G05B 11/01 — электрические
Регулятор скорости вращения двигателя постоянного тока

Номер патента: 1644085
Опубликовано: 23.04.1991
Авторы: Караваев, Рыжков, Шахмейстер
МПК: G05B 11/01
Метки: вращения, двигателя, постоянного, регулятор, скорости
...задающего генератора 1;1 - емкость счетчика 2;Т - период (текущий) импульсов,поступающих по шине 8 отДС.В этом случае на выходе Б счетчика 2 появляется импульс (см,фиг.2 г),1который осуществляет переключение всостояние логическая 1 триггеров 403 и 4 по Я-входам (см.фиг,2 д,е). Сигнал с выхода триггера 4 по выходнойшине 9 осуществляет подключение источника питания к двигателю. Импульсс выхода формирователя 5 импульсовпереключает триггер 3 в исходное состояние, а также сбрасывает счетчик 2.Таким образом, при ТТ (И),т.екогда частота (скорость) вращения двигателя меньше заданной, навыходной шине 9 регулятора имеетсялогическая единица, которая подключает источник питания к двигателю,темсамым заставляя наращивать скоростьвращения, Причем...
Следящая система

Номер патента: 1645938
Опубликовано: 30.04.1991
Авторы: Леонтьев, Пастушенко, Подпоркин
МПК: G05B 11/01
Метки: следящая
...мощный сигнал для регулирования скорости исполнительного двигателя 4, который через редуктор 5 поворачивает объект 6 с установленным на нем датчиком 7 положения.Элементы 12 и 13, соединенные. друг с другом прямой и обратной связями, образуют фильтр сглаживания сигнала с тахогенератора. Динамика этого фильтра описывается оператором типа "апериодическое звено", выходной сигнал которого поступает на второй вход предварительного усилителя 2, осуществляя демпфирование следящей системы. Интегратор 9 и блок 10, соединенные друг с другом прямой и обратной связями, образуют фильтр сглаживания сигнала датчика положения. Выходной сигнал интегратора 9 поступает в качестве главной обратной связи по положению на второй вход измерителя 1...
Адаптивный следящий электропривод

Номер патента: 1647513
Опубликовано: 07.05.1991
Авторы: Довгань, Казачковский, Мусиенко
МПК: G05B 11/01
Метки: адаптивный, следящий, электропривод
...ускорению электропривода, а на выходе элемента 6 сравнения - ошибка по ускорению, Наблюдатель параметров объекта управления предназначен для определения текущего значения параметра 3/СуРНа выходе апериодического звена 20 Формируется оценка скоростиЬ(р) 1. (р)+а (р)Я(р)д (р) =У:а на выходах интеграторов 16 и 23 соответственно оценки параметров объекта управленияа (р)= - Ы(р)У(Р)-Ы(р)1Г ЛР, где- ток элекчропривода;и- нонстанты, обратные постоянным интегрирования интеграторов 16 и 23;9 - постоянная времени апериодического звена 20,При увеличении (уменьшении) параметра ЯС 9 уменьшается (увеличивается) скорость электропривода, а навыходе элемента 21 сравнения появляется отрицательный (положительный)сигнал рассогласования. Это приводит5к...
Система регулирования

Номер патента: 1654777
Опубликовано: 07.06.1991
Автор: Самедов
МПК: G05B 11/01
...отработке наброса задающего сигнала в начале процесса разгона произведение е у О. Для ускорения разгона корректирующее воздействие от производной у подается как положительная обратная связь, Это способствует резкому нарастанию выходной величины, однако угрожает перерегулированием, Данное состояние системы напоминает участок восстановления выходной величины при набросе возмущения, поэтому состояние системы контролиоуется вторым сумматором. Его выходной сигнал вновь определяется выражением Ос=я -Ку, В начале разгона величина рассогласования велика, а значение производной у еще мало, поэтому знак Оопределяется полярностью рассогласования. По мере нарастания выходной величины ошибки рассогласования уменьшается, производная у...
Двухконтурная однорегуляторная многоканальная система регулирования

