Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1654777
Автор: Самедов




Текст
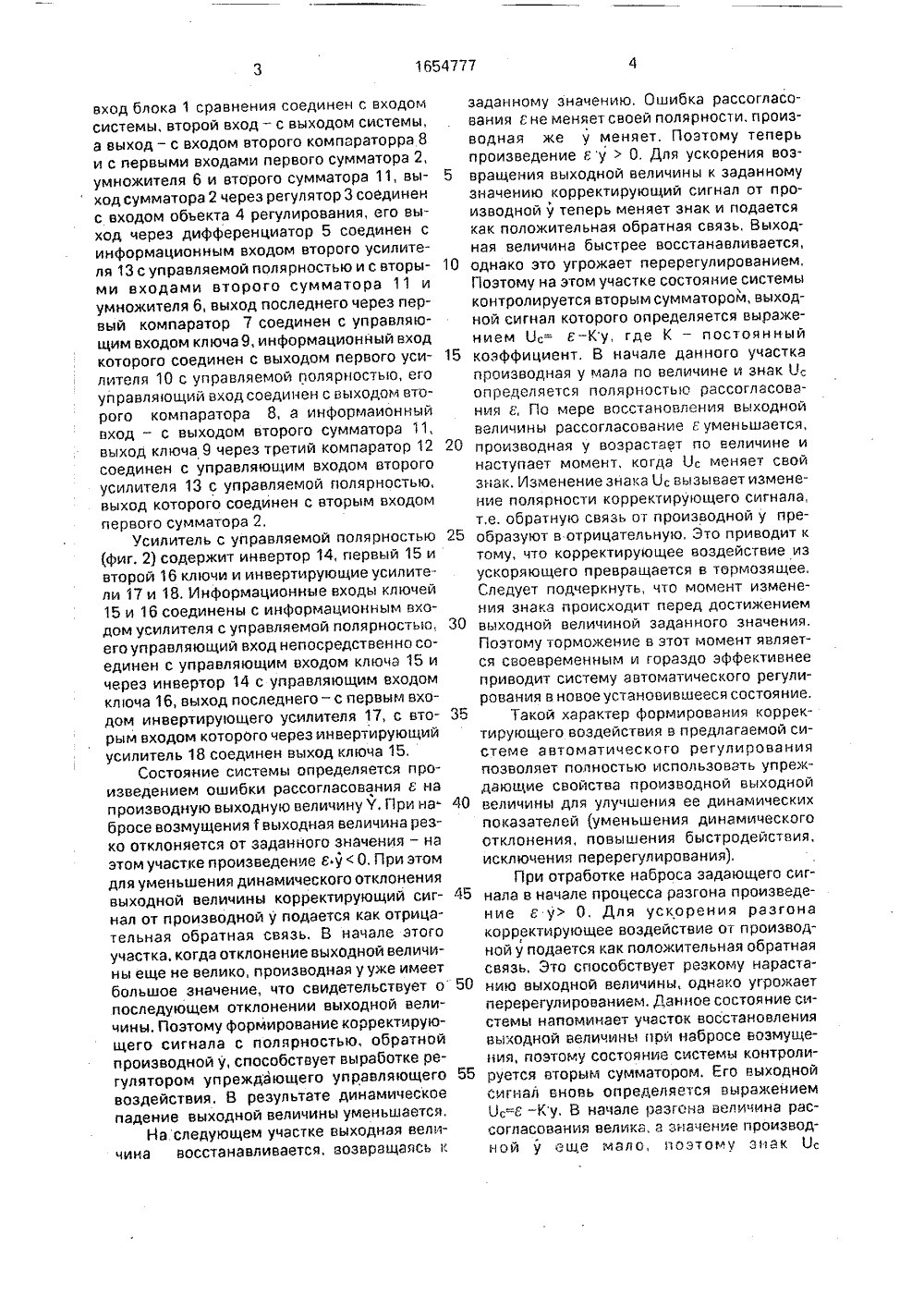
)5 6 05 В 11/О ЗО ОСУДАРСТВЕННЫЙ КОМИТЕТО ИЗОбРЕТЕНИЯМ И ОТКРЫТИЯМРИ ГКНТ СССР ОРСКОМУ СВИДЕТЕЛЬСТВ(71) Сумской филиал Харьковского политехнического института им. В. И. Ленина(56) Авторское свидетельство СССРМ 1413596, кл. О 05 В 11/01, 1988.(57) Изобретение относится к системам автоматического регулирования и может бытьиспользовано в системах электропривора вхимической, нефтехимической и других отраслях промышленности. Цель изобретения- повышение точности системы за счет улучшения качества регулирования на всех участках переходного процесса путемпереключения обратной связи по скоростивыходной величины в зависимости от состоИзобретение относится к системам автоматического регулирования и может быть использовано в системах электропривода в химической, нефтехимической и других отраслях промышленности.Цель изобретения - повышение точности системы за счет улучшения качества регулирования на всех участках переходного процесса путем переключения обратной связи по скорости выходной величины в зависимости от состояния системы регулирования для уменьшения динамического отклонения выходной величины, ускорения переходного процесса и исключения пере- регулирования во всех режимах работы системы. яния системы регулирования для уменьше. ния динамического отклонения выходной величины, ускорения переходного процесса и исключения перерегулирования во всех режимах работы системы, Цель достигается тем, что в систему автоматического регулирования введены первый компаратор и последовательно соединенные второй компаратор, первый усилитель с управляемой полярностью, ключ, третий компаратор и второй усилитель с управляемой полярностью, выход которого соединен с вторым входом первого сумматора, а информационный вход - с выходом дифференциатора, выход блока сравнения соединен с входом второго компаратора, выход умножителя через первый компаратор соединен с входом управления ключа, а выход второго сумматора соединен с информационным входом первого усилителя с управляемой полярностью. 2 ил. а функциональная схевания; на фиг, 2 - схема р мой полярностью, ования (фиг, 1) содеря, первый сумматор 2, 4 регулирования, дифжитель 6, первый 7 и ы, ключ 9, первый усимой полярностью, втоетий компаратор 12 и с управляемой поляробозначены сигнал ования, корректиру)овозмущение ), выходоизводная у, выходной матора 11 % Первый На фиг. 1 показан ма системы регулиро усилителя с управляеСистема регулир жит блок 1 сравнени регулятор 3, объект ференциатор 5, умно второй 8 компаоатор литель 10 с управляе рой сумматор 11, тр второй усилитель 13 ностью. На схеме я ошибки рассоглгс щее воздействие Ок ная величина у, ее пр сигнал второго сум5 10 15 20 30 35 40 45 ны еще не велико, производная у уже имеетбольшое значение, что свидетельствует о 50 вход блока 1 сравнения соединен с входом системы, второй вход - с выходом системы, а выход - с входом второго компараторра 8 и с первыми входами первого сумматора 2, умножителя 6 и второго сумматора 11, выход сумматора 2 через регулятор 3 соединен с входом обьекта 4 регулирования, его выход через дифференциатор 5 соединен с информационным входом второго усилителя 13 с управляемой полярностью и с вторыми входами второго сумматора 11 и умножителя 6, выход последнего через первый компаратор 7 соединен с управляющим входом ключа 9, информационный вход которого соединен с выходом первого усилителя 10 с управляемой полярностью, его управляющий вход соединен с выходом второго компаратора 8, а информаионный вход - с выходом второго сумматора 11, выход ключа 9 через третий компаратор 12 соединен с управляющим входом второго усилителя 13 с управляемой полярностью, выход которого соединен с вторым входом первого сумматора 2,Усилитель с управляемой полярностью (фиг. 2) содержит инвертор 14, первый 15 и второй 16 ключи и инвертирующие усилители 17 и 18. Информационные входы ключей 15 и 16 соединены с информационным входом усилителя с управляемой полярностью, его управляющий вход непосредственно соединен с управляющим входом ключа 15 и через инвертор 14 с управляющим входом ключа 16, выход последнего - с первым входом инвертирующего усилителя 17, с вторым входом которОго через инвертирующий усилитель 18 соединен выход ключа 15.