G05B 19/00 — Системы программного управления
Устройство для автоматического управления подачей изделий загрузочным и транспортным механизмами

Номер патента: 1105864
Опубликовано: 30.07.1984
Авторы: Князев, Пискунов, Рябов
МПК: G05B 19/00
Метки: загрузочным, механизмами, подачей, транспортным
...блок задания разрешающих потенциалов 13, З 0одновибратор 14, элемент ИЛИ 15, ключевой элемент 16, элемент задержки17, формирователь импульса 18, элемент задержки 19, формирователь им.пульса 20, элемент ИЛИ 21, ключевойэлемент 22,На временной диаграмме обозначено:а,б - сигнал на входе приемника 2;в - сигнал на входе частотного компаратора 6; ъ - сигнал на выходе40элемента задержки 7; д - сигнал навыходе формирователя импульса 10;В - сигнал на выходе элемента ИЛИ 11;х - сигнал с первого выхода блоказадания разрешающих потенциалов 13; 453 - сигнал с выхода элемента И 12;и - сигнал с первого выхода одновибратора 14, к - сигнал с выхода элемента ИЛИ 15; л - сигнал с второговыхода блока 13; м - сигнал с выхода Оключевого элемента 16; н -...
Формирователь управляющих импульсов
Номер патента: 1123100
Опубликовано: 07.11.1984
Автор: Черников
МПК: G05B 19/00, H03K 5/00
Метки: импульсов, управляющих, формирователь
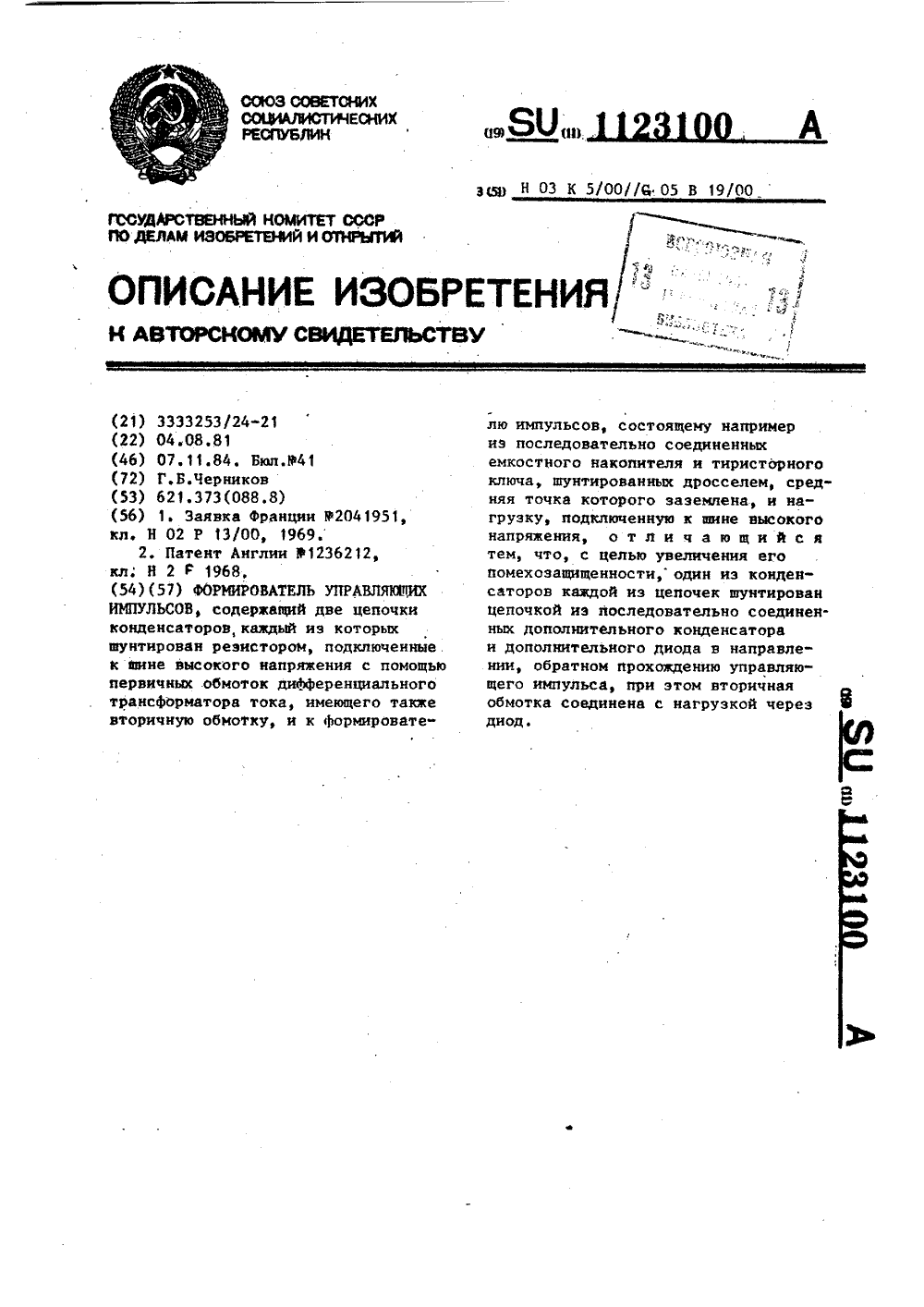
...обмотка соединена с нагрузкой через диод.На чертеже изображено предлагаемое устройство.Конденсаторы 1 шунтированы резисторами 2, дифференциальный трансформатор 3 тока имеет вторичную обмотку, которая через диод 4 подключенак нагрузке 5, связанной с шиной высокого напряжения, емкостной накопитель 6 формирователя управляющихимпульсов через тиристорный ключ 7 формирователя управляющих импульсов подключен к цепочкам конденсаторов 1 и шунтирован дросселем 8, средняя точка которого заземлена, последовательные цепочки, состоящиеиз дополнительных диодов 9 и дополнительных конденсаторов 1 О, включены в направлении, обратном прохождению управляющего импульса.Устройство работает следующим образом,При срабатывании тиристорного ключа 7...
Устройство для управления манипулятором

