Система программного управления для робота-манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
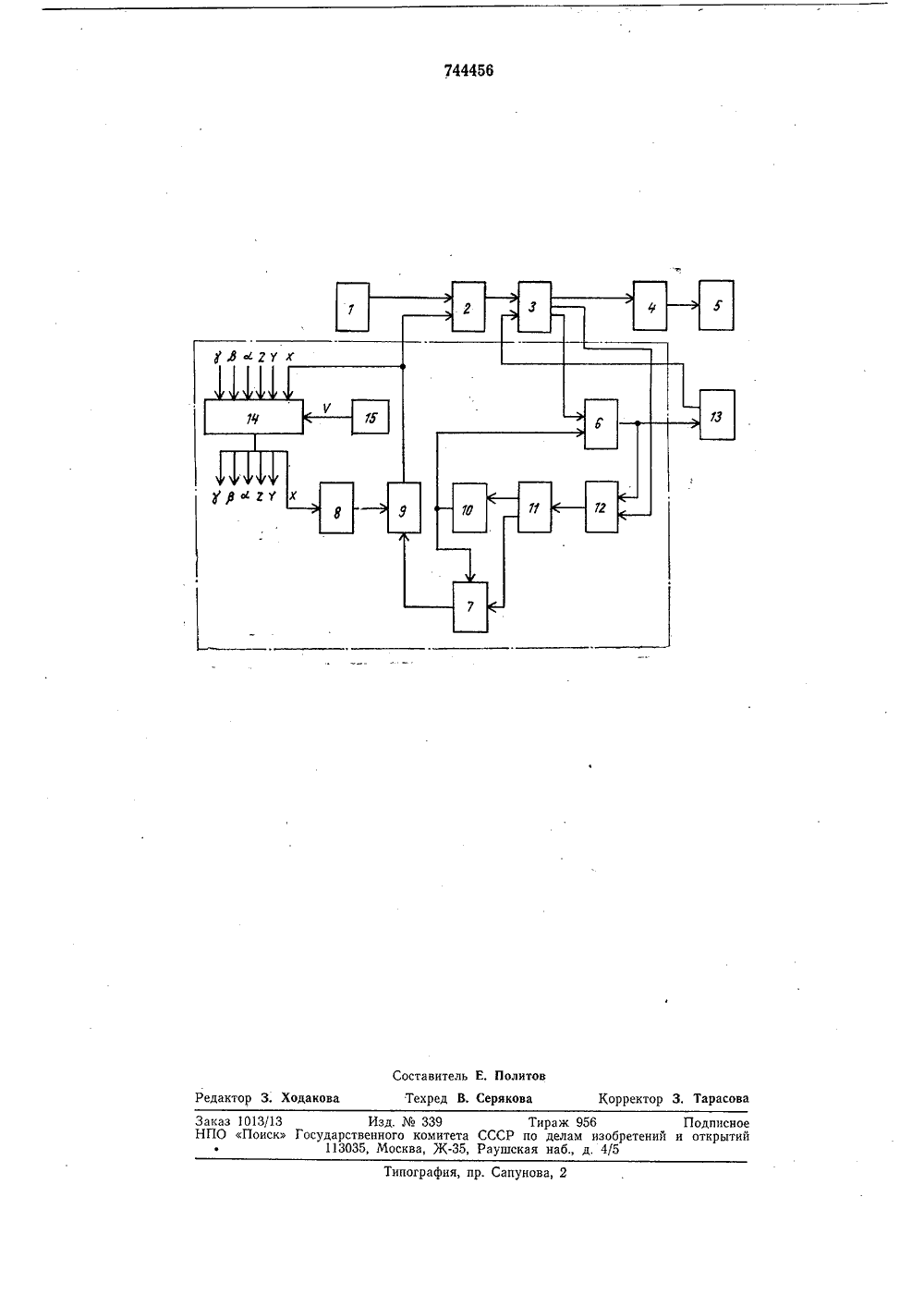
пц 74446 ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Йоав Советских Социалистических Республик) УДК 62-50(088,убликовано 30,06.80, Бюллетень24 по делам изобретений и открытий5) Дата опубликования описания 30,06.8 2) Авторы изобретения в, В. Т. Антоненко и Г. И. Сергац В,С,фе) Заявит Ордена Ленина и ордена Трудового Красного Знамен институт электросварки им. Е. О. Патона54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕН ДЛЯ РОБОТА-МАН И ПУЛЯ ТО РАИзобретение относится к области робото техники и может быть использовано при создании систем управления сварочными ро ботами-манипуляторами,Известна система программного управле ния для робота-манипулятора, содержащая реверсивный счетчик, цифровой умножи тель, вычислительную машину, усилители и приводы исполнительного органа 1. Такая система является сложнои, и низкую скорость записи и не обеспеч контурного управления.Наиболее близким техническим решением к изобретению является система, содер жащая последовательно соединенные блок ручного управления, управляемый генератор, блок коммутации, привод и исполнительный орган, последовательно соединенные элемент И, реверсивный счетчик, цифро-аналоговый преобразователь, нуль-ор. ган, первый блок памяти и регулируемый усилитель, выход которого подключен к второму входу управляемого генератора, второй выход блока коммутации соединен со вторым входом реверсивного счетчика, а третий выход - со вторым входом элемента И, второй вход которого подключен к выходу нуль-органа, а выход - к входу второго блока памяти, выход которого соеди нен со вторым входомции, 21.Недостатком такой системы является невозможность поддержания постоянства требуемой контурной скорости перемещения исполнительного органа в интервалах между программируемыми точками, что снижает его функциональные возможности.Целью изобретения является расширение функциональных возможностей системы.Сущность изобретения заключается в том, что система содержит последовательно соединенные блок коррекции скорости и блок задания скорости, выход которого подключен ко второму входу регулируемого усилителя, выход которого соединен с входом блока коррекции скорости.На чертеже представлена функциональная схема системы,Она содержит блок ручного управления 1; управляемый генератор 2; блок коммутации 3; привод 4; исполнительный орган 5; элемент И 6; блок памяти 7; блок задания скорости 8; регулируемый усилитель 9; нуль-орган 10; цифро-аналоговый преобразователь 11; реверсивный счетчик 12; второй блок памяти 13; блок коррекции скорости 14; блок эталонного сигнала 15; Х У, Л, к, р, у - регулируемые координаты.