Устройство для записи программыуправления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
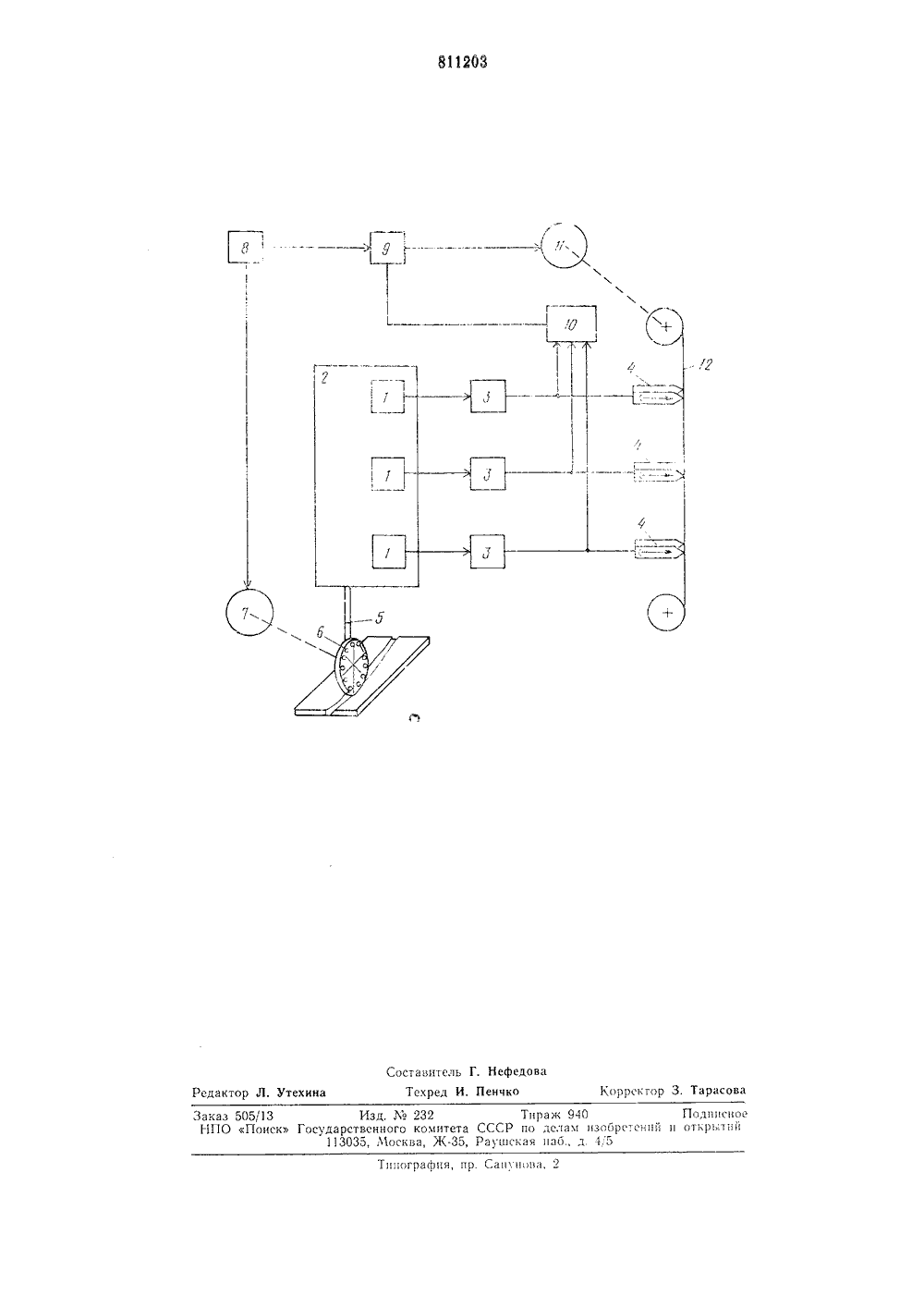
п 118 И 263 ОПИСАНИЕ ИЗОТ" РЕЖДЕНИЯ Союз сооетсиих Социалистических Республик(51) М, 1 хл.6 05 В 19/00В 251 9/00 с присоединением заявкиСССР ло делам изооретеиий и открытий(43) Опубликовано 07,03.81, Б 1 оллстспь9 (45) Дата опубликования описания 07.03.81(72) Авторы изобретения Г. А. Спыну, В, А. Тимченко, Г, И, Сергацкий, Е, Ф, Маличенко,О. Н. Гудима и Т, Н. Кояухарь Ордена Ленина и ордена Трудового Красного Знамени институт электросварки им. Е. О. Патона(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫУПРАВЛЕНИЯ ПРОМЪИЛЕННЫМ РОБОТОМ Государстяеииый комитет (23) Г 1 риоритст Изобретение относится к области робототехники и может быть использовано при создании систем управления промышленными роботами,Известны устройства для записи программы управления промышленным роботом 11, содержащее приводы исполнительного органа, датчики положения и блок памяти, однако качество такой программы низко, поскольку при программировании перемещение исполнительного органа осуществляется вручную.1 аиболее близким техническим решением к изобретению является устройство 2, содержа цсс привод программоносителя, копирный ролик, установленный на исполнительном органе и по каждой регулируемой координате последовательно соединенные привод исполнительного органа и датчик полокения, выход каждого из которых подключен к соответствующему входу программоносителя.Недостатком устройства является невозможность записи программы позиционного управления, так как при остановке в процессе записи копирного ролика 11 ривод программоносителя такяе останавливается, Андлогп 1 п 1 ая ситуация возникает, когда необходимо изменить ориентацию раоочсго органа относительно поверхности изделия при неподвижном коппрном ролике и записать пзмспснис ориснтац 1 ш нд программоносптсль.Целью изобретения является рдсширснис .к ООЛаСтн ПРИМЕНСНПЯ УСтРОйСтВа.Сущность пзоорстсния заключается втом, гго устройство содержит последоватсл 1 п 1 о соединенные блок задания режимов, а также последовательно сосдинснныс элс мснт 11,111 и кл 1 оч, второй вход которого1 одключсн ко второму выходу блока задапи 51 режимов, а выход - ко входу привода программоносителя, а входы элемента 11;1 И сосд 1 шены с выходом каждого датчика по л ожени я.Функциональная схема устройства представлена на чертеже, где ооозначсны; привод 1 исполнитсл ного органа 2, датчики положения 3, каналы записи 4, рабочий ор ган 5, коппрный ролик 6 с приводом 7,блок задания режимов 8, ключ 9, элемент 10 и привод 11 программоносителя 12,Устройство для записи программы управления промышленным роботом работает 25 следующим ооразом.