Способ программирования движенийпромышленного робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
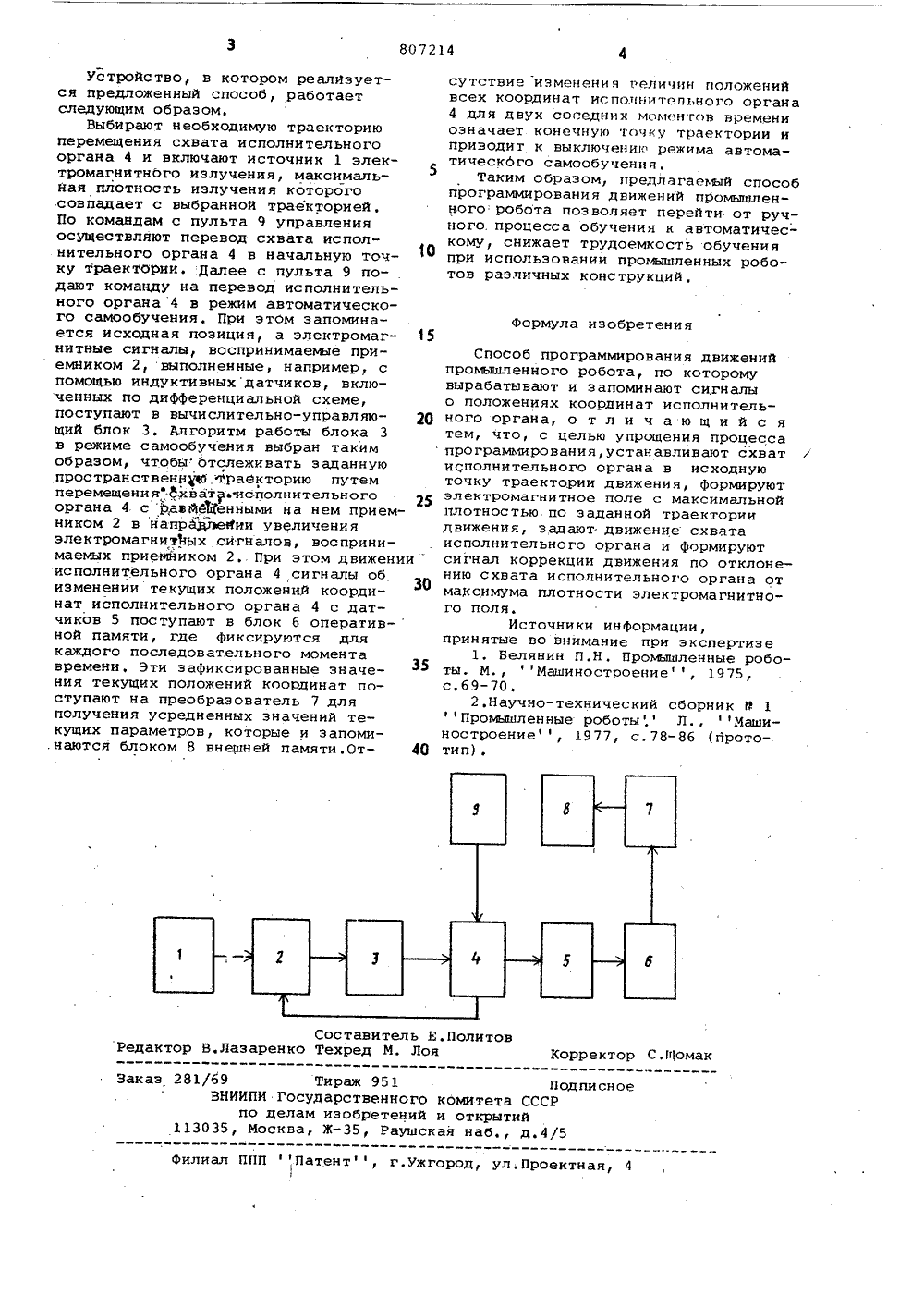
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ Союз СоветскихСоциалистических Республик о 11807214 К АВТОИЗОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено. 070778 (21) 26428 б 8/18-24с присоединением заявки Ио -(22) ПриоритетОпубликовано 23,02,81,Ьоллетеиь ЙВ 7Дата опубликования описания 230281 Я)М, К,з 6 05 В 19/00 В 25 д 9/00 Государственный комитет СССР но дедам нзобретеннй и открытий) ртЕ,Ордена Трудового Красного Знамени эксперимЖИфр 1 рф 1научно-исследовательский институт металлорежущйхстанков(54) СПОСОБ ПРОГРАИИРОВАНИЯ ДВИЖЕНИЙ ПРОЯВЛЕННОГО РОБОТАИзобретение относится к робототехнике и может быть использовано при создании промышленных роботов и манипуляторов с программным управлением. 5Известен способ программирования движений промышленного робота, по которому вручную перемещают схват исполнительного органа по нужной траектории и запоминают положение отдельных координат исполнительного органа робота вдоль всей траектории движения 1.Однако этот способ может быть . . реализован только для тех роботов, 15 у которых возможно ручное перемещение исполнительного органа.Наиболее близким к предлагаемому изобретению является способ, по которому вырабатывают и запоминают сиг налы о положениях координат исполнительного органа при его перемещении по сигналам, задаваемым. на каждую координату 21.Однако процесс программирования 25 по этому способу очень трудоемок, так как требует последовательного управления отдельными степенями подвижности ПР и последующими коррекци- .ями их положения для точного дости= 20 жения нужной точки пространствасхватом "исполнительного органа,Цель изобретения - упрощение про.цесса программирования, . Цель достигается .тем, что устанавливают схват исполнительного органа в исходную точку траектории движения, формируют электромагнитное поле с максимальной плотностью по заданной траектории движения, задают движение схвата исполнительного органа и формируют сигнал коррекции движения по отклонению схвата исполнительного органа от максимума плотности электромагнитного поля. На чертеже представлена функциональная схема способа программирования движений промыапенного робота,устройство реализации предлагаемого способа содержит источник 1 электромагйитного излучения, прием-ник 2 