Номер патента: 1658124
Опубликовано: 23.06.1991
Автор: Яковлев
МПК: G05B 11/01
Метки: двухконтурная, многоканальная, однорегуляторная
...уменьшения рассогласования ЬХь Таким образом, замыкается контур регулирования с тем объектом, у которого рассогласование максимально. Остальные объекты в зто время не подключены к блоку 1,Как только максимальным станет рассогласование в другом канале, блок 1 переключится к исполнительному устройству этого канала и замкнется другой контур регулирования, Поскольку изменения регулируемых величин имеют случайный характер, то и замыкания контуров происходят в случайные моменты времени, т,е. эпизодически, Это означает, что система работает по принципу приоритета максимального рассогласования (отклонения).Сигналы Х с второго выхода объекта 5 (с промежуточной точки объекта, имеющей значительно меньшие запаздывания и постоянную времени по...
Серводин

Номер патента: 1667000
Опубликовано: 30.07.1991
МПК: G05B 11/01
Метки: серводин
...4, выход которого через реле 5 30 реверса подключен к управляющему входукоммутатора б и определяет среднее значение напряжения на обмотках статора двигателя 7, Поле статора двигателя благодаря жесткой связи по угловому положению с 35 ротором через датчик 8 вращается синхронно с ротором, его угол с полем последнею составляет 90 эл.град., а его величина определяется глубиной модуляции широтно-импульсных последовательностей, т,е.40 пропорциональна рассогласованию Ь О.Поэтому двигатель, вращаясь как бесконтактный двигатель постоянного тока аналогично последнему в системе-прототипе, отрабатывает рассогласование, С уменьше нием сигнала ошибки в некоторый моментвремени 1 = т 1 на фиг. 2, определяемый величиной кода срабатывания...
Система автоматического управления для объектов с запаздыванием

Номер патента: 1667001
Опубликовано: 30.07.1991
МПК: G05B 11/01
Метки: запаздыванием, объектов
...интегратор 5 и второй элемент.6 сравнения,Объект 4 регулирования с запаздываниемимеет амплитудную характеристику, у которой О, где аО - частота, А( щ)=бА(ййИ= (под (Щ в) - комплексный коэффициентусиления. Система автоматического управления работает следующим образом, 25Выходной сигнал 01 задатчика 1 входного сигнала поступает на суммирующий вход первого элемента 2 сравнения, в котором формируется сигнал 0 г = Е, который поступает на вход регулятора 3. В качестве 30 регулятора 3 может быть использован один из известных регуляторов, имеющих передаточные функции, например, вида Ю/з(р) = К 1 + - + КзрКгР 35К 1 К 1 Т 1 р+1 а(р)- - 1, Я(р) -где К 1, Кг, Кз, Т 1, Тг - некоторые константы.Выходной сигнал 0 з = 0 регулятора 3...
Следящая система

Номер патента: 1672412
Опубликовано: 23.08.1991
Авторы: Введенский, Погребный
МПК: G05B 11/01
Метки: следящая
...контактов самоудерживающейся кнопки 11 включения от источника 17 поступают сигналы на первые входы элементов И 12 и 13, второй вход третьего элемента ИЛИ 16, э через замкнутые контакты концевых выключателей 10 и 18 - на вторые входы элементов И 12 и 13. первого элемента ИЛИ 14 и второго элемента ИЛИ 15. При этом замыкаются выходные цепи элементов И и ИЛИ, подготавливая систему к работе, причем первыи элемент И 12 замыкает цепь сигнала задатчика 1 скорости. обеспечивающую движение системы влево, а второй элемент И 13 замыкает цепь сигнала задатчика скорости, обеспечивающую движение системы вправо. Первый элемент ИЛИ 14 замыкает цепь усилителя, обеспечи 1672412вающую движение системы влево, второй элемент ИЛИ 15 замыкает цепь...
Устройство управления

Номер патента: 1672936
Опубликовано: 23.08.1991
Автор: Доминик
МПК: G01R 31/02, G05B 11/01
...осуществляться либо только путем зажима жестких штепсельных наконечникон 30, 36, осуществляемого с помощью винтов верхних клемм 25, 24, либо путем дополнительного зацепления крюков 47 оболочки в выемку 48 (система крюк - выемка), выполненную на верхней стороне 49 (фиг. 3). Система крюк - выемка размещается на участке 50 со стороны части 44 на удалении от штепсельных наконечников 30, 36.Фронтальная панель 51 корпуса несет клеммы 33-35, облегчая зажатие соответствующих винтов спереди, а также управляемую выступающую кнопку 52, которая связана с подвижным контактом переключателя 29 и которой можно управлять только с помощью инструмента типа отвертки. Проводники 53 нводятся в клеммы 33-35 через верх 45 нюю стенку модуля. Прозрачный колпак...
Устройство управления трехстепенным карданным подвесом

