G05B 19/00 — Системы программного управления
Всесоюзная ft irrtrt -., ., ., т” -” каяавторыamp; б1отека ivibaиа. а. нарцовв нефтепереработке и нефтехимии

Номер патента: 370523
Опубликовано: 01.01.1973
МПК: G05B 19/00
Метки: irrtrt, ivibaиа, б1отека, всесоюзная, каяавторыamp, нарцовв, нефтепереработке, нефтехимии
...соединены с входами блока И исполнительных органов.Блок И исполнительных органов состоит из схем 15 собирания и исполнительных реле 16. Выходы дешифратора 18 непосредственно или чсрез схемы 15 собирания подключены к линиям включения исполнительных реле 16, а выходы дошифратора 14 непосредственно или через схемы 15 собирания - к линиям отключения исполнительных реле 16. Через схемы 15 собирания подключены те исполнительные реле 16, которые за цикл работы хроматографа должны быть включены несколько раз, при этом каждая схема 15 собирания должна иметь столько входов, подключенных к соответствующим выходам дешифратора 18 или 14, сколько раз в течение цикла нужно ьключить и отключить исполнительное реле 16, соединенное с выходами...
Всесоюзная патнтно-тс-а: л”: -ндя

Номер патента: 370587
Опубликовано: 01.01.1973
Автор: Шацилло
МПК: G05B 19/00
Метки: =ндя, всесоюзная, патнтно-тс-а
...близости друг от друга; прп этом в исходном положении все четные одноименные отверстия пластин, а также одно отверстие распределительной решетки совпадают, образуя светопроводы А 1-А 4, Б 1-Б 4 (при отсутствии шторок в отверстиях луч света проходит по светопроводу). Лучи каждых двух светопроводов, например свето- проводов А 1, Б 1; А 2, Б 2; АЗ, БЗ; А 4, Б 4, выведены на отдельные фотоэлементы 11, 12, 13 и 14 (что возможно, например, при помощи отражателей), имеющие выходы соответственно на реле 15, 16, 17 и 18.Каждая программная пластина имеет свой индивидуальный электромагнитный приводЧетноеотверстие25есть шторканет шторкиесть шторканет шторки Нечетное отверстие Функция У=Х У= - Х У=О У=1 нет шторкиесть шторкаесть шторканет...
^иалиотена

Номер патента: 376180
Опубликовано: 01.01.1973
Автор: Борисов
МПК: B23Q 5/20, G05B 19/00
Метки: иалиотена
...заданной координаты,ЗО чии перебега. При этом очереКорректор Н, Аук Редактор В, Дибобес Заказ 1603/12 Изд, Мо 426 Тираж 888 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Ж, Раушская наб д. 4/5 Типография, пр. Сапунова, 2 команд на останов прямого движения и включения компенсационного не имеет значения, т. е. команду на включение компенсационного движения можно подавать как до, так и после подачи команды на останов прямого движения. Для того, чтобы перебег и компенсационное движение не превышали одного шага, команды на останов, как прямого, так и компенсационного движения подают не позже максимального времени срабатывания уст 10 ройств останова до окончания шага.Все команды...
Система автоматического управления положением инструмента металлорежущего станка

Номер патента: 382065
Опубликовано: 01.01.1973
МПК: G05B 19/00, G05B 19/39
Метки: инструмента, металлорежущего, положением, станка
...системы осуществляется следующим образом.В исходном положении (фиг, 5, 6) резец устанавливается блоком 1 в точку 0 начала программируемого окончательного чернового контура 13 детали. В этом положении включается максимальная рабочая подача.Момент соприкосновения инструмента и детали фиксируется либо датчиком 7, либо устройством б, либо одновременно тем и другим.При этом блок 8 в случае срабатывания датчика 7 (припуск 1) 1 пред) выдает команду на прекращение перемещения по Х и включение движения по У, пока датчик не выйдет на границу контура заготовки.В случае (фиг, 6), если соприкосновение инструмента и детали сопровождается только сигналом устройства б (1(1 пред), блок 8 выдает команду перехода с максимальной на рабочую подачу,...
Устройство для позиционирования рабочегооргана

Номер патента: 413021
Опубликовано: 30.01.1974
Авторы: Алексеев, Голод, Делюнов, Курдюмов
МПК: B23Q 5/00, F16H 43/00, G05B 19/00 ...
Метки: позиционирования, рабочегооргана
...с приводом 36,Деления шкалы нарезаются путем последовательных перемещений рабочего стола 6 с заготовкой 7 и резцового суппорта 34 по команде блока автоматики 27, связанного с лазерной интерферометрической измерительной системой 29, 31 перемещения рабочего стола 6.Перемещение рабочего стола на подшипниках 6 по направляющим 4 осуществляется с помощью штока 12, соединенного с поршнем 13 основного цилиндра 14, масло в рабочую полость которого поступает из резервуара 16 по каналу 16 при открытом дросселе 17 и золотнике 18. Команда на открытие золотника 18, управляемого электромагнитом 19, поступает из блока автоматики в начале работы, Величина перемещения стола 6 измеряется лазерным измерителем перемещений 29, 31 и фиксируется реверсивным...
416214

Номер патента: 416214
Опубликовано: 25.02.1974
МПК: B23Q 16/00, G05B 19/00
Метки: 416214
...пультс управления станком и состоит 15 из валика 9 с фиксатором 10, маховичком 11и кодовым барабаном 12. Кодовыи барабан имеет одно питающее кольцо и ряд кодовых колец по числу разрядов, определяемым заданным числом координат. Каждое кольцо 20 имеет коп гактпчо щетку 13, посредствомторой сигнал с кодового барабана передается для сравнения с сигналом датчика 4.Барабан 14 с цифрами служит для визуального наблюдения за положением кодового 25 барабана.Для обработки изделия па станке с даннойсистемой управления производятся следующие операции. Согласно чертежу изделия определяют координать осей отверстий, подлежащих 50 обработке, и соответственно расставляютсябвсконтакпные упоры столаи шпиндельныхтоловок. Определяют последовательность обхода...
Система программного управления перемещениями рабочего стола металлообрабатывающих станков