Оператор вручнук 1 перемещает исполнитслы 1 ый Орган 2 пз исходного положения в па 1 дльную т 11 чку Ооработки изделия. Перек 1 сщсн:1 с приводит и 1 нявленшо сигналов нд 11 выходе датчиков положения 3. Эти сигналычерез элемент ИЛИ 10 от)срывают ключ 9 и на привод программоносителя 11 от блока задания режимов 8 поступают сигналы управления, обеспечивающие минимальную, но достаточную для надежной записи программы скорость перемещения программоносителя 12, Одновременно сигналы датчиков полоэкения 3, величина которых соответствует величинам перемещения по осям координат робота, через каналы записи 4 записываются на црограммоцоситель 12. Пос;Ее достижени 5 коцируеОЩим 1 эоликом 6 поверхности изделия оператор с; омощыо блока задания режимов 8 включает приводы 7 и 11 коцирного рог)ика 6 и )ЕрсеграэЕоносителя 12, задав предварительно требуемую скорость перемещеня. Оинхроцизация работы приводови 11 может оыть обеспечена как путем задания сигналов управления от одного переключателя блока задания ре 5)симов 8, так и соединением их с помощью э:Еектрического валя, 11 рижимая копирный ролик 6 к изделию, оператор осуществляет перемещение рабочего органа 5 цо заданной траектории, например цо линии сварного соединения, окрашиваемой поверхности и т. д, Перемещение исполнительного органа 2 с рабочим органом 5 вдоль заданной траектории осуществляется за счет сил трения между копирующим роликом 6 и поверхностью изделия. В процессе записи программы рабочий орган 5 может быть остановлен путем прекращения подачи сигнала ца приводы 7 и 11 от блока задания режимов Я. В зависимости от технологических трсоований может быть произведено изменение ориентации рабочего органа 5 цри неподвижном рабочем органе 5 и копирном ролике 6, Б этом случае перемещение программоносителя 12 осуществляется по сигналу дат)и)сов положения 3 соответствующих осей координат робота. Указанный сигнал поступает ца привод программоносителя 11 с блоеса задания режимов 8 через ключ 9. В процессе записи программы позиционного управления подача сигнала блока задания режимов 8 на привод программоноситсля 11 во время выключения привода 7 коцирного ролика 6 цс прекращается, ем самым может быть обеспечена запись на црограммоцоситель 12 технологических команд, цышэлнясмых при цеподвиэесное рабочем органе 5 (нарце)ер, црц точечной дуговой или контактной свард1 О 1 б 20 2 д 10 )д 40 4 э 5))сс), По окоцчаци ) записи программы раба. чнс перемещений Оператор Выключает приво;е 7 есо.рцого ро.ецка 6 и выво ит исполниГельный 01 эан 2 е 5 исходное положение.11 еремеецецис программоносителя 12 на учасгке от поверхности изделия до исход- НОГО ПОЛОЖЕНИЯ ХЕОЭКЕТ ОЫТЬ такЖЕ ОСУЩЕ- ствлено с ЕеамоЩью си)налОВ блока задания режимов 8 через )сл)оч 9 цо сигнала.", с Выхода датчиков положения 3 и элемента И.111 10. О цол)ОЩькэ сигналов 0.)ока задани 5 1 эсжэ)ОН 8 ОоеспечиБается .еициэ)аль- Е)а 5 скорость пе 1 эеъ)сецеци 5 )ро)1 эаммоноси - )с.л 5 е)1 эе е)е 1 эаоота)ощеъ П 1 эе)ВОДе 7 е;Опе)1 эного ролика 6.Ооласть применения предложенного устройства расширена за счет того, что оно обеспечивает запись программы позиционного уцравлс)шя, программы холостых перемещений, когда коцирный ро,Е)с це соприкасается с:юверхцостью изделия, а так. же зэ)снсние) 01)цснгации 1)абоче)о Оргаееа при )ееп)э,евэке)ом ко)ЕИ 1 эцоэ 1 эо.)