Номер патента: 1124248
Опубликовано: 15.11.1984
Авторы: Аболь, Горбатовский, Залькинд, Люманов
МПК: G05B 19/00
Метки: манипулятором
...введены последовательносоединенные блок адреса, блок памятии блок умножения, входы которого соединены с выходами задатчика сигналов, а выходы - с входами приводов,40а входы блока адреса подключены квыходам датчиков положения.На фиг. 1 изображен манипуляторлесозаготовительной машины; нафиг. 2 - функциональная схема устрой 45ства; на фиг. 3 - функциональнаясхема блока умножения; на фиг. 4 -градуированная сетка рабочей зонытранспортных звеньев манипулятора 1на фиг. 5 - границы ячейки рабочейзоны транспортных звеньев манипу 50лятора. Манипулятор лесозаготовительной машины (фиг. 1) содержит основание 1, транспортные звенья 2 и 3 и ориен5 тирующие звенья 4 и 5, которые поворачиваются на углы ЦЙ 2, Й 3 иУстройство для управления...
Устройство для управления процессом очистки электродов

Номер патента: 1140096
Опубликовано: 15.02.1985
Авторы: Алекса, Балжекас, Ветерис, Волкас, Дайлиде, Кучинскас
МПК: G05B 19/00
Метки: процессом, электродов
...счетчика импульсов через элемент задержки соединен с вторым входом блока сравнения, а через счетчик числа циклов - с третьим входом блока сравнения, выход третьего элемента И подключен к первому входу третьего триггера, соединенного выходом с вторым входом второго клапана, а вторым входом - с шестым входом устройства, седьмой вход которого подключен к второму входу задающего регистра. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - примерконкретного конструктивного выполнения исполнительного блока,Устройство включает генератор 1импульсов времени, первый 2, второй 3, третий 4 и четвертый 5 эле-менты И, первый 6, второй 7 и третий 8 триггеры, ключ 9, источник переменного напряжения 10, первый счетчик импульсов 11, счетчик циклов...
Устройство для управления адаптивным роботом

Номер патента: 1150616
Опубликовано: 15.04.1985
МПК: G05B 19/00
Метки: адаптивным, роботом
...усилитель 14, второй привод 15, второй датчик 16 положения, третий усилитель 17, третий привод 18, третий датчик 19 положения, источник 20 опорного сигнала, первый и второй сумматоры 21 и 22 соответственно, первые, второйи третий нуль органы 23, 24 и 25 соответственно, первый элемент И 26, первый и второй ключи 27 и 28 соответственно, второй элемент И 29, 3 1150 третий и четвертый ключи 30 и 31 соответственно, пороговый элемент 32,Устройство работает следующим образом.С блока 2 задания программы на 5 приводы 5 исполнительного органа 12 и приводы 15 и 18 каретки 1 подают - ся сигналы, по которым схват 6 и каретка 1 выходят в заданное программой положение. Отработка программы осуществляется в следящем режиме путем сравнения заданного...
Цикловая система программного управления промышленным роботом