Номер патента: 421466
Опубликовано: 30.03.1974
МПК: B23H 7/20, G05B 19/00
Метки: металлообрабатывающих, перемещениями, программного, рабочего, станков, стола
...киноленты. Взависимости от того, кис шестерни дифференциала находятся в зацеплегппг, направление движения ленты либо встречно движению щелей датчик, лиоо согласно, Свет нафотодиоды попадает в том случае, когда и дспгифратору подходит отверстие в программоносителе. Совет проходит через ту щель, которая совпадает с отверстием в ленте. СПУ получает при этом сигнал о перемещении рбочсго органа в конечную точку траектории.Длина отрезка, задаваемого програмиогг,должна быть кратной шагу датчика положения.При ооработке контура подачи станка рботают поочередно.При работе одной подачи, например, продольнои 2, в дешифратор 10 этой подачи вводится программоносптель 14 до момента, когда к дешифратору подойдет отверстие.Сигнал дешифратора...
Способ программирования обработки деталей последовательно несколькими инструментами

Номер патента: 424115
Опубликовано: 15.04.1974
Автор: Сырнев
МПК: G05B 19/00
Метки: инструментами, несколькими, последовательно, программирования
...программируемых технологических остановов для смены инструмента корректируют с учетом получения последовательных автоматических остановок даниого лимба по программе на цифровых отметка.с 2, 3 и и. д., соответственно показывающих;порядковый номер очередной смены,инструмента для продолжения обработки деталей по следующей части рабочей программы.По данному способу программирование обработки деталей последовательно несколькими инструментами начинают, как и по известному способу, с определения последовательности и технологически.с характеристик всех рабочих ходов, после чего назначают исходное положение рабочего органа и предва 1 ительно намечают точки всех его,последующих положений при программируемых технологических остановах станка...
Способ управления двумя следящими приводами

Номер патента: 463099
Опубликовано: 05.03.1975
Авторы: Аблавский, Кондратьев
МПК: G05B 19/00
Метки: двумя, приводами, следящими
...представлена блок-схема устройства, реализующего предлагаемый способ,Блок-схема включает элементы 1 и 2, дифференцирующие сигналы с 1 и П каналов управления; коммутаторы 3 и 4 сигналов компенсации скоростной ошибки; блоки 5 и б выделения второй производной входного воздействия, равной бссконсчностн; следящие приводы 7 и 8; датчики 9 и 10 скорости прпводов.Блок 5 выдает сигнал на коммутатор 3,олько прп одновременном появлении сигналавходного воздействия, имеющего вторую пронзводную, равную бсскопе гностп, в канале 1,н сигнала, равного ну:по п,ш имеющего постогнно" значение, и канале 11. Блок б выдаетспгпал па ком.д татор 4 только при одноврс,сш;о:. появлении спгнала входного воздейст".6Составитель А, Арапов Тсхред Т. 1 Чироиов Корректор...
Устройство для числового программного управления станками

Номер патента: 472331
Опубликовано: 30.05.1975
МПК: G05B 19/00
Метки: программного, станками, числового
...рассогласования и контура автоматической отработки сигнала рассогла сования. На чертеже показана блок-схема аемого устройства для числового пр р ого управления станками.Устройство содержит пульт управления 1, предназначенный для управления первым шаговым двигателем 2, который через первую кинематическую цепь 3 воздействует на первый вход датчика рассогласования 4, Датчик 4 предназначен для выработки сигнала, который с помощью контура 5 автоматической отработки сигнала рассогласования, второго шагового двигателя 6 и второй кинематической цепи 7, способной воспринимать значительные усилия, управляет перемещением исполнительного органа 8, связанного с вторым входом датчика 4. Датчик 4 может быть выполнен, например, в виде индуктивного...
Устройство для программного управления автооператором гальванической линии
Номер патента: 511567
Опубликовано: 25.04.1976
Автор: Гренадер
МПК: G05B 19/00
Метки: автооператором, гальванической, линии, программного
...перемещений и дешифратором 3 вертикальныхперемещений, Прямые и инверсные входыдешифратора 1 соединены с датчиками 4загрузки рабочих позиций. Выходы 5 дешифратора .". соединены с прямыми входамидешифраторов 2 и 3, Датчики 6 положежения автооператора над рабочими позициями соединены с инверсными входамидешифратора 2 горизонтальных перемещений и с прямыми входами дешифратора 3вертикальных перемещений, Датчики 7вертикального положения автооператорасоединены, наоборот, с прямыми входамидешифратора 2 и инверсными входами дешифратора 3. бочин позиций соответствующее очередной транспортной операции,Допустим, эта операция заключаетсяв переносе кассеты с первой рабочей позиции на вторую рабочую позицию, а предыдущая закончилась загрузкой...
Блок управления для запоминающего устройства

Номер патента: 637786
Опубликовано: 15.12.1978
Авторы: Липовецкий, Осипенко, Проценко, Хоменко, Чекалкин
МПК: G05B 19/00, G11C 19/00
Метки: блок, запоминающего, устройства
...информации (цли ЗУ), при этом в цем подключаются накапливающие линейки с временем задержки (длиной), соответствующим перйоду повторения управляющих импульсов следующих с частотой 11.Устройство обработки информации при этом осуществляет накопление сигналов, поступающих на его вход с частотой, синхронной частоте управляющих импульсов 11. На вы- зО ходе вырабатывается сигнал обнаружения,Через элемент 8 и элемент ИЛИ 9 на нулевой вход триггера 2 подается управляющий импульс, вырабатываемый на выходе 15 регистра 1. Этим импульсом триггер 2 возвращается в исходное нулевое состояние и запрещает прохождение через элемент 3 импульсов сдвига на устройство обработки цц.формации.Следующий управляющий импульс, который поступает с шины 13 на...
Устройство для числового программного управления дыропробивным прессом