Номер патента: 1675844
Опубликовано: 07.09.1991
Автор: Никонов
МПК: G05B 11/01
Метки: карданным, подвесом, трехстепенным
...д области изменения знаковвыбирается исходя из минимума максимальной погрешности управления и задается задатчиком 16.Логика переключения знаков иллюстрируется временными диаграммами (фиг, 4)траектории прохождения наблюдаемойточки тела через особую область. при этом Опобозначает выходной сигнал п 1-го блока, Нафиг. 4 а представлен график изменения иэмеренного сигнала соз Рп с датчика 13, поступающего на вход блока 15 и затем блока20, на выходе которого формируется абсолютное значение Соз Р, 1("выпрямленныйсигнал) (фиг, 4 б). На выходе компаратора 1521 формируются прямоугольные сигналы,соответствующие условию (4) (фиг. 4 в). Навыходе блока 22 дифференцирования формируются импульсы переднего и заднегофронтов сигнала нахождения в особой...
Система ориентации и стабилизации астрономического телескопа

Номер патента: 1679466
Опубликовано: 23.09.1991
Авторы: Гаспарян, Егиазарян, Захарян
МПК: G05B 11/01
Метки: астрономического, ориентации, стабилизации, телескопа
...задатчика6 отключаются от входов усилительно-преобразующих блоков 8 и 9,В результате указанных действий иэображение исследуемой звезды Я 1 оказывается в центральной области фокальнойплоскости телескопа 1, а иэображение опорной звезды 32 - в поле зрения астродатчика25 5, Затем к входам усилительно-преобразующих блоков 8 и 9 через блок управления икоммутации 7 подключаются соответственно первой и второй выходы астродатчика 5,Сигналы рассогласования с выходов астро 30 датчика 5 поступают в усилительно-преобразующие блоки 8 и 9, где формируютсясигналы управления исполнительными механизмами 10 и 11 и через опорно-поворотноеустройство 3 телескопа поворотами телескопа35 1 осуществляется приведение изображенияопорной звезды Я 2 в "нуль"...
Устройство управления исполнительными механизмами

Номер патента: 1697053
Опубликовано: 07.12.1991
МПК: G05B 11/01
Метки: исполнительными, механизмами
...При подключении устристочнику питания на второй входчателя 1 через накопительный эпоступает кратковременный сигна При замисходящеммеханизм аключателя 1поступает сключательего рабочемческой единвход элеменвходе элемелогического переключателя еской единицы, питания через на рабочем выется сигнал лопоступает на Е 2, На выходе сигнал логичеызывает срабаеханизма.Заказ 4305 ВНИИПО Подписноеа по изобретениям и открытия1-35, Раушская иаб 4/5 1 ираж Осудаоственного комите 113035, Москва.ри ГКНТ СССРроизводствено-из 11 иел Ский ком: 148 тате 4 т", г, Ужгород, ул.Гаарина, 1 О 1 СИГНВЛ ЛОГИЧЕСКОЙ ЕИНИЦЫ, И 1 фСГИ 4 ИТЕь"ный механизм ие срабатывае.-,Посла прекращения воздействия моче.тьконтакт ключа 6 Возвраца 1 ется В исходое разомкнутое)...
Двухотсчетный следящий привод