Номер патента: 1151927
Опубликовано: 23.04.1985
Авторы: Аношкин, Афанасьев, Винник, Шевченко
МПК: G05B 19/00
Метки: программного, промышленным, роботом, цикловая
...по каждой регулируемой координате дополнительно КЬ-триггера и четвертого элемента И позволяет исключить выдачу разрешающего сигнала с выхода второго элемента И на вход первого элемента И по регулируемой координате схвата робота, в которой произошел отказ датчика положения.На чертеже представлена функциональная схема предлагаемой системы.Система содержит первый элемент И 1, коммутатор 2 кадров, программоноситель 3, дешифратор 4, элементы ИЛИ 5, третьи элементы И 6, приводы 7, датчики 8 положения, вторые элементы И 9, инверторы 10, четвертые элементы И 11, Ю-триггер 12.50 55 Выход первого элемента И 1 соединен через коммутатор 2 с программоносителем 3, выход которого через дешифратор 4 соединен с входами элемента ИЛИ 5 по каждой...
Устройство для учета листовых перемещающихся изделий и управления разделочным агрегатом
Номер патента: 1170427
Опубликовано: 30.07.1985
Авторы: Бадолин, Вышинский, Котельников, Кузнецов, Тимшин, Чернышов, Шнайдер
МПК: G05B 19/00, G06M 7/02
Метки: агрегатом, листовых, перемещающихся, разделочным, учета
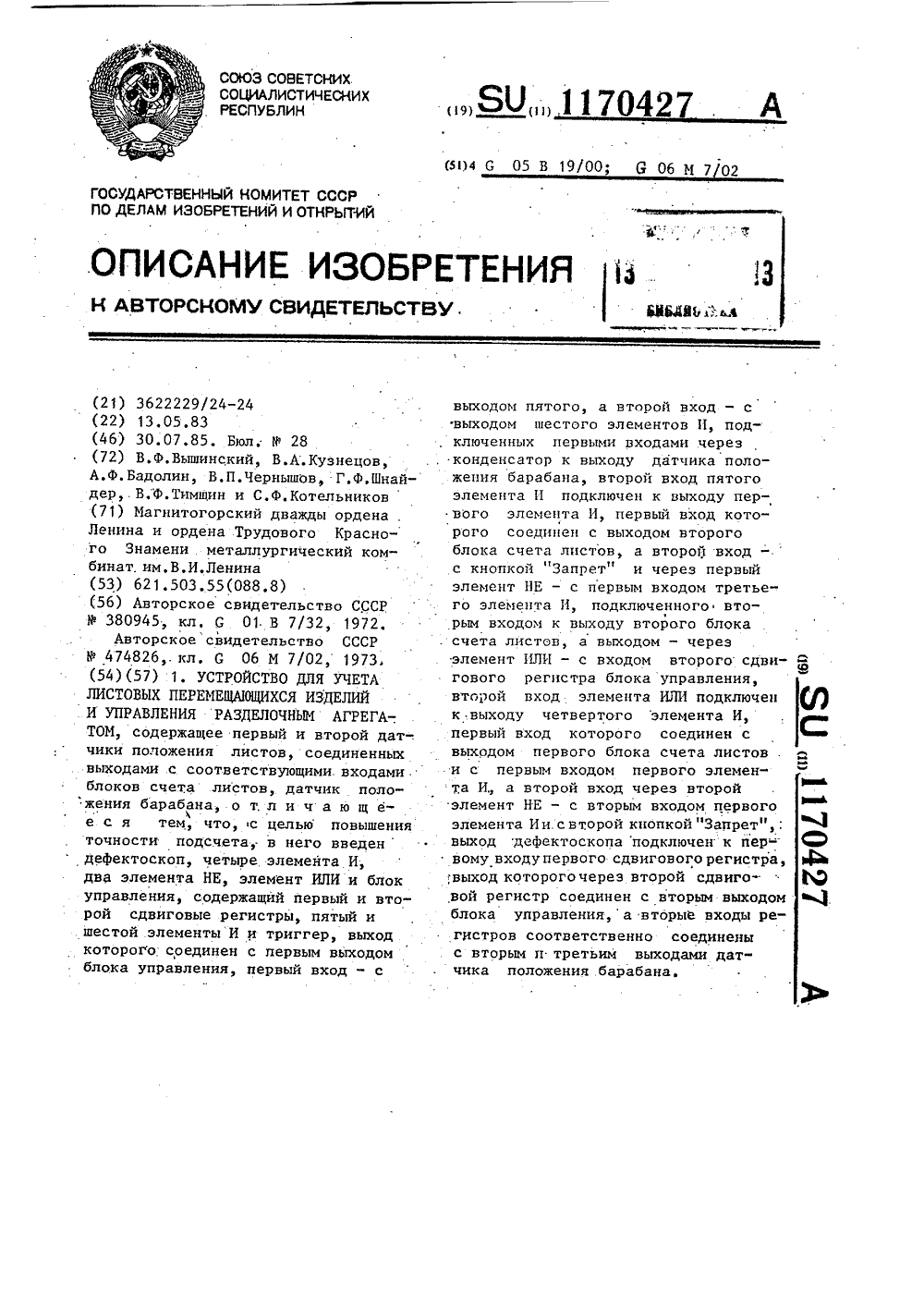
...34 подключен к выход котоРого соединен с пеРвым первому входу сдвигового регистра 16, выходом элемента 10 И, второй вход выход. которого через сдвиговой рекоторого подключен к первому вхо- гистр 17 соединен с переключающим ду элемента 