Устройство для записи программыуправления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 807217
Авторы: Губина, Загребельный, Куценко
Текст
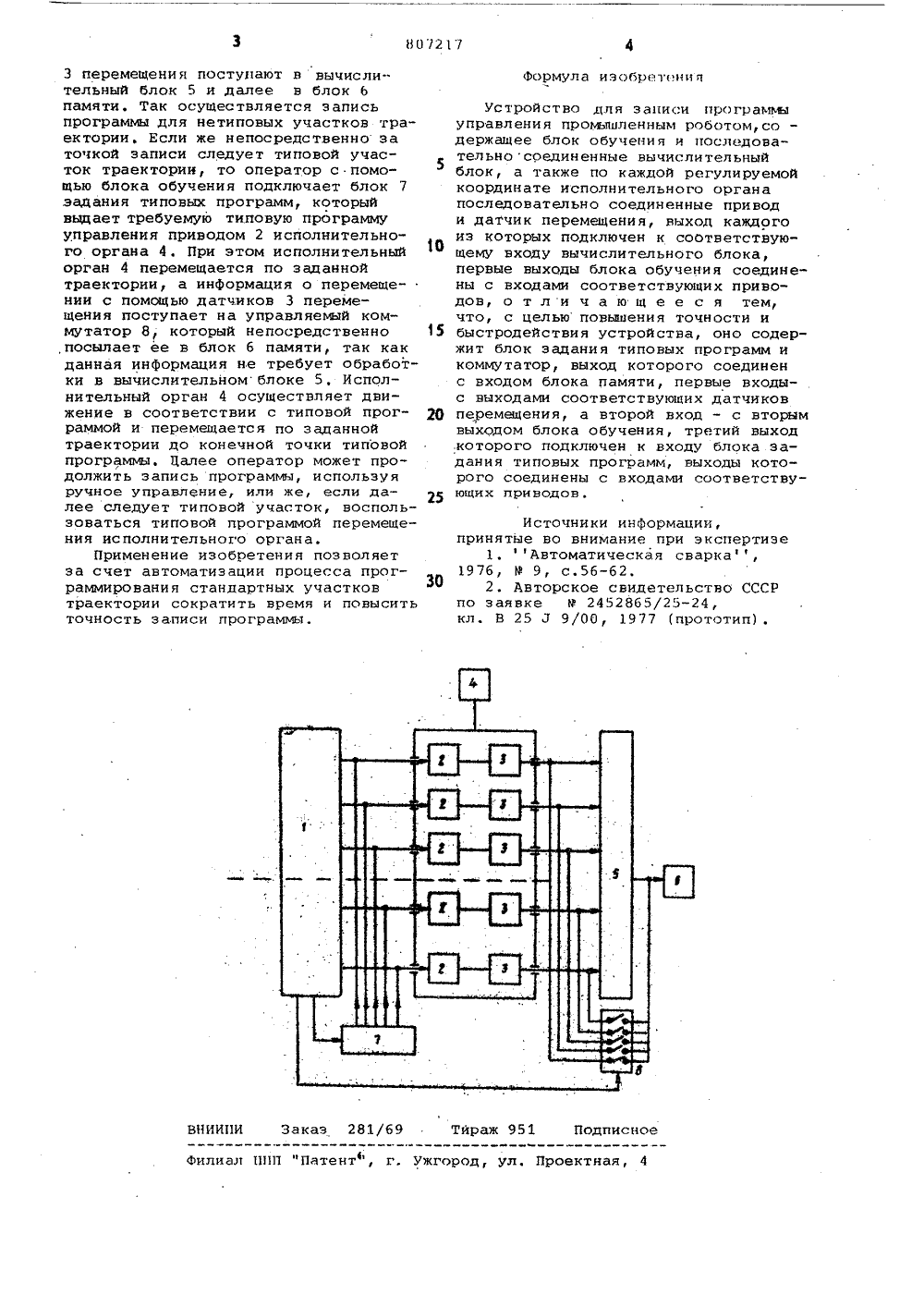
Союз Советских Социалнстнческмк Рвспублнк(51)М. Кл. с присоединением заявки М 9 -С 05 В 19/00 В 25 7 9/00 Государственный комитет СССР по делам изобретений и открцтий-ЩУДК 62-50 п " (88. 8) 2) Авторыизобретения В, И, Загребельный, В. И. Куц Ленина и ордена Трудового Красного Знамени институектросварки им.Е.О.Патона АН Украинской ССР О) УСТРОЙСТВО ДЛЯ ЗАПИ УПРАВЛЕНИЯ ПРОМЬРОБОТОМПРОГРАММЫЕННЫМ и п ганы управле 3 Изобретение относится к робототехнике и может быть использованопри создании устройств для записпрограммы управления промышленнымроботом,Известны устройства для записирограммы управления промышленнымроботом, содержащие блок обучения,блок памяти и по каждой регулируемой координате привод и датчик перемещения 1 .Однако устройство имеет сложныйи длительный процесс программированияНаиболее близким по техническойсущности к предлагаемому являетсяустройство, содержащее блок обученияи последовательно соединенные вычислительный блок, а также по каждойрегулируемой координате исполнительного органа последовательно соединенные привод и датчик перемещения,вы-ход каждого иэ которых подключен ксоответствующему входу вычислительного блока, первые выходы блока обучения соединены с входами соответствующих приводов 2).Недостатком данного устройстваявляется длительность процесса инизкая точность записи стандартныхучастков траектории. Цель изобретения - повышение быстродействия и точности устройства.Поставленная цель достигаетсятем, что устройство содержит блокзадания типовых программ и коммутатор, выход которого соединен с входом блока памяти, первые входы - свыходами соответствующих датчиковперемещения, а второй вход - с вторым выходом блока обучения, третийвыход которого подключей к входублока задания типовых программ, вы-,ходы которого соединены с входамисоответствующих приводов.На чертеже представлена функциональная схема устройства.Устройство содержит блок 1 обу- .чения, приводы 2, датчики 3 перемещения, исполнительный орган 4, вычислительный блок 5, блок 6 памяти,блок 7 задания типовых программ,коммутатор 8,Устройство работает следующимобразом,Оператор, нажимая орния блока 1 обучения, приводитв движение приводом 2 исполнительныйорган 4, который перемещается в необходимую тОчку на заданной траектории. При этом сигналы от датчиков8 О 721 г формула изобрет.