Цикловая система программногоуправления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
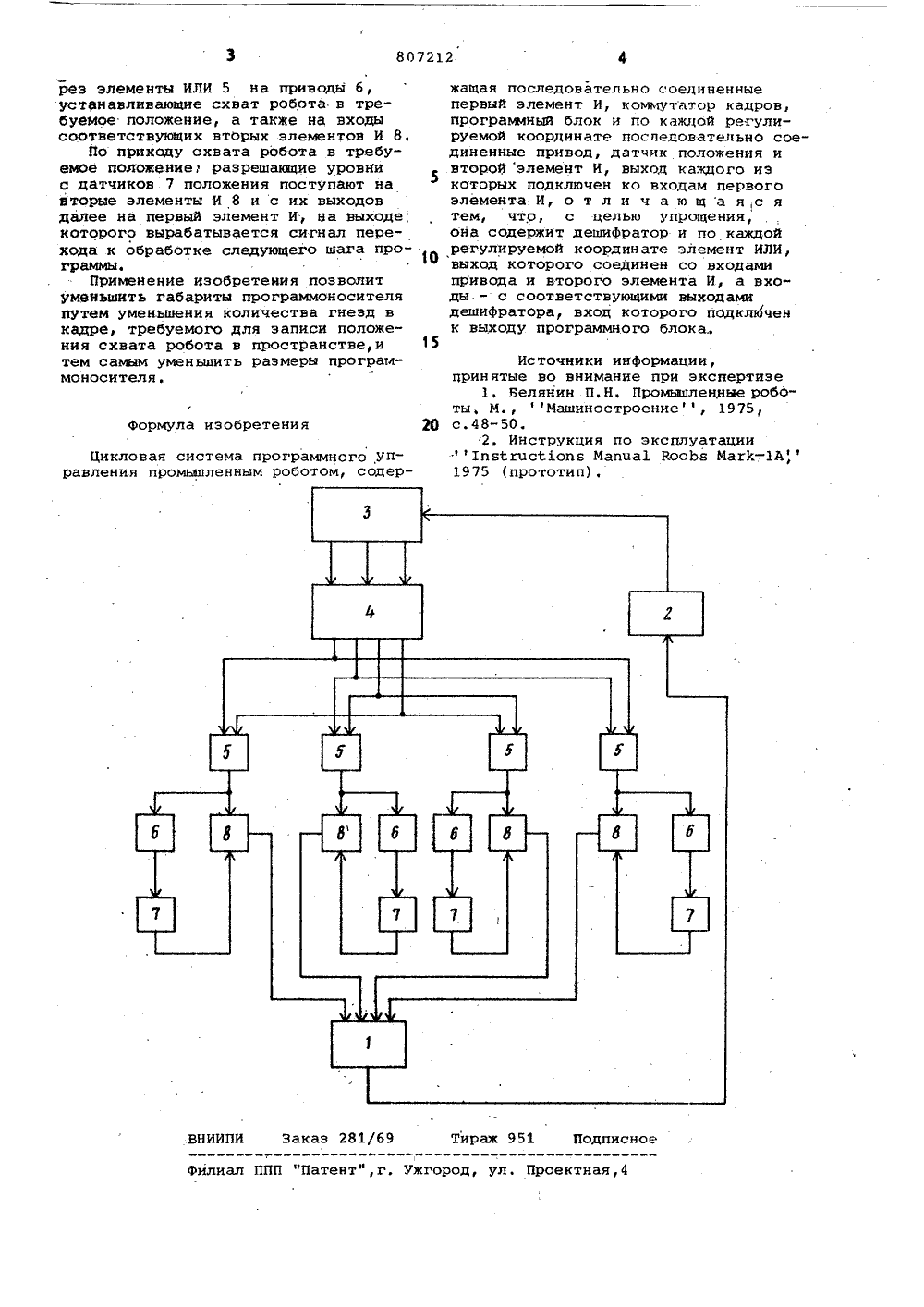
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(51)М. Кл.З С 05 В 19/00 В 25 Т 9/00 Государствеииый коиитет ССС Р по делан изобретений и открытий(71) Заявитель 54) ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ Изобретение относится к програм-мному управлению и может быть использовано для управления цикловым промышленным роботом.Известна система программного управления промышленным роботом, содержащая блок управления, программоноситель, блок считывания, по каждой регулируемой координате приводы, датчики положения и элементы И 1.Однако эта система имеет громоздкий программоноситель. Наиболее близкой по техническойсущности к предлагаемой являетсясистема, содержащая последовательносоединенные первый элемент И, коммутатор кадров, программоноситель ипо каждой координате последовательно соединенные привод, датчик положения и второй элемент И, выходкаждого из которых подключен ко входам первого элемента И 2.Недостатком этой системы является большие габариты программоносителя, обусловленные заданием положения схвата робота в прбстранствепрограммоносителя, его положения по каждой координате,Целью изобретения является упрощение системы.Цель достигается тем, что предлагаемая система содержит дешифратор5 и по каждой регулируемой координа- те элемент ИЛИ, выход которого соединен со входами привода и второгоэлемента И, а входы - с соответствующими выходами дешифратора, вход10 которого подключен к выходу программоносителя,На чертеже представлена функциональная схема системы.Система содержит первый элемент15 И 1, коммутатор 2 кадров, программоноситель 3, дешиФратор 4, элементИЛИ 5, приводы б, датчики 7 положения, вторые элементы И 8,Система работает следукщим обра 20 эом.Считывание двоично-кодированногономера положения схвата робота, записанного в кадре программоносителя 3, происходит после установки25 этого кадра коммутатором 2 по сигналу, сформированному в первом элементе И 1. Код считанного номера положения схвата поступает на входы дешифратора 4, с соответствующего3 О выхода которого сигнал попадает че807212 Формула изобретения Заказ 281/69 Тираж 951 Подписное И ПП "Патент Фили Ужгород, ул. Проектная рез элементы ИЛИ 5 на приводы б,устанавливающие схват робота в требуемое положение, а также на входысоответствующих вторых элементов И 8,По приходу схвата робота в требуемое положением разрешающие уровнис датчиков 7 положения поступают навторые элементы И 8 и с их выходовдалее на первый элемент И, на выходе;которого вырабатывается сигнал перехода к обработке следующего шага программы.