Номер патента: 688893
Опубликовано: 30.09.1979
Авторы: Тавадзе, Хацкевич, Цибадзе, Чачанашвили
МПК: G05B 19/00
Метки: дыропробивным, прессом, программного, числового
...координатам Х и У, поочередно поступает на преобразователь 8 кодов в СОК, Ицформаггия, представленная в кодах СОК, из преобразователя 8 записывается поочередцо в регистры оперативной памяти, число разрядов которьгх равно гг+1 (г=1,2 и+1). Модульные реверсивные счетчики импульсов, работающие по модулям СОК р 1, р 2, , рва 1, подсчитывают импульсы, поступагощие от импульсных датчиков 8, 9 координат, которые выдают через каждую единицу перемешеция (дискрету) по одному импульсу. Блоки 10 и 11 при совпадении содержимого регистров 4 г - 4- г и 5 г - 5,+г ги счетчиков 6, - 6. г и 7, - 7.г выдают команды через триггеры 12 и 18 на останов соответствующих приводов стола пресса по координатам Х и У,Блок 14 обеспечивает выбор нужного...
Устройство для программного управления

Номер патента: 690443
Опубликовано: 05.10.1979
Автор: Аксенов
МПК: G05B 19/00
Метки: программного
...изменяющиеся по длительности и полярности, управляющие воздействия. Эти воздействия анализиру:отся н блоке 14 с воздействиями, поступающими с блока 22, При совпадении управляющих воздействий на входе блока логических схем, с его выхода на один из выходов коммутатора 15 выдается управляющее воздействие, которое управляет выходным искробезо. пасным коммутационным устройством соответствующего привода, выбранного блоком 17 через блок синхронизатор 18, Это устройство через исполнительный механизм в блоке исполнительных механизмов 16 управляет соответствующим исполнительным органом объекта управления.При равенстве заданной и Фактической неличины на входах блока сравнения 13 и на его выходе управляющее воздействие становится равным О....
Устройство для записи программы промышленным роботом

Номер патента: 706823
Опубликовано: 30.12.1979
Авторы: Бондаренко, Загребельный, Куценко, Пастушенко, Сергацкий, Тимченко
МПК: G05B 19/00
Метки: записи, программы, промышленным, роботом
...определения кратных интервалов подключены к выходам датчиков перемещения исполнительного органа.На чертеже представлена функциональная схема устройства.Она содержит блок 1 обучения,приводы 2 исполнительного органа,датчики 3 перемещения исполнительного органа,исполнительный орган 4,вычислительный блок 5, блок 6 йамяти706823 Формула изобретения 35 Заказ 8221/41 5 Подписное ЦНИИТираж Филиал г.ужго Патент,лПроектная,блок 7 определения кратных интервалов, блок 8 индикации.,Устройство работает следующимобразом.Оператор, нажимая органы управ -ления блока 1 обучения, приводитв движение приводом 2 исполнительныйорган 4,"который перемещается приблизительно в желаемую точку траектории. При этом сигналы от датчиков 3перемещения поступают в...
Устройство для программного управления промышленным роботом

Номер патента: 718835
Опубликовано: 29.02.1980
Авторы: Давиденко, Линкин, Сергацкий
МПК: G05B 19/00
Метки: программного, промышленным, роботом
...3 регулируемой частотыпоступают при этом через ключ 5 в блок 1памяти, откуда с той же частотой на приво щды 2 робота йодаютсм "сигналы программы. Одновременно импульсы генератора 3 дрегулируемой -частбты поступают на преобразователь 8 частота - Ъйд," с выхода ко-ГЙ /АР б ттЕЮ 1 йт "Йих передача в блок 6 памяти.В процессе воспрбизведения программыкоординатных перемещений, записанной вблоке 1 йамяти;" в- завйсимостй от техноло-гических требований, например при подборе 20требуемои скоростй сваркй;регулируютскорость перемещения рабочего органа на = участках траектории движения, в качествекоторой может быть линия сварки. Это регулйроъайие осуществляется за счет изме=ненйя скбростй сФтывайия "программы изблока 1" памяти" с "помощью генератора...
Устройство для управления производственным процессом ремонта машин

Номер патента: 723511
Опубликовано: 25.03.1980
МПК: G05B 19/00
Метки: машин, производственным, процессом, ремонта
...3 управляющему сигналу информация о количестве имеющихся в наличии изделий данного шифра перезаписывается во второй регистр 7. В схему вычитания 6 из первого регистра 5 поступает информация о требуемом количестве изделия, а из второго регистра 7 - о фактическом на. личин (выпуске) этого изделия. В схеме 6 осуществляется вычитание из содержимого второго регистра содержимого первого регистра. Если разность получается не отрицательной, чго свидетельствует о наличии необходимого количества данного комплектующего изделия, то результат вычитания засылается в блок 4. При отрицательной разности из схемы 6 в блок 3 управления поступает сигнал, и блок 3 вырабаты. вает управляющие импульсы в блок 2 формирования задания цехам-поставщикам, в ответ...
Цикловая система программного управления манипулятором
Номер патента: 723512
Опубликовано: 25.03.1980
Авторы: Дорошев, Литовченко
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
...блок 9 блок 10 датчиков положения, блок 11 приводов манипулятора.5Устройство работает следующим образом.Сигналы генератора 1 импульсов подаются на распределитель 2 импульсов, подключенный , к программному блоку З,выполненному и ви. де штеккерной панели, на которой. с помощью 10 коммутационных элементов набрана программа последовательности выполнения команд, Сигналы, считанные со штеккерной панели 3, посту.пают в блок 4 триггеров,с выходов которого через блок 5 элементов И и формирователь 6 15 исполнительных сигналов поступают на блок 11 приводов манипулятора. Одновременно с этимсигналы с выходов формирователя 6 поступают в блок 7 сумматоров, на другие входы которого поступают сигналы с дополвтельного 20 ряда коммутационных...
Способ управления движением промышленного робота