ниц 1 69 Тираж 951 Подписно НИИПИ каз илиал ППП "Патент, г. Ужгород, ул. Проектна 3 перемещения поступают в вычислительный блок 5 и далее в блок б памяти, Так осуществляется запись программы для нетиповых участков траектории. Если же непосредственно за точкой записи следует типовой участок траектории, то оператор с помощью блока обучения подключает блок 7 задания типовых программ, который выдает требуемую типовую программу управления приводом 2 исполнительного органа 4. При этом исполнительный орган 4 перемещается по заданной траектории, а информация о перемещении с помощью датчиков 3 перемещения поступает на управляемый коммутатор 8, который непосредственно 15 ,посылает ее в блок 6 памяти, так как данная информация не требует обработки в вычислительном блоке 5, Исполнительный орган 4 осуществляет движение в соответствии с типовой прог- що раммой и перемещается по заданной траектории до конечной точки типовой программы. Цалее оператор может продолжить запись программы, используя ручное управлЕние, или же, если далее следует типовой участок, воспользоваться типовой программой перемещения исполнительного органа.Применение изобретения позволяет за счет автоматизации процесса программирования стандартных участков траектории сократить время и повысить точность записи программы. Устройство для записи программауправления промышленным роботом,содержащее блок обучения и последовательно соединенные вычислительныйблок, а также по каждой регулируемойкоординате исполнительного органапоследовательно соединенные приводи датчик перемещения, выход каждогоиз которых подключен к соответствующему входу вычислительного блока,первые выходы блока обучения соединены с входами соответствующих приводов, отличающееся тем,что, с цельюповыаения точности ибыстродействия устройства, оно содержит блок задания типовых программ икоммутатор, выход которого соединенс входом блока памяти, первые входыс выходами соответствующих датчиковперемещения, а второй вход - с вторымвыходом блока обучения, третий выходкоторого подключен к входу блока.задания типовых программ, выходы которого соединены с входами соответствующих приводов,Источники информации,принятые во внимание при экспертизе 1. Автоматическая сварка,1976, Р 9, с.56-62. 2. Авторское свидетельство СССР по заявке Р 2452865/25-24,кл. В 25 Э 9/ОО, 1977 прототип) .
