Устройство для программного управления автооператором гальванической линии
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 511567
Автор: Гренадер
Текст
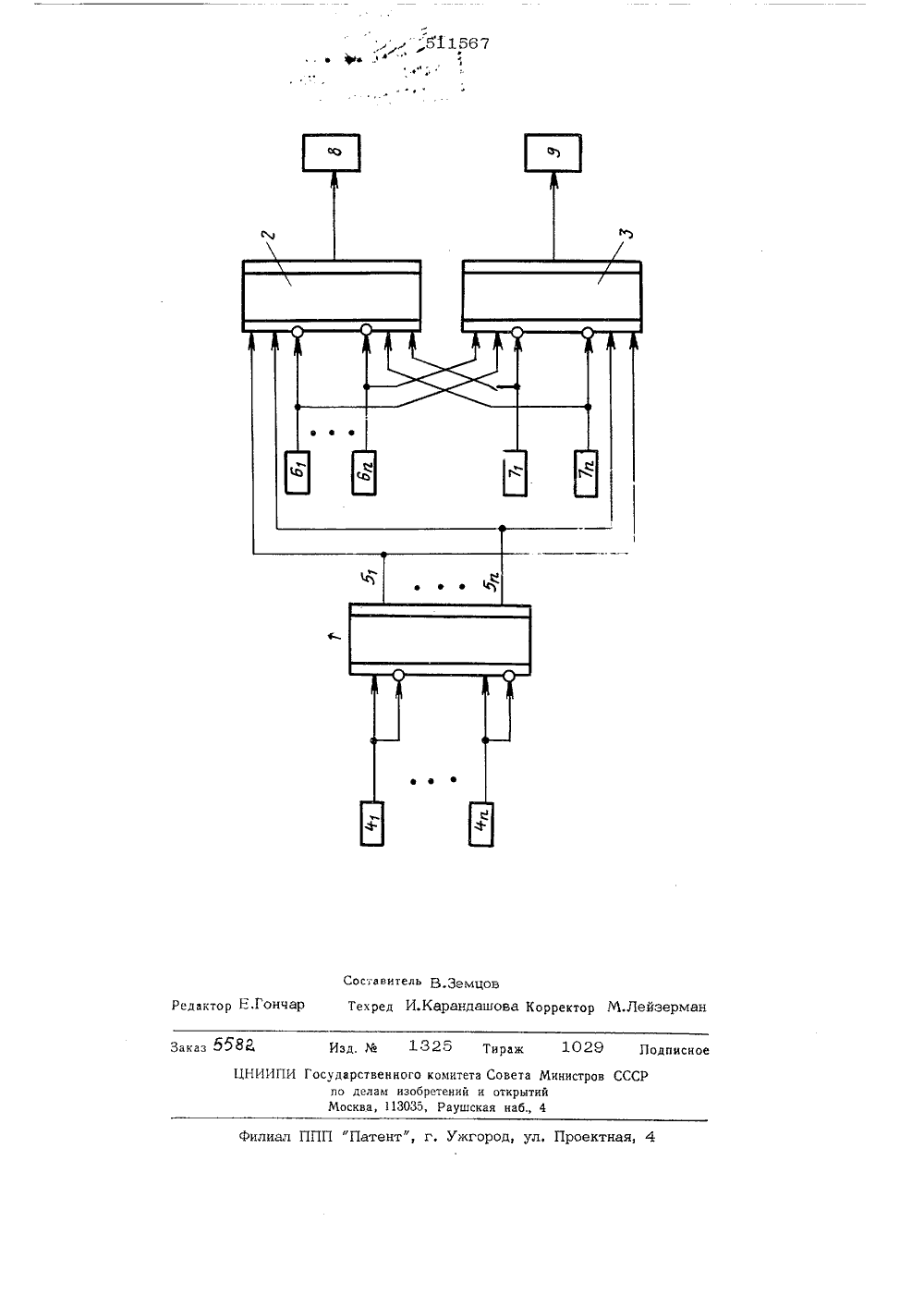
О П Союз Советских Социалистических Республик,11,73 (21) 1972970/24 С 05 В 19/00 ением заявки-Государственный комитеСовета Министров СССРпо делам изобретенийи открытий 3) Приорите 53 УДЫ 62-52 (; а.;,ень 15 вано 25.04.76,Бюлле(54) УСТРОЙСТ 1 Я ПРОГРАММНОГО УПРАВЛ 1;Н 11 Я АВТООПЕРАТОРОъАЛЬВАНИЧЕСКОЙ ЛИНИИ ж ения н онтальныл тчикп . да дключены ора гори; . сИзобретение относится к позиционнымустройствам автоматического управленияциклически работающими транспортныди срествами, в частности, автооператорами гальванических линий,Известны устройства для программногоуправления автооператором гальваническихлиний, содержащие датчики загрузки рабочих позиций линии, датчики горизонтального и вертикального положения автооператора, исполнительные механизмы вертикального и горизонтального перемещения и дешифра торы пр ограммы вертика льных и горизонтальных перемещений,Однако в этих устройствах, во-первых,отсутствует связь между фактической загрузкой отдельных рабочих позиций и адресным кодом, выдаваемым дешифраторомпрограммы, что вызывает опасность аварийного опускания транспортируемой кассеты на занятую рабочую позицию при случайном сбое программы; во-вторых, требуется установка программирующего устройства в исходное положение в начале цикла,что увеличивает число холостых тактов раооты и сложность схеды; в-третьих,импульсный характер ко., анд рассогласования между кодом адреса и действительным положением автооператора (сравнениеа производится только в момент нахо давтооператора над какой-либо ванной) вызывает необходимость элемента запоминания команд в промежутках между ваннадли, что увеличивает возможность сбоя10 в работе,Цель изобретя.шя - повышение падежости работы устройства и его упрощение,Достигается это благодаря тому, чтопрямые и инверсные входы дец пфратора1 программы подключены к дагчпкадт загрузки рабочих позиций, выходы - к прямым входам дешпфраторов горизи вертикальных перемещенложения автооператора по1120 версным входад; дешифрат.ьных перемещений и прямым входад -с лк 1- ратора вертикальных перемен ений,чики вертикального положения авт лсратора подключены к пряд 1 ым входад ешиф 25 ратора горизонтальных геремеще:;ий10 15 Устройство работает следующим образом,Исходному положению автооператора перед любой очередной транспортной операцией соответствует определенное расположение загруженных и свободных рабочих позиций в линии, Поэтому на входах дешифратора 1 всегда будет сочетание сигналов от датчиков 4 загруженных ра 60 инверсным входам дешифратора вертикальных перемещений; выходы дешифраторовгоризонтальных и вертикальных перемещений подключены к входам соответствующих исполнительных механизмов,В основу построения схемы дешифратора программы заложено условие обеспечения минимальных простоев автооператора, в соответствии с которым каждаяочередная транспортная операция выполняется с другой кассетой, Таким образом,каждой транспортной операции соответствует определенное сочетание загруженныхрабочих позиций (сигналы от них подаютсяна прямые входы дешифратора) и одной изсвободных рабочих позиций, являющейсяадресом данной операции (сигнал об этомпоступает через инверсный вход дешифратора).