Система регулирования положения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1795416
Автор: Орлянская
Текст
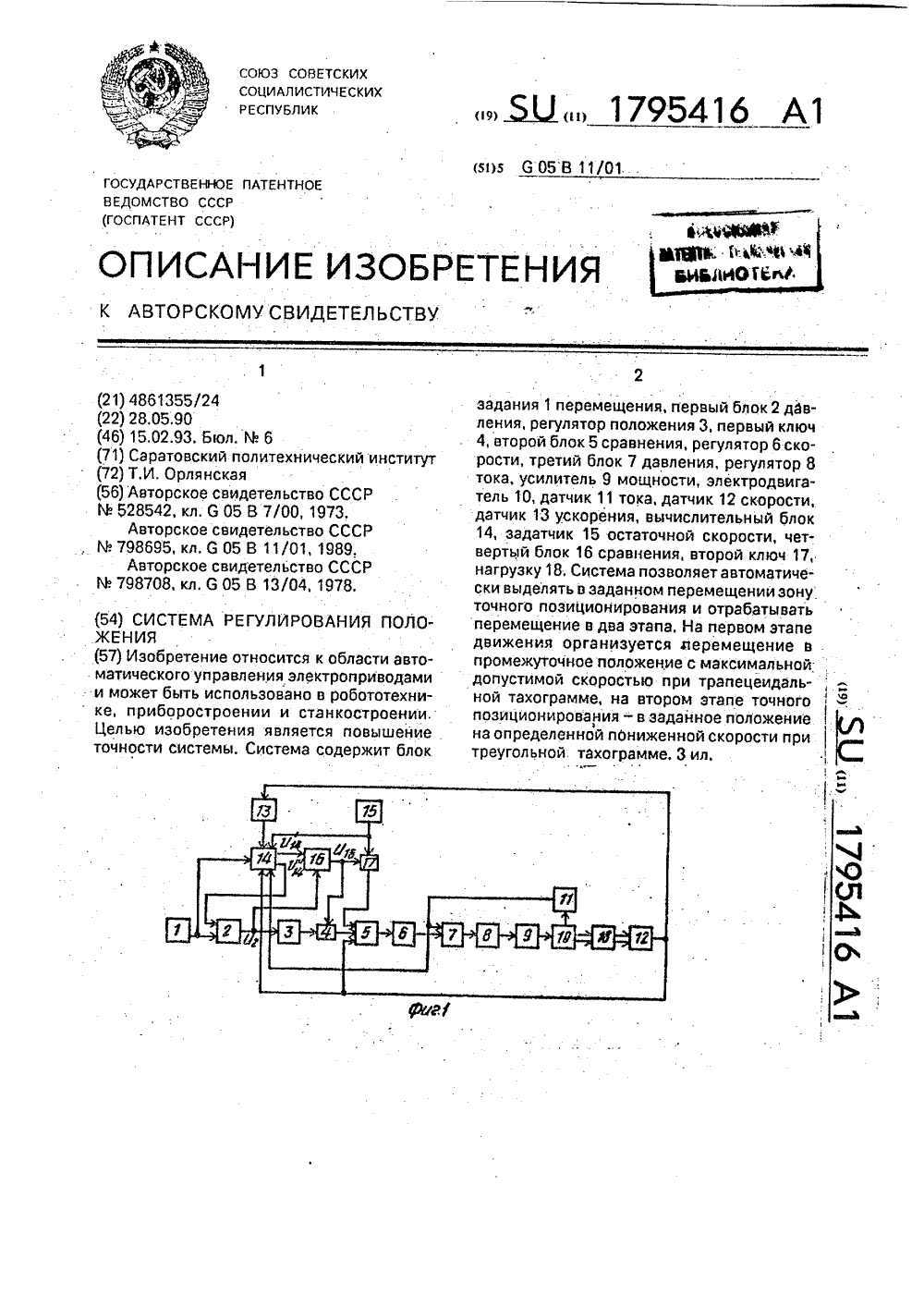
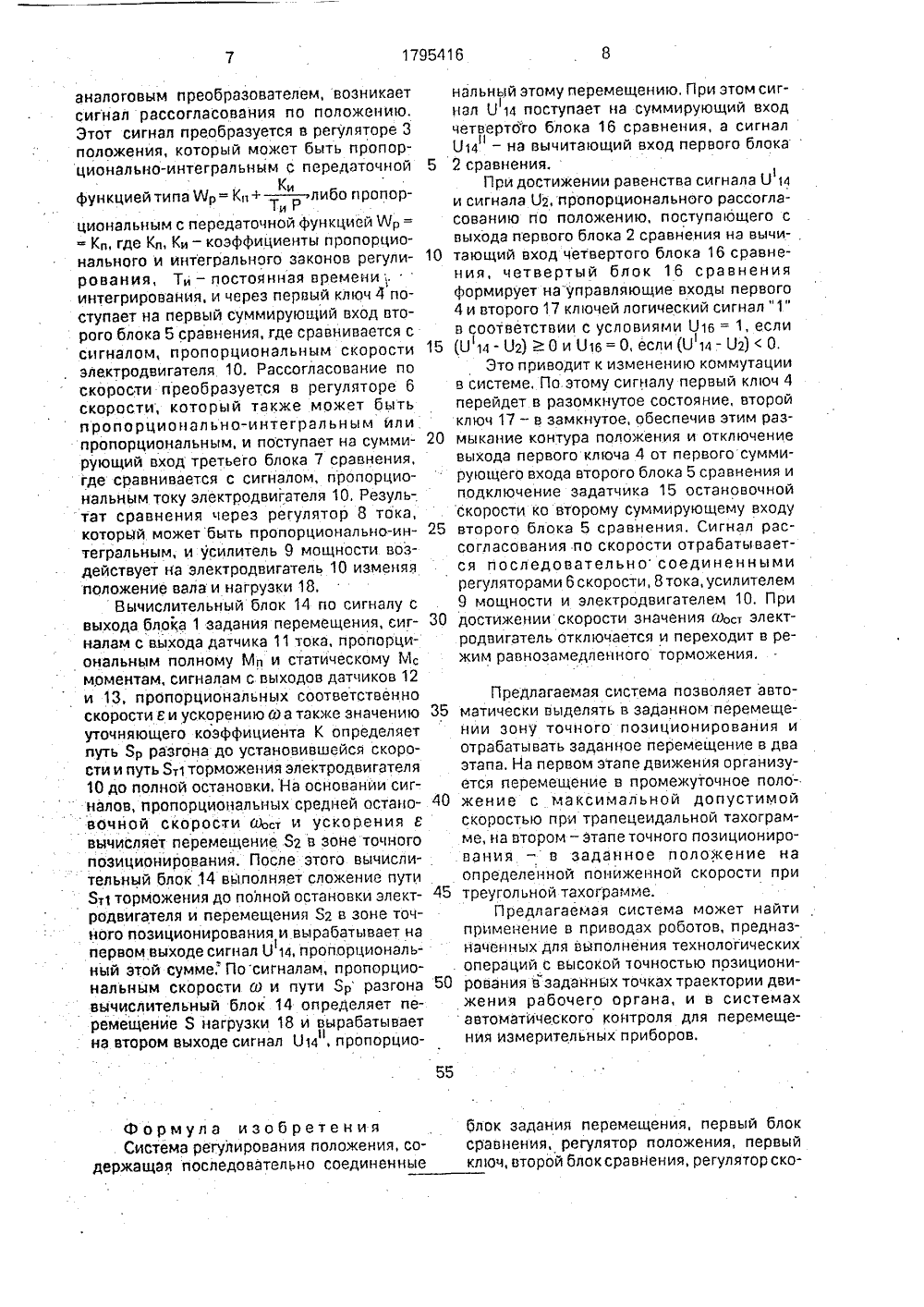
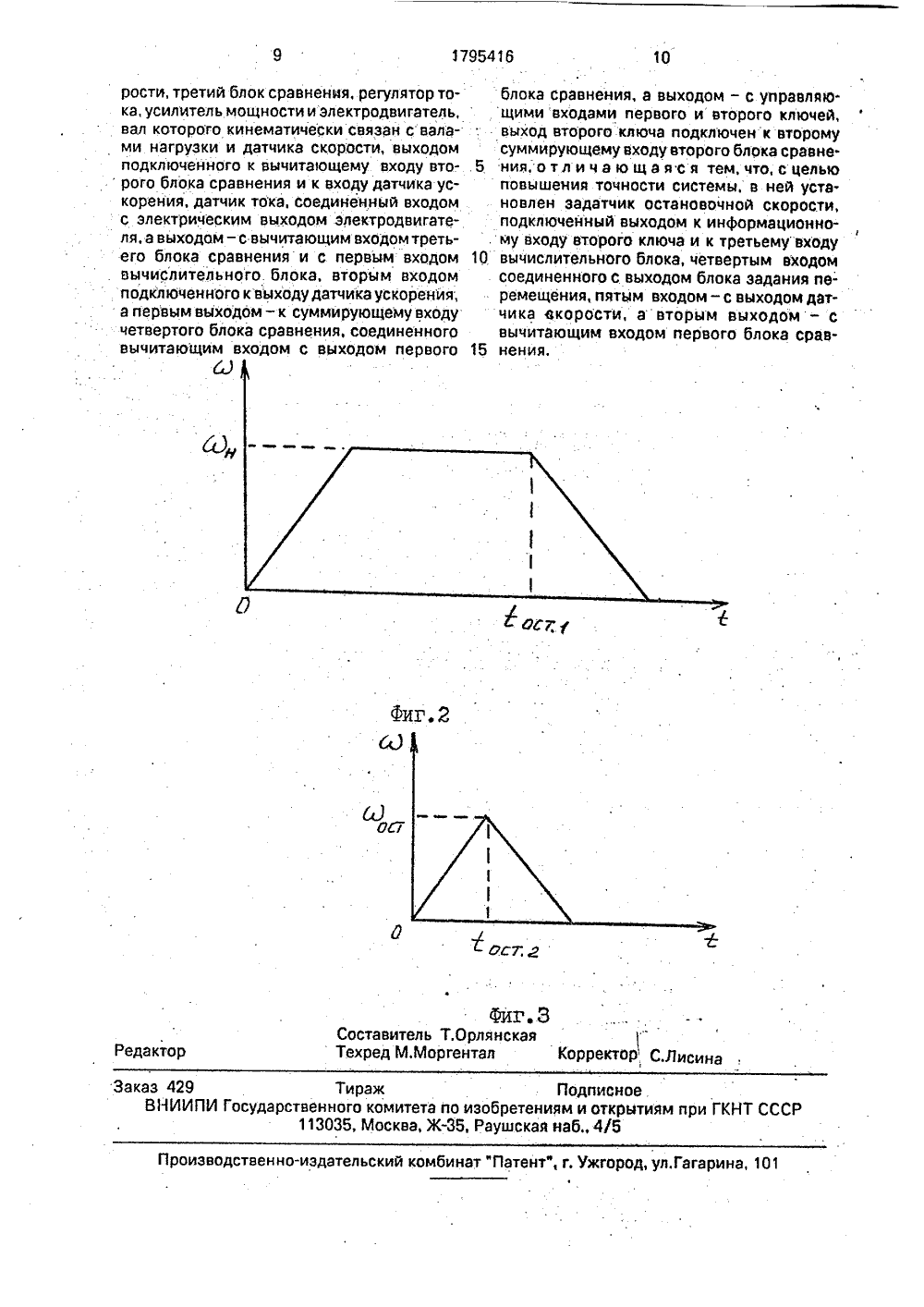
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК с 5 ю 6 05 В 11/О ОСУДАРСТВЕННОЕ ПАТЕНТНОЕДОМСТВО СССРОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБРЕТЕН ИДЕТЕЛЬСТВУ АВТОРСКО ОЛО(21) 4861355/24(71) Саратовский политехнический институт (72) Т.И. Орлянская(56) Авторское свидетельство СССР М 528542, кл. 605 В 7/00, 1973.Авторское свидетельство СССР М 798695, кл, 6 05 В 11/01, 1989,Авторское свидетельство СССР В 798708, кл. 6 05 В 13/04, 1978.(57) Изобретение относится к области автоматического управления электроприводами и может быть использовано в робототехнике, приборостроении и станкостроении. Целью изобретения является повышейие точности системы. Система содержит блок.Ц. 179541 б А 1 задания 1 перемещения, первый блок 2 давления, регулятор положения 3, первый ключ 4, второй блок 5 сравнения, регулятор 6 скорости, третий блок 7 давления, регулятор 8 тока, усилитель 9 мощности, электродвигатель 10, датчик 11 тока, датчик 12 скорости, датчик 13 ускорения, вычислительный блок 14, задатчик 15 остаточной скорости, четвертый блок 16 сравнения, второй ключ 17, нагрузку 18; Система позволяет автоматически выделять в заданном перемещении зону точного позиционирования и отрабатывать перемещение в два этапа, На первом этапе движения организуется деремещение в промежуточное положение с максимальной допустимой скоростью при трапецеидальной тахограмме, на втором этапе точного3 позиционирования - в заданное положение на определенной пониженной скорости при треугольной тахограмме. 3 ил.25 ном перемещении зонутонного позициони. со Изобретение относится к области автоматического управления электроприводами и может быть использовано в робототехнике, приборостроении и станкостроении.Известны устройства управления, в 5 .