СмотретьЗаявка
2677940, 26.10.1978
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГОКРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРО-СВАРКИ ИМ. E. O. ПАТОНА AH УКРАИН-СКОЙ CCP
ЗАГРЕБЕЛЬНЫЙ ВЛАДИМИР ИВАНОВИЧ, КУЦЕНКО ВЛАДИМИР ИННОКЕНТЬЕВИЧ, ГУБИНА ОЛЬГА АЛЕКСАНДРОВНА
МПК / Метки
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/2-807217-ustrojjstvo-dlya-zapisi-programmyupravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программыуправления промышленным роботом</a>
Тренажер для подготовки операторов и оценки качества задания программы перемещений промышленных технологических роботов

Номер патента: 1825728
Опубликовано: 07.07.1993
Автор: Бондаренко
МПК: B25J 11/00
Метки: задания, качества, операторов, оценки, перемещений, подготовки, программы, промышленных, роботов, технологических, тренажер
...которых измерительный эле 1 ен. 3 находится в е трубки допустимых о" клоне:",;и 5 10 15 20 25 30 35 40 45 50 55 Оу1 у = Р ту, (1)1=1где пу - число отклонений измерительного элемента 3 по координате У за допустимыа пределы, зафиксированное самописцем 18.Так как в любой момент времени смещение измерительного элемента 3 на прорезь по уровню и продолжительности и в общем случае по форме носит случайный характер, то сигнал Оу на выходе усилителя 30 зависит от величины этого смещения, имеет случайный характер и может быть определен повыражению О 1 у(т) " КуЕ 1 у(т), (2) где Ку -"крутизна характеристики цепи "фотодатчик-усилитель", мм;Еу(т) - мгновенное значение величины смещения (ошибки позиционирования) измерительного элемента 3 в направлении...
Телевизионная система для передачи изображений нескольких объектов

Номер патента: 1343563
Опубликовано: 07.10.1987
Авторы: Петруня, Сардыко, Сафьян
МПК: H04N 7/08
Метки: изображений, нескольких, объектов, передачи, телевизионная
...считывается информация, записан 5 134 ная в интервале импульса разрешения записи, предшествующего импульсу , после чего в эти же ячейки памяти записывается новая информация, В начале следующего периода(Фиг.4 в) этого же сигнала изменяется код на выходе адресного счетчика 48, после чего происходит новый цикл записи считывания и так повторяется до конца импульса разрешения записи Г,В интервале ь (фиг,4 г) через коммутатор 47 на управляющий вход блока 45 подается сигнал считывания и производится многократное считывание информации, записанной за интер-, вал о, . В интервале 3 (фиг,4 г) повторяется процесс, имевший место в интервале С, и т.д, Сброс адресного счетчика 48 осуществляется импульсом, поступающим с выхода дешифратора 49....
Устройство для обнаружения ошибок в блоках памяти программ
Номер патента: 1278982
Опубликовано: 23.12.1986
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
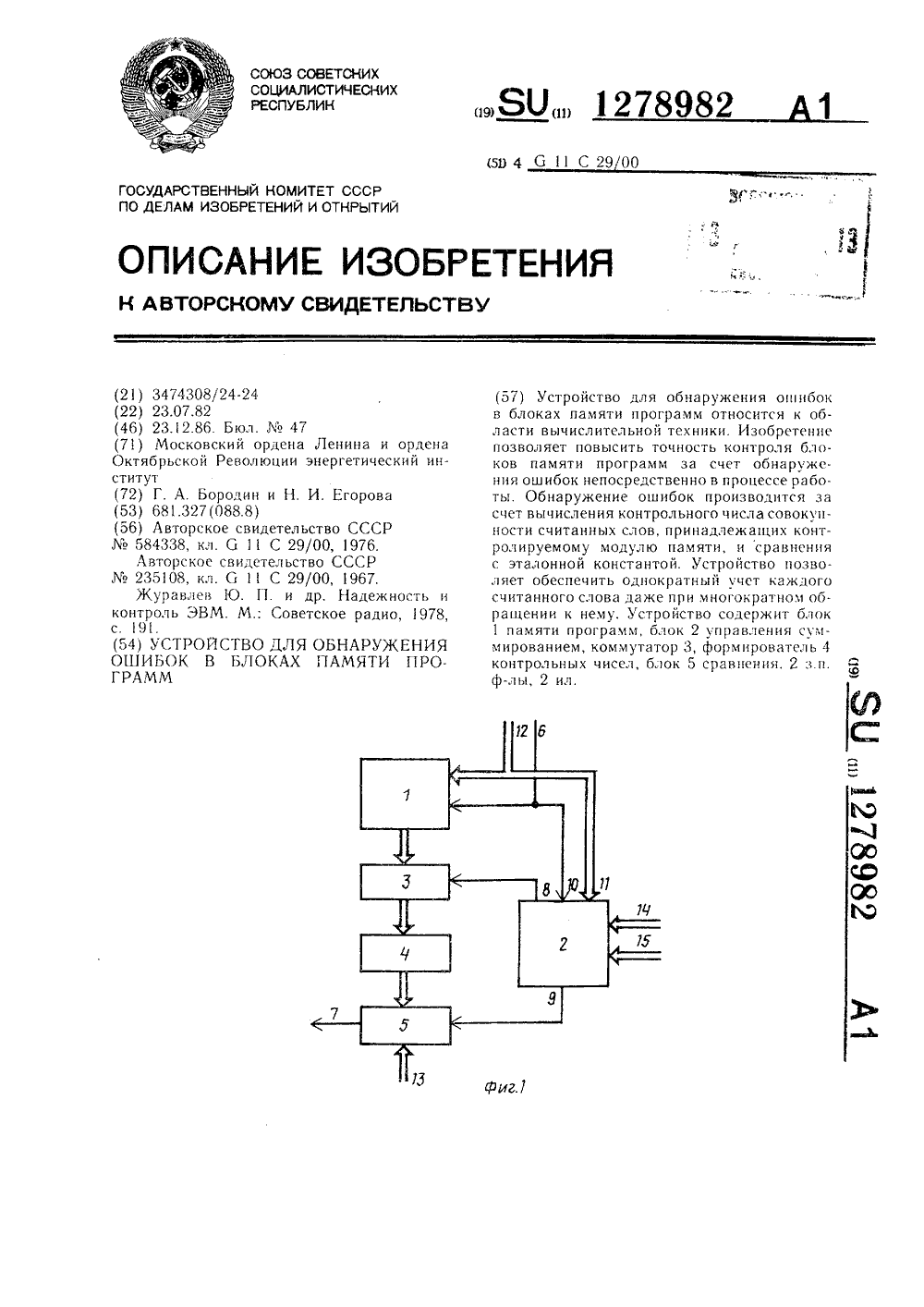