Б пределах каждой операции последовательность отдельных движений (вперед -назад, вверх - вниз) однозначно определяется одним из двух датчиков вертикального положения автооператора (для горизонтальных перемещений) и датчиком горизонтального положения автооператоранад определенной рабочей позицией (длявертикальных перемещений),На чертеже дана блок-схема предлагае-.мого устройства для обслуживания й рабочих позиций,Устройство состоит из дешифратора 1программы, связанного своими выходами сдешифратором 2 горизонтальных перемещений и дешифратором 3 вертикальныхперемещений, Прямые и инверсные входыдешифратора 1 соединены с датчиками 4загрузки рабочих позиций. Выходы 5 дешифратора .". соединены с прямыми входамидешифраторов 2 и 3, Датчики 6 положежения автооператора над рабочими позициями соединены с инверсными входамидешифратора 2 горизонтальных перемещений и с прямыми входами дешифратора 3вертикальных перемещений, Датчики 7вертикального положения автооператорасоединены, наоборот, с прямыми входамидешифратора 2 и инверсными входами дешифратора 3. бочин позиций соответствующее очередной транспортной операции,Допустим, эта операция заключаетсяв переносе кассеты с первой рабочей позиции на вторую рабочую позицию, а предыдущая закончилась загрузкой Л-ойрабочей позиции, Тогда наличие сигнала,поступающего от датчика 4, на прямомвходе дешифратора 1 и отсутствие сигнала от датчика 42 на инверсном входе дешифратора 1 образует код, обеспечивающийпоявление сигнала на выходе 5 дешифратора 1. Этот сигнал, поступая на вход дешифратора 2, дополняет собой код, образованный наличием на другом прямом его входесигнала от датчика 72 (характеризующегонижнее положение каретки автооператора)и отсутствием на его инверсном входе сигнала от датчика 6. На выходе дешифратора 2 появляется сигнал, соответствующий команде на перемещение, которой передается на блок управления 8, Происходит холостой ход авто- оператора к первой рабочей позиции, После появления сигнала от датчика 6 на входе дешифратора 2 исчезает кодовое сочетание, характерное для данного перемещения и автооператор останавливается.Одновременно на входе дешифратора 3вертикальных перемещений образуется кодовое сочетание с имеющимся сигналом отдешифратора 1, при котором на одном выходе дешифратора 3 появляется сигнал, соотьетствующий команде на перемещениекаретки вверх, который передается наблок управления 9, Производится подъемкассеты, После достижения верхнего положения появляется сигнал от датчика 71,который, поступая на инверсный вход дешифратора 3, нарушает имеющееся совпадение и каретка автооператора останавливается, Одновременно на входе дешифратора 2 вновь появится кодовое сочетание,но уже соответствующее появлению на еговыходе команды на перемещение назаддля перемещения кассеты ко второй рабочей позиции.