Номер патента: 1700535
Опубликовано: 23.12.1991
Авторы: Архангельский, Бродовский, Замбржицкий, Муратова, Петухова, Свицын, Семенов
МПК: G05B 11/01
Метки: двухотсчетный, привод, следящий
...сигнал, а сигналкорректором 7 преобразуется в сигнал 6, при нулевом значении сигналапроисходит инверсия сигнала ,На фиг, ч цифрами 1, 2, 1, 8 показана относительная цена, которую имеет каждый разряд кода точного отсчета регистра 3 при преобразовании его в аналоговую величину. ГраФик У (тонкая линия) соответству= ет зависимости сигнала цифроаналогового преобразователя 8 при отсутствии корректора 7. При работе коррек тора 7 график преобразуется в зависимость Б, показанную на Фиг, б жирной линией. Этот график получается суммированием значений сигналов О, 5, 6, 6 взятых со своей ценой каждый. Такой сигнал. получается на выходе цифроаналогового преобразователя 8 точного отсчета и поступает на вход экстраполятора 22, с выхода которого...
Цифроаналоговая следящая система

Номер патента: 1700536
Опубликовано: 23.12.1991
Авторы: Архангельский, Бродовский, Замбржицкий, Муратова, Петухова, Свицын, Семенов
МПК: G05B 11/01
Метки: следящая, цифроаналоговая
...с помощью корректора 4 входного кода преобразователя 3, одновременно происходит скачкообразное уменьшение напряжения Б на выходе преобразователя 3 на величину, равнуюполовине опорного напряжения, переключение потенциометров 16, и 17 ипереход переключателей 22, 23, 2627 в состояние, противоположноеизображенному на фиг.1. В этом случае ступенчатый сигнал точного отсчета Б сглаживается интегрирующим звеном, образуемым последовательной цепью из резистора 19,замкнувшегося замыкающего контакта переключателя 22 и запоминаюФщего конденсатора 25,. вторая обкладка юторого через замкнувшийся замыкающий контакт переключателя 27 и размыкающий контакт переключателя 29 подключается к выводу источника опорного напряжения с напряжением,...
Трехканальная следящая система

Номер патента: 1716479
Опубликовано: 28.02.1992
Автор: Кузнецов
МПК: G05B 11/01
Метки: следящая, трехканальная
...последовательно соеФ- рой и третийненные источник опорнорного напряжениятели третьего привода,ммэто, силитель мощности, исполниНа фиг.2 показана структурная схемательный двигатель и редуктор, выход которого является выходом привода, а также ф рфильтров.ходом с вы- Схема содержит интеграторы..41 42д атчик скорости, соединенный входом с ватчик масштабирующие усилители 43-48, суммаходом исполнительного двигателя, и да- -, а, вход которого соединен с выходом уси- рто ы 49-51,Трехканальная следящая система работает следующим образом.При равенстве входного ф и выходного а 1 воздействий грубого первого привода 8 исполнительный двигатель 12 и исполнительный двигатель 20 опорного второголривода 16 вращаются с. одинаковыми по величине, но...
Устройство для управления электрической установкой

Номер патента: 1718738
Опубликовано: 07.03.1992
Автор: Доминик
МПК: G05B 11/01, H01H 50/04
Метки: установкой, электрической
...также имеет входы для отверстия для осуществления зажатия проводников 64, оканчивающихся на входных клеммах 65 и 66 модуля, сами эти входы выходят на верхнюю сторону модуля.В данном случае, этих клемм только две. но их число может быть больше, как это показано на фиг,1.1718738 10 15 20 25 30 35 40 45 50 Каждый корпус 47 модулей, обозначенных позициями 41 и 46 на фиг,1, имеет ширину с 1, близкую к ширине 01-02 подсоединенных контакторов 31-36, эташирина измеряется параллельно рядам клемм мощности,Когда контакторный корпус 36 является более широким, чем контакторы 31-35, к нему могут подсоединяться одни и те же модули благодаря наличию клемм обмоток, имеющих зазоры, соответствующие зазорам штепселей, либо благодаря тому, что даже если эти...
Система автоматического сопровождения телескопа

Номер патента: 1725181
Опубликовано: 07.04.1992
Автор: Кузнецов
МПК: G05B 11/01
Метки: сопровождения, телескопа
...12 сигнала рассогласования, пропорционального отклонению направлений электрической оси телескопа и объекта исследования, второй привод 6, соединенный через вторую ком 35 большое зеркало 9 на некоторый угол Уг 40 50 55 5 10 15 20 25 30 мутирующую группу 15 коммутатора 16 с выходом приемного устройства 12, начинает отрабатывать это рассогласование, поворачивая малое зеркало 10 на некоторый угол Уз (фиг,2), Одновременно сигнал с выхода приемного устройства 10 через вторую коммутирующую группу 15 и первый регулятор 2 подается на входы третьего привода 7 и первого привода 5,Третий привод 7 через опорно-поворотное устройство 8 начинает разворачивать большое зеркало 9 на угол У, а первый привод 5 также доворачивает большое зеркало 9 на...
Цифровая следящая система