Состояние системы определяется произведением ошибки рассогласования е на производную выходную величину У, При на. бросе возмущения 1 выходная величина резко отклоняется от заданного значения - на этом участке произведение я уО. При этом для уменьшения динамического отклонения выходной величины корректирующий сигнал от производной у подается как отрицательная обратная связь, В начале этого участка, когда отклонение выходной величипоследующем отклонении выходной величины. Поэтому формирование корректирующего сигнала с полярностью, обратной производной у, способствует выработке регулятором упреждающего управляющего воздействия. В результате динамическое падение выходной величины уменьшается.На следующем участке выходная величина восстанавливается, возвращаясь к заданному значению. Ошибка рассогласования я не меняет своей полярности, и роизводная же у меняет. Поэтому теперь произведение яуО. Для ускорения возвращения выходной величины к заданному значению корректирующий сигнал от производной у теперь меняет знак и подается как положительная обратная связь, Выходная величина быстрее восстанавливается, однако это угрожает перерегулированием, Поэтому на этом участке состояние системы контролируется вторым сумматором, выходной сигнал которого определяется выражением Ос= е - Ку, где К - постоянный коэффициент. В начале данного участка производная у мала по величине и знак Ос определяется полярностью рассогласования е, По мере восстановления выходной величины рассогласование е уменьшается, производная у возрастае по величине и наступае момент, когда Ос меняет свой знак. Изменение знака О вызывает изменение полярности корректирующего сигнала, т,е. обратную связь от производной у преобразуют в отрицательную, Это приводит к тому, что корректирующее воздействие из ускоряющего превращается в тормозящее, Следует подчеркнуть, что момент изменения знака происходит перед достижением выходной величиной заданного значения. Поэтому торможение в этот момент является своевременным и гораздо эффективнее приводит систему автоматического регулирования в новое установившееся состояние,Такой характер формирования корректирующего воздействия в предлагаемой системе автоматического регулирования позволяет полностью использовать упреждающие свойства производной выходной величины для улучшения ее динамических показателей уменьшения динамического отклонения, повышения быстродействия, исключения перерегулированифПри отработке наброса задающего сигнала в начале процесса разгона произведение е у О. Для ускорения разгона корректирующее воздействие от производной у подается как положительная обратная связь, Это способствует резкому нарастанию выходной величины, однако угрожает перерегулированием, Данное состояние системы напоминает участок восстановления выходной величины при набросе возмущения, поэтому состояние системы контролиоуется вторым сумматором. Его выходной сигнал вновь определяется выражением Ос=я -Ку, В начале разгона величина рассогласования велика, а значение производной у еще мало, поэтому знак Оопределяется полярностью рассогласования. По мере нарастания выходной величины ошибки рассогласования уменьшается, производная у возрастает, и перед достижением выходной величиной нового заданного значения выходной сигнал второго сумматора Ос меняет свой знак. Изменение знака Ос вызывает изменение полярности