Номер патента: 729552
Опубликовано: 25.04.1980
МПК: G05B 19/00
Метки: движением, промышленного, робота
...значительно повысить точность стабилизации скорости движения рабочего органа робота при использовании оборудования неортогональной струк- турыа Формула изобретения Источники информации,принятые во внимание при экспертизе1. Проспект фирмы Сименс навыставке технологического оборудования в Ганновере 1973, Система81 пцшег 1 ЕК,2. Способы подготовки программи интерполяторы для контурныхсистем числового управления станками, М Машиностроение, 1970,с.88-93. Составитель Г.МилославскийРедактор Л,Гребенникова Техрел Н. Бабурка КорректорЯ,Веселовская Заказ 1259/40 Тираж 956 Подписное ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Филиал ПП 1 Патент, г. Ужгород, улПроектная, 4 Это...
Система программного управления манипулятором
Номер патента: 742875
Опубликовано: 25.06.1980
Авторы: Андреенко, Ворошилов, Петров
МПК: G05B 19/00
Метки: манипулятором, программного
...с программной ленты блока записи програмвь 2 блоком считывания 3 и вводитсяв блок оперативной памяти 4. Из блока оперативной памяти 4 информацияпоступает в схемы управления приоритетным и неприоритетным движениями,В схеме управления приоритетнымдвижением информация поступает в блоксравнения кодов 16, преобразуется всигнал упраьления в преобразователь17 и усиливается в усилителе мощности 18, Сигнал управления поступаетна третий двигатель 19, который привОдит в движение механизм 15 с приемником излучения 12,Движение механизма 15 вызываетперераспределение интенсивности излучения в качестве которого могутбыть использованы свет,-излучение,луч лазера и им подобные, источники11, падающие на приемник 12, Сигналы с приемника 12 поступают во...
Система программного управления для робота-манипулятора
Номер патента: 744456
Опубликовано: 30.06.1980
Авторы: Антоненко, Сергацкий, Федоров
МПК: G05B 19/00
Метки: программного, робота-манипулятора
...преооразователь 11, поступают па первый блок памяти 7, который подключен к регулируемому усилителю 9 и устанавливает на нем коэффициент усиления, пропорциональный величине перемещения, зафиксированной в счетчике 12. Сигналы нуль-органа 10, подключенного к цифро-аналоговому преобразователю 11, поступают на один пз входов элемента И 6, Сигнал, пропорциональный величине необходимой контурной скорости сварки, устанавливается оператором в блоке эталонного сигнала 15 перед началом обучения и поступает на блок 14 коррекции скорости, После того как информация о перемещении между точками зафиксирована в реверсивном счетчике 12, она переносится во второй блок памяти 3, При подаче команды Запись блок заданпя скорости 8 вырабатывает...
Интерактивная система управленияроботом

Номер патента: 798713
Опубликовано: 23.01.1981
МПК: G05B 19/00
Метки: интерактивная, управленияроботом
...26 силы равен нулю. Сигнал датчика 15 момента пропорционален внутренним силам нагрузки. Исполнительный орган 30 нагружен внешнейсилой (сила веса транспортируемого е 0груза). Сигнал датчика 16 моментапропорционален внешней и внутреннимсилам нагрузки. Коэффициенты передачи датчиков 15, 16 момента по выходам выбраны таким образом, что 65 сигналы, обусловленные внутренними силами нагрузки на задающем 29 и исполнительном 30 органах, взаимно компенсируются и напряженйе на выходе датчика 16 момента пропорционально разности только внешних сил нагрузки. Кроме этого датчики 15, 16 моментов через пропорционально-дифференциальные регуЛяторы 19, 20, усилители 9, 10 управляют двигателями 11. 12 таким образом, что моменты, создаваемые двигателями...
Устройство для управления перемещениемисполнительного органа

