Устройство для записи программыуправления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
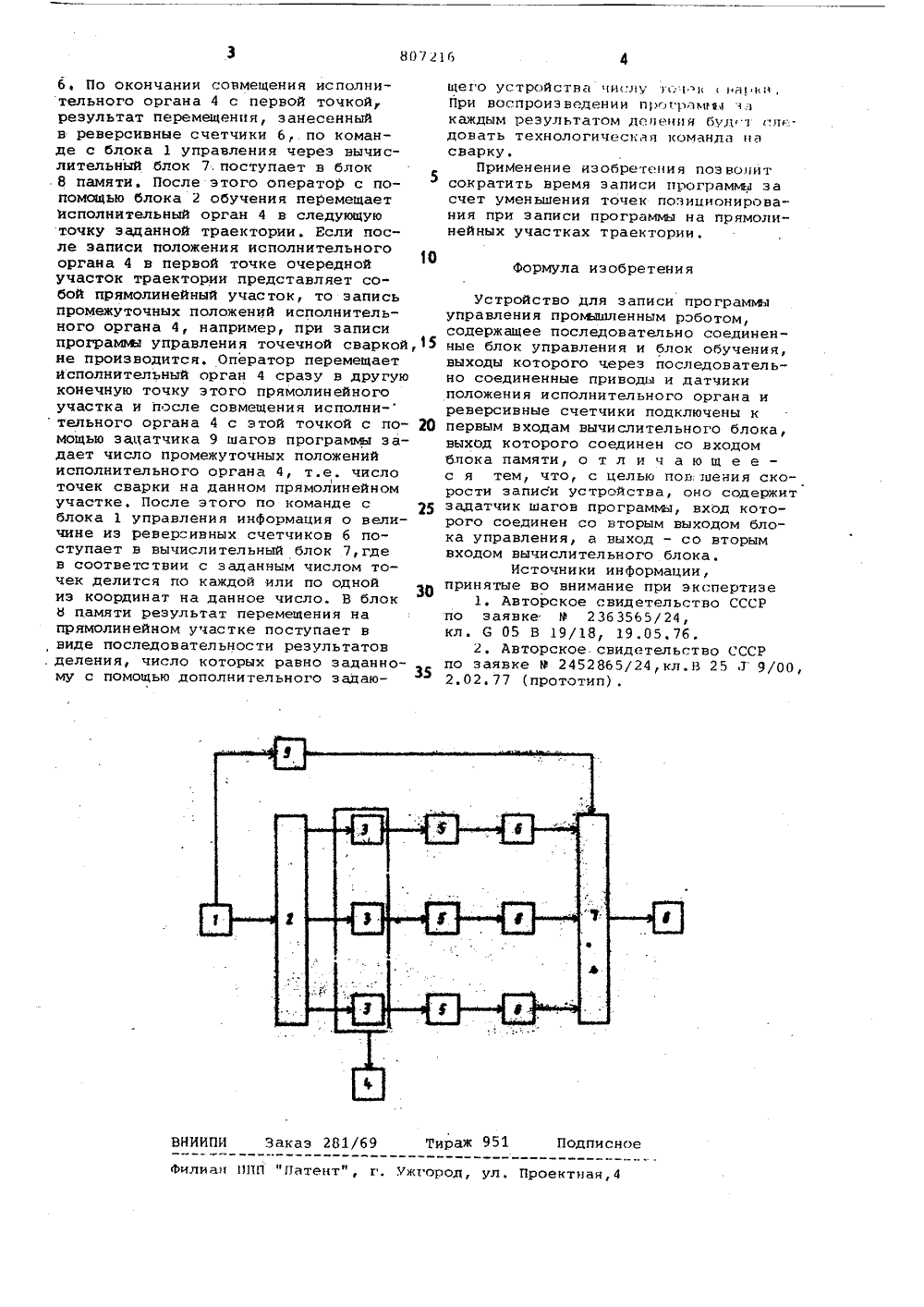
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советскик Социадистичесиих Ресдубдик(22) Заявлено 240778 (21) 2654051/18-24с присоединением заявки йо(51)М. Кл.з 6 05 В 19/00 В 25 У 9/00 Государственный комитет СССР по делам изобретений и открытий(72) Авторы изобретения Г.И.Сергацкий и Г,А,Лин Институт автоматики им.ХХУи Институт электросварки им Заявите ОИСТВ ПРАЧЛ ЛЯ ЗАПИСИ ПРОГРАММЬЯ ПРОМЫШЛЕННЫМОБОТОМ 4) а ремещения испоЛнительного органа нуказанных участках.Целью изобретения является повышение,скорости записи устройства.5 По.тавленная цель достигаетсятем, что устройство содержит эадатчик шагов программы, вход которогосоединен со вторым выходом блока управления, а выход - со вторым входом 10 вычислительного блока.На чертеже иэображена функциональная схема устройства,Устройство содержит блок 1 управления, блок 2 обучения, приводы 3 15 исполнительного органа, исполнительный орган 4, датчики 5 положенияисполнительного органа, реверсивныесчетчики 6, вычислительный блок 7блок В памяти, .задатчик 9 шагов проя к роботопользовано равления апример дл о для записипромышленнымлок памяти,датчики,приорост 20 Устройство для записи про работает следующим образом.Оператор с помощью сигнал ка 2 обучения воздействует н воды 3 исполнительного орган ремещает последний в первую заданной траектории, Результ мещения измеряется датчиками жения, сигналы которых занос соответствующие реверсивные Изобретение относитстехнике и может быть исдля записипрограммы уппромышленным роботом, нточечной сварки.Известно устройствпрограммы управленияроботом, содержащее бисполнительный орган,воды и сумматоры 1,Однако оно имеет низзаписи,Наиболее близким по технической сущности к предлагаемому является устройство для записи программы уп равления промышленным роботом, содержащее последовательно соединенные блок управления и блок обуч ния, выходы которого через последовательно соединенные приводы и датчики положения исполнительного органа и реверсивные счетчики подключены к первым входам вычислител ного блока, выход которого соединен со входом блока памяти 12.Недостатком известного устройст является большое время записи программы для прямолинейных участков траектории в случае позиционного и рамкив бло- прии пеочку т пере полотся в четчики8072)Ь Формула изобретения Заказ 281/69 Тираж 951 Подписное ВНИИПИ Филиал 1 П 1 П "Патент", г, Ужгород, ул. Проектная,4 Ь, По окончании совмещения исполнительного органа 4 с первой точкой результат перемещения, занесенный в реверсивные счетчики Ь, по команде с блока 1 управления через вычислительный блок 7.