7 И и к входу блока 3электромагнитом 35 укладчика неконсчета листов, другой вход элементавторые входы регист И подключен к выходу элемента З диции 36 а Р 12 И, а выход задатчика 14 количест- Ров "6 "оосоответственно соеди нены со вторым и третьим выходами ва листов через элемент совпадения9-к выходу блока 3 счета листов. датчика 23 поатчика 23 положения барабана. КроЗлок 15 управления содержит ме того, обозначены: нарезаемая полоУсдвиговые регистры 16 и 17, эле са 37, рулон 38.з 117Устройство...
Устройство для управления промышленным роботом
Номер патента: 1170428
Опубликовано: 30.07.1985
Авторы: Коломенцев, Кузнецов, Фурман
МПК: B25J 9/00, G05B 19/00
Метки: промышленным, роботом
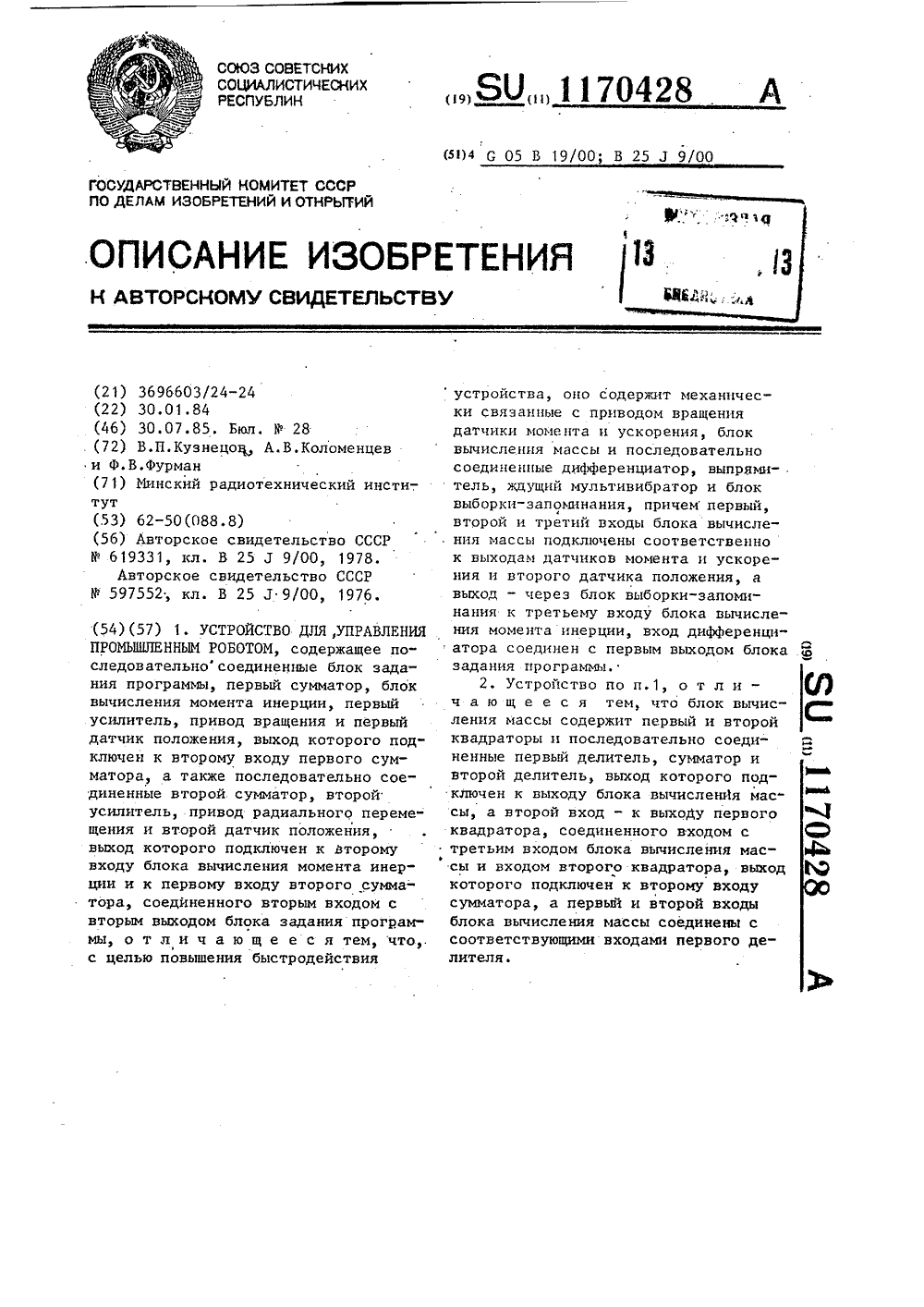
...7, второй усилитель 8, 20привод 9 радиального перемещения,второй датчик 10 положения, датчик 11момента, датчик 12 ускорения, блок 13вычисления массы, дифференциатор 14,выпрямитель 15, ждущий мультивибратор 2516, блок 17 выборки-запоминания..т,Блок вычисления массы (Иг.2)включает первый делитель 18, первый19 и второй 20 квадраторы, сумматор21 и второй делитель 22, 30На Фиг.З указаны функциональныйблок 23, суюатор 24, делитель 25 иблок 6 фиксации уровня,Устройство работает следующим образом.В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы;.на первом его выходе появится сигнал, соответствующий требуемому перемещению привода 40 5 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от...
Устройство для управления адаптивным роботом