Номер патента: 802930
Опубликовано: 07.02.1981
Авторы: Крылов, Маранцман, Рашкович, Шифрин, Шкловский
МПК: G05B 19/00, G05B 19/04
Метки: органа, перемещениемисполнительного
...в зоне обработки фаза сигналов на выходе сельсиновзадатчиков исполнительного органа 2 и 3 соответствет выключенному состоянию усилителей 4, 5 транзисторов 9,10. При выходе исполнительного органа иэ зоны обработки, при прохождении сельсином-датчиком положения 1 через согласованное положе802930 О 15 25 30 35 ние с сельсином-задатчиком 2 происходит переворот фазы сигнала иавыходе сельсииа-задатчика 2, включается транзистор 9 усилителя 4,поступает команда на реверс, Аналогично при движении рабочего органав противоположном направлении происходит переворот фазы сигнала сельсина-задатчика 3 и включается транзистор 10 фазового усилителя 5, поступает команда на реверс в противоположном направлении.Как видно из схемы, здесь отсутствует взаимное...
Цикловая система программногоуправления промышленным роботом
Номер патента: 807212
Опубликовано: 23.02.1981
Авторы: Гаврилова, Зверев, Кнауэр, Шор
МПК: G05B 19/00
Метки: программногоуправления, промышленным, роботом, цикловая
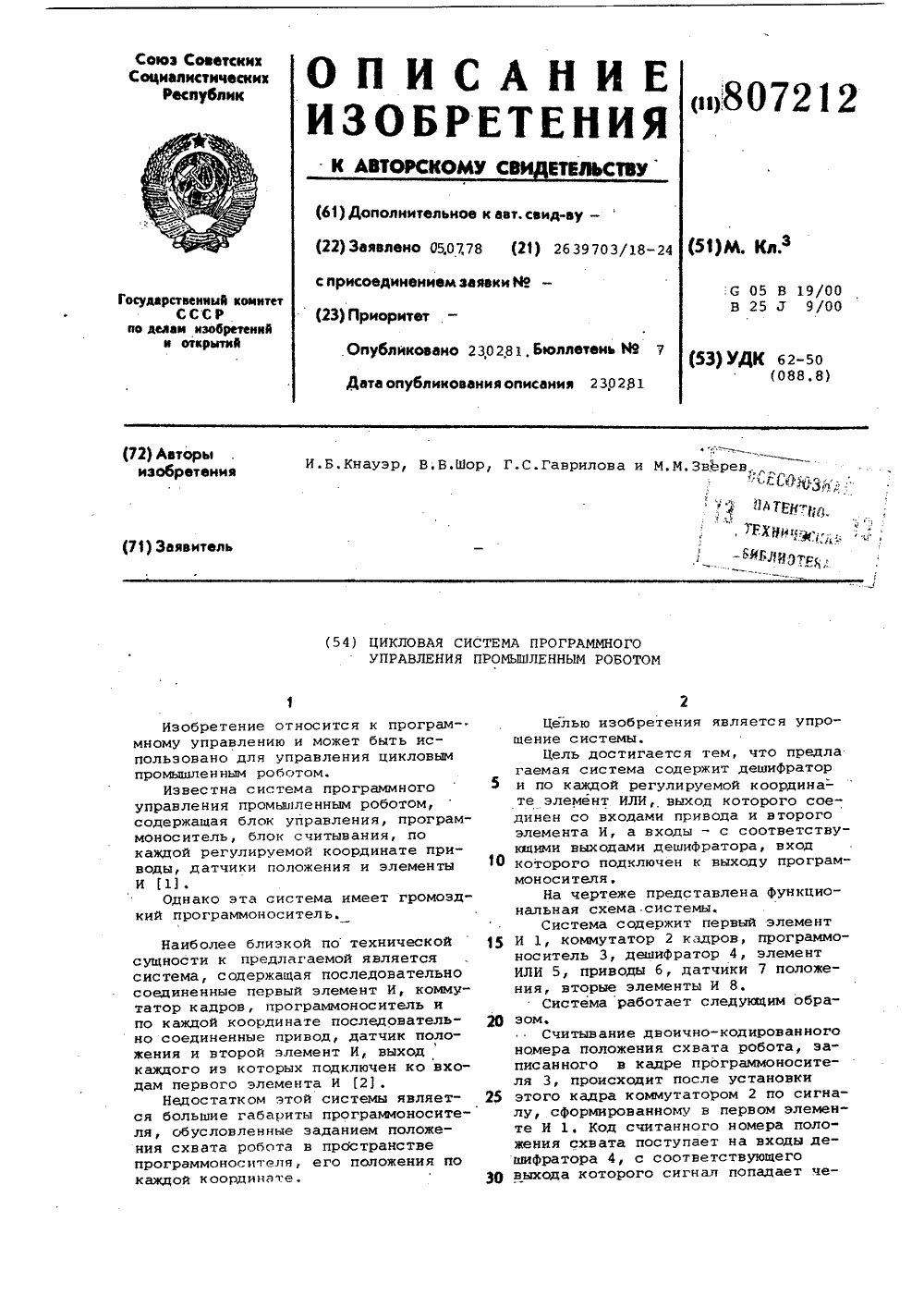
...подключен к выходу программоносителя,На чертеже представлена функциональная схема системы.Система содержит первый элемент15 И 1, коммутатор 2 кадров, программоноситель 3, дешиФратор 4, элементИЛИ 5, приводы б, датчики 7 положения, вторые элементы И 8,Система работает следукщим обра 20 эом.Считывание двоично-кодированногономера положения схвата робота, записанного в кадре программоносителя 3, происходит после установки25 этого кадра коммутатором 2 по сигналу, сформированному в первом элементе И 1. Код считанного номера положения схвата поступает на входы дешифратора 4, с соответствующего3 О выхода которого сигнал попадает че807212 Формула изобретения Заказ 281/69 Тираж 951 Подписное И ПП "Патент Фили Ужгород, ул. Проектная рез...
Система программного управленияпромышленным роботом
Номер патента: 807213
