Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
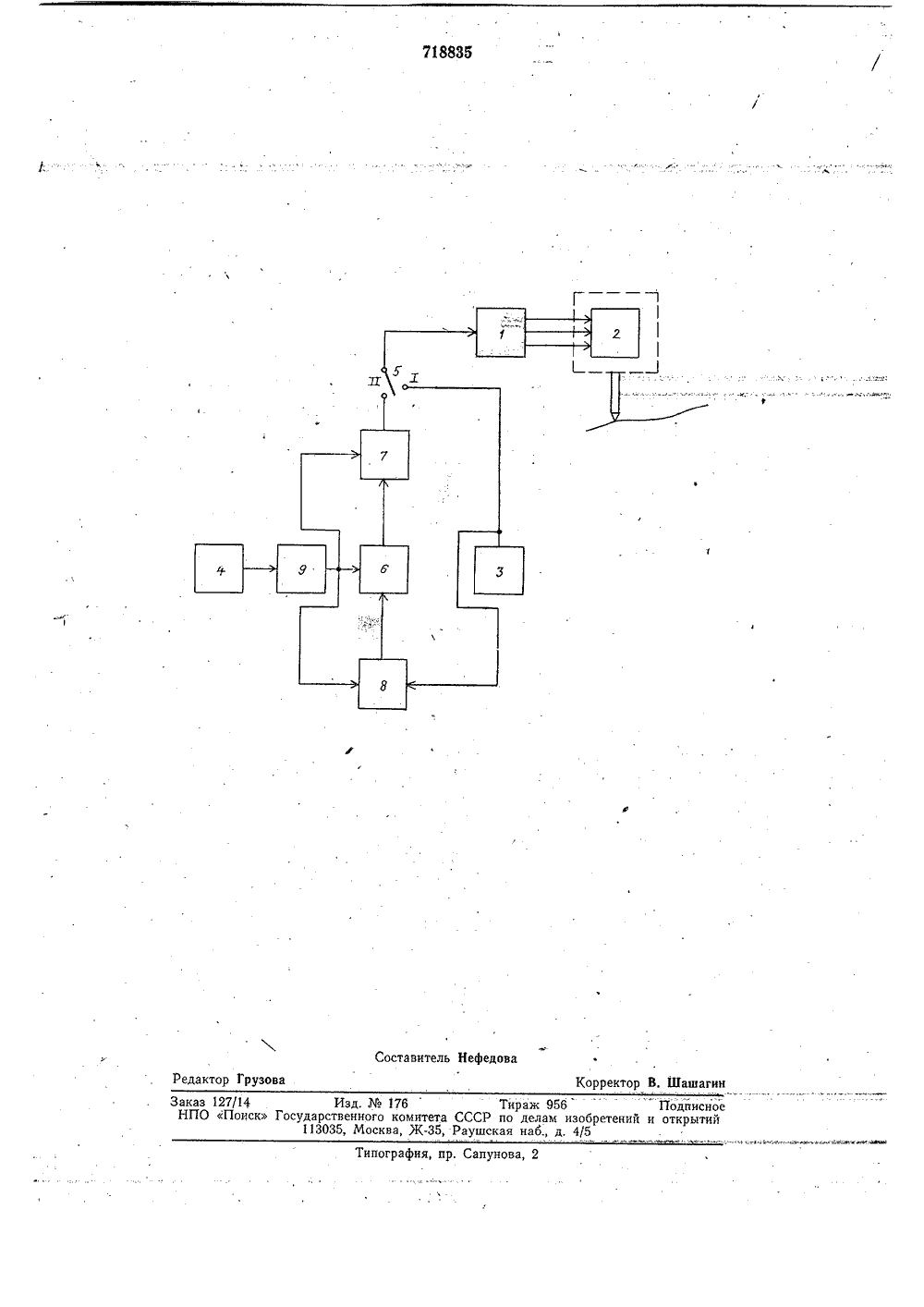
ОЛИИЗОБРЕТЕНИЯ и 1 71 8835 Союз Советских Социалистических Республик) . Кл.в В 19/00Л 9/00с присоединен 23) Приоритет43) Опубликовано45) Дата опублик Государств к комит 3) УДК 62-50(088.8 28.02.80. Бюллетень8вания описания 28.02.80 етеиий по долам крытий 72) Авторы изобретен 71) ЗаявителИ. Сергацкий, В. Ф. Давиденко и Г, А. Линкининститут автоматики им. ХХУ съезда КПСС и орЛенина и ордена Трудового Красного Знамениинститут электросварки им. Е. О. Патона Киевск ена 54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ "РОБОТОМ1.Изобретение относится к области автоматизации производственных процессов -и может быть использовано дляуправлениясварочным роботом.Известны устройства для программного управления промышленным роботом. Устройство 1, содержащее задающий механизм, преобразователи, блок памяти и приводы робота, не обеспечивает коррекции скорости перемещения исполнительного ор 1 гана робота при воспроизведении программы. Наиболее близким техническим решениемк изобретению является устройство 21, содержащее генератор постоянной частоты и 15последовательно соединенныегенераторрегулируемой частоты, ключ и первыйблок,памяти, выходы которого подключенык входам приводов робота,Недостаток этого устройства состоит в 20невозможности запоминания результатакоррекции скорости перемещения рабочегооргана при воспроизведении программы;чгб " "не позволяет получить высококачественную.программу.25Цель изобретения - расширение областиприменения устройства.Сущность изобретения заключается в том,что устройство содержит последовательносоединенные делитель частоты, преобразо ватель частота - код;-второй блок памяти ипреобразователь код - частота, выход которого подключен к"второмувходу ключа,а второй вход - к выходу делителя частотыи второму входу второго блока памяти. Выход генератора регулируемой частоты со-единен с вторым входом "преобразователячастота - код, а выход генератора постоянной частоты подключен к входу делителячастоты,На чертеже изображена функциональнаясхема устройства.Устройство содержит первый блок 1 памяти, выходы которого подключены к вхо-"дам приводов 2 робота, генератор 3 регулируемой частоты, генератор 4 постояннойчастоты, ключ 5, второй блок 6 памяти,преобразователь 7 код в частота, преобразователь 8 частота - код, делитель 9 частоты.Работает устройство для программногоуправления следующим образом.В блок 1 памяти вводят программу координатных перемещений исполнительногооргана робота вдоль заданной траектории.