Патенты с меткой «цикловая»
Цикловая система программного управления манипулятором

Номер патента: 621569
Опубликовано: 30.08.1978
Авторы: Кнауэр, Майский, Чумаков, Шор
МПК: B25J 9/00
Метки: манипулятором, программного, цикловая
...координат, то через блок 3 считываниявключается привод 8 транспортирующихкоординат. Рабочий орган транспортирующих координат начинает двигаться, и датчик 9 транспортирующих координат, размыкаясь, выдает нулевой сигнал на элемент И14. Следовательно, на коммутатор 2 поступает сигнал 0. По окончании движениярабочего органа манипулятора, датчик 9 20транспортирующих координат, замыкаясь,выдает единичный сигнал на элемент И 14.Сигнал 1 подается в коммутатор 2, который коммутирует новую строку программы блока памяти. 25В случае появления единичного сигналана входе блока 1 памяти по каналу ориентирующих координат, блок 3 считываниявключает привод 7 ориентирующих координат и посылает сигнал 1 на инвертор 4 иблок 5 задержки и далее...
Цикловая система управления промышленным роботом
Номер патента: 648943
Опубликовано: 25.02.1979
Авторы: Белов, Гаврилова, Зверев, Кнауэр, Чиганов, Шор
МПК: G05B 11/01
Метки: промышленным, роботом, цикловая
...дешифратор и второй элемент И, второй вход которого подключен ко второму выходу блока памяти, а выход - ко входу привода, а выход датчика торможения соединен со входом генерагора импульсов,На чертеже дана фума системы.Система содержит кблок 2 памяти, приводжения, первый элементторможения, генераторчик 8, дешифратор 9, в10,3 ",. 6489%ЪИъ.Устройство рабогаег следующим образомеИз блока 2 памяти сигнал поступает на привод 3 и первый элемент И 5. При йодходе рабочего органа.к датчику 6 5торможения сигнал с датчика 6 торможения запускает генератор 7 импульсов, с выхода которого импульсы поступают нц вход счетчика 8 импульсов и далее на дешифратор 9, с выхода которого кодированный сигнал поступает на входвторого элемента И 10, на другой...
Цикловая система программного управления манипулятором
Номер патента: 723512
Опубликовано: 25.03.1980
Авторы: Дорошев, Литовченко
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
...блок 9 блок 10 датчиков положения, блок 11 приводов манипулятора.5Устройство работает следующим образом.Сигналы генератора 1 импульсов подаются на распределитель 2 импульсов, подключенный , к программному блоку З,выполненному и ви. де штеккерной панели, на которой. с помощью 10 коммутационных элементов набрана программа последовательности выполнения команд, Сигналы, считанные со штеккерной панели 3, посту.пают в блок 4 триггеров,с выходов которого через блок 5 элементов И и формирователь 6 15 исполнительных сигналов поступают на блок 11 приводов манипулятора. Одновременно с этимсигналы с выходов формирователя 6 поступают в блок 7 сумматоров, на другие входы которого поступают сигналы с дополвтельного 20 ряда коммутационных...
Цикловая система программногоуправления промышленным роботом
Номер патента: 807212
Опубликовано: 23.02.1981
Авторы: Гаврилова, Зверев, Кнауэр, Шор
МПК: G05B 19/00
Метки: программногоуправления, промышленным, роботом, цикловая
...подключен к выходу программоносителя,На чертеже представлена функциональная схема системы.Система содержит первый элемент15 И 1, коммутатор 2 кадров, программоноситель 3, дешиФратор 4, элементИЛИ 5, приводы б, датчики 7 положения, вторые элементы И 8,Система работает следукщим обра 20 эом.Считывание двоично-кодированногономера положения схвата робота, записанного в кадре программоносителя 3, происходит после установки25 этого кадра коммутатором 2 по сигналу, сформированному в первом элементе И 1. Код считанного номера положения схвата поступает на входы дешифратора 4, с соответствующего3 О выхода которого сигнал попадает че807212 Формула изобретения Заказ 281/69 Тираж 951 Подписное И ПП "Патент Фили Ужгород, ул. Проектная рез...