Номер патента: 1730610
Опубликовано: 30.04.1992
Авторы: Заплечников, Кузьменков, Любецкий, Михалев
МПК: G05B 11/01
...при нулевом рассогласовании, т,е. система обладает астатизмом по отношению к моментным возмущениям,При подаче на вход системы, например, большого скачкообразного сигнала код модуля сигнала ошибки превышает код срабатывания пороговых элементов, т,е.1 ЛВЬОл, срабатывают пороговые элементы 3 и 4, в результате чего обнуляется выход умножителя 11, и выход ПКЧ 14 отключается от входа ЦШИП 5, Срабатывание порогового элемента 4 приводит к тому, что при помощи умножителя 12 и сумматора 13 к этому входу ЦШИП 5 подключается импул ьсн ы й выход ДП Р 10. Одновременно по сигналу ЬОп БПА 16 преобразует выходной код БФА 15 таким образом, что угол между магнитными потоками статора Ф, и ротора Фр БДПТ 8 составит 90 эл. град. Код сигнала ошибки ЛВ...
Исполнительный механизм

Номер патента: 1737406
Опубликовано: 30.05.1992
Авторы: Гоцалюк, Значковский, Осецкий
МПК: G05B 11/01
Метки: исполнительный, механизм
...пленочного рукава. Целью изобретения является расширение диапазона рабочих узлов и повышение помехозащищенности механизма. Исполнительный механизм содержит сельсин с подпружиненным ротором, первая из обмоток которого подключена к источнику трехфазного синусоидального напряжения, а вторая связана через выпрямитель с управляемой нагрузкой, выполненной в виде усилительного элемента с подключенным к его входу источником управляющего сигнала. Новым является то, что устройство снабжено конденсаторами, один из которых подключен параллельно выходу выпрямителя, а другой подключен к входу последнего последовательно с второй обмоткой сельсинэ. Усилительный элемент управляемой нагрузки включен по схеме управляемого стабилизатора тока....
Устройство управления пьезодвигателем

Номер патента: 1737407
Опубликовано: 30.05.1992
Авторы: Дмитриев, Лукичев, Трубников
МПК: G05B 11/01
Метки: пъезодвигателем
...5 через делитель 1 поступает сигнал с выхода устройства. На выходе второго компаратора 5 формируется сигнал (фиг. 2, в) лог. "1" при положительном сигнале на выходе устройства и сигнал лог, "0" - при отрицательном сигнале.Коммутатор 12 работает следующим образом.При подаче на его управляющий вход сигнала лог. "1" сигнал с информационного входа проходит на первый выход, при подаче сигнала лог, "0" - на второй выход,При заряде пьезодвигателя от нуля до некоторого положительного напряжения (участоки с ,фиг,2) на выходах первого и второго компараторов 4 и 5 формируются сигналы лог, "1" . На выходе элемента 6 ИСКЛЮЧАЮЩЕЕ ИЛИ формируется сигнал лог, "О" (фиг. 2 и), соответственно на выходе инвертора 7 - сигнал лог, "1", который вызывает...
Импульсная следящая система

Номер патента: 1746359
Опубликовано: 07.07.1992
Автор: Жун
МПК: G05B 11/01, G05B 11/26
Метки: импульсная, следящая
...9 рассогласования (наносекунды);Кпер - отношение максимальной длительности импульса Хвх к его минимальной длительности. Кпер может быть выбрано любым от 1 до 100 и более. Чем больше К пер и меньше г аад. тем меньше составляющая погрешности, г эад/21/ К пер и практически реально достижение ее знэчв.,я бесконечно малой величины третьего четвертого порядка.Кс.ппр - коэффициент, учитывающий работу чувствительного элемента и ри наличии сухого трения (кулоновского), В.ыполнение чувствительного элемента конденсаторного типа (или еще более точного) уменьшает5 10 Кс.вр до малой, величины. а выражение Гзад/2, 1/Кпер ф Кслпр дает в результате уменьшение порядка бесконечно малой величины до второго - третьего порядка,Кп - коэффициент,...
Двухкоординатный следящий привод