Затем производят корректировку программы по скорости перемещения исполнительного органа. Для этого ключ 5 устанавливают в положение (1) и дают команду навоспроизведение программы, записанной в718835 3блоке 1. По этой команде начинает рабо- " "зтать генератор 4 постоянной частоты и генератор 3 регулируемой частоты. Частотойимпульсов" последнеГо оредеяе гся скорость =воспройзведенйя "программы, записанной в бблоке 1 и, следовательно, скорбсть- переме- вШения- исполнительного органа робота, Импульсы генератора 3 регулируемой частотыпоступают при этом через ключ 5 в блок 1памяти, откуда с той же частотой на приво щды 2 робота йодаютсм "сигналы программы. Одновременно импульсы генератора 3 дрегулируемой -частбты поступают на преобразователь 8 частота - Ъйд," с выхода ко-ГЙ /АР б ттЕЮ 1 йт "Йих передача в блок 6 памяти.В процессе воспрбизведения программыкоординатных перемещений, записанной вблоке 1 йамяти;" в- завйсимостй от техноло-гических требований, например при подборе 20требуемои скоростй сваркй;регулируютскорость перемещения рабочего органа на = участках траектории движения, в качествекоторой может быть линия сварки. Это регулйроъайие осуществляется за счет изме=ненйя скбростй сФтывайия "программы изблока 1" памяти" с "помощью генератора 3регулируемой частоты. При этом результат "регулирования через преобразователь 8 ча-= стота -кододновременно"Йпфййвается З 0в блок 6 памяти. С помощью делителя 9 ча" "стотй; с выхода которого на преобразователь 8 частота - код и на блок 6 памятиЙо 1 гуйййот йййульсЪ"ряда часготс "заданным коэффициеитом "делениК прбйИодят З 5"коЪирование р 1 гуПируемой генератором 3 ==частбты и"йоследоваТеЖйое за 1 оЯййанйеполучаемых кодовПо окончании воспроизведения всейпрограммы координатных перемещений и 40" заййсй"результата коррекцйи скоростй нос-произведения в блок 1 памяти, ключ 5 уста"навливают в положение (11) и после возвра 1 цейия=исполнительного оргайав нъчальнбе йоложеяие начинают воспроизведение 45"уже откорректированной Ъо с ости программы. Для этого включают генератор 4 постоянной частоты. Через делитель 9 на блок 6 памяти и преобразователь 7 код -чаСТота также" поступают" Импульсь рядачастот с тем Же заданным коэффициентом деления. Из блока 6 памяти через преобра ователь 7 код - частота и ключ 5 на блок1 памяти проходят импульсы скорости считывания программы стеми же изменениямичастоты, которые задавались генератором 3регулируемой частоты в предыдущем циклеоспроизедения программы. Преобразователь 7 код - " частота выполняет в данном случае фуйкцию интерполятора. Блок 6памяти при коррекгйровке .скорости перемеения рабочего" "органа запоминает темпработы блока 1 памяти; а при воспроизвеении откорректированной по скоростипрограммы обеспечивает те же необходимыеизмейейим темпа воспроизведения программы, которые вводились генератором 3регулируемой частоты во время корректировки.