Цикловая система программного управления промышленным роботом
Номер патента: 935877
Опубликовано: 15.06.1982
МПК: G05B 19/00
Метки: программного, промышленным, роботом, цикловая
...93Это является недостатком системы,так как ве 4 ет к увеличению потребления энергопитания приводов и соответственно к снижению ресурса их работы и надежности системы в целом,Цель изобретения - повышение на.-,дежности и снижение энергопотдебления системы.Сущность изобретения заключаетсяв том, что система содержит по каждой регулируемой координате инвертор и третий элемент И, через который выход элемента И подключен ковходу привода, а выход датчика положения через инвертор соедийен совторым входом третьего элемента И,На чертеже представлена функциональная схема системы,Система содержит первый элементИ 1, коммутатор 2 кадров, программоноситель 3, дешифратор 1, элементыИЛИ 5, третьи элементы И 6, приво,ды 7, датчики 8 положения,...
Цикловая система программного управления манипулятором
Номер патента: 1097971
Опубликовано: 15.06.1984
Авторы: Ермаков, Петров, Семенов, Соловьев, Трунин
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
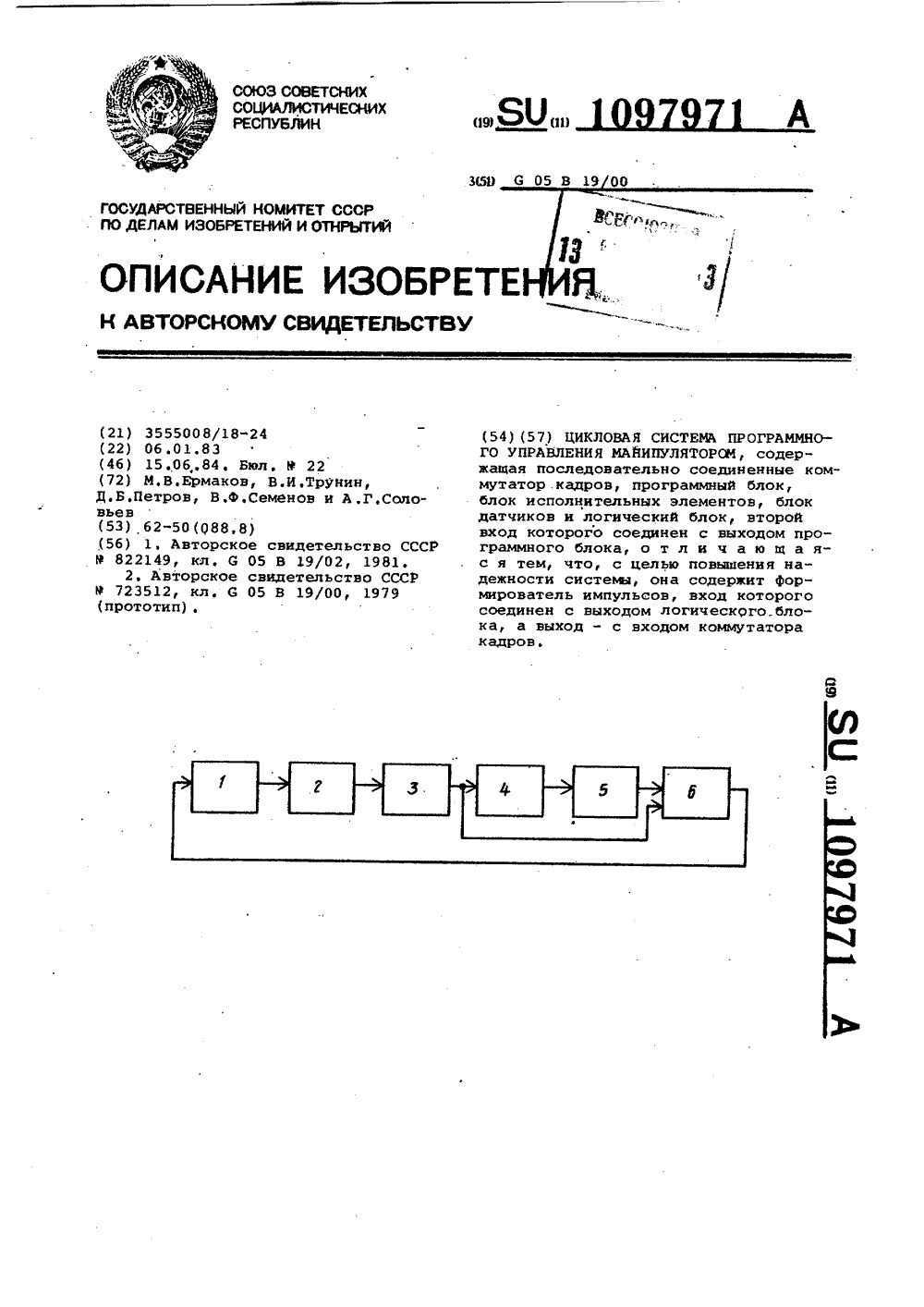
...коммутатор 2 кадров устанавливается иа первый кадр программа, например, сигналом исходной установки по включению питания. Программный блок 3 выдает соот ветствующую первому кадру команду на блок 4 исполнителъных элементов.При исправности исполнительного элемента, соответствующего команде первого кадра, и исправности контролирующего его датчика на выходе логик ческого блока б устанавливается уровень логической единицы. Через некоторое время, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момент времени С 1 срабатывает соответствующий датчик блока 5 датчиков и на выходе логического блока б появляется уровень логического нуля.Перепад сигнала логического блока б из состояния логической единицы в состояние...