электромагнитного излучения вычислителъно-управляющий блок 3, исполнительный орган 4, датчики 5 положения координат исполнительного органа, блок б оперативной памяти преобразователь 7, блок 8 внешней памяти,пульт 9 уйравления.807214 Формула изобретения Составитель Е. Политовазаренко Техред М. Лоя Редакто к ома Коррект Заказ 281/69ВНИИПИпо113035 р Мо Тираж 951осударственного комитета С лам изобретений и открытий ва, Ж, Раушская наб д Подписное иал ППППатент , г.ужгород, ул.Проектная, 4 Ф Устройство, в котором реализуется предложенный способ, работаетследующим образом,Выбирают необходимую траекториюперемещения схвата исполнительногооргана 4 и включают источник 1 электромагнитного излучения, максимальная плотность излучения которогосовпадает с выбранной траекторией,По командам с пульта 9 управленияосуществляют перевод схвата исполнительного органа 4 в начальную точку траектории. далее с пульта 9 по- .дают команду на перевод исполнительного органа 4 в режим автоматического самообучения. При этОм запоминается исходная позиция, а электромагнитные сигналы, воспринимаеже приемником 2, выполненные, например, спомощью индуктивных датчиков, включенных по дифференциальной схеме,поступают в вычислительно-управляю- Щщий блок 3. Алгоритм работы блока 3в режиме самообучения выбран такимобразом, чтобыотслеживать заданнуюпространственнрб,траекторию путемперемещения хВатфафисполнительнОГОоргана 4. с равФМКенными на нем приемником 2 в нанрйддейии увеличенияэлектромагнитных сигналов, воспринимаемых приеяником 2. При этом движенииисполнительного органа 4 сигналы обизменении текущих положений координат исполнительного органа 4 с датчиков 5 поступают в блок 6 оператив-ной памяти, где фиксируются длякаждого последовательного моментавремени, Эти зафиксированные значения текущих положений координат поступают на преобразователь 7 дляполучения усредненных значений текущих параметров, которые и запоми.наются блоком 8 внешней памяти.От сутствие изменени я величин положенийвсех координат исполннтепьного органа4 для двух соседних момен гон времениозначает конечную ияку траектории иприводит к выключения режима автоматическЬго самообучения,Таким образом, предлагаемый способпрограммирования движений п 1 омышленного робота позволяет перейти от ручного процесса обучения к автоматическому, снижает трудоемкость обученияпри использовании промышленных роботов различных конструкций,Способ программирования движенийпромышленного робота, по которомувырабатывают и запоминают сигналыо положениях координат исполнительного органа, о т л и ч а ю щ и й с ятем, что, с целью упрощения процессапрограммирования, устанавливают схватисполнительного органа в исходнуюточку траектории движения, формируютэлектромагнитное поле с максимальнойплотностью по заданной траекториидвижения, з,адают движение схватаисполнительного органа и формируютсигнал коррекции движения по отклонению схвата исполнительного органа отмаксимума плотности электромагнитного поля.Источники информации,принятые во внимание при экспертизе1. Белянин П,Н. Промышленные роботы. М., Машиностроение, 1975,с.69-70.2.Научно-технический сборник Р 1Проьыаленные роботы, Л., Машиностроение, 1977, с.78-86 (йрототип),
СмотретьЗаявка
2642868, 07.07.1978
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИЭКСПЕРИМЕНТАЛЬНЫЙ НАУЧНО ИССЛЕДО-ВАТЕЛЬСКИЙ ИНСТИТУТ МЕТАЛЛО-РЕЖУЩИХ CTAHKOB
БЕЛОВ ВАСИЛИЙ СЕРГЕЕВИЧ, КОЗЫРЕВ ЮРИЙ ГЕОРГИЕВИЧ, ВЕЛИКОВИЧ ВЛАДИМИР БЕНЦИАНОВИЧ, КАНАЕВ ЕВГЕНИЙ МАКСИМОВИЧ, ЖИТОМИРСКИЙ СЕРГЕЙ ВИКТОРОВИЧ, ОСТАПЧУК ВИКТОР ГРИГОРЬЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: движенийпромышленного, программирования, робота
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/2-807214-sposob-programmirovaniya-dvizhenijjpromyshlennogo-robota.html" target="_blank" rel="follow" title="База патентов СССР">Способ программирования движенийпромышленного робота</a>
Устройство для записи координат траекторий движения ковша драглайна

Номер патента: 546684
Опубликовано: 15.02.1977
МПК: E02F 3/48
Метки: движения, драглайна, записи, ковша, координат, траекторий
...На роторе 7 каждого20 сельсина-приемника расположен вал 8. Наверхней части вала находится барабан 9 свстречно запасованными тросиками 10, 11,Диаметры барабанов 9, 12 соответствуют вмасштабе диаметрам барабанов лебедок.) В нпжнеи части каждого вала установлены соответственно крестовины 13, 14, каждая пз которых может вращаться вокруг оси соответствующего вала. В крестовинах установлены на подшипнике скольжения соответственно10 15 20 25 30 штанги 15, 16. Штанга 15 устдноглсна в крестовине 13 на подшипнике скольжения 17.Каждая штанга соединена с ротором соответствующего сельсина-приемника с помощью тросиков 10, 11 и 18, 19. Один конец каждого тросика закреплен на конце соответствующей штанги, а другой - на соответствующем барабане, причем...
