Патенты с меткой «программыуправления»
Устройство для записи программыуправления промышленным роботом

Номер патента: 807216
Опубликовано: 23.02.1981
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
...12.Недостатком известного устройст является большое время записи программы для прямолинейных участков траектории в случае позиционного и рамкив бло- прии пеочку т пере полотся в четчики8072)Ь Формула изобретения Заказ 281/69 Тираж 951 Подписное ВНИИПИ Филиал 1 П 1 П "Патент", г, Ужгород, ул. Проектная,4 Ь, По окончании совмещения исполнительного органа 4 с первой точкой результат перемещения, занесенный в реверсивные счетчики Ь, по команде с блока 1 управления через вычислительный блок 7.поступает в блок 8 памяти. После этого оператор с по- помощью блока 2 обучения перемещает Исполнительный орган 4 в следующую точку заданной траектории. Если после записи положения исполнительного органа 4 в первой точке очередной участок траектории...
Устройство для записи программыуправления промышленным роботом
Номер патента: 807217
Опубликовано: 23.02.1981
Авторы: Губина, Загребельный, Куценко
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
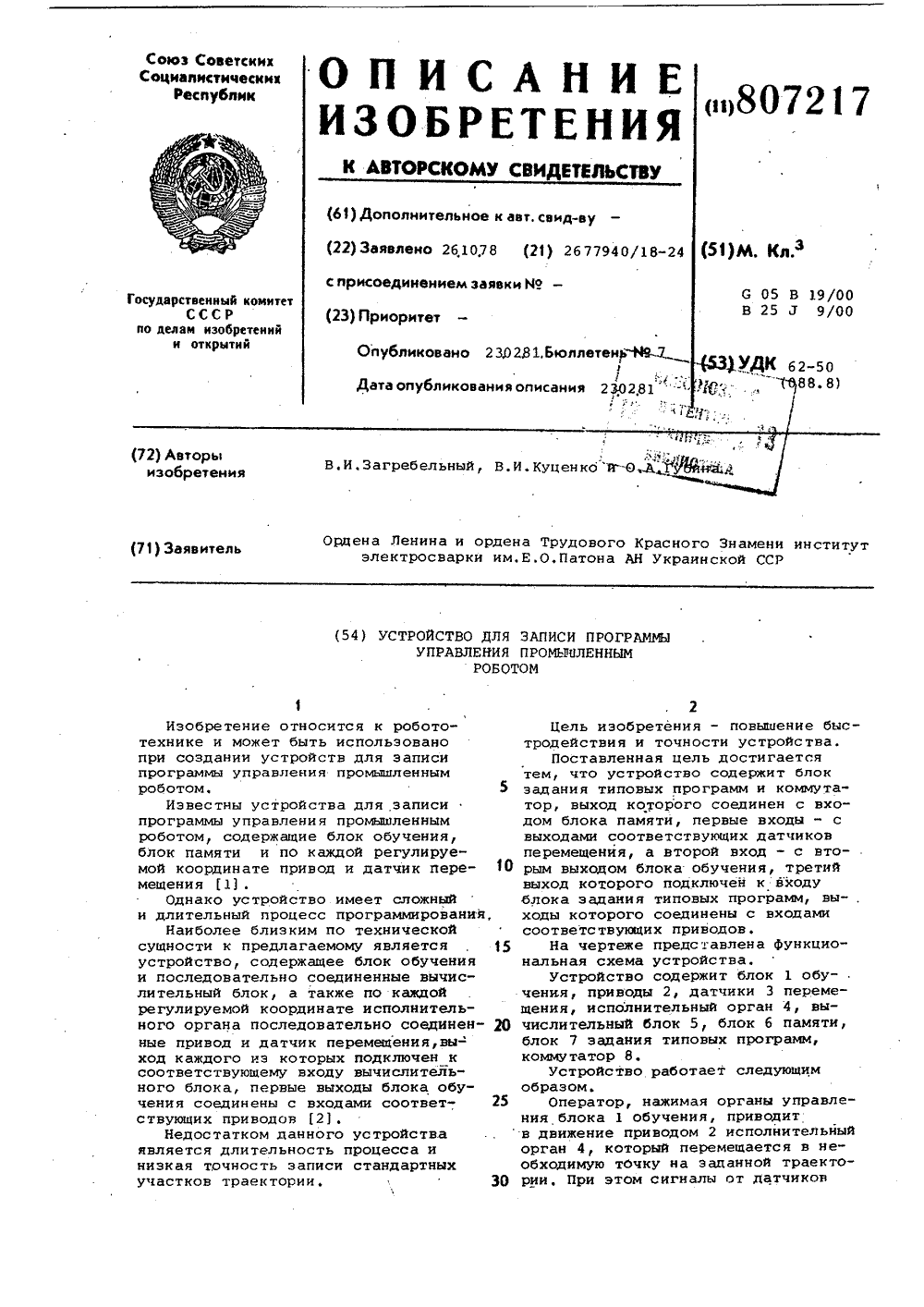
...исполнительный орган 4, вычислительный блок 5, блок 6 памяти,блок 7 задания типовых программ,коммутатор 8,Устройство работает следующимобразом,Оператор, нажимая орния блока 1 обучения, приводитв движение приводом 2 исполнительныйорган 4, который перемещается в необходимую тОчку на заданной траектории. При этом сигналы от датчиков8 О 721 г формула изобрет.ниц 1 69 Тираж 951 Подписно НИИПИ каз илиал ППП "Патент, г. Ужгород, ул. Проектна 3 перемещения поступают в вычислительный блок 5 и далее в блок б памяти, Так осуществляется запись программы для нетиповых участков траектории. Если же непосредственно за точкой записи следует типовой участок траектории, то оператор с помощью блока обучения подключает блок 7 задания типовых программ,...
