Устройство для записи программы промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 706823
Авторы: Бондаренко, Загребельный, Куценко, Пастушенко, Сергацкий, Тимченко

Текст
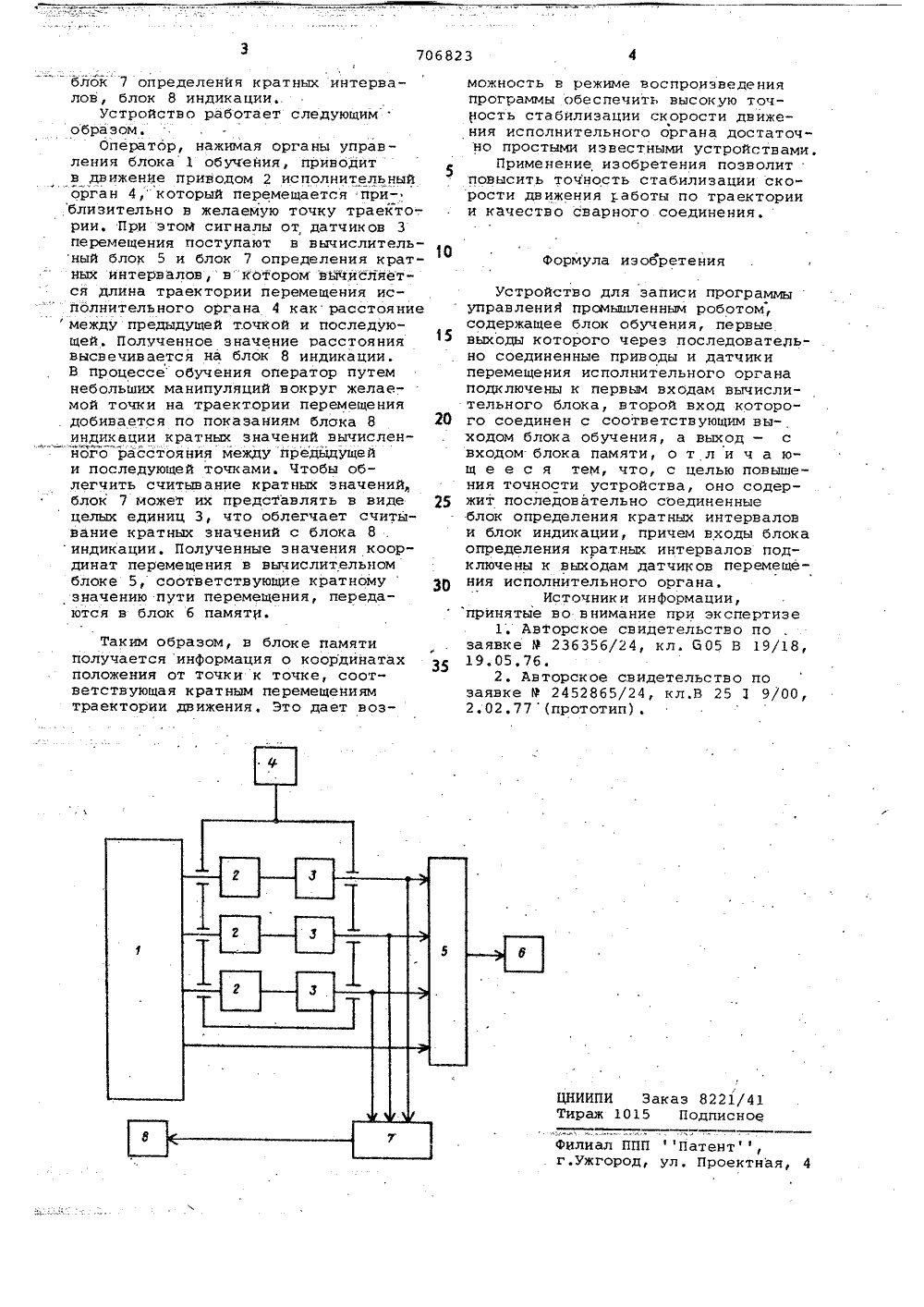
Союз Советских Социалистических Республик(51)М. Кл 05 В 19/00 .25 У 9/00 исоединением заяв осударственный комите СССР но делам изобретений и открытий(088, 8) пуб оваио 30.12 79 Бюллетень Йо та опубликования описания 0501.80 Авторьизобре.И.Бондаренко, В.И,Куцен В,И,Загребельский,Г,И,Сергацкий и Ю. В.А,Тимченко,Пастушенко 71) ЗаяВИтЕЛЬ Ордена Ленина и ордена Трудового Красного Энам электросварки им.Е,О.Патона нститут СТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ им ре,устройения,осле я с ало Изобретение Относится к областипрограммного управления многокоор-динатными устройствами и может бытьиспользовано при записи программыуправления .положением исполнительного 5органа промышленного робота, например, при дуговой сварке.Йзвестны устройства для записипрограммы управления, промышленнымроботом,Устройство 1, содержащее блокпамяти, исполнительный орган, датчики перемещения, исполнительныеприводы и сумматоры, не обеспечивает стабилизации скорости перемещения 15по траектории,Наиболее близким техническшением к изобретению являетсяство 21, содержащее блок обучпервые выходы которого через пдовательно соединенные приводы идатчики перемещения исполнительногооргана подключены к первым входамвычислительного блока, второй входкоторого соединен с соответствующим 25выходом блока обучения, а выход -с входом блока памяти,В известном устройстве записьосуществляетс произвольно выбранным интерв м между точками, 30 когда используется распространенный метод записи программы обучения от точки к точке. При этом произ-, вольно выбранные интервалы записываемой траектории в дальнейшем при воспроизведении программы должны интерполироваться,В большинстве случаев в режиме интерполяции должна быть выдержана заданная скорость дви- жения. Если же робот выполнен не в прямоугольной системе координат, а в сферической, цилиндрической, то обеспечить стабильность скорости при произвольных отрезках интерполяции крайне сложно.Цель изобретения - повышение точности устройства, Для этого оно содержит последовательно соединенные блок определения кратных интервалов и блОк индикации, причем входы блока определения кратных интервалов подключены к выходам датчиков перемещения исполнительного органа.На чертеже представлена функциональная схема устройства.Она содержит блок 1 обучения,приводы 2 исполнительного органа,датчики 3 перемещения исполнительного органа,исполнительный орган 4,вычислительный блок 5, блок 6 йамяти706823 Формула изобретения 35 Заказ 8221/41 5 Подписное ЦНИИТираж Филиал г.ужго Патент,лПроектная,блок 7 определения кратных интервалов, блок 8 индикации.,Устройство работает следующимобразом.