...совылают, цто означает оорыИсце к коц; ролируслому модуло памяги, тс б,Ок 9 .рыв 110- ция вырабатывает разрспы юИи й 1 с)тс 1 сиыл, поступаю)ций на 1)-вход тр. геры 20. Импульс разрешения выооркц по вход, 6 ностуцает церез коммутатор 18 Еа вход оловибратора 21, кото)ый формируе; импульс нужной е.телыОс) и л.)я обрыИе;1 я к блоку 32 Опс.ративОЙ 1.2 МИЕИ, 10 сту цые 01 пи Й рез формирователь 25 ы в:ол 35 Колыадресов младших разрядов в это время через коммутатор 38 поступают на вход 34. г 1 о входу 31 установлен режим считывания из блока 32 памяти. В результате этого по здпрашиваемому адресу выбирается информация (единица или ноль). Возможны двд про. должения работы блока 2:1. Если считывается единица - признак первого обращения по...
Устройство для обнаружения ошибок в блоках памяти программ

Номер патента: 1709395
Опубликовано: 30.01.1992
Авторы: Качанко, Сигалов, Фараджев
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
...из "0" В "1" триггера 111 одна-ВИЛрэтор 14 формирует падокитедьный импу.",ьс, который прибавляет:"116 и через элемент И,11 И 19 поступает нэ Вход ээписи блока 2 пэмЯти. В блоке 2 памяти по адресу считывания записывается 5 10 20 25 30 5 40 45 единичное значение с триггера 10. Если пралсходит обращение к ячейке памяти, к которой уже обращались, то содержимое соответствующего адреса блока 2 памяти равно единице, Следовательно, на выходе сумматора 15 присутствует нулевой потенциал и содержимое данного адреса повторно не накапливается в сумматоре 4, Кроме того, в счетчике 16 не учитыва 1 атся многократные обращения к одним и тем же адресам, счетчик 16 считает только первое абрэщен 1 ле по каждому иэ адресов, Пасде того, как было обращение...
Блок-схема управления перемещением ковочного

Номер патента: 369969
Опубликовано: 01.01.1973
МПК: B21J 13/10
Метки: блок-схема, ковочного, перемещением
...сложение чисел, вырабатываемых блоками 10 и 11, и выдает число, показывающее, на каком расстоянии находится начало обраба тываемого участка поковки от бойков пресса Х, Число, вырабатываемое блоком 12, соответствующее удлинецшо участка поковки между клещами и бойками пресса в результате обжатия поковки, передается в блок 14, 15 где умножается на коэффициент К, учитывающий удлинение поковки в обе стороны от бой ков.Из опытных данных К = 1,8 - 2,07, Полученная величина суммируется от хода к оду 20 пресса в блоке и передается в арифметический блок 16, где прибавляется к первоначальной длине проковываемого участка 1. Блок 16 вырабатывает число, соответствующее текущему значению расстояния конца 25 обраоатываемого участка от его...
Предыдущий патент: Устройство для записи программыуправления промышленным роботом
Следующий патент: Двухкоординатное устройство дляпрограммного управления
Случайный патент: Устройство для выгрузки продукта из коробок