Номер патента: 1188700
Опубликовано: 30.10.1985
Авторы: Анопреенко, Солодилин, Франко
МПК: G05B 19/00
Метки: адаптивным, роботом
...элемент И 13 имеет на выходе О, ключ 16 закрыт, триггер 8 установлен в нулевое состояние, ключ 15 открыт, С блока 12 запоминания программы подается команда на сжатие губок 2 схвата 1. Эта команда через открытый ключ 15 поступает на привод 9 сжатия губок 2, и они начинают сжиматься. Когда губки 2 схвата 1 коснутся детали 3, срабатывают тактильные датчики 11, элемент И 13, ключ 16 открывается и команда на подъем схвата 1 проходит от блока 12 через открытый ключ 16 на привод 10 подъема схвата 1, последний начинает подъем. Губки 2 схвата 1 продолжают сжиматься, сильнее охватывая деталь 3. Однако из-за недостаточного сжатия губок 2 деталь 3 проскальзывает в них, продолжая опираться на поверхность стола. По мере увеличения сжатия...
Устройство для управления сборочным роботом

Номер патента: 1200242
Опубликовано: 23.12.1985
Авторы: Дорохов, Егоров, Немонтов
МПК: G05B 19/00
...фазу взаимного пере.коса (поисковые движения).В моменты времени, соответствующие крайним положениям в движении объекта, то есть,в положении упора подвижного объекта внеподвижный, взаимное перемещение ввиду заклинивания невозможно. При смене фазы упораподвижный сопрягаемый объект проходит черезположение, соответствующее промежутку междудвумя противоположными упорами, и тем самымоказывается свободным от силовых связей,налагаемых неподвижным объектом. В течениевремени, соответствующего движению междудвумя упорами подающего движения, производится аксиальное перемещение сопрягаемыхэбьектов, ошибка следящего привода 13 подаю.щего движения уменьшается, пороговый элемент11 возвращается в исходное состояние, и навыходе элемента И 2 вновь...
Устройство для контурного управления промышленным роботом

Номер патента: 1211691
Опубликовано: 15.02.1986
Авторы: Баранов, Жукова, Литвинцев, Пятницкий
МПК: G05B 19/00
Метки: контурного, промышленным, роботом
...номером замкнутой кнопки из набора клавиши переключателя 36,.Появление сигнала "0" на второмвходе элемента 29 устанавливает наее выходе сигнал "1", и сигналы отэлемента 28 не проходят на вход С 1счетчика 30. Счет прекращается исчетчик 30, дешифратор 35 остаютсяв состоянии на момент появления "0",на втором входе элемента 29. Такимобразом, замыкание клавишного переключателя 36 обеспечивает остановку счета после прохождения -го отрезка траектории, соответственнофиксируется состояние коммутаторов22 и 24 блока 1 (фиг. 2), и на выход Хкэтого блока поступает ко -ордината Х; конца 1"го отрезка.Аналогично на выходы У. и 2 .1 поступают координаты У, и Е,Появление сигнала "0" на второмвходе элемента 37 вызывает появлениесигнала "1" на его...
Устройство для установки перестраиваемого органа в заданное положение

Номер патента: 1211701
Опубликовано: 15.02.1986
Авторы: Зыков, Маслов, Мокшанцев
МПК: G05B 19/00, G05D 3/00
Метки: заданное, органа, перестраиваемого, положение, установки
...иьтх возмокнсстей устро;:тства,чеэт еже представлена функеиональная схема предлагаемого устройс)тва для установки перестраивае Огоргдна в зд)анног положение. гстРойст во содеР(ет РРДУктОР 1,тт Гс . го Эвмт ИЕрЕс )аиВсаЕЫЙ ОВГаЕ 1; г 0 "у гсщт(т,Х)Р 1 тИ гстаЕОЕ);ЕгГВтг - , с ИННЕ)Г 0" гр ",Гнид С. В ВЫ 61 а 1" НОЕ тНОКОНИЕ ЗНМКНЕТСЯ КОНЦЕВОЙ: ття(т.ЮЧт 311 Ь 4 - 1 ),ВОИЧНый Код НО МР 1)с 1 СИГНаЛа от КОНЦРВОГО ВЫКХ 1 ЮЧДТЕ ля запи)цетсе с помощью логического элемее.га 9- в регистр 8-2, т:,а Вьтходе схемы 10 сравнения появится )Иг)ал К = 8, я сигнал е( - Б исчезнет. Оптосимистор 6-2 погаснет и электродвигатель 3 остановится,"сх.л же выбрать положение выще ис;ходного, наприиер, положение 3, т; На выходе схемы сравнения появится сигнал АБ,...
Цифровое устройство для управления скоростью двигателя

Номер патента: 1218367
Опубликовано: 15.03.1986
Авторы: Голубев, Куклин, Микрюкова, Савин
МПК: G05B 19/00
Метки: двигателя, скоростью, цифровое
...управления и элементИ 10 вычислительного блока не пропускают импульсы на счетчики 2 и 11.1218367 50 55 В вычислительном блоке 3 вычисляется значение скорости вращения двигателя 23 по формуле Ч=К - " (1) 5и ф60Ггде К = --- величина постоянная. 2Фдля данного устройства, значение еехранится в блоке памяти 14;Г - частота следованияимпульсов с делителячастоты 21;2 - число импульсов, поступающее с импульсного датчика 6 скорос- .ти эа один оборот вала двигателя 23;ш - число импульсов, накопившееся в счетчике 2 (коэффициент пересчета);и - число импульсов, накопившееся в счетчике 11.В делителе 7 вычислительного блока 3 согласно формуле (1) происходит деление содержимого счетчика 2(ш) на содержимое счетчика 11 (и).Затем в умножителе 8...
Устройство для управления шлифовальным станком

Номер патента: 1223207
Опубликовано: 07.04.1986
Авторы: Ларшин, Соколов, Якимов
МПК: G05B 19/00
Метки: станком, шлифовальным
...при обработке резьбыходовых винтов работает следующим образом.При включении станка на рабочий ходсрабатывает кулачковый механизм поперечной подачи. В результате отрабатываетсяпоперечное перемещение (например, одинаковое на каждый проход круга) шлифовальной бабки, гарантирующее надежное касание круга с деталью в рабочей зоне. Прикасании круга с деталью в блок 5 сравнения по сигналу от генератора 16 импульсов с выхода датчика 2 мощности че223207 5 1 О 15 20 25 Формула изобретения 30 35 40 45 50 55 13рез блок преобразования спектра 3 поступают измеренные значения мощности шлифования. На второй и третий входы блока умножения поступают сигналы от датчика 10 длины дуги контакта и датчика 9 скорости детали, а на первый вход - сигнал,...
Многоканальное устройство для программного управления манипулятором

