Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
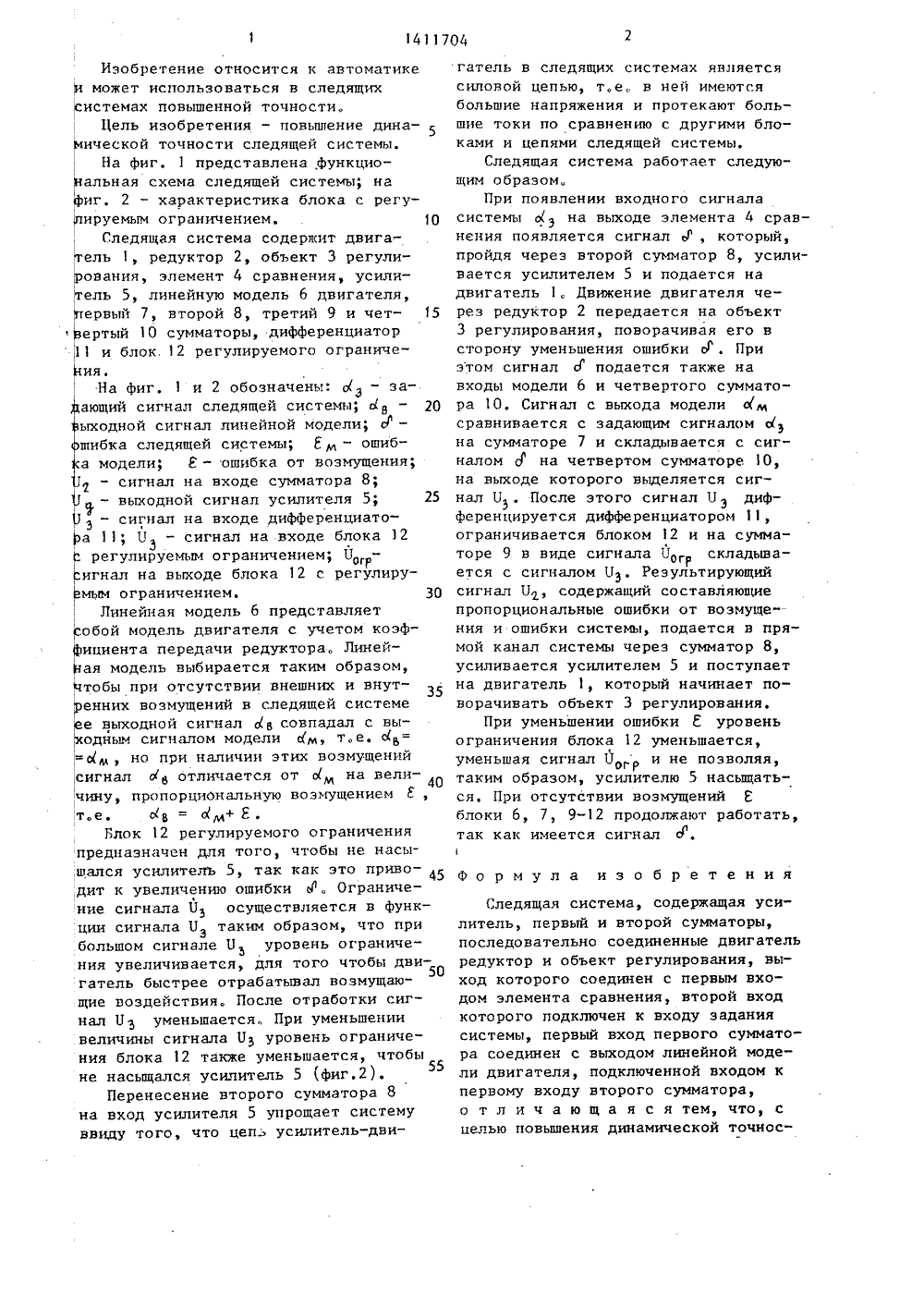
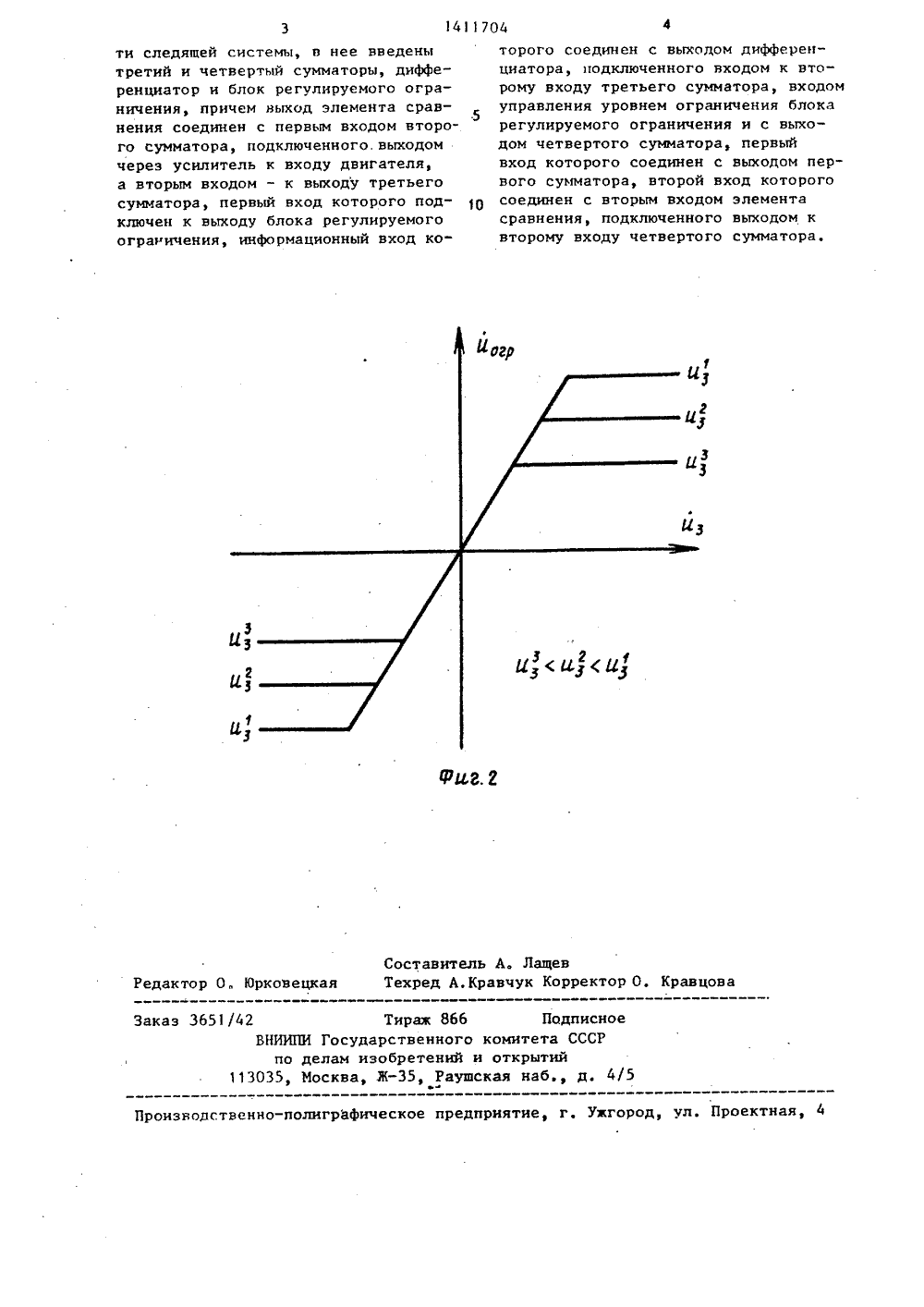
(21) Ц (22) 16 (46) 23 (71) На 2805/24 тут авт Томском ных сис троники (72) С. (53) 62 (5 В В.С. Фадеев Видилин50 (088,линеин торы 7 идетельство СССР05 В 11/00, 1984.етельствоСССР05 В 11/О 1, 1983,6) Авторское с 1115013, кл. О Авторское сви 1109712, кл. 0 ОСУДАРСТВЕННЫИ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ К АВТОРСКОМУ СВИ ЕТЕЛЬСТВ 12,86 07.88. Бюл. В 27учно-исследовательский инстиматики и электромеханики при институте автоматизированм управления и радиоэле(57) Изобретение относится к автоматике и может использоваться в следящих системах повьвенной точности. Целью изобретения является повьпоение динамической точности следящей системы, Система содержит двигатель 1, редуктор 2, объект регулирования 3, элемент сравнения 4, усилитель 5,ую модель 6 двигателя, сумма 8, 9, 10, дифференциатор 11 и блок регулируемого ограничения 12, В системе компенсируется инерционность электромеханической части следящей системы и предотвращается насыщение усилителя системы, 2 ил,Изобретение относится к автоматике й может использоваться в следящих системах повышенной точности. Цель изобретения - повьппение дина 5 кической точности следящей системы,На фиг. 1 представлена .функциоальная схема следящей системы; на иг. 2 - характеристика блока с регуируемым ограничением, 10Следящая система содержит двигатель 1, редуктор 2, объект Э регулиования, элемент 4 сравнения, усилитель 5, линейную модель 6 двигателя,ервый 7, второй 8, третий 9 и четертый 10 сумматоры, дифференциатор 11 и блок. 12 регулируемого ограничеия.