После появления сигнала от датчика62 исчезает команда с выхода дешифратора 2 и появляется команда на выходе дешифратора 3, соответствующем перемещению вниз,После посадки вниз кассеты на рабочуюпозицию появляется сигнал от датчика 42,который, поступая на инверсный вход дешифратора 1, снимает с выхода 5 сигнало выполненной операции и, поступая напрямой вход дешифратора 1, создает код, 511567вызываюший появление на выходе 52 ситнала на очередную операцию,Команда на перемещение вниз с выхода дешифратора 3 исчезает с небольшойвыдержкой времени обеспечивающей рассоединение кассеты с автооператором,Движение автооператора вниз прекращается при поступлении на инверсный входдешифратора 3 сигнала от датчика 72,т. е, после возвращения автооператора внижнее исходное положение,Очередные операции выполняются аналогично. 10 Формула изобретения ц Устройство для программного управления автооператором гальванической линии, содержащее датчики загрузки рабочих позиций линии, датчики горизонтального и вер тикального положения автооператора, исполнительные механизмы вертикального и 6горизонтального перемещения и дещифраторы программы вертикальных и горизонтальныхперемешений, отличающеес я тем, что, с целью повышения надежности работы устройства и его упрощения,прямые и инверсные входы дешифраторапрограммы подключены к датчикам загрузки рабочих позиций, выходы - к прямымвходам дешифраторов горизонтальных ивертикальных перемещений, датчики положения автооператора подключены к инверсным входам дешифратора горизонтальныхперемещений и прямым входам дешифратора вертикальных перемещений, датчики вертикального положения автооператора подключены к прямым входам дешифратора горизонтальных перемещений и инверснымвходам дешифратора вертикальных перемещений, выходы дешифраторов горизонтальных и вертикальных перемещений подключены к входам соответствующих исполнительных механизмов,оставитель В,3 емцовТехред И.Карандашова Корректор М.Лейзерьган Редактор Е.Гончар ж 1325 т 29 Зака одписно НИИП Р чдарственного комитета по делам изобретений н Москва, 113035, Раушска ета Мнннстро ткрытнн наб.,лиал ППП Патент", г. Ужгород, ул. Проектная,
СмотретьЗаявка
1972970, 26.11.1973
ГОСУДАРСТВЕННЫЙ ПРОЕКТНОЫЙ ИНСТИТУТ ХИМИЧЕСКОГО И НЕФТЯНОГО МАШИНОСТРОЕНИЯ
ГРЕНАДЕР МИХАИЛ ЕФИМОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: автооператором, гальванической, линии, программного
Опубликовано: 25.04.1976
Код ссылки
<a href="https://patents.su/4-511567-ustrojjstvo-dlya-programmnogo-upravleniya-avtooperatorom-galvanicheskojj-linii.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления автооператором гальванической линии</a>
Бесконтактный датчик крайнего положения

Номер патента: 1364856
Опубликовано: 07.01.1988
Авторы: Борисевич, Гинзбург, Пилевский
МПК: G01B 7/00
Метки: бесконтактный, датчик, крайнего, положения
...через нагрузочный резистор 6и диод 3 - к положительному полюсуисточника.Параллельно нагрузочному резистору 6 подключен сглаживающий конденсатор 7. Инвертор, представляющий собой ключевой усилитель постоянного 40 тока, собран на транзисторах 8 и 9 и резисторах 10 и 11. Точка соединения коллектора транзистора 5, резистора 6 и конденсатора 7 подключена к первому выводу резистора 10, второй 45 вывод которого подключен к базе транзистора 8. Коллектор транзистора 8 через резисторы 11 и 2 подключен к отрицательному полюсу источника.Эмиттер транзистора 8 подключен 50 к базе транзистора 9, коллектор которого подключен к катоду диода 12, а эмиттер - к катоду диода 13. Анод диода 12 подключен к отрицательному полюсу источника питания, а анод диода...