ике. Формула изооретеция Устройство для записи программы уцравлсни 5) промышленным роботом, содсркащее приво программоноситсля, копирцый ролик, установл)нный ца исполнительном органе, и но каясдой регулир)смой координате последовательно соединенные привод ис)ео.)ццтслы ого органа и датчик цоложсци 5), )выход ке)ж;ОГО е)з кот 01 эых тОдкл)очсц к сооэч)стству)ое)есму Вход Н 1 эограммоцоситсля, о т л и ч а ю )те е е с я тем, что, с целью расширения области применения устройства, оцо содержит послсдоватсэеь)10 сосдинснцыс Олок задания 1 эежимов и привод копирного рол) ка, а также последовательно соединенные элементы ИЛИ и ключ, второй вход которого подключен ко второму выходу блока задания режимов, а выход ко Вхеэл привода программоноситсля, а Входы элемента И.1 И соединены с выодом каждого дат:Еика положеНИ 5),Источники информации,принятыс Во внимание при экспертизе 1. Лв)х),)атц )сс)са 5) свар)са, 1976, Л)э 9, с. 60.2. Лвторсесое свидетельство по заявке Ло 2364274,)24, кл. В 25,1 9,00, 10.05.76 Епрототе)е)1.- 1 Составитель Г. Нефедова Тсхред И, Пенчко 1,оррсктор 3. Та едактор Л. Утехи пографпя, пр. Сап 1 пова,каз 505/13 Изд. ЛЪ 232 Тираж 940 Подписное1 ПО Поиск Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская паб., д 4,5
СмотретьЗаявка
2670014, 03.10.1978
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГОКРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРО-СВАРКИ ИМ. E. O. ПАТОНА AH УКРАИН-СКОЙ CCP
СПЫНУ ГЛЕБ АЛЕКСАНДРОВИЧ, ТИМЧЕНКО ВИКТОР АНАТОЛЬЕВИЧ, СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, МАЛИЧЕНКО ЕВГЕНИЙ ФЕДОРОВИЧ, ГУДИМА ОЛЕГ НИКОЛАЕВИЧ, КОЖУХАРЬ ТАТЬЯНА НИКОЛАЕВНА
МПК / Метки
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
Опубликовано: 07.03.1981
Код ссылки
<a href="https://patents.su/3-811203-ustrojjstvo-dlya-zapisi-programmyupravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программыуправления промышленным роботом</a>
Устройство для управления приводом отсадочной машины по заданной программе

Номер патента: 187870
Опубликовано: 01.01.1966
Авторы: Гончаров, Иваницкий, Новиков
МПК: G05B 19/08, H01H 43/00
Метки: заданной, отсадочной, приводом, программе
...исходное положение отключено. Затем замыкается ключ И и нажатием кнопки пуска 14 триггер выпуска переводится в положение включено. При этом на сетку лампы 15 подается отрицательный потенциал, запирая ее, что, в свою очередь, приводит к отпиранию выходных ламп 1 б и 17. Они коммутируют двухполупериодный переменный ток в цепи электромагнита 4 выпуска.Выпуск воздуха из машины происходит до тех пор, пока триггер выпуска включен. Одновременно с переводом триггера выпуска в положение включено понижается потенциал сетки лампы 18, что приводит к запиранию лампы, При этом происходит заряд конденсатора 19. Время заряда его определяется постоянной времени цепочки ЯС - 19, 20, 21 и зависит от положения потенциометра 21, задаваемого оператором. По...
