Система программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
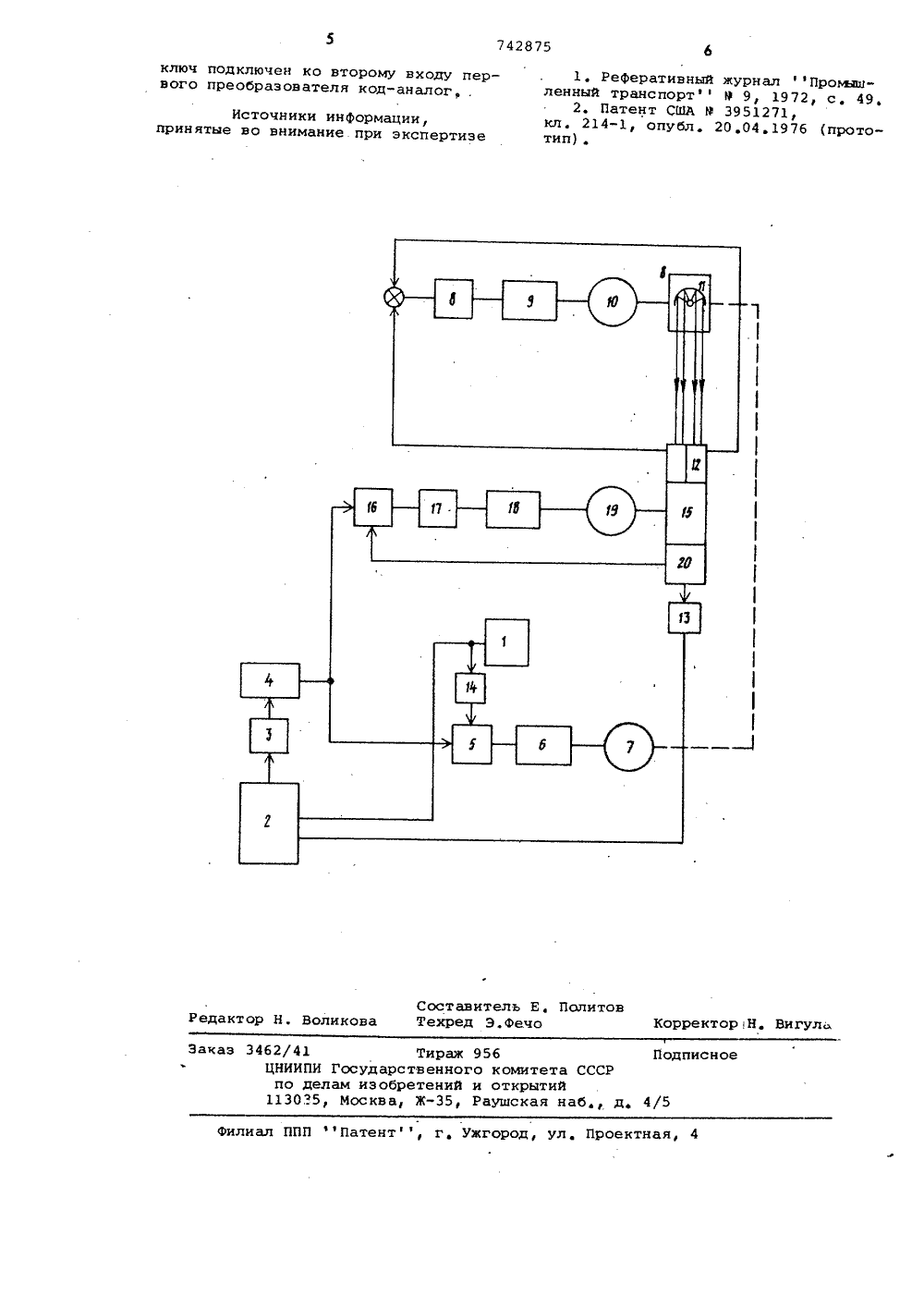
Сою Советских Социалистических Республик(22) Заявлено 070378 (21) 2589577/18-24с присоединением заявки Ио(51)М. Кл.О 05 В 19/00 В 25 ,7 9/00 Государственный комнтет СССР оо делам нюбретеннй н открытий(72) Авторы изобретения М. С. Ворошилов, С, Н. Андреенко и Е. Р, Петров Завод-втуз при Ленинградском Металлическом заводе имени ХХ 11 съезда КПСС(54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМИзобретение относится к областиробототехники и может быть использовано при создании систем программного управления манипулятором с повышенной точностью,5Известная система программного управления манипулятором (Ц, содержащая исполнительный и задающий механизмы, связанные между собой следящими или обратившими следящими приводами с датчиками положения и момента,имеет низкую точность,Наиболее близким техническим решением к данному изобретению является система 23, содержащая последовательно соединенные блок обучения,блок записи программы, блок считывания, блок оперативной памяти, первый преобразователь код-аналог, перВый усилитель мощности и первый двигатель, связанный с исполнительныммеханизмом мапипулятора, последовательно соежиненные второй усилительмощности и второй двигатель, связанный с исполнительным механизмом манипулятора,Недостатком этой система является низкая точность позиционированияпри наличии нежестких кинематических цепей, связывающих датчики положения с рабочими органами манипулятора.Цель изобретения - повышение точности системы,Для этого система содержит установленный на исполнительном механизме манипулятора источник излучения, установленный вне рабочей зоны с ма" нипулятора приемник излучения, первый и второй ключи, кодовый датчик положения премника излучения и последовательно соединенные блок сравнения кодов, второй преобразователь код - аналог, третчй усилитель мощности и третий двигатель, связанный через механизм перемещения приемника с кодовым датчиком положения при" емника излучения, выход которого под. ключен к первому входу блока сравнения кодов и входу первого ключа, выход которого соединен со вторым входом блока записи программы, выход приемника излучения подключен через первый двигатель ко входу первого усилителя мощности, выход блока оперативнсй .памяти соединен со вторым входом блока сравнения кодов, а выход блока обучения через второй ключ742875 10 20 Формула изобретения подключен ко второму входу преобразователя код-аналог,На чертеже представлена функциональная схема системы, Система содержит блок обучения 1, блок записи программы 2, блок считывания 3, блок оперативной памяти 4, первый преобразователь код-аналог 5, первый усилитель мощности б, первый двигатель 7,исполнительный механизм 8 манипулятора, второй усилитель 9 мощности,второй двигатель 10, источник 11 излучения, приемник излучения 12, первый ключ 13, второй ключ 14, механизмперемещения приемника излучения 15,блок сравнения кодов 16, второй преобразователь код-аналог 17, третийусилитель мощности 18, третий двигатель 19 и кодовый датчик положения 20 . Система работает следующим образом.