Номер патента: 1764029
Опубликовано: 23.09.1992
Автор: Казаков
МПК: G05B 11/01
Метки: двухкоординатный, привод, следящий
...полумуфты кинематически" связаны с входом преобразователя угол - напряжение. На чертеже показана функциональная схема двухкоординатного следящего йриводаДвухкоординатный следящий привод содержит общий электродвигатель 1, общий редуктор 2 с двумя кинематическимй выходами 3 й 4 в перпендикулярных направлениях, два идентичных канала регулирования 5 и 6,расположенйыхвдвухвз"аймйойерпендикулярных плоскостях х и у объекта 7,Каждый канал регулирования содержит две электромагнитные муфты 8 и 9, датчик 10 угла наклона, преобразователь 11 угол - напряжейие, компаратор 12, два электронных ключа 13,В электромагнитных муфтах 8 и 9 ведущие полумуфты 14 кинематически связанызубчатыми колесами 15 и 16 между собой, азубчатым колесом 15 - с...
Следящая система

Номер патента: 1764030
Опубликовано: 23.09.1992
Авторы: Загашвили, Никитин, Рябинова
МПК: G05B 11/01
Метки: следящая
...работу силы (момента) требуеУмую для его торможения на оставшемся участке рассогласо ван ия, т.е. о и редел яет момент начала торможения, Этот сигнал управляет вторым ключом, который при выполнении условия (1) замыкается, а блок формирования линейно изменяющихся сигналов начинает вырабатывать линейно убывающий сигнал, Вторым выходом блока управления является выход второго релейного элемента с зоной нечувствительности, на вход которого поступает сигнал модуля ошибки, Зона нечувствительности устанавливается равной величине ошибки, соответствующей зоне малых рассогласований, Сигнал с этого выхода управляет первым и третьим ключами, т,е. переключает систему с режима работы в зоне точного позиционирования на режим отработки больших...
Следящий электропривод

Номер патента: 1764031
Опубликовано: 23.09.1992
Авторы: Гришко, Губанов, Дубин, Орлов
МПК: G05B 11/01
Метки: следящий, электропривод
...второй вход которого соединен с выходом датчика скорости, соединенного входом с выходом электродвигателя, выход первого сумматора соединен с входом режекторного фильтра, выход которого через усилитель подключен к входу пьезодвигателя,На чертеже изобоажена блок-схема следящего электропривода.Следящий электропривод содержит основание 1, электродвигатель 2, кинематически связанный с подвижной платформой 3, задатчик положения 4, выход которого связан с пеовым входом первого сумматора 5, второй сумматор 6, датчик скорости 7, пьезодвигатель 8, установленный на подвижной платформе 3, исполнительный орган 9, интерферометрический датчик положения 10 выход которого соединен с вторым входом первого сумматора 5, преобразователь 11,...
Электромеханическая следящая система

Номер патента: 1764032
Опубликовано: 23.09.1992
Автор: Малафеев
МПК: G05B 11/01
Метки: следящая, электромеханическая
...ее в соответствии с выбранным законом регулирования, например П-, ПД-, или ПИ-, Выходной сигнал ц 2 регулятора 2 положения поступает на суммирующий вход регулятора 3 скорости, на вычитающий вход которого поступает сигнал ц 4 с выхода корректирующего устройства 4, На выходе корректирующего устройства 4 действует выходной сигнал ц 14 датчика 14 скорости. Назначение корректирующего устройства 4 - формирование заданных динамических свойств контура регулирования скорости, При этом корректирующее устройство 4 может быть выполнено, например, в виде пропорционального, реального дифференцирующего, интегродифференцирующего или другого звена,Выходной сигнал цз регулятора 3 скорости поступает на суммирующий вход регулятора 5 мощности потерь, на...
Следящая система с ограниченным углом поворота выходного вала