которых повышение точности позиционирования достигается исключением несоответствия законов изменения пути и скорости при ограницении производной пути по времени напротекание процесса при 10 отработке перемещения. Искл юцение этого влияния обеспечивается размыканием контура положения системы при отработке перемещения, а определение момента времени начала торможения выполняется 15 схемой отработки информации о скорости, пусковом и статицеском моментах привода, а также об установившемся пути отработки исполнительного органа. Недостатком указанных устройств яв ляется их низкая точность позиционирования, обусловленная тем, что они не позволяют при расчете момента времени начала торможения учитывать изменения инерционных масс, связанных с валом электродвигателя, и статического момента сопротивления исполнительного органа. Наиболее близким по технической сущности к предлагаемому является устройство 30 для адаптивного управления позиционным электроприводом, содержащее последовательно соединенные блок задания перемещения, первый блок сравнения, регулятор положения, первый ключ, второй блок срав нения, регулятор скорости, третий блок сравнения, регулятор тока, усилитель мощности и электродвигатель, вал которого кинематицески связан с валами нагрузки и датчика скорости, выходом подключенного 40 к вычитающему входу второго блока сравнения и ко входу датчика ускорения, датчик тока, соединенный входом с электрическим выходом электродвигателя, а выходом с вычита 1 ощим входом третьего блока сравне ния и с первым входом вьчислительного блока, вторым входом подключенного к выходу датчика ускорения, а первым выходом к суммирующему входу. четвертого блока сравнения, соединенного вычитающим вхо дом с выходом первого блока сравнения, а выходом - с управляющим входом второго ключа, выход которого подклюцен ко второМу суммирующему входу второго блокасравнения, 55Недостатком известного устройства является его низкая тоцность позиционирования, обусловленная тем, что оно не позволяет автоматически выделять в заданрования и отрабатывать движение в ней с определенной пониженной скоростью.Цель изобретения - повышение точности системы.Эта цель достигается тем, что в устройство, содержащее последовательно соединенные блок задания перемещения, первый блок сравнения, регулятор положения, первый ключ, второй блок сравнения, регулятор скорости, третий блок сравнения, регулятор тока; усилитель мощности и электродвигатель, вал которого кинематически связан с. валами нагрузки и датцика скорости, выходом подключенного к вычитающему входу которого блока сравнения и ко входу датчика ускорения, датцик тока, соединенный входом с электрическим выходом электродвигателя, а выходом с вычитающим входом третьего блока сравнения и с первым входом вычислительного блока, вторым входом подключенного к выходу датчика ускорения, а первым выходом - к суммирующему входу четвертого блока сравнения, соединенного вычитающим входом с выходом первого блока сравнения, а выходом с управляющим входом второго ключа, выход которого подключен ко второму суммирующему входу второго блока сравнения, установлен задатчик остановочной скорости, подключенный выходом к информационному входу второго ключа и к третьему входу вычислительного блока, четвертым входом соединенного с выходом блока задания перемещения, пять 1 м входом - с выходом датчика скорости, вторым выходом - с выцитающим входом первого блока сравнения и выходом четвертого блока сравнения соединенного с управляющим входом первого ключамНа фиг.1 представлена структурная схема предлагаемой системы регулирования положения; на фиг.2 - трапецеидальный график изменения скорости; на фиг.З - треугольный график изменения скорости. Устройство содержит последовательно соединенный блок 1 задания перемещения, первый блок 2 сравнения, регулятор 3 положения, первый ключ 4, второй блок 5 сравнения, регулятор б скорости, третий блок 7 сравнения, регулятор 8 тока, усилитель 9 мощности электродвигатель 10, электрический выход которого соединен с датчиком 11 тока, а вал кинематически связан с датчиком 12 скорости, который через датчик 13 ускорений соединен с вычислительным блоком 14, который в свою очередь соединен с задатчиком 15 остановочной скорости, а через четвертый блок 16 сравнения соединенвторым ключом 17, кроме того вал электродвигателя кинематически связан с валом нагрузки 18.