Манипулятор с программным управлением может быть использован в обычном режиме копирующего манипулятораили в автоматическом режиме при прог-раммном управлении, 25В автоматическом режиме инФормации о программе считывается с программной ленты блока записи програмвь 2 блоком считывания 3 и вводитсяв блок оперативной памяти 4. Из блока оперативной памяти 4 информацияпоступает в схемы управления приоритетным и неприоритетным движениями,В схеме управления приоритетнымдвижением информация поступает в блоксравнения кодов 16, преобразуется всигнал упраьления в преобразователь17 и усиливается в усилителе мощности 18, Сигнал управления поступаетна третий двигатель 19, который привОдит в движение механизм 15 с приемником излучения 12,Движение механизма 15 вызываетперераспределение интенсивности излучения в качестве которого могутбыть использованы свет,-излучение,луч лазера и им подобные, источники11, падающие на приемник 12, Сигналы с приемника 12 поступают во вто.рой усилитель мощности 9 и через него подаются на второй двигатель, врезультате чего перемещается исполнительный механизм манипулятора 8.Исполнительный механизм 8, приводиьий в движение двигателем 10, переместит источник излучения 11 такимобразом, что освещенность приемника12 вновь станет одинаковой, Такимобразом исполнительный механизм 8воспроизводит траекторию движения,заданную программой. Движение механизма 15 контролируется кодовым датчиком 20, сигналы которого поступаютв блок сравнения кодов 16.В схеме управления кеприоритеткымдвижением информация поступает черезвторой преобразователь код-аналог 17 65 и усилитель мощности 6 ка первый двигатель 7, ко-.орый обеспечивает необхоцимое перемещение исполнительногомеханиэма манипулятора 8 при обходевстречающихся препятствий, Если в результате этого смещается источник излучения 11, то второй двигатель 10,включенный в следящую систему с приемником 12, ликвидирует это смещениеавтоматически,Система управления манипуляторомпредусматривает режим обучекия, Вэтом режиме задающий механизм перемещается от ручного привода, одновременно подаются сигналы от блока обучения 1 через второй ключ 14 на первый двигатель 7. Сигналы от кодовогодатчика 20 через первый ключ 13 исигналы из блока обучения 1 поступают в блок записи программы 2,Применение системы позволит повысить точность позиционирования программного управления манипулятором в режиме автоматической обработки программы. Система программного управления манипулятором, содержащая последовательно соединенные блок обучения, блок записи программ, блок считывания, блок оперативной памяти, первый преобразователь код-аналог, первый усилитель мощности и