Номер патента: 1226408
Опубликовано: 23.04.1986
Авторы: Варгин, Михин, Пищугин, Рябушкин, Ткаченко
МПК: G05B 19/00
Метки: манипулятором, многоканальное, программного
...ЭКВИВАЛЕНТНОСТЬ 7 всех регулируемых координат, так как состояния45приводов 5 и их датчиков 6 положениясоответствуют выдаваемым регистром 2 командам на манипулятор.Наличие сигналов логической ."1"на входах элемента И 3 вызывает появ Оление такого же сигнала на его выходе, Логическая "1" с выхода элементаИ 3 поступает на вход счетчика 4 ион, воздействуя на блок 1, переключает программу на следующий кадр. Так Ыкак в новом кадре программы существуот команды, которые еще не отработаныманипулятором, то на входах соответствующих элементов ЭКВИВАЛЕНТНОСТЬпоявляются сигналы разных уровней и на их выходах имеются сигналы ло 1 игического 0 , которые запрещают логическим "0 с выхода элемента И 3 работу счетчика 4 импульсов, удерживая программу на...
Устройство для управления манипулятором

Номер патента: 1229728
Опубликовано: 07.05.1986
Авторы: Кондратенко, Тимченко, Ткаченко
МПК: G05B 19/00
Метки: манипулятором
...- сигналы 1;Соы; п - 1 (1=1, 2, , г).Поскольку многоканальный управляющий блок 4, предназначенный для формирования сигналов, соответствующих желаемому перемещению звеньев исполнительного органа, состоит из каналов, имеющих одинаковое функциональное построение, то его работу рассмотрим на примере к-го канала.На первый вход первого блока 29 умножения поступает сигнал 15 па п - 1 с соответствующего третьего выхода блока 3 вычисления текущих координат, а на второй вход - сигнал Я - Х.) с выхода первого сумматора 10. Выходной сигнал первого блока 29 умножения (Р - Х) Ьйпа х хп - 1 поступает на один из входов сумматора 12, на второй вход которого поступает сигнал (Ру - У.) 1 Сокаа в 1 с выхода второго блока 30 умножения, где он формируется...
Устройство для программного управления

Номер патента: 1229730
Опубликовано: 07.05.1986
Автор: Шикунов
МПК: G05B 19/00
Метки: программного
...наперед заданные блоком 7) обороты, пройти на этих оборотах участок движения с максимальной скоростью и на участке торможения с максимальцо допустимым ускорением уменьшить обороты до нулевых при выходе фрезы на заданные координаты (перерегулирование це допускается). С целью упрощения в предлагаемом устройстве разгон и торможение осуществляются с одинаковым ускорением, задавамым блоком 8 ограничения ускорения.10Рассмотрим работу устройства цри движении фрезы из одной точки позиционирования в другую. При нахождении фрезы вточке позиционирования сумма прямого кода на выходе блока 1 и дополнительного навыходе датчика 12 равна 0 и соответственно нулевые коды на выходах сумматора 2и преобразователя 3 код-код и нули на выходах элементов...
Устройство для управления транспортным роботом

Номер патента: 1247838
Опубликовано: 30.07.1986
Автор: Цветков
МПК: G05B 19/00
Метки: роботом, транспортным
...ошибке останова робота, поступающего с датчи ка 24 коррекции. Напряжение с датчика 24 коррекции в этом случае поступает на второй вход элементаИЛИ 4 и далее - на привод 5 с целью перемещения манипулятора для компенсации ошибки останова робота.При этом датчик 24 коррекции работает следующим образом.Ряд Фотоприемников 42, расположенных на манипуляторе вдоль борта робо та так, что центр манипулятора робота находится между двумя средними приемниками 42, принимает сигналы от узконаправленного излучателя, обозначающего цептр объекта обслужи- З 5 вания, При останове робота этот сигнал принимается одним из приемников 42, преобразуется в напряжение и поступает на один из ключей 40, который пропускает на выход напряжение, пос О тупающее на...
Устройство для управления сборочным роботом

Номер патента: 1247839
Опубликовано: 30.07.1986
МПК: G05B 19/00
...Эта взаимосвязь заложена в блок 2 модели сборочного процесса: величина реактивной силы прямо пропорциональна скорости движения соответствующей координаты Х ц. 11 алцчце блока 2 позволяет плавно, без лишних переключений и реверсов движения координат Х исовместцть оси собираемых деталей, т.епозволяет сократить вром 11 сборочного процесса. Таким образом, с моментаЕдейств 11 л силы Р, реактивные силы ЕХ и Е через исполнительные механизмыУ10 и датчики 9 моментов координат Х и 1 в виде сигналов через управляемые усилители соответственно 1 б и 17 подключаютсл к коммутаторам 13 и 14. К этому моменту сигнал с порогового элемента 15 переключает коммутаторы 13 ц 14 на связь сигналов реактивных сцл с управляющцмц входами сумматоров б...
Устройство для управления адаптивным роботом