Применение изобретения позволит, осуществить коррекцию-скорости перемещениярабочего органа" путем записи в процессевоспроизйедейия "программы координатныхперемещений темпа работы блока памяти.Формула изобретенияУстройство для программного управленияпромышленным роботом; содержащее генератор постоянной "частоты и"последовательно соединенйые -генератор регулируемойчастоты, ключ и первый блок памяти, выходы когорбго подключены к входам приводов робота "отличающееся тем, что, сцелью расширения области примененияустрЬйства-, оно содержит" последовательносоединенные делитель частоты, преобразователь частота - код, второй блок памятии преобразователь код в частота, выходкотброго подключей квторому входу ключа,а второй вход - к выходуделителя частотыи второму входу второго блока памяти, выход генератора регулируемой частоты со"единен с вторым входом преобразователячастота" в -" коД; авыход генератора постоянной частотыподключен к входу делителячастоты,Источники информации,принятые во внимание при экспертизе 1. Патон Б, Е. и др. Промышленные роботы для сварки. Киев, сНаукова думка. ,1976, с, 115 - 117.2. Авторское свидетельство СССР259985, кл. 6 05 В 11/01, 1973 (прото тип) .718835 ктор В. Шашагин Редактор Грузо Составитель Нефедов Изд.176 Тираж 956 венного комитета СССР по делам изоб 5, Москва, Ж, Раушская наб., д. 4/5 Заказ 127/14 НПО Поиск Государс 1130
СмотретьЗаявка
2581491, 15.02.1978
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС, ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА АН УКРАИНСКОЙ ССР
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ДАВИДЕНКО ВИТАЛИЙ ФИЛИППОВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: программного, промышленным, роботом
Опубликовано: 29.02.1980
Код ссылки
<a href="https://patents.su/3-718835-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Преобразователь частоты импульсов в код

Номер патента: 534033
Опубликовано: 30.10.1976
Автор: Майоров
МПК: H03K 13/20
Метки: импульсов, код, частоты
...ходу, а счетчики 4, 5, ре534033 Составитель 11. ЛягниТскред В. Рыбакова Корректор Т. Добровольская Редактор Е, Караулова Заказ 2311/13 Р 1 зд. М 1713 Тираж 1029 Подписное Ш 11 ИПИ Государственного комитета Совета Министров СССР по делам изобретении и открытий 113035, Москва, )К-зз, Раугиская иаб., д. а,5Типограс 1 ия, ир. Сапунова, 2 гистр 3 и делитель 8 частоты устанавливаются в исходное состояние.При подаче сигнала на вход элемента 6 совпадения с формирователя 7 входных сигналов импульсы генератора 2 поступают на вход первого счетчика 4 и через делитель 8 на вход регистра 3. Поделенная счетчиками 4 и 5 частота поступает через элемент И 11 на вход вычитающего счетчика 1. Триггер 12 в этот момент находится в единичном состоянии....