Номер патента: 1783469
Опубликовано: 23.12.1992
Автор: Ледерер
МПК: G05B 11/01
Метки: вала, выходного, ограниченным, поворота, следящая, углом
...напряжение поступает на первый вход формирователя 9 сигнала управления, на второй вход которого подается напряжение с выхода схемы сравнения 5, пропорциональный фактической скорости вращения электродвигателя 1, С выхода формирователя 9 сигнала управления напряжение, пропор. циональное разности между заданной и фактической скоростями вращения ротора электродвигателя 1, подается через усилитель 8 мощности и масштабирующий резистор 6 на обмотку электродвигателя 1, Ротор электродвигателя 1 на пинает вращаться и перемещает нагрузку 2, Вращение ротора происходит до тех пор, пока нагрузка 2 йе встанет в положение, определяемое задатчиком 11, Как только нагрузка 2 встанет в требуемое положение, обмотка электродвигателя 1 обесточивается,...
Система управления гелиостатом

Номер патента: 1784100
Опубликовано: 23.12.1992
МПК: G05B 11/01
Метки: гелиостатом
...2 - зенит назад.Эти сигналы поступают на функциональный преобразователь, При возникновении аварийной ситуации на теплотехническом оборудовании или по метеоусловиям датчики аварийной ситуации 6 выдают сигналы, поступающие на формирователь закона аварийного управления 7, который взависимости от вида аварийного сигнала:а) сигнального анемометра типа Мпо повышению скорости ветра до максимально установленной, выводит отражатель гелиостата в горизонтальное состояние;б) при граде в качестве датчика могут служить контакты пульта ручной установки, отражатель гелиостата выставляется в вертикальное положение;в) при аварии на теплосиловс.оборудовании от контактов реле защит блока, фокусированная гелиостатами солнечная энергия должна быть убрана с...
Резервированный релейный регулятор