Система работает следуйщим образом,.3В процессе обучения оператор, воздействуя на рукоятку блока 1 ручного управления, перемещает исполнительный орган 5 в необходимую точку заданной траектории, при этом импульсы с управляемого генератора 2 через блок 3 коммутации поступают одновременно на привод 4 и реверсивный счетчик 12, где происходит алгебраическое суммирование информации о перемещениях от точки к точке, Сигналы о величинах перемещений, зафиксированные в реверсивном счетчике 12, через цифро-аналоговый преооразователь 11, поступают па первый блок памяти 7, который подключен к регулируемому усилителю 9 и устанавливает на нем коэффициент усиления, пропорциональный величине перемещения, зафиксированной в счетчике 12. Сигналы нуль-органа 10, подключенного к цифро-аналоговому преобразователю 11, поступают на один пз входов элемента И 6, Сигнал, пропорциональный величине необходимой контурной скорости сварки, устанавливается оператором в блоке эталонного сигнала 15 перед началом обучения и поступает на блок 14 коррекции скорости, После того как информация о перемещении между точками зафиксирована в реверсивном счетчике 12, она переносится во второй блок памяти 3, При подаче команды Запись блок заданпя скорости 8 вырабатывает напряжение, которое через регулируемый усилитель 9 поступает на управляемый генератор 2. Величина коэффициента усиления усилителя 9 устанавливается первым блоком памяти 7 пропорционально величинам перемещений по координатам. Генератор 2 вырабатывает импульсы с частотой, пропорциональной сигналу, поступающему на его вход. Одновременно сигналы с усилителей 9 поступают на входы Х, У, Л, а, р, у блока 14 коррекции скорости, в котором вычисляется результирующий вектор скорости и вырабатывается сигнал, пропорциональный его величине, сравнивается с величиной сигнала заданной скорости К. Если сигнал результирующего вектора больше заданного, то блок коррекции 14 вырабатывает сигнал на уменьшение напряжения вырабатываемого блоком 8 до тех пор, пока сигнал результирующего вектора, поступающий на генератор 2, не станет равным заданному. Импульсы с генератора 2 через блок коммутации 3 и элемент И 6 с частотой, пропорциональной результирующей величине ско 25 ЗО 35 40 45 50 55 4рости, поступают на вычйтающий вход реверсивного счетчика 12 и в блок памяти 7, После того как вся информация о перемещении исполнительного органа 5 на данном интервале вычтется из реверсивных счетчиков 12, нуль-орган 10 закроет элемент И 6. Одновременно нуль-орган 10 сбросит на ноль первый блок памяти 7, После этого программируют перемещения следующих участков траектории. В автоматическом режиме программа со второго блока памяти 13 через блок коммутации 3 поступает на привод 4, который перемещает исполнительный орган 5,Применение изобретения позволяет за счет введения контурного управления