Опубликовано: 23.02.1981
Авторы: Агапов, Зверев, Кнауэр, Скрипка, Шор
МПК: G05B 19/00
Метки: программного, роботом, управленияпромышленным
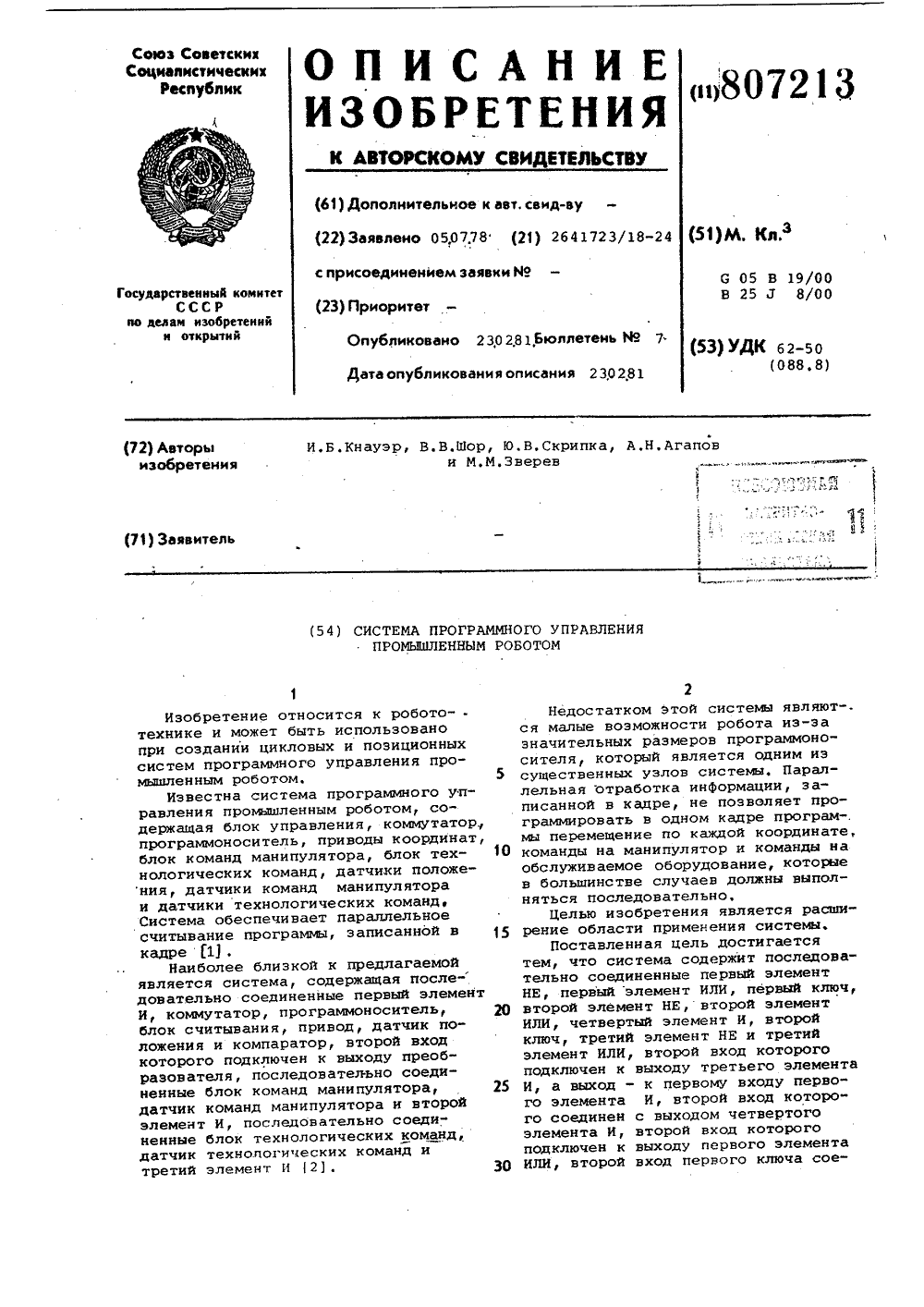
...17, первыйэлемент НЕ 18, второй элемент НЕ 19,третий элемент НЕ 20, первый элементИЛИ 21, второй элемент ИЛИ 22, третийэлемент ИЛИ 23.Система работает следующим образом.Считывание кадра и программ,.набранного на программоносителе 3,происходит после его установки коммутатором 2 по сигналу с выхода первогоэлемента И 1.Исполнение считанного кадра проис- З 5ходит последовательно, Сначала отрабатываются перемещения по координатам, затем команды манипулятора и далее технологические команды.Цля этого на выходе блока 4 считывания включены первый и второй ключи 5 и 6,Выход первого ключа 5 блокируется до момента появления разрешающего уровняна выходе компаратора 10, Разрешающий сигнал поступает с выхода компаратора 10 при совпадении уровня...
Способ программирования движенийпромышленного робота
Номер патента: 807214
Опубликовано: 23.02.1981
Авторы: Белов, Великович, Житомирский, Канаев, Козырев, Остапчук
МПК: G05B 19/00
Метки: движенийпромышленного, программирования, робота
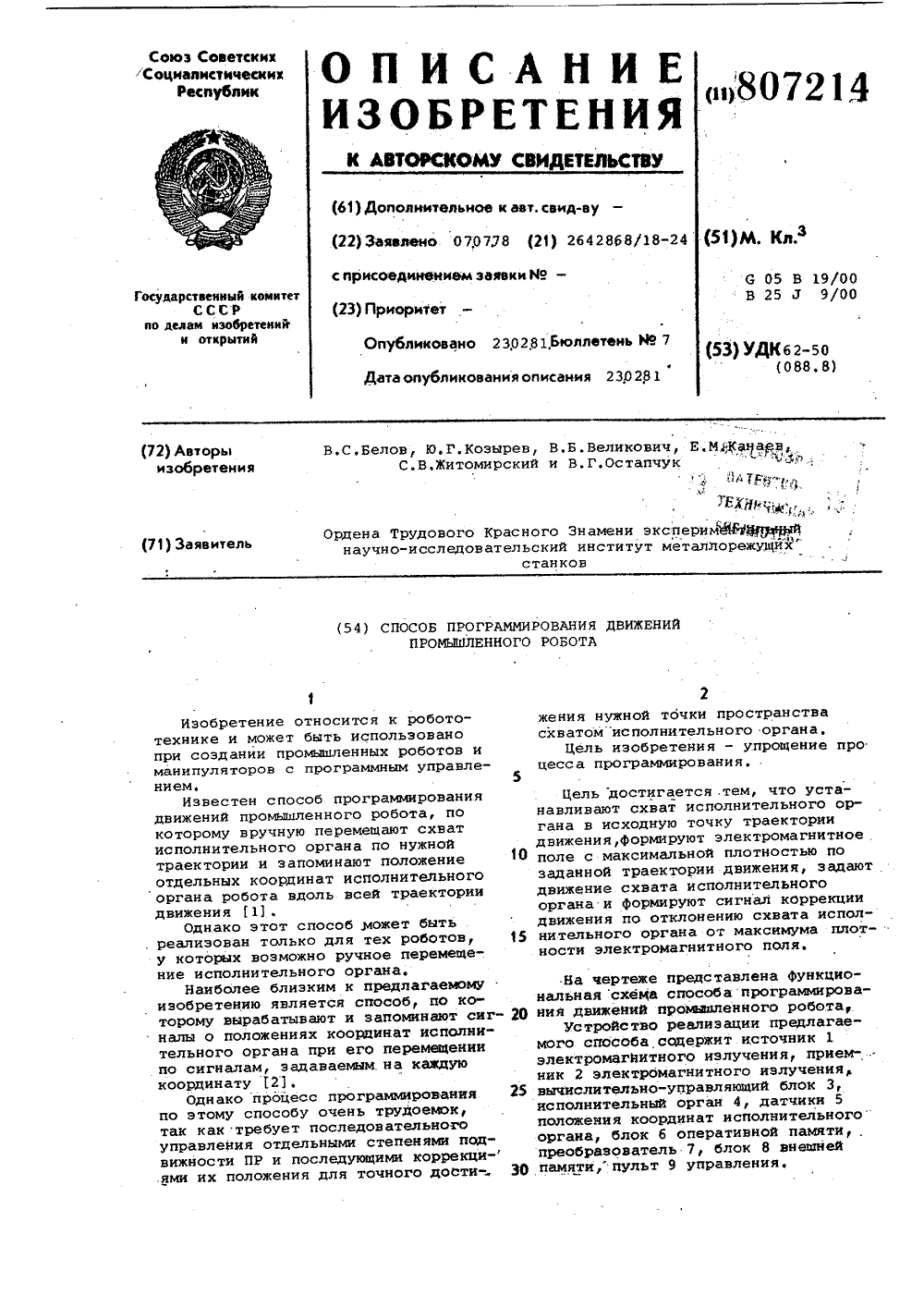
...органа, блок б оперативной памяти преобразователь 7, блок 8 внешней памяти,пульт 9 уйравления.807214 Формула изобретения Составитель Е. Политовазаренко Техред М. Лоя Редакто к ома Коррект Заказ 281/69ВНИИПИпо113035 р Мо Тираж 951осударственного комитета С лам изобретений и открытий ва, Ж, Раушская наб д Подписное иал ППППатент , г.ужгород, ул.Проектная, 4 Ф Устройство, в котором реализуется предложенный способ, работаетследующим образом,Выбирают необходимую траекториюперемещения схвата исполнительногооргана 4 и включают источник 1 электромагнитного излучения, максимальная плотность излучения которогосовпадает с выбранной траекторией,По командам с пульта 9 управленияосуществляют перевод схвата исполнительного органа 4 в...
Устройство для программногоуправления многокоординатнымманипулятором

