Видилин
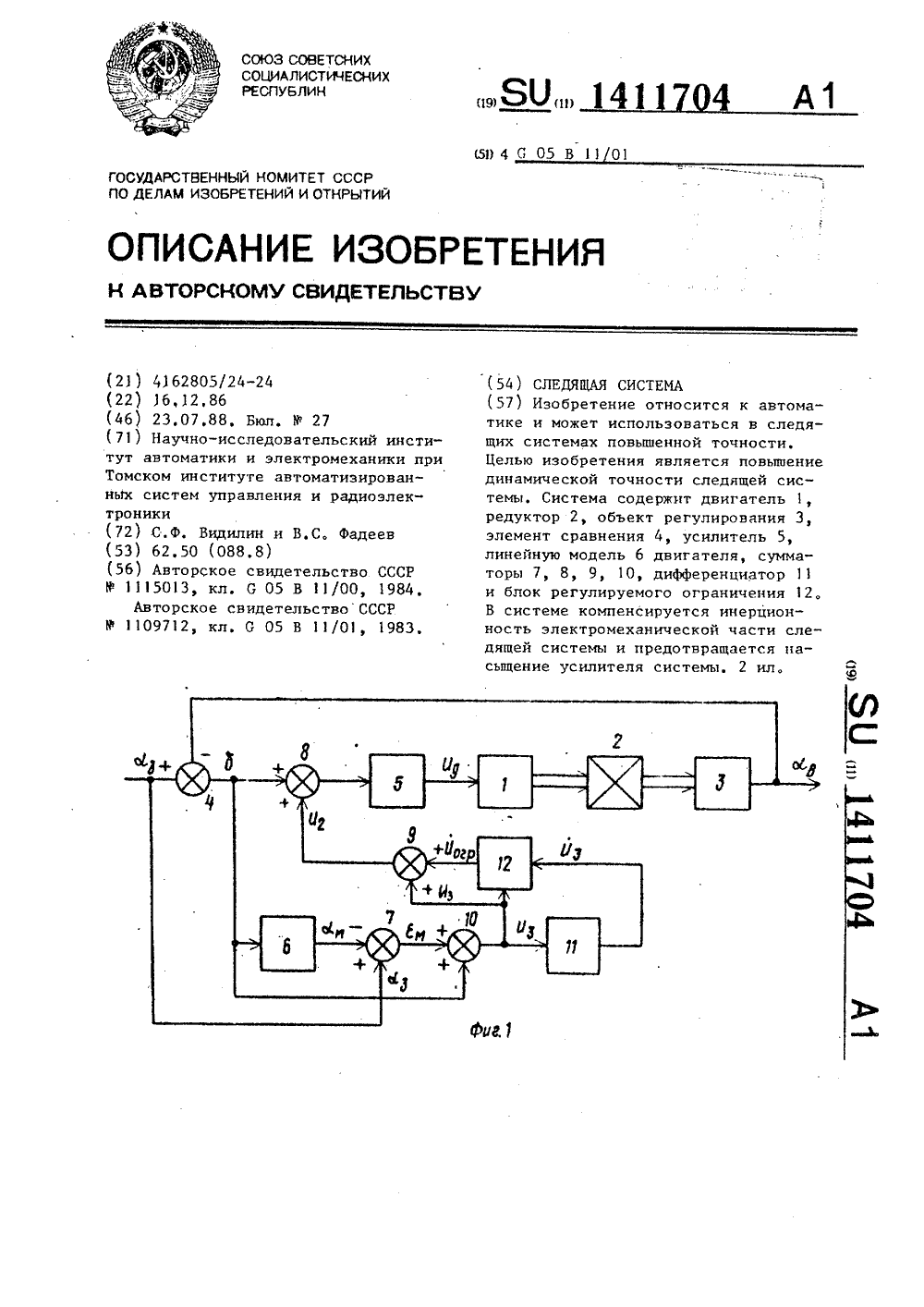
Следящая система
Номер патента: 1411704
Опубликовано: 23.07.1988
Авторы: Видилин, Фадеев
МПК: G05B 11/01
Метки: следящая
...П уровень ограничеЬ ния увеличивается, для того чтобы двигатель быстрее отрабатывал возмущающие воздействия. После отработки сигнал П уменьшается При уменьшении величины сигнала Уз уровень ограничения блока 12 также уменьшается, чтобы не насьщался усилитель 5 (фиг.2).55Перенесение второго сумматора 8 на вход усилителя 5 упрощает систему ввиду того, что цеп усилитель-двигатель в следящих системах являетсясиловой цепью, т,е. в ней имеютсябольшие напряжения и протекают большие токи по сравнению с другими блоками и цепями следящей системы,Следящая система работает следующим образом.При появлении входного сигналасистемы о( на выходе элемента 4 сравнения появляется сигнал Г, который,пройдя через второй сумматор 8, усиливается усилителем 5...
Устройство формирования управляющего сигнала следящего привода
Номер патента: 1348768
Опубликовано: 30.10.1987
Авторы: Видилин, Фадеев
МПК: G05B 11/00
Метки: привода, сигнала, следящего, управляющего, формирования
...процесса (9). 25 30 35 40 45 С выхода блока 1 на вход блока 2 и на сумматор 7 поступает сигнал, равный произведению Я С, с выхода блока 2 на сумматор 7 поступает сигнал, равный произведению (6 Е) С= Я ; с выхода блока 3 на сум 2.матор 7 поступает сигнал й й. С выхода блока 4 на сумматоры 7 и 8 поступает сигнал, равный Гдс -Я(ос выхода блока, 5 на пает сигнал, равный Я(е - с,) + й(с-е,) . Все сигналы, поступающие на сумматор 7, сгруппированы таким образом, что сигналы, которые должны складываться согласно основным аналитическим выражениям, подаются на прямой вход (+) усилителя 6, а сигналы, которые должны вычитаться, подаются на инверсный вход (-) усилителя 6После выведения нагрузки следящего привода в точку с заданными фазовыми...
Комбинированная следящая система с люфтом

Номер патента: 1318989
Опубликовано: 23.06.1987
Автор: Видилин
МПК: G05B 11/01
Метки: комбинированная, люфтом, следящая
...блока 8 скоростной обратной связи и сигнала с выхода первого дифференциатора 9, вводимого 35для компенсации динамической ошибкиследящей системы. Полученный управляющий сигнал с выхода первого сумматора 3 через второй усилитель 4подается на вход исполнительногодвигателя 5. Редуктор 6 приводитсяв движение исполнительным двигателем 5. Уменьшение ошибки от люфтапроисходит следующим образом. С помощью интегратора 10 и второго сумматора 11 измеряется текущая величина люфта, и сигнал, пропорциональный этой величине, формируется навыходе второго 11 сумматора. С помощью дифференциатора 12 определяется . 50величина, пропорциональная скоростиизменения люфта и поступает на информационный вход регулируемого ограничителя 13, где ограничиваетсяпо...