расширить функциональные возможности робота-манипулятора,Формула изобретения Система программного управления дляробота-манипулятора, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блоккоммутации, привод и исполнительный орган, последовательно соединенные элементИ, реверсивный счетчик, цифро-аналоговыйпреобразователь, нуль-орган, первый блокпамяти и регулируемый усилитель, выходкоторого подключен к второму входу управляемого генератора, второй выход блока коммутации соединен со вторым входомреверсивного счетчика, а третий выход -со вторым входом элемента И, второй входкоторого подключен к выходу нуль-органа, а выход - к входу второго блока памяти, выход которого соединен со вторым входом блока коммутации, о т л и ч а ю щ а я с ятем, что, с целью расширения функциональных возможностей системы, она содержитпоследовательно соединенные блок коррекции скорости и блок задания скорости, выход которого подключен ко второму входурегучпруемого усилителя, выход которогосоединен с входом блока коррекции скорости.Источники информации,принятые во внимание при экспертизе1. Спыну Г. А, и др. Промышлснные работы для дуговой сварки,9, 1976, с. 56 -62.2. Авторское свидетельство СССРпо заявке2447236/18-24, кл. В 2 У 9/00,25,02.77 (прототип).дактор 3. Хо Корректор 3. Тарасо ова ипография, пр, Сапуно Заказ 1013/13 Изд.339 Тираж 956 Подписное НПО Поиск Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5
СмотретьЗаявка
2573728, 27.01.1978
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
ФЕДОРОВ ВАЛЕРИЙ СЕРГЕЕВИЧ, АНТОНЕНКО ВЛАДИМИР ТИМОФЕЕВИЧ, СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: программного, робота-манипулятора
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/3-744456-sistema-programmnogo-upravleniya-dlya-robota-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления для робота-манипулятора</a>
Устройство коррекции нуля анологоцифрового преобразователя

Номер патента: 523527
Опубликовано: 30.07.1976
МПК: H03K 13/17
Метки: анологоцифрового, коррекции, нуля, преобразователя
...а ключи 2 и 7 замкнуты. Во время второго такта кл 1 оч 1 замкнут, остальные разомкнуты. На вход усилителя постоянного тока,З поступает исследуемое напряжение Ьи проискодит его преобразование.Автоматическая коррекция нуля производится следующим образом.При поступлении импульсов пилоооразното напряжения от источника линейно-изменяющегося напряжения б происходит срабатывание компараторов 4 и 5. Вход усилителя постоянного тока 3 при этом соединен с общей шиной через ключ 2. В этом случае результат преобразования, определяемый длител ностью интервала времени между срабатываниями компараторов 4, 5, равен суммарному дрейфу нуля усилителя постоянного тока 3 и компараторов 4, 5. Для коррекции дрейфа нуля необходимо достичь такого состоянич схемы,...