Устройство для формирования координат траекторий движения объектов

Номер патента: 1721625
Опубликовано: 23.03.1992
Авторы: Ветерис, Ветярис, Воронов, Кучинскас
МПК: G09G 1/00
Метки: движения, координат, объектов, траекторий, формирования
...адреса с выхода блока 5 памяти поступает на информационные входы регистра 6, куда заносится синхронизирующим импульсом с выхода элемента 10 задержки. С информационных выходов регистра 6 базовый адрес подается на одни информационные входы сумматора 7, к другим информационным входам которого подключены выходы счетчиков текущего адреса через блоки 18 - 20 элементов И и блок 21 элементов ИЛИ,С выхода элемента И 4-1 импульс поступает не только на вход считывания фиксированной ячейки памяти блока 5, но и на вход счетчика 17-1, фиксирующего факт поступления координат объекта с данным номером. Учитывая, что в данный момент высоким потенциалом дешифратора 3 открыты элементы блока 18 элементов И, товыходы счетчика 17-1 через блок 18 элементов И и...
Способ управления движением промышленного робота

Номер патента: 729552
Опубликовано: 25.04.1980
МПК: G05B 19/00
Метки: движением, промышленного, робота
...значительно повысить точность стабилизации скорости движения рабочего органа робота при использовании оборудования неортогональной струк- турыа Формула изобретения Источники информации,принятые во внимание при экспертизе1. Проспект фирмы Сименс навыставке технологического оборудования в Ганновере 1973, Система81 пцшег 1 ЕК,2. Способы подготовки программи интерполяторы для контурныхсистем числового управления станками, М Машиностроение, 1970,с.88-93. Составитель Г.МилославскийРедактор Л,Гребенникова Техрел Н. Бабурка КорректорЯ,Веселовская Заказ 1259/40 Тираж 956 Подписное ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Филиал ПП 1 Патент, г. Ужгород, улПроектная, 4 Это...
Устройство для управления движением адаптивного робота

Номер патента: 716807
Опубликовано: 25.02.1980
Авторы: Каляев, Носков, Чернухин
МПК: B25J 3/00
Метки: адаптивного, движением, робота
...элемента 4 появляется О,а ца втором вьходе, сосдиСцом со вторым входом. появляется сцга 1. Если рассматри. вгсмый участок поверхности содержит препятстшс дчя робота, то на Обоих выкодахпарыоявляется О. Если же в рассматриваемом СТКС НЗХОДИТСЯ ЦСПЬ. ВЧПРСВЛСНИИ КОТО оои робот лод;.сн псСмс аться, то на обоих эыходдах ) нары появл 1 ется 1. ХпцМи словами, у"асткам среды, содсожащим препятствия соответствуют блокированные, спроводящие ключсвыс элементы 4, участк: без препятствий соовстствуют проводящие ккгчевые элементы 4, а участкам содеркащим цель соответствучот цроводяццс ключевьц элементы 4, гецерирукнцпс сдиццчпыс сигналыкоторые проходят через проводящие косвьс элементы 4 и це ггрохолят через заблокирсвацыс, цепроводяцие...
Способ определения перемещения рабочего органа исполнительного механизма гидропривода

Номер патента: 1377497
Опубликовано: 28.02.1988
МПК: F15B 19/00
Метки: гидропривода, исполнительного, механизма, органа, перемещения, рабочего
...Москва, Ж, Раушская наб д,4/5ф.Производственно-полиграфическое предприятие, г,ужгород, ул,Проектная,4 Изобретение относится к машино-,.строению и может быть использовано всистемах автоматического управлениягидроприводами. Цель изобретения - повышение надежности при эксплуатации в условиях с повышенной вибрацией, влажностью, температурой. 30 Предлагаемый способ осуществляетсяследующим образом.115 При работе гидропривода измеряют расход, температуру и давление .в гид ролинии питания исполнительного механизма и по предварительно полученной зависимости перемещения рабочего ор гана исполнительного механизма от расхода в гидролинии питания при различных значениях температуры и давления рабочей жидкости определяют величину перемещения рабочего...
Предыдущий патент: Система программного управленияпромышленным роботом
Следующий патент: Устройство для программногоуправления многокоординатнымманипулятором
Случайный патент: Электрическая машина с комбинированным магнитным подвесом ротора