поступает в блок 8 памяти. После этого оператор с по- помощью блока 2 обучения перемещает Исполнительный орган 4 в следующую точку заданной траектории. Если после записи положения исполнительного органа 4 в первой точке очередной участок траектории представляет собой прямолинейный участок, то запись промежуточных положений исполнительного органа 4, например, при записи програмьв управления точечной сваркой,5 не производится. Оператор перемещает исполнительный орган 4 сразу в другую конечную точку этого прямолинейного участка и после совмещения исполни-тельного органа 4 с этой точкой с по- Щ мощью зацатчика 9 шагов программы задает число промежуточных положений исполнительного органа 4, т.е. число точек сварки на данном прямолинейном участке, После этого по команде с 25 блока 1 управления информация о величине иэ ревер"ивных счетчиков 6 поступает в вычислительный блок 7,где в соответствии с заданным числом точек делится по каждой или по одной из координат на данное число. В блок 8 памяти результат перемещения на прямолинейном участке поступает в , виде последовательности результатов , деления, число которых равно заданному с помощью дополнительного задающего устройств ни.лу ык а кд,При воспроиэ ведении прггрммызкаждым результатом деяения буд . .л:довать технологическая команда насварку,Применение изобретения позвонитсократить время записи программы засчет уменьшения точек позиционирования при записи программы на прямолинейных участках траектории. Устройство для записи программыуправления проьыдленным роботом,содержащее последовательно соединенные блок управления и блок обучения,выходы которого через последовательно соединенные приводы и датчикиположения исполнительного органа иреверсивные счетчики подключены кпервым входам вычислительного блока,выход которого соединен со входомблока памяти, о т л и ч а ю щ е ес я тем, что, с целью пою.шения скорости записи устройства, оно содержитзадатчик шагов программы, вход которого соединен со вторым выходом блока управления, а выход - со вторымвходом вычислительного блока,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРпо заявке М 23635 Ь 5/24,кл.05 В 19/18 19,05.76.2. Авторское. свидетельство СССРпо заявке Р 24528 Ь 5/24,кл.н 25 Х 9/00,2,02,77 (прототип),
СмотретьЗаявка
2654051, 24.07.1978
ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДАКПСС, ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. E. O. ПАТОНА
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/2-807216-ustrojjstvo-dlya-zapisi-programmyupravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программыуправления промышленным роботом</a>
Способ калибровки блока записи для фотомеханической репродукции

