Система программного управленияпромышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
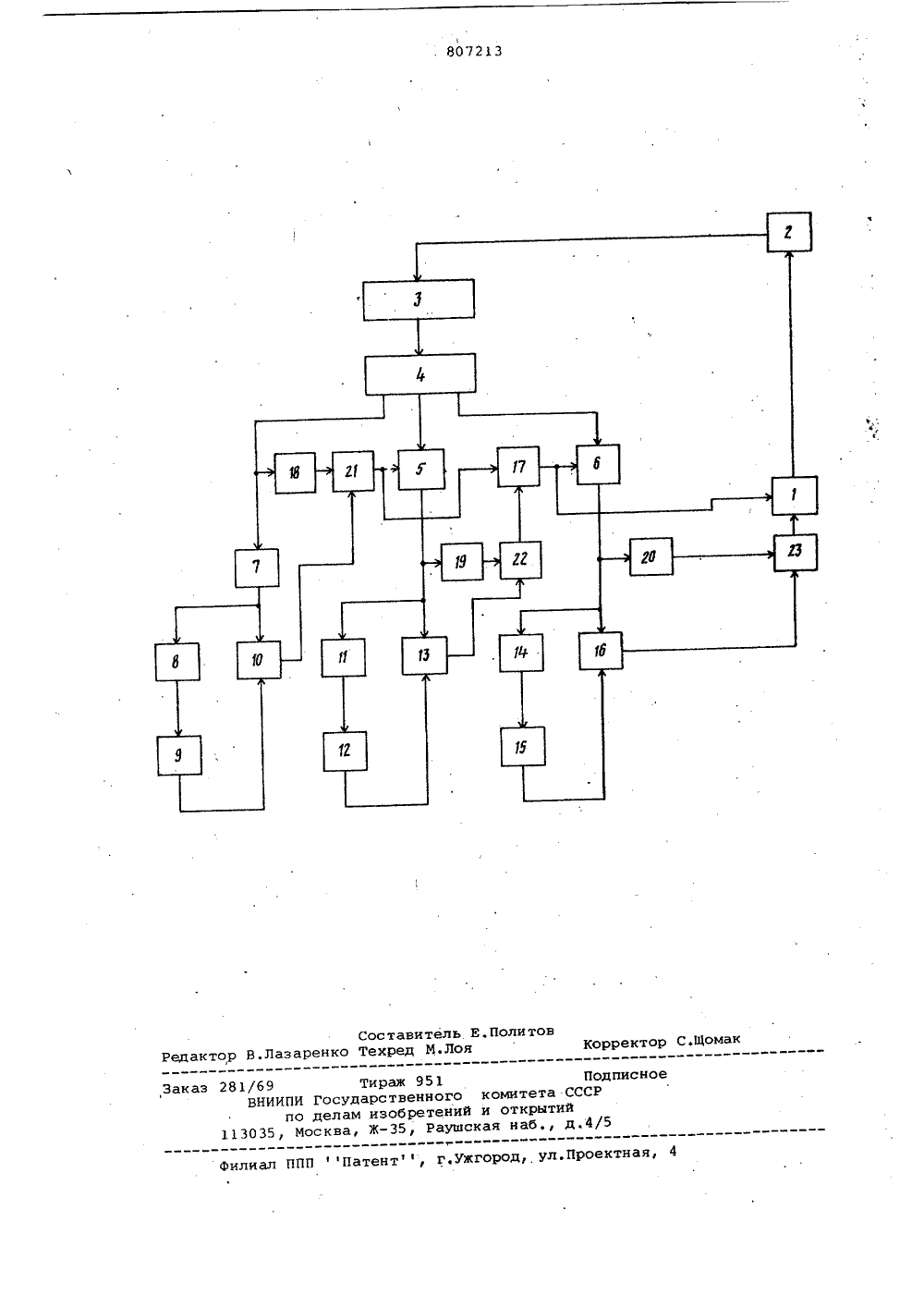
Сова Советских Социалистических РеспубликОП ИСАНИЕ ИЗОБРЕТЕНИЯ оо 807213 Х АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 050778 (21) 2641723/18-24с присоединением заявки йф(51)М. Кл.з 6 05 В 19/00 В 25 Т 8/00 Государственный коюнтет СССР но делаю изобретений н открытий(54) СИСТЕМА ПРОГРАМЬЯОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМИзобретение относится к робото-технике и может быть использовано при создании цикловых и позиционных систем программного управления промышленным роботом, 5Известна система программного управления промышленным роботом, содержащая блок управления, коммутатор программоноситель, приводы координат, блок команд манипулятора, блок тех нологических команд, датчики положения, датчики команд манипулятора и датчики технологических команд, Система обеспечивает параллельное считывание программы, записанной в 15 кадре Г 13 .Наиболее близкой к предлагаемой является система, содержащая после- довательно соединенные первый элемент И, коммутатор, программоноситель, блок считывания, привод, датчик по" ложения и компаратор, второй вход которого подключен к выходу преобразователя, последовательно соединенные блок команд манипулятора, 25 датчик команд манипулятора и второй элемент И, последбвательно соединенные блок технологических команд, датчик технопогических команд и третий элемент И 2, 30 Недостатком этой системы являют-.ся малые воэможности робота из-зазначительных размеров программоносителя, который является одним изсущественных узлов системы, Параллельная отработка информации, записанной в кадре, не позволяет программировать в одном кадре програм-.мы перемещение по каждой координате,команды на манипулятор и команды наобслуживаемое оборудование, которыев большинстве случаев должны выполняться последовательно,Целью изобретения является расширение области применения системы.Поставленная цель достигаетсятем, что система содержит последовательно соединенные первый элементНЕ, первый элемент ИЛИ, первый ключ,второй элемент НЕ, второй элементИЛИ, четвертый элемент И, второйключ, третий элемент НЕ и третийэлемент ИЛИ, второй вход которогоподключен к выходу третьего элементаИ, а выход - к первому входу первого элемента И, второй вход которого соединен с выходом четвертогоэлемента И, второй вход которогоподключен к выходу первого элементаИЛИ, второй вход первого ключа соединен со вторым выходом блока считывания, а выход - со входом блокакоманд манипулятора и вторым входомвторого элемента И, выход которогоподключен ко второму входу второгоэлемента ИЛИ, выход компаратора соединен со вторым входом первого элемента ИЛИ, второй вход второго ключаподключен к третьему выходу блокасчитывания, а выход - ко входу блокатехнологических команд и второмувходу третьего элемента И, выход которого соединен со вторым