Номер патента: 1252755
Опубликовано: 23.08.1986
Авторы: Каляев, Капустян, Носков, Усачев
МПК: G05B 19/00
Метки: адаптивным, роботом
...кратчайшего пути, выделения первого шага и отработки его блоком 5приводов возобновляется, но уже приусловии, что ключевые элементы 11,соответствующие положениям робота,в которых он соприкасается с даннойточкой препятствия, заблокированы ице участвуют в процессе моделированиякратчайшего пути.Если препятствие в рабочей зонеимеет большие размеры и сложную форму, то в процессе адаптации к даннойситуации в рабочей зоне робота происходит всего несколько касаний роботас каждым из препятствий, а если размеры препятствия достаточно малы, тодостаточно одного касания, после чего устройство управления управляетдвижением робота беэ соприкосновенийс препятствиями,С помощью блока 16 в блоке 1 набираются значения координат роботапо каждой степени...
Устройство для управления многозвенным манипулятором

Номер патента: 1257613
Опубликовано: 15.09.1986
Автор: Николенко
МПК: B25J 9/00, G05B 19/00
Метки: манипулятором, многозвенным
...3, находящегося на -м месте в кинематйческай цепочке звеньев 3, начиная ат звена 4, Таким образам, промежуточные звенья 3 поочередно по мере ввода в рабочую зону отрабатывают движения звена 4 и движутся по одной и той же траектории, пройденной звеном 4. Действительно, пусть в некоторой точке Л рабочей зоны необходиПри выходе к целевой точке манипулятор останавливается на необходимое время посредством перевода задатчика 12 в нейтральное положение, что приводит к остановке движения звена 2.30Для вывода из рабочей зоны манипулятора по той же траектории, по которой осуществляется ввод, оператор переводит эадатчик 12 в положение "Вывод". Задатчик 12 формирует отрицательный сигнал, который через клоч 13 поступает для записи на блок 7...
Устройство для управления источником сейсмических сигналов

Номер патента: 1095793
Опубликовано: 30.09.1986
Авторы: Асан-Джалалов, Давиденко, Пантелеев, Шагинян, Шпилевский
МПК: G01V 1/04, G05B 19/00
Метки: источником, сейсмических, сигналов
...разряда, задатчик 15 длительностизаполнения взрывной камеры, формирователь .сигнала подрыва 16, блок прерывания 17, блок запуска 18, счетчиквоздействий 19, генератор импульсов20, второй выход 21, панель управления 22, шестой выход 23, четвертыйвыход 24, пятый выход 25, третий 26 20выход, элемент И 27, третий усилительмощности 28, третий электромагнит29, одновибратор 30, КБ-триггер 31,задатчик выхлопа 32,выход 33, выход34 задатчика длительности заполнения 25.взрывной камеры, первый выход 35 блока запуска, второй и первый выходы36 и 37 одновибратора, первый, второй, третий выходы 38, 39 и 40 блокапрерывания, пятый и шестой 41 и 42выходы дешифратора, выход 43 формирователя сигнала подрыва, второй выход44 блока запуска, выход 45...
Устройство для управления манипулятором

Номер патента: 1262450
Опубликовано: 07.10.1986
Авторы: Алексеев, Грузинцев, Данилов, Добычин, Левин, Шмитман
МПК: G05B 19/00
Метки: манипулятором
...ключей 17 осуществляется срабатывание хода ползуна пресса. Один из информационных датчиков 18 блока 7 сигнализирует о положении ползуна пресса в верхней точке.При переводе устройства управления манипулятором в автоматический режим работы осуществляется пуск двигателя 54 и элемент 56, закрепленный на одном из звеньев цепи 35 и находящийся в момент пуска в зоне первого проходного датчика 9 блока 5, осуществляет при движении цепи 35 последовательное взаимодействие с каж - дым проходным датчиком 9. Причем необходимо отметить что срабатыванию каждого датчика 9 соответствует вполне опре 1262450деленное положение плеча и захватаманипулятора в пространстве,11 редположим, что первый проходнойдатчик 9 расположен таким образом,что соответствует...
Система управления укладкой в стопу эластичных листов

Номер патента: 1265698
Опубликовано: 23.10.1986
Автор: Кругляков
МПК: G05B 19/00
Метки: листов, стопу, укладкой, эластичных
...7 (фиг.1) устанавливается величина горизонтального перемещениярабочего органа, равная половине длины укладываемого листа, так как блок1 управления приводом горизонтального перемещения рабочего органа выполнен таким образом, что отработка заданной величины горизонтального перемещения начинается относительно середины горизонтального перемещения, Сприходом управляющего сигнала на горизонтальное перемещение в блок 1 начинается горизонтальное перемещениерабочего органа, а отработка заданного перемещения начинается только после прохождения середины. Это известное техническое решение, которое широко используется в станках с ЧПУ для,повышения точности отработки заданного перемещения. Задатчиками 5 и 11задают скорость укладки листов, Задатчиком...
Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины

Номер патента: 1274821
Опубликовано: 07.12.1986
Авторы: Капустник, Кокорев, Павлов, Суярко
МПК: B21D 43/00, G05B 19/00
Метки: длинномерного, зону, обрабатывающей, перемещения, рабочую, регулятор, цифровой
...выбрано большим, чем сопротивление резистора 27(п - 1). Это приводит к дальнейшему увеличению темпа замедления привода подачи в конце трегьего цикла.Форсировка темпа замедления производится до тех пор, пока на выходе нуль-органа 15 (в конце цикла) формируется логическая единица, вызывающая увеличение числа, содержащегося в дополнительном реверсивном счетчике 23, что приводит к увеличению общего сопротиг,леция резисторов в цепи отрицательной обратной связи усилителя 25.Если на выходе нуль-органа 15 по истечении а циклов формируется логический нуль, свидетельствующий о недопустимых тепловых потерях в двигателе, на выходе инвертора 17 формируется логическая единица, которая через элемент 2 И 19 поступает на вычитаюший вход...
Устройство для управления манипулятором