На фиг, 1 и 2 обозначены: с - заающий сигнал следящей системы; Ып - 20 ыходной сигнал линейной модели; д - шибка следящей системы; Г - ошиба модели; Я - ошибка от возмущения", - сигнал на входе сумматора 8; - выходной сигнал усилителя 5; 25 3сигнал на входе дифференциатоа 11 1 - сигнал на входе блока 121регулируемым ограничением; О - игнал на выходе блока 12 с регулирумЬм ограничением, 30Линейная модель 6 представляет обой модель двигателя с учетом коэфициента передачи редуктора. Линейая модель выбирается таким образом, тобы при отсутствии внешних и внутенних возмущений в следящей системе е выходной сигнал Ып совпадал с выодным сигналом модели , т,е. Ы= ;-Ыд, но при наличии этих возмущений сигнал п отличается от см на вели чину, пропорциональную возмущением Е, т,е, Ып = с + Я,Блок 12 регулируемого ограничения предназначен для того, чтобы не насыщался усилитель 5, так как это приво,дит к увеличению ошибки Ф . Ограниче 4 ние сигнала П осуществляется в функции сигнала Уз таким образом, что при большом сигнале П уровень ограничеЬ ния увеличивается, для того чтобы двигатель быстрее отрабатывал возмущающие воздействия. После отработки сигнал П уменьшается При уменьшении величины сигнала Уз уровень ограничения блока 12 также уменьшается, чтобы не насьщался усилитель 5 (фиг.2).55Перенесение второго сумматора 8 на вход усилителя 5 упрощает систему ввиду того, что цеп усилитель-двигатель в следящих системах являетсясиловой цепью, т,е. в ней имеютсябольшие напряжения и протекают большие токи по сравнению с другими блоками и цепями следящей системы,Следящая система работает следующим образом.При появлении входного сигналасистемы о( на выходе элемента 4 сравнения появляется сигнал Г, который,пройдя через второй сумматор 8, усиливается усилителем 5 и подается надвигатель 1, Движение двигателя через редуктор 2 передается на объектЭ регулирования, поворачивая его всторону уменьшения ошибки о". Приэтом сигнал д подается также навходы модели 6 и четвертого сумматора 10, Сигнал с