Устройство для сопряжения группы операционных блоков с общей памятью

Номер патента: 1444790
Опубликовано: 15.12.1988
Автор: Чабуркина
МПК: G06F 13/00
Метки: блоков, группы, общей, операционных, памятью, сопряжения
...5, и сигналы с информационной шины 14 "Адрес второго операнда" (из операционного блока, который задействован в текущей команде - вырабатывается устройством управления операционного блока после инициирования его работы) совпали, следовательно, выбрана та часть коммутатора 5, которая организует связь операционных блоков в текущей группе, и если на входы одного из узлов 40 коммутации второго операнда (количество которых,подключенных к выходу одного элемента 39 сравнения, соответствует общему количеству операционных блоков)поступил сигнал с выхода памяти 4состояний с шины 33, Фиксированиеначала коммутации осуществляется посигналу с шины 32 "Строб приемакоманды" первыми элементами И 42 узла 40 коммутации. второго операнда.Сохранение...
Выходной блок для устройства обращения к блокам памяти

Номер патента: 630641
Опубликовано: 30.10.1978
Авторы: Караханьян, Копыткин, Стоянов
МПК: G11C 11/40
Метки: блок, блокам, выходной, обращения, памяти, устройства
...3, одна обкладка которого подключена к затвору выходного МДП-транзистора, и втцропо элемента связки, выполнензого на МДПкюнденсаторе 4, одна обкладка которого подключена к источнику постояипопо напряжения Е. Повнциями 5 и 6 5 на чертеже показаны вхюд и выход блока соответственно, а позициям:и 7 н 8 - тактовые ш,ины.Выходной блок работает следующим образом.1 ОВ момент действия тактового сигнала по нтине 7 на затворе выходного МДП-транвчстора устанавлнвается напряжение У, .(У,:или Е/,) Уо, где Уо - пороговоенапря иеище.,После оиончания действия тактового сигнала по шине 7 затвор выходного МДП- транзиотора оказывается под плавающим потенциалом.Если затвор выходного МДП-транзисто О ра находился под напряжением У,(Уо, то...
Устройство для записи информации в блок программируемой постоянной памяти

Номер патента: 955195
Опубликовано: 30.08.1982
Авторы: Поляшов, Соболев, Суворов
МПК: G11C 17/00, G11C 7/00
Метки: блок, записи, информации, памяти, постоянной, программируемой
...такты;Т - начало записи кода а в блокпамяти, 25Т, - конец записи кода О;временной интервал непосредственно записи в блокпамятиУстройство работает следующим об разомо Процесс записи информации в блок памяти можно разбить,на два этапа: первый этап - этап ожидания или этап подготовки информации, когда происхо дит смена адреса и данных, подлежащих записи, и второй этап - этап непосред" ственно работы устройства, который ,состоит из а рабочих тактов, а каждый такт, в свою очередь, подразделя ется на два временных интервала: первый - считывание из блока памяти и второй - запись в блок памяти.На этапе подготовки устанавливается необходимый адрес Ь на выходе ком" 45 мутатора 8 и данные с на выходе блока 1 (Фиг,2),В момент Т с выхода блока 1...
Аналого-цифровой преобразователь савтоматической коррекцией нуля

Номер патента: 805490
Опубликовано: 15.02.1981
Авторы: Будиловская, Волков, Григорович, Сысоев
МПК: H03K 13/17
Метки: аналого-цифровой, коррекцией, нуля, савтоматической
...во время цикла коррекции сохраняется неизменно код нуля.Сигналом с, выхода блока 2 сравнения через элемент НЕ 11 подается разрешение на элемент И 16 для прохождения тактовых импульсов от генератора 19 тактовых импульсов через элемент И 14 к реверсивному счетчикУ 18,через элеМент И 13 дается команданаокончание цикла коррекции, через элемент И 15 производится управлениепроцессом поразрядного уравновешива .)ния.Элементы блока 10 регулирующих резисторов настраиваются так, что в исходном состоянии реверсивного счетчика 18, т.е. в начале каждого циклакоррекции, на информационном выходебуферного усилителя с регулируемымсмещением нуля 27 (Фиг.2) будет присутствовать отрицательное смещениенуля, равное или большее по абсолютной величинеОИд...
Предыдущий патент: Устройство для индентификации линейного объекта
Следующий патент: Устройство для управления станком
Случайный патент: Способ неразрушающего контроля прочности изделий