Баранов, Гостев, Кобяков
МПК: G05B 11/01
Метки: следящая
...импульеую тактового генератора 10 подаются Иа вход счетного триггера 13, который осуществляет своими импульсами на прямом и инверсном выходе коммутацию ключей 17 и 19 по управляющим входам, формируя тем самым первый и второй интервалы управления соответственно, причем импульс с прямого выхода в первом интервале управления включает ключ 17, а во втором интервале выключает его, импульс с инверсного выхода в первом интервале управления выключает ключ 19, а во втором интервале - включает его. Выходные импульсы тактового генератора 10 поступают также на вход второго формирователя импульсов 14, иа выходе которого формируются короткие импульсы, первый из которых служит для стробирования сигнала ошибки при подаче его на управляющий вход...
Многофункциональный регулятор

Номер патента: 1432455
Опубликовано: 23.10.1988
Авторы: Какузин, Крысенко, Майстренко, Щербинин
МПК: G05B 11/01
Метки: многофункциональный, регулятор
...сигнал с выхода делителя 9. С выхода сумматора 8 сигнал подается на вход выпрямителя 4,С выхода выпрямителя 4 сигнал поступает на вход нелинейного блока 1 1типа "насыщение", с выхода которогона второй вход усилителя 1 О с переменным коэффициентом усиления, на первый вход которого поступает сигналс сумматора 5. Выход усилителя 10 спеременным коэффициентом усиления подсоединен на вход сумматора 6, выходкоторого подключен на вход усилителя12, охваченного инерционным звеном13 по закону отрицательной обратнойсвязи. Выход усилителя 12 соединенс входом исполнительного механизма 14.При первоначальном подключениирегулятора к объему усилителя 10 спеременным коэффициентом усиления устанавливается малый коэффициент усиления, что способствует...
Регулятор с переменной структурой

Номер патента: 1434401
Опубликовано: 30.10.1988
Авторы: Дедухно, Ипполитов, Подорин
МПК: G05B 11/01
Метки: переменной, регулятор, структурой
...к выходу четвертого блока О переключения, на котором будет сихнал Х.Таким образом произойдет быстрое перемещение исполнительного устройства16 в новое положение, которое обеспечит компенсацию поступившего возмущения. При уменьшении рассогласованияпоступит на вход интегрирующего 13 и пропорционального 12 звеБьев 1 выходной сигнал пропорционального звена 12 поступит на вход исполнительного устройства 16, а выходнойсигнал второго блока 8 переключенияне будет поступать на второй информационный вход интегрирующего звена13, В дальнейшем компенсация поступившего возмущения будет осуществляться пропорциональным 12 и интегрирующим 13 звеньями,При поступлении значительного возмущения в канале внешнего командногосигнала сФормируется сигнал Р=...
Следящая система

Номер патента: 1439529
Опубликовано: 23.11.1988
Авторы: Степанов, Сударикова, Чернов
МПК: G05B 11/01
Метки: следящая
...- .с его сигнальной обмотки - поступа ет на второй вход кпюча 12 и при отсутствии управляющего сигнала от компаратора 9 на входе этого ключа проходит без изменений через ключ 12 на второй вход сумматора 2.Рассмотрим работу предлагаемойследящей системы в режиме с отказав 1439529шим двигателем. При отказе двигателя5 на выходе, измерителя 1 рассогласования присутствует длительный постоянный сигнал рассогласования значительной величины. Этот сигнал, беспрепятственно пройдя через .фильтр 8,поступает на компаратор 9, которыйсрабатывает и подает управляющие сигналы на второй вход усилителя 3 с переменным коэффициентом усиления и напервые управляющие входы коммутаторов10 и 11 и ключа 12. При этом дальнейшая работа следящей системы происходит...
Цифровая следящая система

Номер патента: 1441348
Опубликовано: 30.11.1988
Автор: Аверков
МПК: G05B 11/01
...не превышает 2", тоиспользуются пониженные скоростиотработки рассогласования, которье 50определяются задатчиком 7, при превьппении модуля рассогласования 2 " -максимальная скорость отработки.С целью упрощения схемы устройства возможно использование не всехМ младших разрядов Б-разрядного чис"ла, а только 1, старших разрядовМ-разрядного числа,Если модуль рассогласования превышает 2 , то блок 5 не оказывает влияния на работу системы, так как ключ 10 закрыт и сигнал на блок 11 регулирования скорости не проходит. Отработка рассогласования производится с максимальной скоростью. Направление отработки определяется сигналами "Больше" и "Меныпе", поступающими из схемы 6 сравнения на входы исполнительного блока 9.Если модуль...
Двухконтурная многоканальная система регулирования

Номер патента: 1441349
Опубликовано: 30.11.1988
Автор: Яковлев
МПК: G05B 11/01
Метки: двухконтурная, многоканальная
...Ес 20 ли бы не быпо ограничения отклонений зХ "., то системя все времяработала бы ат второго выхода объекта 2 регулирования, так как сигналыК имеют приоритет. Б то же времяприоритет необходим, так как сигналыХ при воздействии внешних возмущений изменяются быстрее, чем сигналыХ; на первом выходе, что означаетболее раннее обнаружение тенденции30 изменения главной регулируемой величины - сигнала на первом выходеобъекта 2 регулирования, Регулирование сигнала Х" является средством для более качественного регуЗ 5 лирования Х/,1 ля пояснения работы системы рассмотрим следующие типичные ситуации.1. Система работает в невоэму щаемом режиме/Отклонения Х; параметров Х, свторого выхода объектов 2 регулирования от их заданных значений Х,дневелики (Х,...