выхода модели емсравнивается с задающим сигналом о(на сумматоре 7 и складывается с сигналом д на четвертом сумматоре 10,на выходе которого выделяется сигнал. После этого сигнал П дифЭференцируется дифференциатором 11,ограничивается блоком 12 и на сумматоре 9 в виде сигнала О складывается с сигналом У 3 Результирующийсигнал Ц, содержащий составляющиепропорциональные ошибки от возмуще"ния и ошибки системы, подается в прямой канал системы через сумматор 8,усиливается усилителем 5 и поступаетна двигатель 1, который начинает поворачивать объект Э регулирования.При уменьшении ошибки Е уровеньограничения блока 12 уменьшается,1уменьшая сигнал У и не позволяя,таким образом, усилйтелю 5 насьщаться. При отсутствии возмущений Еблоки 6, 7, 9-12 продолжают работать,так как имеется сигнал д,1 Формула изобретенияСледящая система, содержащая усилитель, первый и второй сумматоры, последовательно соединенные двигатель редуктор и объект регулирования, выход которого соединен с первым входом элемента сравнения, второй вход которого подключен к входу задания системы, первый вход первого сумматора соединен с выходом линейной модели двигателя, подключенной входом к первому входу второго сумматора, о т л и ч а ю щ а я с я тем, что, с целью повьппения динамической точнос1411 7 О 4 2 оставитель А. Лащевехред А,Кравчук Корректор О, Кран Редак Ю ецка каз 3651/42 Тираж 866 ПаИИПИ Государственного комитетапо делам изобретений и открытии5, Москва, Ж, Раушская наб. исноеСР графическое предприятие, г. ужгород, ул. Проектная, 4 Производственно ти следящей системы, в нее введенытретий и четвертый сумматоры, дифференциатор и блок регулируемого ограничения, причем выход элемента сравнения соединен с первым входом второго сумматора, подключенного, выходомчерез усилитель к входу двигателя,а вторым входом - к выходу третьегосумматора, первый