Устройство для задания программы воспроизведения контура детали

Номер патента: 383005
Опубликовано: 01.01.1973
Автор: Горохов
МПК: G05B 19/42
Метки: воспроизведения, детали, задания, контура, программы
...формирования программы для детали, приведеной па фиг. 2.Предварительно оценивают конкретный чертеж для выяснения, какие опорные точки контура определены размером, Одним из наиболее сложных вариантов можно считать замкнутый контур, у которого одна из опорных точек пе определена размерами. За опорные точки можно принять точки Л, Б, В, Г, Д, т. е. начало и концы линий одного математического закона, Не определены никакими размерами точка сопряжения дуги и наклонной в точке Г. В данном случае необходимо выяснить, какая из двух сопряженных линий при продолжении за точку .Г, выходит за пределы контура (за пределы массива обрабатываемой детали). Такой линией является отрезок ЕД.Необходимо продумать очередность построения программы так, чтобы...
Устройство для задания программы обучения

Номер патента: 1320830
Опубликовано: 30.06.1987
Авторы: Балабай, Олдерс, Харченко, Хуснутдинов
МПК: G09B 7/02
Метки: задания, обучения, программы
...КС; тт) ЫЦ ПОЗЛЕЙСТВС)ВЯЛ ЧС;С)ПГ:- т);1 ЕЗЯТбтзз,:тт.ЙО 1 НОС"ПЯЕТ НЯ ВХОДЫ блока 30 В кстсптт.к прсизВОдитс 51 с 1)явнЕ 1 ие СООТВСГС.ТВЯ За.)ЕЙСТВОВЯЦНСГО СПЕОЯТОПОМ 0 рГЯНЯ уппяВленчя .)ВОуемс.у ОрГЯ 1 у. В 0,1,"-1 яе сов пзден я пост тп 1;В: к х хс.с н С гнаЛ ПСИВЛНЕ".я Ця ВЫХОПЕ бЛО(С 31, К- ТО)ЫЙ т)осг;, .)-; 1 З ВХОды .,гЕХ;т)тон 24 .,я В сс)д э т)мента 22 сигня 1, В хсл;) тОРОГО ПООИЗВСДКТ СДВИГ На ОДЦ; ЯЧЕЮ в ре: истресз)ед;тсч)цей В обоцх сск.;я; ПЕ 1 КСТГ)Я т. СЛт ОтЕГЕДНЯЯ ОГС.".ЦЦЯ ЯЛГО) ; - МЯ Заяаня т; СОРЬ:Ч ОПЕРатСРОМ, тО СК.Патлы пт)явля 0 сия выходах регистра 1 к через т)крытье элементы 24 поступяк)т .я Входы блока 2, где производится выбор .о )тветст 1)усгцей чцкрокочянды ц перезз)ит ь ес В пеги т 3 г,роме Ого сц...
Установка для обработки изделий по заданной программе

Номер патента: 313321
Опубликовано: 01.01.1971
Авторы: Бережной, Корнилаев, Фуртичев
МПК: H05K 3/34
...реле на входе схемы н моментов подачи тока в обмотку реле на выходе схемы, Выдержка регулируется в пределах от десятой доли секунды до нескольких секунд.Схема управления содсржп переключатель 20 реверса двигателя каретки 5 и концевые выключатели 21 и 22. Б цепь питания двигателя включены контакты 23 исполнительных реле 23 останова двигателя и 24 реле 24 пуска двигателя. Обмотка реле 25 включена в цепь щупа-съемпика и получает питание через контакты 25 программного шаблона, При подаче па схему напряжений питания от источника 19 и положении каретки между концевыми вьцслОчателями, двигатель перемещает каретку в направлении, заданном положением переключателя 20. Как только щуп попадает на очередной контакт шаблона, контакты 25 реле 25...
Установка для механических испытаний материалов по заданной программе

Номер патента: 765696
Опубликовано: 23.09.1980
Авторы: Алексюк, Волощенко, Крохин, Ляпин
МПК: G01N 3/08
Метки: заданной, испытаний, механических, программе
...нагрузки и помещают установку в канал реактора.Поддерживая нулевой уровень входногосигнала, контур регулирования нагрузки обеспечивает перемещение исполнительного привода 8,компенсирующее тепловую деформацию образца и тяг. Послевыхода установки на режим испытанийкорректируют до нуля сигнал ошибкидеформации задатчиком 18 до нулевыхпоказаний измерителя 14, включаетдвухконтурный режим деформации изапускают программу деФормации. Изменяющийся сигнал ошибки деформациипосле обработки блоками 26 и 23 воздействует на вход контура регулиро 765696вания нагрузки, нагружая образец 5, что сопровождается его деформацией, фиксируемой датчиком 6. Некоторое время спустя устанавливается и в дальнейшем поддерживается средняя скорость деформации,...
Предыдущий патент: Устройство для управления адап-тивным роботом
Следующий патент: Временное программное устройство
Случайный патент: Способ контроля разводки между рабочими органами чесальной машины