первый двигатель, связанный с исполнительным механизмом манипулятора, последовательно соединенные второй усилитель мощности и второй двигатель, связанный с исполнительным механизмом манипулятора, отличающаяся тем, что, с целью повышения точности системы, она содержит установлеккый на исполнительном механизме манипулятора источник излучения, установленный вне рабОчей зоны с манипулятора приемник излучения, первый и второй ключи, кодовый датчик положения приемника излучения и последовательна соединенные блок сравнения кодов, второй преобразователь код-аналог, третийусилитель мощности и третий двигатель, связанный через механизм перемещения приемника с кодовым датчиком положения приемника излучения, выход которого подключен к первому входу блока срав-. нения кодов и входу первого ключа, выход которого соединен со вторым входом блока записи программы, выход приемника излучения подключен через первый двигатель ко входу первого усилителя мощности, выход блока оперативной памяти соединен со вторым входом блока сравнения кодов, а выход блока обучения через второй742875 ключ подключен ко второму входу первого преобразователя код-аналог, . Источники информации,принятые во внимание при экспертизеСоставительРедактор Н. Воликова Техред Э.фе итов Корректор;Н, Вигул 56 Подписноекомитета СССРоткрытийаушская наб д, 4/5 к Филиал ППП ффПатент ф, г, Ужгород, ул. Проектная, 4 3462/41ЦНИИПИ Государпо делам изоб113035, Москва ТиражвенитениЖ1, Реферативный журнал Промышленный транспортф 9 9, 1972, с. 49,2. Патент США Р 3951271,кл. 214-1, опубл. 20.04.1976 (прототип) .
СмотретьЗаявка
2589577, 07.03.1978
ЗАВОД-ВТУЗ ПРИ ЛЕНИНГРАДСКОМ МЕТАЛЛИЧЕСКОМ ЗАВОДЕ ИМ. ХХ11 СЪЕЗДА КПСС
ВОРОШИЛОВ МСТИСЛАВ СЕРГЕЕВИЧ, АНДРЕЕНКО СЕРГЕЙ НИКОЛАЕВИЧ, ПЕТРОВ ЕВГЕНИЙ РОМАНОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: манипулятором, программного
Опубликовано: 25.06.1980
Код ссылки
<a href="https://patents.su/3-742875-sistema-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления манипулятором</a>
Устройство для измерения мощности на валу двигателя

Номер патента: 682775
Опубликовано: 30.08.1979
МПК: G01L 3/10
Метки: валу, двигателя, мощности
...напряжениячерез усилитель 14 поступает на второй вход блока 8 умножения. В блоке умножения происходит перемножение этого сигнала на сигнал измерителя 1 электродвижущей силы статора, поступаюцего на первый вход блока 8 умножения,Сигнал с выхода блока 8 умножения, пропорциональный крутящему моменту без учета момента механических потерь, складывается с выходным напряжением делителя, снимаемым с резистора 7, которое устанавливается пропорциональным моменту механических потерь переменным резистором б. При этом питание делителя осуществляется от стабилизированного реверсивното источника 4 напряжения.Суммарный сигнал, пропорциональный крутящему моменту, является выходом устройства, может быть, использован как для подключения...