вход которого подключен к выходу блока регулируемогоограничения, информационный вход которого соединен с выходом дифференциатора, подключенного входом к второму входу третьего сумматора, входомуправления уровнем ограничения блокарегулируемого ограничения и с выходом четвертого сумматора, первыйвход которого соединен с выходом первого сумматора, второй вход которогосоединен с вторым входом элементасравнения, подключенного выходом квторому входу четвертого сумматора.
СмотретьЗаявка
4162805, 16.12.1986
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ ПРИ ТОМСКОМ ИНСТИТУТЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
ВИДИЛИН СЕРГЕЙ ФЕДОРОВИЧ, ФАДЕЕВ ВЛАДИМИР СТЕПАНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 23.07.1988
Код ссылки
<a href="https://patents.su/3-1411704-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Система управления двигателем с блоком защиты от перегрузок

Номер патента: 1749976
Опубликовано: 23.07.1992
Авторы: Громыкин, Губин, Карайченцев, Петровский
МПК: H02H 7/08, H02M 7/538
Метки: блоком, двигателем, защиты, перегрузок
...системы,Система содержит инвертор 1 с резистором 2 на входе, инвертор 3, резисторы4 - 6, первый транзистор 7, диоды 8 - 13, второй транзистор 14, диоды 15 и 16 в цепи30 коллектора первого транзистора, резисторы 17 - 20, третий транзистор 21, резистор 22в цепи базы первого транзистора, четвертый транзистор 23, стабилизатор напряжения, выполненный на резисторе 24,35 конденсаторе 25 и стабилитроне 26, пятыйтранзистор 27, к базе которого подключенрезистор 28, шестой транзистор 29, базакоторого подключена к коллектору фототранзистора оптрона 30, подстроечный рези 40 стор 31 и резистор 32.Система работает следующим образом,На вход инвертора 1 поступает. сигналширотно-импульсной модуляции (ШИМ)фиг.2),145 Пройдя через инвертор 1, сигнал...