Номер патента: 1275372
Опубликовано: 07.12.1986
Авторы: Винокуров, Жарков, Загорский, Исаков
МПК: G05B 19/00
Метки: манипулятором
...компаратор 8, блок 9 выделения модуля, блок 10 выделения знака, коммутатор 11, де - шифратор 12, задатчик 13 сигналов, 15 ключ 14, инвертор 15 и ключи 16 и 17. 372Частота опроса задатчика 13 и частота выбора двигателей определяются задающим генератором 16. Частота следования импульсов генератора 6 выбирается из условия10где Й - частота генератора;п - число двигателей;Т - постоянная времени двигателя.Очередной импульс генератора 6, приходящий на входы счетчика 5 и генератора 7 пилообразного напряжения, запускает ГПН 7 и изменяет состояние счетчика 5. В соответствии с новым состоянием счетчика 5 изменяется напряжение на выходе ЦАП 4 и коммутатор 11 подключает следующее управляющее напряжение к входам блока 9 выделения модуля и блока...
Устройство для программирования промышленного робота

Номер патента: 1277068
Опубликовано: 15.12.1986
Авторы: Довбня, Лебедева, Морозов
МПК: B25J 9/00, G05B 19/00
Метки: программирования, промышленного, робота
...напряжение с датчиков 10 и 14 положения подается на информационные входы преобразователей 18 и 19. В результате преобразования напряжения в последних представлены значения кодов 11 и И , характеризующие положениегфпервой точки рабочей траектории. После этих предварительных операций оператор снова подает на вход сумматора 1 1 напряжение Пу и плавна перемещает каретку 3 вдоль оси х по направлению рабочей траектории, например слева направо. Такое перемещение осуществляется за счет подачи на вход сумматора 11 медленно и линейно изменяющегосянапряжение П.В процессе горизонтального перемещения каретки осуществляется автоматическое снятие существенных точек траектории с установкой каретки 3 на фиксированную высоту. Сущест венными точками...
Устройство для управления перемещением стола плоскошлифовального станка

Номер патента: 1278809
Опубликовано: 23.12.1986
Авторы: Жадан, Петренко, Примшиц, Самыков
МПК: G05B 19/00
Метки: перемещением, плоскошлифовального, станка, стола
...этого стол станка с закрепленной на нем деталью начинает двигаться от точки загрузки в сторону шлифовального круга (не показан) и к моменту подхода к последнему движется с установившейся скоростью, так как путь разгона стола до этой скорости всегда меньше пути от места загрузки детали до шлифовального круга, Датчик 9 среднего положения, который может быть выполнен в виде фотодатчика, закрепленного по оси шлифовального круга, или бесконтактного конечного выключателя и пластины, устанавливаемой по центру обрабатываемой детали, выдает сигнал после шлифования половины детали, т.е, после того, как пластина войдет в фотодатчик или бесконтактный конечный выключатель, Этот сигнал поступает на первый вход триггера 8 и перебрасывает последний...
Устройство для измерения динамических характеристик рабочего органа металлорежущего станка

Номер патента: 1302161
Опубликовано: 07.04.1987
Авторы: Бондарев, Бржозовский, Добряков, Игнатьев
МПК: G01M 15/00, G05B 19/00
Метки: динамических, металлорежущего, органа, рабочего, станка, характеристик
...для вьделения доплеровского сигнала н распределения импульсов по одному из двух каналов счета в зависимости от направления перемещения кареток суппорта станка 2.С выхода вычитателей последовательности импульсов распределяются по двум направлениям на вход измерителей 21 и 22 временных интервалов и входы реверсивных счетчиков 19 и 20, С выходов последних информация вьдается в двоичном коде на блок 26 цифровой ийдикации, где фиксируется интегральное значение перемещения суппорта станка в продольном (Х) и поперечном (2) направлениях за время измерения, и на входы блока 8 ЦАП,На входы измерителей 21 и 22 временных интервалов подаются как сиг13021 нальные импульсы, так и импульсы с тактового генератора 23. В измерителях 21 и 22 временных...
Следящий электропривод

Номер патента: 1310775
Опубликовано: 15.05.1987
Авторы: Алатырев, Величенко, Игошин, Лазарев, Скицкий
МПК: G05B 11/01, G05B 19/00
Метки: следящий, электропривод
...в люфте, исполнительный механизм 8 остается в неподвижном состоянии, При этом фаза напряжения роторной обмотки 9 перемещения изменяется пропорционально углу поворота 2вала электродвигателя 1. На эту величину изменяется фаза выходного сигнала датчика 10, поскольку обмотки ротора датчика 9 соединены с обмотками статора датчика 10. Если код величины перемещения равен нулю, то на выходе фазового дискриминатора 3 будет нарастать отрицательное напряжение. Когда напряжение фазового дискриминатора 3 будет равно эталонному напряжению источника 5, суммарный сигнал на вхоце усилителя 2 станет равным нулю и электродвигатель 1 остановится. Это соответствует перемещению вала электродвигателя 1 в положение, в котором люфт полностью выбран, Если...