входом третьего элемента ИЛИ,На чертеже представлена функциональная схема системы,Система содержит первый элемент15И 1 коммутатор 2, программоноситель3, блок 4 считывания, первый ключ 5,второй ключ 6, преобразователь 7,привод 8, датчик 9 положения, компаратор 10, блок 11 команд манипулято Ора, датчик 12 командманипулятора,второй, элемент И 13, бЛок 14 технологических команд, датчик 15 технологических команд, третий элементИ 16, четвертый элемент И 17, первыйэлемент НЕ 18, второй элемент НЕ 19,третий элемент НЕ 20, первый элементИЛИ 21, второй элемент ИЛИ 22, третийэлемент ИЛИ 23.Система работает следующим образом.Считывание кадра и программ,.набранного на программоносителе 3,происходит после его установки коммутатором 2 по сигналу с выхода первогоэлемента И 1.Исполнение считанного кадра проис- З 5ходит последовательно, Сначала отрабатываются перемещения по координатам, затем команды манипулятора и далее технологические команды.Цля этого на выходе блока 4 считывания включены первый и второй ключи 5 и 6,Выход первого ключа 5 блокируется до момента появления разрешающего уровняна выходе компаратора 10, Разрешающий сигнал поступает с выхода компаратора 10 при совпадении уровня сигнала, поступающего с выхода преобразовател; 7 с уровнем сигнала, поступающего с датчиков положения 9. Поэтому выполнение команд на манипулятор возможно лишь после окончанияпроцесса позиционирования координатманипулятора.Сигнал о выполнении команд манипулятора поступает со второго элемента И 13 на вход четвертого элементаИ 17 при наличии сигнала с датчикакоманд манипулятора 12 и разрешаетобработку технологических команд.Посигналу с выхода третьего элемента И16, поступающему на вход первого эле- Ямента И 1, в момент прихода сигналас датчика 15 технологических команд.первый элемент И 1 формирует сигнал,поступающий на коммутатор 2. При отсутствии в считанном кадре информа-. у 5 1ции на позиционирование или исполнение команд, разрешающие сигналы поступают на входы соотнетствующих ключей5 и 6 и первого элемента И 1, на вхо 1первого ключа 5 непосредственно свыходаблока 4 считынания через первый элемент НЕ 18, на вход второгоключа 6 через второй. элемент НЕ 19и четвертый элемент И 17 с выхода первого ключа 5, а на вход первого элеФмента И 1 с выхода нторогО ключа 6через третий элемент НЕ 20,Предлагаемое изобретение поз волит расширить область применения робота путем программирования последовательных переходон в одном кадрепрограммы.Формула изобретенияСистема программного управленияпромышленным роботом, содержащая последовательно соединенные первый элемент И, коммутатор, программоноситель, блок считывания, преобразова.