Система питания трехфазных асинхронных двигателей с блоком защиты от опрокидывания

Номер патента: 1408492
Опубликовано: 07.07.1988
Авторы: Жарков, Мунтян, Шокарев
Метки: асинхронных, блоком, двигателей, защиты, опрокидывания, питания, трехфазных
...и 15 равна числу ампервитков обмотки 12 и обмотки13При этом соотношение ампервитковобмоток 14 и 15 равно 2;1Первичные обмотки 12-15 могут включаться на токи фазно либо непосредственно включением их в рассечки питающих проводов, как это изображено начертеже, либо через трансформаторы55тока, установленные в этих Фазах,Включение первичных обмоток сумматора в фазные провода электродвигателейчерез стандартные трансформаторы тока позволяет унифицировать первичныеобмотки, т,е. выполнять их на одинаковые токи с несколькими отпайкамидля выравнивания числа ампервитковпо фазам.Устройство работает следующим образом,В нормальном режиме работы по обмотке 12 протекает ток фазы С, пообмотке 13 - ток фазы В, по обмоткам14 и 15 - токи фазы А. Токи...
Система питания трехфазных асинхронных двигателей с блоком защиты от опрокидывания

Номер патента: 1534612
Опубликовано: 07.01.1990
МПК: H02H 7/08
Метки: асинхронных, блоком, двигателей, защиты, опрокидывания, питания, трехфазных
...7 и 8 первой группы. Обмотка14 включена на ток фазного (А) провода 20, питающего электродвигатель1, отличающийся по мощности от электродвигателей 2 и 3 третьей группы.Сумма амдервитков первичных обмоток13 и 14 равна числу ампервитков обмоток 11 и 12, При этом соотношениеампервитков обмоток 13 и 14 равно2;1. Фазная обмотка статора электродвигателя 3 первой группы подключенак проводу 17 одноименной фазы (С),объединяющего одинаковые по мощности 15 20 25 30 40 45 50 55 электродвигатели 7 и 8 первой группы, в разрыв которого включена первичная обмотка 11 магнитного сумматора 9.Первичные обмотки 11-14 могут включаться на токи фаз либо непосредственным включением их в рассечки питающих проводов (чертеж), либо через трансформаторы тока,...
Система питания трехфазных асинхронных двигателей с блоком защиты от опрокидывания

Номер патента: 1775791
Опубликовано: 15.11.1992
МПК: H02H 7/08
Метки: асинхронных, блоком, двигателей, защиты, опрокидывания, питания, трехфазных
...органу 17, воздействующему на снятие питания с шин А,В,С. Первичная обмотка 12 включена на ток общего фазного (С) питающего провода 18, объединяющего одинаковые по мощности электродвигатели 7-9 одной иэ групп. Первичная обмотка 13 включена на ток общего фаэного (В) питающего провода 19, объединяющего одинаковые по мощности электродвигатели 4,5,6 другой группы. Первичная обмотка 14 включена на ток общего фазного (А) питающего провода 20, объединяющего одинаковые на мощности электродвигатели 2- и 3 третьей группы, Обмотка 15 включена на ток фазного (А) провода 21, питающего электродвигатель 1, отличающийся по мощности от электродвигателя 2 и 3 третьей группы. Сумма ампервитков первичных обмоток 14 и 15 равна числу ампервитков...
Импульсная следящая система

Номер патента: 553592
Опубликовано: 05.04.1977
МПК: G05B 11/26
Метки: импульсная, следящая
...положеншо, который поступает на сумматор 7. При этом вклю чается усилитель мощности 8, приводящий в553592 Составитель Ю. Гладков Техред М, Семенов Корректор В. Дод Редактор Л. Утехина Тираж 1106 Подписи о Изд о 14 Заказ 798/9 Типография, пр. Сапунова, 2 движение двигатель постоянного тока 9, на одном валу с которым закреплен датчик положения 10. Выходные импульсы датчика 10 поступают на второй вход счетчика 1, который в каждый текущий момент времени фиксирует разность числа входных импульсов и импульсов датчика 10. Эта разность и представляет собой ошибку системы по положению. Для устранения автоколебаний при отработке одиночных входных импульсов используется корректирующее звено 4, которое выдает корректирующие импульсы при каждом...
Предыдущий патент: Система автоматического регулирования
Следующий патент: Копировальное следящее устройство для управления станком
Случайный патент: Учебный прибор по математике