корректирующего воздействия, т,е, обратную связь от производной у из положительной преобразуют в отрицательную. Это приводит к тому, что корректирующее воздействие из ускоряющего превращается в тормозящее. Такое своевременное торможение эффективно приводит систему автоматического регулирования к новому заданному значению, Следует отметить, что чем больше скорость изменения выходной величины, т,е, значение у, тем раньше, до момента достижения выходной величиной заданного значения, происходит переключение ускоряющего корректирующего воздействия на тормозящее, что необходимо для быстрейшего перевода системы из одного состояния в другое без перерегулирования.Система работает следующим образом.Последовательно соединенные блок 1 сравнения, первый сумматор 2, регулятор 3 и обьект 4 регулирования, охваченнь;е главной обратной связью с выхода на вход, образуют типовую систему автоматического регулирования по отклонению фиг. 1), Цепь дифференциатор 5 - второй усилитель 13 с управляемой полярностью служит для формироаания корректирующего воздействия О, пропорционального производной у выходной величины. Остальные элементы системы контролируют ее состояние и определяют знак Ок, Произведение .=, у с выхода умножителя 6 поступает на вход первого компаратора 7, выходной сигнал которого равен логической единице при е у 0 и логическому нулю при е у О. Аналогично работают второй 8 и третий 12 компараторы, Сигнал с выхода первого компаратора 7 поступает на управляющий вход ключа 9, При сигнале логического нуля ключ 9 находится в закрытом состоянии, а при сигнале логической единицы он открывается и пропускает выходной сигнал первого усилителя 10 с управляемой полярностью на вход третьего компаратора 12, Выходной сигнал второго сумматора 11 определяется выражением О=к - Ку, где К - постоянный коэффициент. Выходной сигнал второго компаратора 8 поступает на управляющий вход первого усилителя 10 с управляемой полярностью и определяет по лярность его выходного сигнала, а выходной сигнал третьего компаратора 12 поступает на управляющий вход второго усилителя 13 с управляемой полярностью и определяет в5 конечном счете знак корректирующего воэдействия О Если на управляющем входе усилителя с управляемой полярностью (фиг, 2) сигнал равен логическому нулю. то на выходе инвертора 14 сигнал равен логической единице, Поэтому ключ 15 закрыт, а ключ 16 открыт, и сигнал с информационного входа через него поступает на первый вход инвер 10 тирующего усилителя 17, При этом полярность сигнала на выходе усилителя управляемой полярности противоположна 15 полярности сигнала на его информационном входе. Если на управляющем входе сигнал равен логической единице, то ключ 16 нал с информационного входа через него поступает на вход инвертирующего усилителя 18, меняет свою полярность и затем посгупает на второй вход инвертирующего 25 усилителя 17, где еще раз меняет знак, В результате полярности сигналов на информационном входе и на выходе совпадают, Коэффициент передачи усилителя с управляемой полярностью устанавливается соотношением резистооов К 1 и В 2.Контроль состояния системы ав 1 пматического регулирования производится по произведению г у и сигналу Ос= г -К у, Если произведение г уО. то вне зависимости от сигнала Ос имеет место отклонение выходной величины от заданного значения в результате наброса возмущения 1. При этом 30 35 для уменьшения динамического отклонения выходной величины корректирующее воздеисггие осуществляется как отрицательная обратная связ от производной у, Когда же произведение е уО, то выходная величина начинает возвращаться к заданному значению - зто состояние имеет место и при набросе задающего сигнала. На этом участке для ускорения возвращения выходной величины к заданному значению корректирующее воздействие осуществляется как положительная обратна связь от производ 50 ной у, Чо это угрожает перерегулированием, поэтому перед возвращением выходнои величины к заданному значению производится торможение системы путем переключения положительной обратной связи от производной у е отрицательную. Это переключение осуществляется по Знаку сигнала Ос, В начале этого участка ошибка рассогласования я имеет большое значение, а производная у - малое, Поэтому знак сигнала 20 .