Устройство для записи программыуправления промышленным роботом
Номер патента: 811203
Опубликовано: 07.03.1981
Авторы: Гудима, Кожухарь, Маличенко, Сергацкий, Спыну, Тимченко
МПК: G05B 19/00
Метки: записи, программыуправления, промышленным, роботом
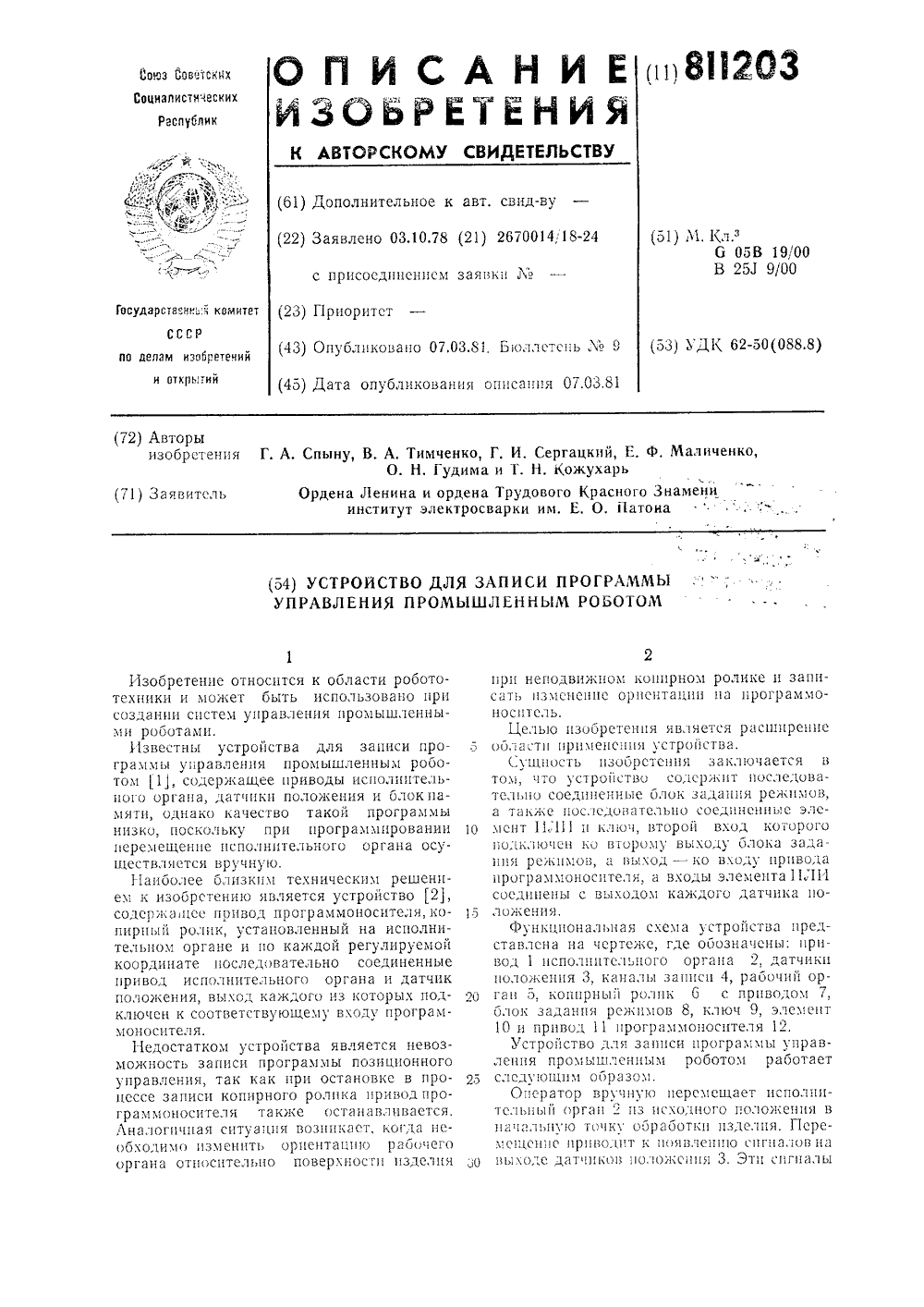
...12. Пос;Ее достижени 5 коцируеОЩим 1 эоликом 6 поверхности изделия оператор с; омощыо блока задания режимов 8 включает приводы 7 и 11 коцирного рог)ика 6 и )ЕрсеграэЕоносителя 12, задав предварительно требуемую скорость перемещеня. Оинхроцизация работы приводови 11 может оыть обеспечена как путем задания сигналов управления от одного переключателя блока задания ре 5)симов 8, так и соединением их с помощью э:Еектрического валя, 11 рижимая копирный ролик 6 к изделию, оператор осуществляет перемещение рабочего органа 5 цо заданной траектории, например цо линии сварного соединения, окрашиваемой поверхности и т. д, Перемещение исполнительного органа 2 с рабочим органом 5 вдоль заданной траектории осуществляется за счет сил трения между...