Номер патента: 807215
Опубликовано: 23.02.1981
МПК: G05B 19/00
Метки: многокоординатнымманипулятором, программногоуправления
...из блока 5 управления, поступающей на вход распределителя 11 импульсов, последний вырабатывает группу импульсов, под воздействием которых информация с выхода блока б обучения через первый коммутатор 13 записывается в запоминающий блок 1.При записи не нулевых значений вели- .чин перемещений выходной сигнал блока10 селекции разрешает прохожцение импульсов с выхода блока 5 управления 40через элемент запрета 12, Выходнойсигнал элемента 12 запрета черезэлемент ИЛИ 8 переключает счетчик7 адреса, подключающий для записиочередную ячейку блока 1 памяти, Момент переключения адреса выбираетсясинхроимпульсом, поступающим изблока 5 управления на прямой входэлемента 12 запрета. Если же значениевеличины перемещения по некоторой ко- оординате равно...
Устройство для записи программыуправления промышленным роботом

Номер патента: 807216
Опубликовано: 23.02.1981
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
...12.Недостатком известного устройст является большое время записи программы для прямолинейных участков траектории в случае позиционного и рамкив бло- прии пеочку т пере полотся в четчики8072)Ь Формула изобретения Заказ 281/69 Тираж 951 Подписное ВНИИПИ Филиал 1 П 1 П "Патент", г, Ужгород, ул. Проектная,4 Ь, По окончании совмещения исполнительного органа 4 с первой точкой результат перемещения, занесенный в реверсивные счетчики Ь, по команде с блока 1 управления через вычислительный блок 7.поступает в блок 8 памяти. После этого оператор с по- помощью блока 2 обучения перемещает Исполнительный орган 4 в следующую точку заданной траектории. Если после записи положения исполнительного органа 4 в первой точке очередной участок траектории...
Устройство для записи программыуправления промышленным роботом
Номер патента: 807217
Опубликовано: 23.02.1981