Закрывается, а ключ 15 открывается, и сиг 1654777И определяется знаком г, который и устанавливает положительную обратную связь по у, По мере приближения выходной величйны к заданному значению г уменьшается, а производная у возрастает по величине. Наступает момент, когда О меняет знак, что и служит сигналом к переключению положительной обратной связи от производной у в отрицательную, благодаря чему начинается своевременное торможение и исключается перерегулироввние.Таким обрезом, в предлагаемой системе автоматического регулирования полностью используется корректирующее действие йроизводной выходной величины .для повышения качества регулирования (уменьшения динамического отклонения, повышения быстродействия, исключения перерегулирования). Если регулятор в системе автоматического регулирования построен иа основе микропроцессора или микро ЗВМ, то реализация предлагаемого способа коррекции не вызывает сложностей, так как в алгоритм работы регулятора добавляется несколько строк программы. Формула изобретения Система регулирования, содержащаяпоследовательно соединенныеблок сравнения, первый сумматор, регулятор, обьект ре- Б гулирования и диФФеренциатор, входкоторого соединен. с вычитающим входом блока сравнения, а выход - с первыми входами второго сумматора и умножителя, вторые входы которых соединены с выходом О блока сравнения, о т л и ч а ю ща я с я тем,что, с целью повышения точности, она содержит первый компаратор и последовательно соединенные второй компаратор, первый усилитель с управляемой полярно стью, ключ, третий компаратор и второй усилитель с управляемой полярностью, выход которого соединен с вторым входом первого сумматора, а информационный вход - с выходом дифФеренциатора, выход блока срав нения соединен с входом второгокомпаратора, выход умножителя через первый компаратор - с входом управления клю ча, а выход второго сумматора - с входом управления первого усилителя с управляе мой полярностью.оставитель А. Лащевехред М.Моргентал Кор М, Демчи Юрковецк еда роизводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 1 Закаэ 195 ВНИИТираж 477осударственного комитета по иэоб 113035, Москва, Ж-Э 5, Рау Подписноеениям и открытиям при ГКНТ СССкая наб., 4/5
СмотретьЗаявка
4610145, 28.11.1988
СУМСКОЙ ФИЛИАЛ ХАРЬКОВСКОГО ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА ИМ. В. И. ЛЕНИНА
САМЕДОВ ЮСИФ ФАХРАТ ОГЛЫ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 07.06.1991
Код ссылки
<a href="https://patents.su/5-1654777-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Усилитель записи телевизионного сигнала

Номер патента: 1228299
Опубликовано: 30.04.1986
МПК: H04N 5/14
Метки: записи, сигнала, телевизионного, усилитель
...записи телевизионногосигнала работает следующим образом.Входной видеосигнал в режиме "Запись" проходит через управляемыйключ 1 на вход усилителя 2. Усиленный видеосигнал через первый конденсатор 4 поступает на вход выходногоусилителя 3, а через второй конденсатор 5 - на вход управления управляемого источника 11 .тока. Блок 10 включения режима "Запись" определяетуровень "черного" на выходе усилителя записи телевизионного сигнала приотсутствии входного сигнала. Благодаря управляемому источнику 11 токаи блоку 9 привязки обеспечена неискаженная передача отрицательных перепадов напряжения. Блок 12 включениярежима Считывание" и блок 13 включения режима "Стирание" определяют выходное напряжение усилителя записителевизионного сигнала...