Система автоматически выделяет в заданном перемещении зону точного позиционирования и обеспечивает отработку движения в два этапа. На первом этапе осуществляется перемещение в промежуточное положение с максимальной допустимой скоростью при трапецеидальной тахограмме (фиг.2). На втором - этапе точного позиционирования - в заданное положение с определенной пониженной скоростью при треугольной тахограмме (фиг.З),Момент торможения на первом этапе движения определяется равенством рассогласования по положению перемещению Ь. определяемому выражением Ят = ЯТ 1+ Я 2,где Ь 1 - путь торможения до полной оста. новки электродвигателя на первом этапе движения;Яг - перемещение в зоне точного позиционирования,ПУТЬ тОРМОжЕНИЯ Ят 1 Да ПОЛНОЙ ОСтановки электродвигателя определяется выражением. Ят 1= Яр К,Мп - Мс Мп+ Мс(2) где Яр - путь разгона да.максимальной допустимой установившейся скорости;К - уточняющий коэффициент;Мп, Мс - соответственно полный и статический моменты электродвигателя.Путь разгона Яр определяется согласно выражению Яр = аг/2 Е,(3) где й), е- скорость и ускорение электродвигателя,Перемещение в зоне точного позиционирования Я 2 определяется выражением. где вост - средняя остановочная скорость.Значение средней остановочной скоро-. сти вос рассчитывается до настройки системы исходя иэ максимальной допустимой погрешности позиционирования ЬуЪах.доп, с учетом отклонения параметров системы согласно выражениюЖостгдеК 11 ЛЖвахйС + Ь йвах/1 с(ЮвахИср ) (твах 11 ср ) ,еср - среднее значение ускорения тор 10 можения,тср - среднее время срабатывания аппаратуры системы;асср - средний приведенный к валу дви-.гателя момент инерции;Мдин.ср - среднее значение динамического момента на валу электродвигателя;Ь ОЪах, Лвах Ь Мдин.ва - отклоненияпараметров электродвигателя от среднихзначений.20 В период настройки системы на выходезадатчика 15 остановачной скорости, который может быть источником напряжения,выставляютсигнал, пропорциональный расчетному значению йЪст.25 Зависимости(1), (2),(3) и(4) реализуютсявычислительным блоком 14, который можетбыть микропроцессором или малой управляющей вычислительной машиной, подачейна его входы сигналов, пропорциональных .30 Мп полному и Мс статическому моментамэлектродвигателя 10 с выхода датчика 11тока в различное время отработки перемещения на первом этапе