Применение изобретения позволитуменьшить габариты программоносителяпутем уменьшения количества гнезд вкадре, требуемого для записи положения охвата робота в пространстве,итем самым уменьшить размеры программоносителя,Цикловая система программного Управления промьыленным роботом, содержащая последовательно соединенныепервый элемент И, коммутатор кадров,программный блок и по каждой регулируемой координате последовательно соединенные привод, датчик положения ивторой элемент И, выход каждого изкоторых подключен ко входам первогоэлемента И, о т л и ч а ю щ а я с ятем, что, с целью упрощения,она содержит дешифратор и по каждойрегулируемой координате элемент ИЛИ,выход которого соединен со входамипривода и второго элемента И, а входы - с соответствующими выходамидешифратора, вход которого подключенк выходу программного блока15Источники информации,принятые во внимание при экспертизе1. Белянин П, Н, Промиаленные роботы, М., Машиностроение, 197520 с.48-50.2. Инструкция по эксплуатации1 пз 1 пс 11 опз Мапца 1 КооЬя Маг 1 сА,1975 (прототип),
СмотретьЗаявка
2639703, 05.07.1978
ПРЕДПРИЯТИЕ ПЯ Р-6930
КНАУЭР ИГОРЬ БОРИСОВИЧ, ШОР ВИКТОР ВАЛЕНТИНОВИЧ, ГАВРИЛОВА ГАЛИНА СЕМЕНОВНА, ЗВЕРЕВ МИХАИЛ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: программногоуправления, промышленным, роботом, цикловая
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/2-807212-ciklovaya-sistema-programmnogoupravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Цикловая система программногоуправления промышленным роботом</a>
Двухкоординатный мозаичный дискретный излучатель смещения светового пятна

Номер патента: 373901
Опубликовано: 01.01.1973
МПК: H04N 17/00
Метки: двухкоординатный, дискретный, излучатель, мозаичный, пятна, светового, смещения
...При отсутствии смещения пятна световое пятно одновременно освещает +1 и- 1-й элементы мозаики, при этом схемы 2 и 8 За прет не пропускают сигнал в реверсивныйсчетчик 4, и значение У в нем равно 0 (У=О). При смещении светового пятна на величину рассогласования, равную его радиусу (например, на +1 элемент мозаики) в рерсивном счетчике запишется +1, приПредмет изобретения Составитель С. Вольнова едактор М. Афанасьева Техред Л. Грачева Корректор Г. ЗапорожецЗаказ 1436/1411 НИИПИ Комитета п Изд. Мз 1299 Тираж 678 елам изобретений и открытий прн Совете осква, Ж, Раушская наб., д. 45 Подписноеистров СССР ипография, пр. Сапунова смещении пятна на +2-й элемент мозаики в реверсивном счетчике запишется значение +3. Соответственно при смещении...