Датчик положения рабочего органа землеройно-транспортной машины

Номер патента: 901416
Опубликовано: 30.01.1982
Авторы: Егоров, Козлов, Кудиш, Шейнин
МПК: E02F 9/20
Метки: датчик, землеройно-транспортной, органа, положения, рабочего
...к появлению сил, препятствующих повороту щупа 9, Масса поворотной части щупа с опирающимся на него коленчатым рычагом 6 уравновешивается грузом 11 и поэтому дополнительная нагрузка от массы рычага 6 на копирный трос 12 не передается. При изменении размеров устройства, вызванных температурными деформациями, вибрациями, износом, имеющих место при эксплуатации землеройных машин, связь валика датчика со щупом, выполненных в виде самоустанавливающего механизма, не нарушает работу датчика высотного положения.Этим обеспечивается более высокая точность управления высотным положением рабочего органа.Использование датчика высотного положения снижает погрешность укладки дренажа, что позволит увеличить срок его службы и снижает эксплуатационные...
Гидравлический демпфер для маятниковой подвески датчика положения рабочего органа землеройной машины

Номер патента: 1173014
Опубликовано: 15.08.1985
Авторы: Егоров, Козлов, Чупрунов
Метки: гидравлический, датчика, демпфер, землеройной, маятниковой, органа, подвески, положения, рабочего
...инерционных возмущений подвеска датчика высотного положения 1 (фиг. 1) и инерционные массы клапанов 1 О занимают устойчивое среднее положение. В этом положении запорные элементы клапанов сообщают каналы 8 и 9 между собой и, тем самым, соединяют верхнюю и нижнюю полости цилиндров 6.В связи с этим при наклоне рабочего органа 3 поршни 7 свободно перемещаются в цилиндрах 6 и не увлекают за собой корпус подвески 1, В этом случае датчик высот. ного положения 4 изменяет свое вертикальное положение только при опускании и подьеме рабочего органа, а при наклоне последнего не меняет свою высотную координату. 5 10 15 20 25 30 35 40 45 50 При действии на рабочий орган инерционных возмущений подвеска датчика высотного положения перемещается вокруг...
Датчик высотного положения рабочего органа землеройной машины (его варианты)

Номер патента: 1208151
Опубликовано: 30.01.1986
Авторы: Егоров, Козлов, Магомедов
МПК: E02F 9/20
Метки: варианты, высотного, датчик, его, землеройной, органа, положения, рабочего
...в масло, заливаемое внутрь корпуса 1 ниже уровня подшипников 4,3,7,8,21 и 22,В датчике на фиг, 2 с электромеханическим блоком передачи движения указателю от ведомого звена механизма преобразования корпус, маятник и механизм преобразования угловых перемещений маятника относительно рабочего органа выполнены аналогично датчику на фиг. 1. Указатель 14 положения рабочего органа относительно копирной линии датчика на фиг, 2 выполнен в виде фотоприемника лазерного луча. Блок 19 передачи движения указателю от ведомого звена 11 механизма 9 преобразования помимо оси 20, рычага 23 и груза 24 включает потенциометр 16 и щуп 15, заимствованные от указате ля датчика на фиг. 1, электродвигатель 25 с редуктором 26; закрепленный на.маятнике 5,...
Датчик положения рабочего органа землеройной машины

Номер патента: 1313976
Опубликовано: 30.05.1987
Авторы: Егоров, Козлов, Шейнкер
МПК: E02F 9/20
Метки: датчик, землеройной, органа, положения, рабочего
...8 и может перемещаться по вертикали параллельно себе и фиксироваться в нужном положении, На горизонтальной штанге 5 закреплен измеритель 9 угловых перемещений. На выходном валике 1 О измерителя закреплен поворотный Г-образный щуп 11. Контактная часть поворотного щупа 11 опирается на копирный канат 12, устанавливаемый на специальных колышках 13, заделанных в грунт через определенное расстояние,На неподвижной вертикальной втулкежестко закреплен рычаг 14, шарнирно соединенный через тягу 15 с рычагом 16, который жестко закреплен на горизонтальной штанге 5. Горизонтальная штанга 5 выполнена поворотной в подшипнике 17, причем корпус подшипника закреплен неподвижно в нижней части вертикальной штан. ги 6.Датчик работает следующим...
Предыдущий патент: Устройство для управления движением робота
Следующий патент: Устройство для программного управления исполнительным органом станка
Случайный патент: Устройство для силового программного управления металлорежущими станками