тель, привод, датчик положения и компаратор, второй вход которого подключен к выходу преобразователя, последовательно соединенные блок командманипулятора, датчик команд манипулятора и второй элемент И, последовательно соединенные блок технологических команд, датчик технологических команд и третий элемент И,о т л и ч а ю щ а я с я тем, что,с целью расширения области применения, она содержит последовательно соединенные первый элементНЕ, первый элемент ИЛИ, первый ключ,второй элемент НЕ, второй элементИЛИ, четвертый элемент И, второйключ, третий элемент НЕ и третийэлемент ИЛИ, второй вход которогоподключен к выходу третьего элементаИ, а выход - к первому входу первогоэлемента И, второй вход которого соединен с выходом четвертого элементаИ, второй нход которого подключен квыходу первого элемента ИЛИ, второйвход первого ключа соединен со вторым выходом блока считывания, а выход - со входомблока команд манипулятора и вторым входом второго элемента И, выход которого подключенко второму входу второго элементаИЛИ, выход компаратора соединен со.вторым входом первого элемента ИЛИ,второй вход второго ключа подключенк третьему выходу блока считывания,а выход - ко входу блока технологических команд и входу третьего элемента И, выход которого соединенсо вторым входом третьего элемента ИЛИ.Источники информации,принятые во внимание при экспертизе1. Белянин П.Н. Промышленные роботы. М., Машиностроение, 1975,с.106-107.2. Инструкция по эксплуатацииХпз 1 гцсг 1 опв Мапца 1 йооЕз Маг 1-1 А,1976 (прототип).80 7213 ираж 951 Порственного комитета СССРизобретений и открытийЖ, Раушская наб.,з 28)/69 ВНИИПИ Госуд по делам 113035, Москва, сное д. 4/5 ППП Патент, г,ужгород, ул.Проектна Составитель Е,Политов Редактор В.Лазаренко Техред М.Лоя Корректор С,Щомак
СмотретьЗаявка
2641723, 05.07.1978
ПРЕДПРИЯТИЕ ПЯ Р-6930
КНАУЭР ИГОРЬ БОРИСОВИЧ, ШОР ВИКТОР ВАЛЕНТИНОВИЧ, СКРИПКА ЮРИЙ ВАСИЛЬЕВИЧ, АГАПОВ АНАТОЛИЙ НИКИФОРОВИЧ, ЗВЕРЕВ МИХАИЛ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: программного, роботом, управленияпромышленным
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/3-807213-sistema-programmnogo-upravleniyapromyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управленияпромышленным роботом</a>
Устройство для контроля входа и выхода рабочих и служащих

Номер патента: 615514
Опубликовано: 15.07.1978
Авторы: Козинцев, Морозов, Покидаев, Шаровар
МПК: G07C 1/10
Метки: входа, выхода, рабочих, служащих
...открывается сигналом, вырабатываемым формирователем 13 опроса регистра анализа, Появившийся сигнал на ее выходе проходит через элемент ИЛИ 25 на формирователе 8 выходной информации, который под действием этого сигнала вырабатывает ответную информацию, разрешающую вход на объект по шйне 12, й сигйал 5 10 15 20 25 30 35 40 45 50 55 60 65 на элемент И 40. Элемент И 40, подготовленный по другому входу блоком 1 приема команд, срабатывает и появившийся сигнал на его выходе поступает через элемент ИЛИ 42 на элементы И 30, 31 блока 10 корректива и через элемент ИЛИ 6 на блок памяти 9 и второй формирователь 18 сигналов управления блоком памяти, В результате избирательная схема 31 выбранного дешифратора 4 информативного узла 27 срабатывает...