Номер патента: 1790775
Опубликовано: 23.01.1993
МПК: G05B 11/01, G05B 9/03
Метки: регулятор, резервированный, релейный
...компенсирует нарастание входного сигнала Хь вследствие чего релейный элемент 5 выкл ючается, а при нарастании входного сигнала происходит включение релейного элемента 5 (при выключенном релейном элементе 5 сигнал а не компенсирует нарастание входного сигнала Х), Иначе говоря, выходной сигнал релейного элемента 5 представляет собой последовательность импульсов, частота следования которых определяется параметрами сигнала Хь его производнойХ,и параметрами инерционного звена 11.Если тф - время формирования импульса формирователем 6, то его выходной сигнал О 2 будет представлять собой релейный сигнал при условии, что время ск между двумя соседними импульсами сигнала О 1 лежит в пределах 0 с Уф и импульсный сигнал длительностью тф при...
Система регулирования положения
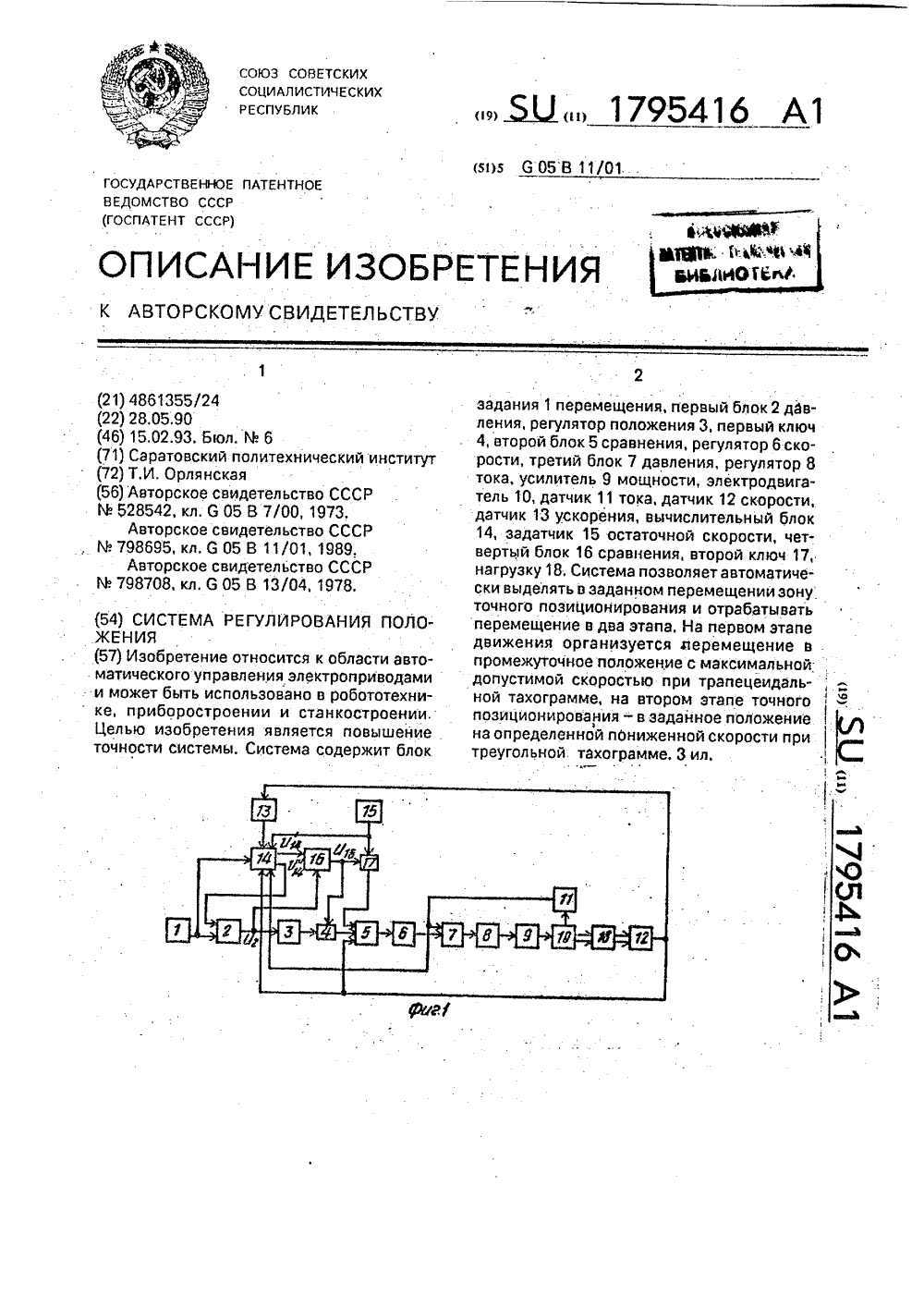
Номер патента: 1795416
Опубликовано: 15.02.1993
Автор: Орлянская
МПК: G05B 11/01
Метки: положения
...ускорение электродвигателя,Перемещение в зоне точного позиционирования Я 2 определяется выражением. где вост - средняя остановочная скорость.Значение средней остановочной скоро-. сти вос рассчитывается до настройки системы исходя иэ максимальной допустимой погрешности позиционирования ЬуЪах.доп, с учетом отклонения параметров системы согласно выражениюЖостгдеК 11 ЛЖвахйС + Ь йвах/1 с(ЮвахИср ) (твах 11 ср ) ,еср - среднее значение ускорения тор 10 можения,тср - среднее время срабатывания аппаратуры системы;асср - средний приведенный к валу дви-.гателя момент инерции;Мдин.ср - среднее значение динамического момента на валу электродвигателя;Ь ОЪах, Лвах Ь Мдин.ва - отклоненияпараметров электродвигателя от среднихзначений.20 В период...
Цифровая следящая система

Номер патента: 1797093
Опубликовано: 23.02.1993
Авторы: Заплечников, Кузьменков, Любецкий, Михалев
МПК: G05B 11/01
...величины рассогласования при помощиБФАС 12 угловое положение магнитного поля статора, реализуются два режима рабатыэлектродвигателя цифровой следящей системы: при больших рассогласованияхЬОЬОп поля ротора и статора электродвигателя разнесены на 90 эд,град, т.е.реализован режим БДПТ Зс релейным регулятором. При малых рассогласованияхЬОЬОп поля ротора и статора пространственно совмещены и изменение углового положения поля статора происходитпропорционально рассогласованию, т.е, реализован дискретно-шаговый режим работы электродвигателя,Для обеспечения указанных режимов30 работы системы коммутацию тактовых входов счетчика 25 необходимо проводить согласно следующим логическимвыражениям:вход "+1" = 100 п + Оп(1 ш + Я)35ВХОД "-1" = Оп +...