Оператор, нажимая органы управ -ления блока 1 обучения, приводитв движение приводом 2 исполнительныйорган 4,"который перемещается приблизительно в желаемую точку траектории. При этом сигналы от датчиков 3перемещения поступают в вычислительный блок 5 и блок 7 определения кратных интервалов, в котором вычйсляется длина траектории перемещения исполнительного органа 4 как расстояниемежду предыдущей точкой и последующей, Полученное значение расстояниявысвечивается на блок 8 индикации.В процессеобучения оператор путемнебольших манипуляций вокруг желаемой точки на траектории перемещения. добивается по показаниям блока 8 20индикации кратных значений вычисленйого расстояния между предыдущейи последующей точками. Чтобы облегчить считывание кратных значений,блок 7 может их представлять в виде 25целых единиц 3, что облегчает считывание кратных значений с блока 8индикации. Полученные значения координат перемещения в вычислительномблоке 5, соответствующие кратному З 0значению пути перемещения, передаются в блок 6 памяти. Таким образом, в блоке памяти получается информация о координатах положения от точки к точке, соответствующая кратным перемещениям траектории движения. Это дает возможность в режиме воспроизведения программы обеспечить высокую точность стабилизации скорости движения исполнительного органа достаточно простыми известными устройствами.Применение изобретения позволит повысить точность стабилизации скорости движения 1.аботы по траектории и качество сварного соединения. Устройство для записи программыуправлениЙ промышленным роботом,содержащее блок обучения, первыевыходы которого через последовательно соединенные приводы и датчикиперемещения исполнительного органаподключены к первым входам вычислительного блока, второй вход которого соединен с соответствующим выходом блока обучения, а выход - свходом блока памяти, о т л и ч а ющ е е с я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенныеблок определения кратных интервалови блок индикации, причем входы блокаопределения кратных интервалов подключены к выходам датчиков перемещения исполнительного органа.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство позаявке Р 236356/24, кл. 605 В 19/18,19.05,76.2. Авторское свидетельство позаявке Р 2452865/24, кл.В 25 1 9/00,2,02,77 (прототип) .
СмотретьЗаявка
2650119, 21.07.1978
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА АН УКРАИНСКОЙ ССР
ЗАГРЕБЕЛЬНЫЙ ВЛАДИМИР ИВАНОВИЧ, ТИМЧЕНКО ВИКТОР АНАТОЛЬЕВИЧ, БОНДАРЕНКО АЛЕКСАНДР ИГНАТЬЕВИЧ, КУЦЕНКО ВЛАДИМИР ИННОКЕНТЬЕВИЧ, СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ПАСТУШЕНКО ЮРИЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: записи, программы, промышленным, роботом
Опубликовано: 30.12.1979
Код ссылки
<a href="https://patents.su/2-706823-ustrojjstvo-dlya-zapisi-programmy-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программы промышленным роботом</a>
Устройство для установки и перемещения блоков радиоэлектронной аппаратуры