Система управления объектом с несколькими управляющими входами

Номер патента: 1287105
Опубликовано: 30.01.1987
Авторы: Авдеев, Киселев, Мышляев, Попов, Соловьев
МПК: G05B 13/04
Метки: входами, несколькими, объектом, управляющими
...с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине И(С) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения, где умножается на коэффициент К (С), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В результате на выходе блока 18 умножения формируется сигнал о величине ьц (С) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации тт(С)дЦ (С) : К (с)ьт(с)., (6) выходов соответственно четвертого 40и первого 16 элементов сравнения, поформуле 11 дц В.-К,ОУ,ф1 У 1 дВ 7 -Я у+ 1 т(е-.) 40 45 50 55 7 1 3-й порции материала в объекте управления,Сигнал у(С) об усредненном...
Управляемый одновибратор

Номер патента: 826553
Опубликовано: 30.04.1981
МПК: H03K 3/284
Метки: одновибратор, управляемый
...заряда накопительного коцценсатора, в связи с этим близкое к нулю, значениенапряжения насьпцения разрядного транзистораисточника температурной нестабильности длительности формируемого импульса 4На чертеже изображен управляемый мультивибратор, принципиальная схема.Устройство содержит ЯБ-триггер 1, на установочный вход которого подаются запускаю. щие импульсы, а инверсный выход Я подклю. чен через резистор 2 к базе разрядного транзистора 3, включенного параллельно накопительному конденсатору 4, точка соединения которых соединена с выходом источника 5 постоянного тока и одним входом компаратора 6, на второй вход которого подается управляющее напряжение, выход компаратора соединен с входом сброса Я-триггера 1, Источник постоянного тока...
Мкогоканальмый декодирующий преобразователь «цифровой код угол поворота вала»

Номер патента: 199505
Опубликовано: 01.01.1967
МПК: G05B 19/00, H03M 1/66
Метки: вала, декодирующий, код, мкогоканальмый, поворота, угол, цифровой
...зависит от значпости кода, а с другой стороны на нее влияет нестабильность усиления в усилителе следящей системы.Существует положительная вероятность того, что до окончания преобразования одного кода из ЦУМ поступят кодограммы, соответствующие всем остальным ЛД. Чтобы кодо- грамма не была потеряна и не получила отказ, опа должна быть помещена в отдельный регистр. Очередь образуется также в том случае, когда поток кодограмм детерминирован (для ЦУМ с жестким циклом работы), а длительность преобразования - случайная величина с некоторым законом распределения.Итак, после записи кодограммы в первом регистре триггер Т,разблокирует вентиль И, и после прихода импульса с выхода б РУ на выходе схемы И возникает импульс считывания, который...
Способ компенсации запаздывания быстродействующих магнитных усилителей в системах автоматического регулирования

Номер патента: 269251
Опубликовано: 01.01.1970
Авторы: Боровиков, Инешин, Логинов
МПК: G05B 11/06, G05B 17/00
Метки: быстродействующих, запаздывания, компенсации, магнитных, системах, усилителей
...кривой рабочего напряжения Ур в рабочий и управляющий полупериоды в установившемся режиме равны. Поэтому среднее значение суммы напряжений на рабочих обмотках сердечника А и сердечника В (Лр -- Урл +Урв) равно нулю, а сама сумма изменяется с двойной частотой по сравнению с частотой сети,Пусть в момент 1, происходит скачкообразное увеличение входного сигнала У БМУ, вызывающее увеличение выходного напряжения. Этот момент совпадает с началом рабочего полупериода для сердечника А, когда рабочая обмотка УрА подключена к сети, поэтому форма напряжения на ней не изменится, не изменится также и выходное напряжение в этом полупериоде. Но для сердечника В момент 11 является началом управляющего полупериода, когда рабочая обмотка отключена...
Предыдущий патент: Способ коррекции систем автоматического управления с резонансным пиком в амплитудно-частотной характеристике
Следующий патент: Устройство для программного управления кинопроектором
Случайный патент: Рабочий орган каналокопателя