Преобразователь “код-частота” гармонического сигнала

Номер патента: 949799
Опубликовано: 07.08.1982
Авторы: Глазов, Гризик, Казанский, Толкачев
МПК: H03K 13/02
Метки: «код-частота, гармонического, сигнала
...входу элемента сравнения ивторому входу множительного блока,выход которого соединен с первымвходом накопителя, выход которого 45подключен к входу вычислителя синуЮса, а второй вход - к выходу элемента И и входу сброса счетчика, причемвыход преобразователя код-аналог соединен .с входом узкополосного следящего Фильтра,Структурная электрическая схемапреобразователя код-частота гармонического сигнала поясняется чертежом.Преобразователь содержит регистр1 кода частоты, накопитель 2, вычислитель 3 синуса, преобразователь4 код-аналог, тактовый генератор 5,кодовый преобразователь б, логический элемент И 7, счетчик 8, элемент б 09 сравнения, цифровой множительныйблок 10, узкополосный следящий фильтр11,Принцип его работы заключаетсяв следующем. б...
Преобразователь код-частота гармонического сигнала

Номер патента: 1094146
Опубликовано: 23.05.1984
Авторы: Бейлин, Жилин, Кутыркин, Шершуков, Шиндов, Шлыков
МПК: H03K 13/20
Метки: «код-частота, гармонического, сигнала
...выходом - с управляющими входами первого 8 и второго 11 ключей и третьего коммутатора 13, регистр 2 амплитуды косинуса прямым и инверсным выходами подключен соответственно к первому и второму входам первого коммутатора б, выход которого подключен к первому входу регистра 12 косинуса, первый выход которого подключен к первому входу первого сумматора 14, соединенного своим выходом с входом первого буферного регистра 16, выход которого соединен с вторым входом регистра 12 косинуса и с входом первого преобразователя 18 код - напряжение, выход которого подключен к входу первого фильтра 20 нижних частот.Регистр 3 амплитуды синуса соединен прямым и инверсным выходами соответственно с первым и вторым входами второго коммутатора 7, выход...
Преобразователь код-частота гармонического сигнала

Номер патента: 1292185
Опубликовано: 23.02.1987
МПК: H03M 1/86
Метки: «код-частота, гармонического, сигнала
...значениями кода частоты, характеризующая приращение кода частоты в интервале поступления целеуказаний. Регистр 1 совместно с комбинационным сумматором периода суммирования в накопителе 2,путем подсчета импульсов тактовойчастоты в счетчике 8, обнуляемом посигналу равенства кодов с элемента9 сравнения. 1 ил,15 образует цифровой интегратор, Навход комбинационного сумматора 5 свыхода блока 14 поступает поделеннаяна 2 (за счет сдвига на ш разря дов) величина приращения кода частоты, Это приращение интегрируется вцифровом интеграторе путем суммирования с предыдущим значением кода 1 Очастоты, храни 11 ым в регистре 1, врезультате этого на выходе регистра1 формируется линейно изменяющийсякод текущего значения частоты. Запись нового текущего...
Двоичный преобразователь код-частота

Номер патента: 1695508
Опубликовано: 30.11.1991
Автор: Ващенко
МПК: H03M 1/86
Метки: «код-частота, двоичный
...кода.Сигнал частотой 20Евх=р 2"где р - вес младшего разряда входного кода 25и и щ - разрядность делителей 1 и 7 соответственно;с генератора 3 эталонной частоты поступает на двоичный делитель 1 частоты, С выходов двоичного делителя 1 частоты сформиро- ЗО ванные последовательности импульсов поступают на С-входы блока 2 формирования частотных компонент, По Р-входу блока 2 импульсы последовательностей укорачиваются до длительности, равной длительности 35 импульсов эталонной частоты. Последовательности импульсовс частотами Евх/2, гдек М - номер разряда делителя 1 частоты, поступают на соответствующие первые входы элементов И блока 5, на вторые входы кото рых с соответствующего регистра 4 входного кода поступает код, пропорциональный...
Предыдущий патент: Пневматический регулятор с переменной структурой
Следующий патент: Датчик частоты вращения газотурбинного двигателя
Случайный патент: Двухтактный регулируемый инвертор