Номер патента: 437261
Опубликовано: 25.07.1974
Автор: Шахнович
МПК: H05K 13/04
Метки: аппаратуры, блоков, перемещения, радиоэлектронной, установки
...взаимодействующей с панелью блока.На фиг. 1 показано предлагаемое устройство, вид в плане; на фиг. 2 - то же, разрез по А - А на фиг. 1; на фиг. 3 - взаимодействие устройства с блоком радиоэлектронной аппаратуры; на фиг. 4 - возможный вид отверстий в опорной поверхности для фиксации устройства.Каретка 1 насажена на ручку 2 и с обеих сторон зажата шайбами 3. Положение каретки 1 на ручке 2 фиксирует установочная гайка 4, положение которой в свою очередь фиксируется винтами 5.Ручка 2 с находящейся на ней кареткой 1 навинчивается на ходовой винт 6, который жестко скреплен с,кронштейном 7 штифтом 8. Два направляющих валика 9, концы которых выполнены в виде конических головок, жестко соединены с кронштейном 7 штифтами 8. Перемещение ручки 2...
Устройство для перемещения блока

Номер патента: 547392
Опубликовано: 25.02.1977
Авторы: Букин, Вайнерман, Кондратьев, Степанов
МПК: C03B 5/00
Метки: блока, перемещения
...1, бло кв 2 кварцевого стекла, захватов 3, рабочей камеры 4, обрезного механизма 5, емкости 6 и зажимов 7.В начале цикла поплавок находится в верхнем положении.Блок 2 при помощи захватов 3 укреплен на поплавке. По мере нвплавления бпокв поплавок опускается, автоматически поддер. живая заданное положение вершины блока в рабочей камере 4. Нижняя часть блока при этом выводится через выходное отверстие емкости 6 устройства. При завершении рабочего хода поплавка приводятся в действие зажимы 7, не связанные с поплавком, с помошью которых блок фиксируется в положении, соответствующем окончанию цикла нвплавления. Затем выступающая снизу емкости часть блока отрезвется механизмом 5. Далее освобождаются захваты 3, поплавок всплывает и блок...
Устройство для установки и перемещения блоков

Номер патента: 611321
Опубликовано: 15.06.1978
Авторы: Гасюк, Душкин, Половинкин, Шмидт
МПК: H05K 5/00
Метки: блоков, перемещения, установки
...основаниях и каретки закреплены захваты с возможностью взаимодействия их между собой при перемещении блока.На фиг. 1 представлено предлагаемое устройство для установки и перемещения блоков в ра. бочем положении; на фиг, 2 - устройство с вьщ. винутым блоком; на фиг, 3 - разрез по А - А на фиг, 2; на фиг. 4 - механизм выдвижения в уверазмещенные в направляющих 2 и закрепленныедополнительным роликом 7 с возможностью взаимодействия его с кареткой. На направляющих 8основания блока 3 и направляющих 4 кареткизакреплены захваты 9.и 10 с возможностью взаимодействия их между собой при перемещенииблока. Устройство работает. следующим образом.При выдвижении блока 3 его опорные роли.ки 11 перемещаются в направляющих 2, при этомнаправляющие 8...
Способ записи программы перемещения рабочего органа промышленного робота

Номер патента: 729619
Опубликовано: 25.04.1980
Авторы: Загребельный, Сергацкий
МПК: G11B 5/00
Метки: записи, органа, перемещения, программы, промышленного, рабочего, робота
...одного, производят при одновременном управлении движением рабочего органа результатом воспроизведения всех ранее записанных сигналов координат перемещения.Запись программы перемещения рабо чего органа предлагаемым способом происходит следующим образом.В процессе движения рабочего органапромышленного робота прежде всего производят магнитную запись сигнала какой-либо одной из его координат перемещения, Затем возвращают рабочий орган и носитель магнитной записи в исходное положение и осуществляют магнитную запись сигнала другой координаты перемещения при одновременном движении рабочего органа 20 и автоматическом воспроизведении результата записи сигнала первой координаты перемещения. Подобным же образом производят магнитную запись каждого...
Устройство для индикации перемещения рабочего органа станка

Номер патента: 632496
Опубликовано: 15.11.1978
МПК: B23B 25/06
Метки: индикации, органа, перемещения, рабочего, станка
...Конический конецповодка 8 контактирует с торцовымигранями Ч -образного паза 10, выполненного нв цилиндрической поверхности хвостовика винта 6,Регулируемый зазор В между .поводком 8 и одной из торцовых граней Чобразного паза 1 0 эквивалентен углуйоворота винта 6 нв величину, обеспечивающую выбор люфта в винтовой паре,приводящей в движение рабочий органстанка, перемещение которого отсчиты632496 Устройство для индикации перемещения рабочего органа станка, содержащеедатчик перемещения, связанный с хвостовиком винта передаточным механизмом,выполненным в виде закрепленной на валу датчика подторможенной полумуфты ирегулируемого поводка, взаимодействуюшего с Ч -образным пазом, причем междуодной из поверхностей паза и поводкомимеется...
Предыдущий патент: Бесконтактное реле
Следующий патент: Многоканальное устройство для программного управления объектами
Случайный патент: Гвоздезабивной станок