Авторы: Губина, Загребельный, Куценко
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
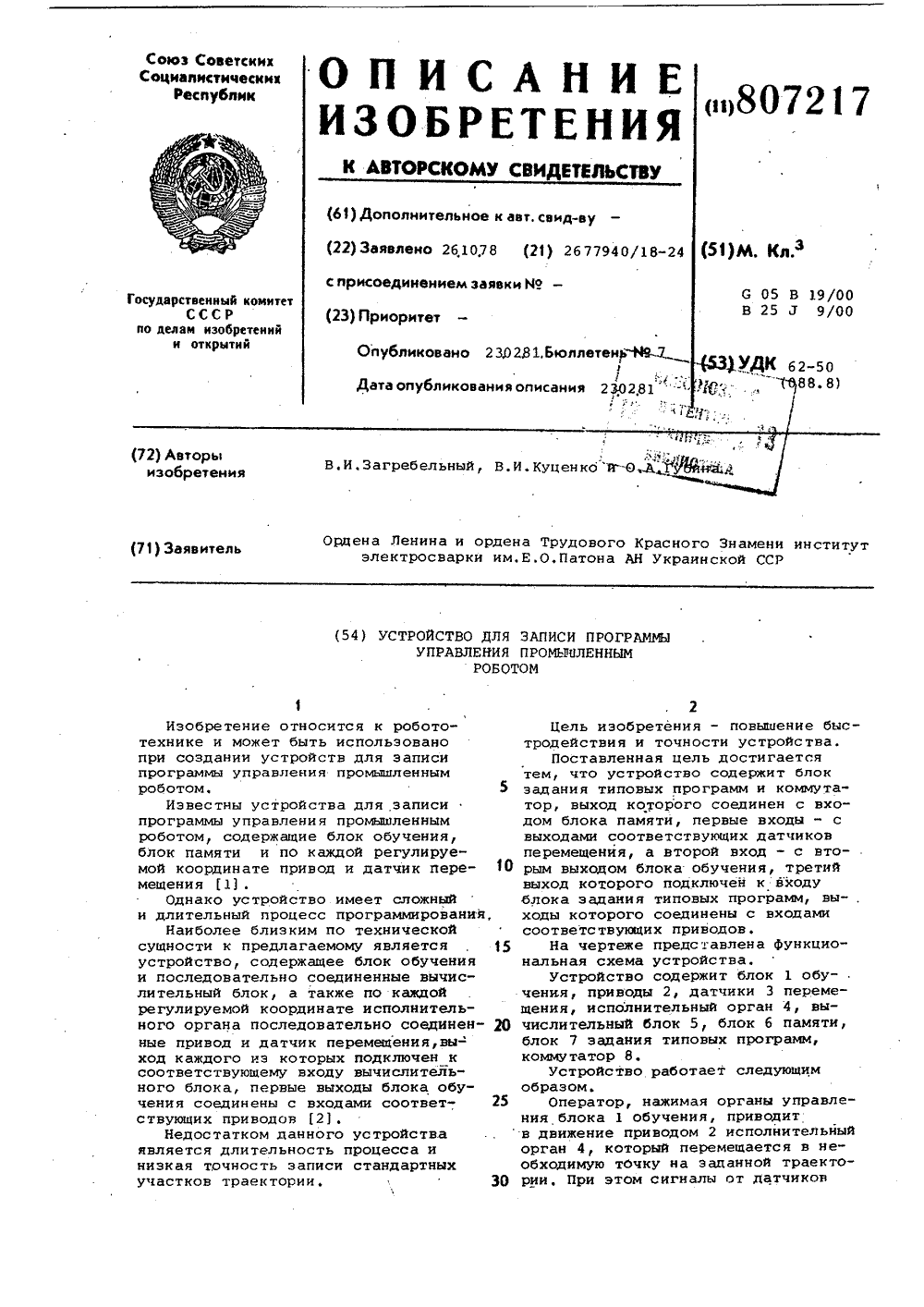
...исполнительный орган 4, вычислительный блок 5, блок 6 памяти,блок 7 задания типовых программ,коммутатор 8,Устройство работает следующимобразом,Оператор, нажимая орния блока 1 обучения, приводитв движение приводом 2 исполнительныйорган 4, который перемещается в необходимую тОчку на заданной траектории. При этом сигналы от датчиков8 О 721 г формула изобрет.ниц 1 69 Тираж 951 Подписно НИИПИ каз илиал ППП "Патент, г. Ужгород, ул. Проектна 3 перемещения поступают в вычислительный блок 5 и далее в блок б памяти, Так осуществляется запись программы для нетиповых участков траектории. Если же непосредственно за точкой записи следует типовой участок траектории, то оператор с помощью блока обучения подключает блок 7 задания типовых программ,...
Устройство для записи программыуправления промышленным роботом
Номер патента: 811203
Опубликовано: 07.03.1981
Авторы: Гудима, Кожухарь, Маличенко, Сергацкий, Спыну, Тимченко
МПК: G05B 19/00
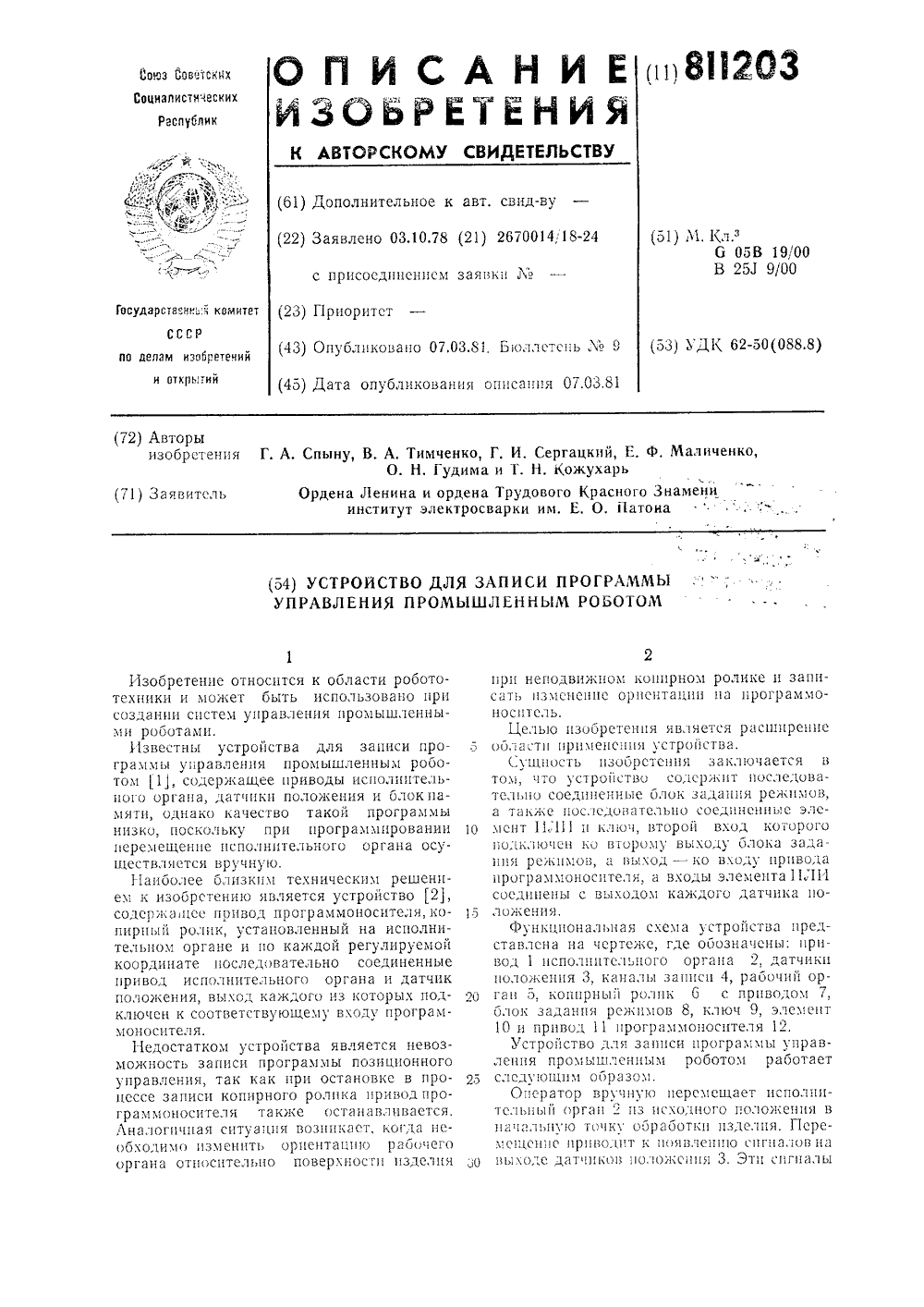
Метки: записи, программыуправления, промышленным, роботом
...12. Пос;Ее достижени 5 коцируеОЩим 1 эоликом 6 поверхности изделия оператор с; омощыо блока задания режимов 8 включает приводы 7 и 11 коцирного рог)ика 6 и )ЕрсеграэЕоносителя 12, задав предварительно требуемую скорость перемещеня. Оинхроцизация работы приводови 11 может оыть обеспечена как путем задания сигналов управления от одного переключателя блока задания ре 5)симов 8, так и соединением их с помощью э:Еектрического валя, 11 рижимая копирный ролик 6 к изделию, оператор осуществляет перемещение рабочего органа 5 цо заданной траектории, например цо линии сварного соединения, окрашиваемой поверхности и т. д, Перемещение исполнительного органа 2 с рабочим органом 5 вдоль заданной траектории осуществляется за счет сил трения между...