Цикловая система программного управления промышленным роботом

Номер патента: 1151927
Опубликовано: 23.04.1985
Авторы: Аношкин, Афанасьев, Винник, Шевченко
МПК: G05B 19/00
Метки: программного, промышленным, роботом, цикловая
...по каждой регулируемой координате дополнительно КЬ-триггера и четвертого элемента И позволяет исключить выдачу разрешающего сигнала с выхода второго элемента И на вход первого элемента И по регулируемой координате схвата робота, в которой произошел отказ датчика положения.На чертеже представлена функциональная схема предлагаемой системы.Система содержит первый элемент И 1, коммутатор 2 кадров, программоноситель 3, дешифратор 4, элементы ИЛИ 5, третьи элементы И 6, приводы 7, датчики 8 положения, вторые элементы И 9, инверторы 10, четвертые элементы И 11, Ю-триггер 12.50 55 Выход первого элемента И 1 соединен через коммутатор 2 с программоносителем 3, выход которого через дешифратор 4 соединен с входами элемента ИЛИ 5 по каждой...
Цикловая система программного управления манипулятором

Номер патента: 1812100
Опубликовано: 30.04.1993
МПК: B25J 13/00, B25J 9/00
Метки: манипулятором, программного, цикловая
...частотой появляются прямоуголь- Во втором режиме работы на выходе ные импульсы,переключателя 12 изменяется логическийСчетчики 9 и 13 представляют собой уровень, в результате чего коммутатор 2 двоичные счетчики и могут быть выполнены, 50 блокируется от приема информации по пернапример, в качестве самостоятельных мик- вому информационному входу, но переклюросхем различных серий, например, чается на прием информации по вторымК 155 ИЕ 6. информационным входам, а дешифратор 10Дешифратор 10 выполнен, например, в начинает свою работу, периодически выдавите. самостоятельной схемы К 155 ИДЗ с инвая на каждый свой выход уровень логичеверсией выходных сигналов с помощью ло- ской единицы, тем самым разрешая гических элементов, а также может...