Номер патента: 1132801
Опубликовано: 30.12.1984
Автор: Винрих
МПК: G03F 3/08
Метки: блока, записи, калибровки, репродукции, фотомеханической
...должны определяться не все данные коррекции, можно применять запоминающее устройство корректирующих величин незначительной емкости. Кроме того, емкости;запоминающих устройств как измеренных значений, так и корректирующих уменьшаются.На фиг.1 дана линеаризирующая схема, на фиг.2 - то же, пример ис-, 403полнения; на фиг,3 - пример исполнения интерполяционной схемы, на фиг. 4 - пример исполнения линеариэирующей схемы; на фиг.5 - пример исполнения другой интерполяционной схемы, на Фиг.б - другой пример исполнения линеаризирующей схемы.На фиг.1 показан пример исполнения устройства для получения и накопления данных коррекции для линеаризации, в котором данные коррекции перед регистрацией перезаписываются в расположенном в тракте...
Блок записи временных сигналов для запоминающих устройств

Номер патента: 640684
Опубликовано: 30.12.1978
Авторы: Андраш, Габор, Иштван, Карой, Петер
МПК: G11C 7/00
Метки: блок, временных, записи, запоминающих, сигналов, устройств
...дикатор, преобразователь кодов, блок временного запуска, модулируемый генератор, счетчик один из входов которого подключен к шине минутных сигналов, и шину часовых сигналов 21Недостатками известного блока являются малая точность и невысокая надежность.Целью изобретения является повышение точности и надежности блока. записи.Для достижения поставленной цели выход блока временного запуска соединен с другим входом счетчика,640684 Формула изобретения Подпи ираж 6 ЦНИИПИЗаказ 7013/5 илиал ППП фПатентф, г, Ужгород, ул. Проектна один из выходов которого через индикатор соединен с шиной часовых сигналов, а другой выход счетчика соединен с преобразователем кодов, подключенным к модулируемому генератору, связанному с выходом блока.Изобретение...
Поворотный блок тягового органа устройства для транспортирования сыпучих материалов

Номер патента: 1191380
Опубликовано: 15.11.1985
Автор: Потапов
МПК: B65G 19/14
Метки: блок, органа, поворотный, сыпучих, транспортирования, тягового, устройства
...быть использовано в угловых поворотных устройствах конвейеров с бесконечным тяговым органом.Цель изобретения - снижение металлоемкости и повышение надежности работы устройства.На фиг. 1 изображен предлагаемый поворотный блок; общий вид; на фиг, 2 - то же, вид сверху; на фиг. 3 - участок втулочно-роликовой цепи опорного элемента.Поворотный блок тягового органа устройства для транспортирования сыпучих материалов включает кожух 1, содержащий верхнюю крышку 2, нижнюю крышку 3 и боковую стенку 4 с входным и выходным патрубками 5, Верхняя и нижняя крышки 2 и 3 кожуха 1 выполнены с центральными отверстиями 6, со стороны которых между крышками установлена обечайка 7. В кожухе установлен опорный элемент 8 для тягового органа 9 устройства....
Блок записи для запоминающего устройства с последовательным вводом-выводом информации

Номер патента: 473211
Опубликовано: 05.06.1975
МПК: G11C 7/10
Метки: блок, вводом-выводом, записи, запоминающего, информации, последовательным, устройства
...ропзводится запись 1 или считывание) ицфорацпп послелователио с первого, второго и ",. л разрядов выбранного алреса.В известно олокс записи используятся и ГОКО 2 11 Х КЛ 101 С Й И ОДИ П. ООЩИ Й Л,1 51 ВСС.П разрядов, разрялцый форчироватсль записи. Однако акой о,Ок записи Оо,ас", 105(01 быть примснсц только лля ЗУ с цсразрушдющич считыванием информации.Целью изобрстсция является расщирецпе области причснения блока записи лля ЗУ с последовательпыч вводом-выводом пнфорации.Поставленная цель лостигается тсч, что в устройство ввслсп), и логических схем по числу токовых клочей, каокдая из которых состоит из двух схезя И, выходы которы.; подключены ко вхолач схемы ИЛИ; выход каждой схсчы И 1 И подключсц ко входу сЮВСС ВуЮШСГО;с;ОВОЛП(ГО...
Устройство для управления регенерацией динамической памяти со свободными зонами

Номер патента: 1462425
Опубликовано: 28.02.1989
Авторы: Боженко, Гордиенко, Кондратов, Мешков
МПК: G11C 21/00
Метки: динамической, зонами, памяти, регенерацией, свободными
...границ эон(Фиг, 32,о), которые на входе 12,сопровождаются сигналом управления навходе 4,Нижние границы эон определяютсяпо трем старшим разрядам строчногоадреса регенерации при нулевом состоянии его четырех младших разрядов,Триггер 9 в режиме внешних обращенийустановлен в нулевое состояние (фиг,ЗВ), счетчик 2 адресов регенерациивыдает сигнал переноса (фиг, ЗО)После записи адресов границ зонустройство переводится в режим регенерации сигналов с входа 10 (Фиг, Зф,по которому триггер 9 устанавливается в единичное состояние (Фиг, Зе),Блок синхронизации начинает выдаватьимпульсы регенерации со своего выхода3.6 (фиг. Зж), По сигналу переноса(фиг, 4 у - выдается сигнал подтверждения. Он через элемент И 15 устанавливает счетчик 17 в нулевое...
Предыдущий патент: Устройство для программногоуправления многокоординатнымманипулятором
Следующий патент: Устройство для записи программыуправления промышленным роботом
Случайный патент: Пресс