Феррит-диодный универсальный логический элемент на два входа

Номер патента: 185582
Опубликовано: 01.01.1966
Автор: Дмитракова
МПК: H03K 19/16
Метки: входа, два, логический, универсальный, феррит-диодный, элемент
...нижнего сердечника пары в состояние +Вг, а верхнего - в состояние - Вг.15 Аналогично производится запись О и 1на вход 11. При последующем считывании информации током канала два из четырех сердечников элемента, находящиеся в состоянии20 намагниченности +Вг, будут перемагннчиваться и напряжением, наводимым на выходных обмотках, запирать подключенные к нимдиоды,В отличие от существующих логических модулей в универсальном элементе на каждый ферритовый сердечник намотано вместо одной подве выходных обмотки, при этом каждая выходная обмотка пары сердечников, относящихся ко входу 1, последовательно связана с одЗО пой пз выходных обмоток пары сердечников,185582 1 относящихся ко входу П, как показано на схеме элемента.Объединенные попарно...
Устройство для регистрации входа и выхода

Номер патента: 773660
Опубликовано: 23.10.1980
Авторы: Варламов, Дубинин, Подкопаев, Прозоров, Романов, Солдатин
МПК: G07C 9/00
Метки: входа, выхода, регистрации
...блоком 9 контроля на нечет и контрольную сумму, который в свою очередь соединен с блоком 10 памяти емкостью 4 кбайта. Блок 10 памяти соединен с блоком 11 согласования с вычислительной машиной, через который осуществляется передача массива информации на внешнее устройство выводов вычислительной машины. Блок 8 селекции, блок 9 контроля, блок 10 памяти и блок 1 1 согласования с вычислительной машиной подключен к блоку 12 управления, предназначенному для управления всеми операциями передачи информации и выполненному в виде управляемого коммутатора.Между блоками 12 управления и блоком 8 селекции включен блок 13 регистрации времени, предназначенный для подачи кода текущего времени и включения и выключения всего устройства по заранее заданной...
Элемент с управляемой проводимостью

Номер патента: 855671
Опубликовано: 15.08.1981
Авторы: Герасимов, Никищенков, Родионов, Сальников
МПК: G06G 7/12
Метки: проводимостью, управляемой, элемент
...частоты Г, На выходе многоустойчивого элемента 10, подключенного к первому входу триггера 9, появляются импульсы с частотой Г = Гlп (где и - коэффициент деления многоустойчивого элемента), совпадающие по времени с одним из импульсов последовательности Г,Сдвиг по фазе последовательностиотносительно опорной последовательности Го, формируемой на выходе многоустойчивого элемента )1, подключенного ко 10 15 20 25 35 45 второму входу триггера 9, определяет число й, записанное в элементе 10 по входу 13. Запись нового значения этого числа в элемент 10 производится в момент времени, сдвинутый относительно моментов появления импульсов Го на количество квантов 1/Г, равное записываемому числу. В результате того, что последовательности Г и Г...
Мажоритарный логический элемент

Номер патента: 1257836
Опубликовано: 15.09.1986
Авторы: Бестемьянов, Вековищев, Казимов, Лисенков, Матвеев, Разинова, Шалягин
МПК: H03K 19/23, H05K 10/00
Метки: логический, мажоритарный, элемент
...входе. При любом другом входном наборе на первом и втором информационных входах на выходе элемента И 32 появляеттся сигнал логического нуля, который запирает через элементы ИЛИ 34 и 35 элемент И 32, и для включения второго блока 17 сравнения необходима подача запускающего импульса на установочный вход. Для зашиты от ложных срабатываний блока сравнения в него введена цепочка из четного количества инверторов 33, обеспечивающая необходимую задержку сигнала.При наличии сигналов логической единицы на выходе первых блоков 16 сравнения через четвертый элемент 15 ИЛИ на первых и вторых информационных входах вторых блоков 1 сравнения появляются также сигналы логической единицы. Одновременно открывается второй элемент И 7, за пускающий...
Предыдущий патент: Цикловая система программногоуправления промышленным роботом
Следующий патент: Способ программирования движенийпромышленного робота
Случайный патент: Устройство для очистки запыленных газов