Тепловой двигатель регулируемой мощности и рекуперированием энергии

Номер патента: 1726827
Опубликовано: 15.04.1992
Автор: Мясников
Метки: двигатель, мощности, регулируемой, рекуперированием, тепловой, энергии
...блоков. В качестве рабочего тела можно, например, использовать гелий под давлением до 20 МПа, При нагревании газа его давление повышается, но повышается оно неравномерно по окружности полостей роторно-статорного блока 1, Происходит это потому, что противоположный ротор занимает развернутое положение и количество рабочего тела неравномерно распределяется по горячим и холодным полостям. В тех полостях, где массовое распределение рабочего тела смещено в сторону горячих полостей, внутреннее давление полостей существенно превышает давление в полостях с противоположным распределением рабочего тела, Давление рабочего тела, направленное перпендикулярно внешней поверхности обоймы роликового подшипника 41 качения, за счет эксцентриситета ротора...
Управляющий блок для системы управления двигателем внутреннего сгорания

Номер патента: 176750
Опубликовано: 01.01.1965
Авторы: Ошенский, Подлиповский
МПК: F02D 35/00, G05B 6/05
Метки: блок, внутреннего, двигателем, сгорания, системы, управляющий
...органа, Последний включет двухпозиционный подпружиненный клапи, который состоит из мембраны 11, зслонок 12 ц 13 и сопел 14 и 15.10 Для регулировки чувствительности управляющее соцло 1 с 1 выполнено подвижным и перемещается в вертикальном направлении при помощи клина 16 и винта 17. Кроме того, в средней части нходится постоянный дрос сель 18, обеспечивющий незначительный расход воздух через управляющую полость А зпорного органа. При включении блока рычаг 1 принимает положение, при котором упор 2 опирается и упор 8, заслонка 9 за крывет сопло 10 ц давление воздуха в управляющей полости А резко возрастает, Это давление, воздействуя ня мембрану 11 клапангя, переставляет его в нижние положение, нри котором полость питания Б соединяется с 25...
Блок жиклеров для карбюратора двигателя внутреннего сгорания

Номер патента: 533747
Опубликовано: 30.10.1976
Автор: Буданов
МПК: F02M 19/02
Метки: блок, внутреннего, двигателя, жиклеров, карбюратора, сгорания
...несколько превышает размер этого отверстия. Если проточный канал 5 ци 5334линдрический, то гофр выполнен кольцевым. Пластина 1 выполняется из тонкого листового материала, например, толщиной 0,3 - 0,4 мм и имеет форму выбираемую из компоновочных требований карбюратора. Пластина 1 с одной стороны выполнена закругленной, а с другой стороны - с прямыми углами. Сначала в пластине выполняются штамповкой гофры 8, а затем - выштамповка 2 с отверстиями 3, выполненными прошивкой, Выпуклая часть гофров 8 и выштамповки 2 должны выступать над плоскостью пластины 1 в сторону движения рабочей среды в проточном канале 5.Блок жиклеров с одним направлением рабочей среды для всех жиклеров устанавливается в разъеме крышки 7 и корпуса 6 карбюратора, при...
Блок детектирования альфа-излучения

Номер патента: 560489
Опубликовано: 30.09.1978
МПК: G01T 1/18
Метки: альфа-излучения, блок, детектирования
...того, для эффективной дезактивации измерительной камеры цли ес замены предусмотрена возможность простой выемки из ее корпуса блока детектирования.На фиг. 1 изображен предлагаемый блок детектирования альфа-излучения, поперечный разрез; на фиг, 2 - разрез Л - Л на фиг. 1; на фиг. 3 - узел 1 на фиг. 2,Блок детектирования альфа-излучения состоит из корпуса 1 и блока электронного умноцсителя 2, соединенных между собой. Корпус 1 состоит из основания, двух боковых, задней и передней, стенок. Торцы передней и задней стенок имеют П-образные выступы, а боковые стенки - такие же впадины, препятствующие попаданию света внутрь корпуса. В корпусе 1 находится измерительная камера 3 для размещения препарата на различных расстояниях от5604...
Предыдущий патент: Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой
Следующий патент: Устройство для программного управления
Случайный патент: Эндопротез