Проходческий робот и транспортирующий механизм проходческого робота
Номер патента: 1549153
Опубликовано: 10.10.1995
Авторы: Гришин, Дворников, Ершов, Жуков, Замулин, Пономарев, Туров, Хромых, Шапошников
МПК: E02F 5/18
Метки: механизм, проходческий, проходческого, робот, робота, транспортирующий
1. Проходческий робот, включающий буровую головку с рабочим органом, выполненную в виде связанных между собой посредством управляемого отклонителя передней и задней секций, первая из которых состоит из двух коаксиально установленных цилиндров, транспортирующий механизм со шламопроводом, который связан с внутренним цилиндром передней секции буровой головки, шнек, размещенный во внутреннем цилиндре, привод вращения шнека, податчик и кабельные коммуникации, отличающийся тем, что с целью расширения области применения при одновременном повышении ремонтопригодности и надежности работы, робот снабжен гибкой в поперечном направлении скользящей опалубкой, опорными элементами и дополнительными приводами вращения, шламопровод выполнен в виде гибкого...
Способ определения углового поло-жения b системе координат носителяи элементов внутреннего ориентирова-ния съемочного устройства

Номер патента: 823888
Опубликовано: 23.04.1981
Авторы: Злобин, Киселев, Орлов
МПК: G01G 11/02
Метки: внутреннего, координат, носителяи, ориентирова-ния, поло-жения, системе, съемочного, углового, устройства, элементов
...теодолитак системе координат носителя, определяют угловое положение съемочногоустройства в.системе координат носителя, а также точные значения элементов внутреннего ориентированияэтого устройства.Способ определения в системекоординат носителя углового положения и элементов внутреннего ориентирования съемочного устройства предусматривает следующий порядок установки носителя со съемочным устройством и измерительных приборов:строго вертикадьио выставляетсяноситель, на котором установленосъемочное устройстао;на носителе используется юстировочное зеркало, котории задаетсяодна из конструктивных осей носителя, например. Х;отъюстированный вспомогательныйавтоколлимационный теодолит автокол 4лимационно выставляется по оси Хносителя с...
Устройство для преобразования координат

Номер патента: 1254475
Опубликовано: 30.08.1986
Авторы: Дауров, Орлов, Черкашин
МПК: G06F 7/548
Метки: координат, преобразования
...по заднему фронту этого импульса осуществляется через логический элемент ИЛИ 34 установка триггера 24, а также по выходу51 сдвиг регистра угла 5 на ш разрядов влево и увеличение счетчика 6циклов на единицу.Блок 12 управления переходит к обработке результатов цикла. Импульсыс генератора 26 через разрешенныйлогический элемент И 28 поступают нарегистр 20, который осуществляетобработку результатов цикла, аналогично обработке исходных данных,Описанный порядок работы повторяетсядо завершения последнего (М)-гоцикла, когда содержимое счетчика Ьциклов станет равным (М), в этомслучае сигнал с выхода счетчика повходу 36 поступает в блок 12 управления, где разрешает логический элемент И 39 и инициирует блок 27 анализа знаков на обработку...
Устройство измерения угловой координаты системы посадки
Номер патента: 1760868
Опубликовано: 27.09.1995
Авторы: Криворучко, Пименов, Пономаренко
Метки: координаты, посадки, системы, угловой
1. УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ, содержащее блок вычисления коэффициента разнослышимости, выход которого является выходом устройства, отличающееся тем, что, с целью повышения точности измерения угловой координаты, в него введены последовательно соединенные компаратор, измеритель длительности импульса, первый блок сравнения кодов, первый элемент НЕ и элемент И, последовательно соединенные второй элемент НЕ и измеритель длительности паузы, а также второй блок сравнения кодов и генератор тактовой частоты, при этом первый вход компаратора соединен с сигнальным входом блока вычисления коэффициента разнослышимости и является входом устройства, второй вход компаратора является входом напряжения порога, выход цифрового...
Предыдущий патент: Устройство для идентификациилинейных обектов управления
Следующий патент: Система программного управленияпромышленным роботом
Случайный патент: Нажимной валок с регулируемым прогибом