движения, вскорости,е ускорения, поступающих соответственно с35 выходов датчиков 12 скорости, 13 ускоренийи сигнала, пропорционального средней оста-новочной скорости аост с выхода задатчика 15остановочной скорости,Кроме того, вычислительный блок 14 оп 40 ределяет перемещение Я нагрузки 18 приразгоне в соответствии с выражением (3), апри достижении установившейся скоростисогласно выражению Я = Яр + ш т, где т -время движения с установившейся скоро 45 стью,Система работает следующим образом.В исходном состоянии сигнал рассогласования по положению равен нулю. Сигналы на входах регулятора 6 скорости,вычислительного блока 14 и четвертого блока 16 сравнения, который может быть сум.мирующим компаратором, отсутствуют, Науправляющих входах первого 4 и второго 17ключей логический сигнал ф 0". Благодаря55 чему первый ключ 4 находится в замкнутом,а второй ключ 17 в разомкнутом состоянии,При подаче сигнала на отработку перемещения на выходе первого блока 2сравнения, который может быть дискретно1795416 10 15 20 25 30 35 40 45 50 аналоговым преобразователем, возникает сигнал рассогласования по положению. Этот сигнал преобразуется в регуляторе 3 положения, который может быть пропорционально-интегральным с передаточнойКифункциейтипа В/р= Кп+ либо пропорТи Рциональным с передаточной функцией Ир = - Кп, где Кв Ки - коэффициенты пропорционального и интегрального законов регулирования, Т - постоянная времени;, интегрирования, и через первый ключ 4 поступает на первый суммирующий вход второго блока 5 сравнения, где сравнивается с сигналом, пропорциональным скорости электродвигателя 10. Рассогласование по скорости преобразуется в регуляторе б скорости, который также может быть пропорционально-интегральным или пропорциональным, и поступает на суммирующий вход третьего блока 7 сравнения, где сравнивается с сигналом, пропорциональным току электродвигателя 10. Результат сравнения через регулятор 8 тока, который можетбыть пропорционапьно-интегральным, и усилитель 9 мощности воздействует на электродвигатель 10 изменяя положение вала и нагрузки 18.Вычислительный блок 14 по сигналу с выхода блока 1 задания перемещения, сигналам с выхода датчика 11 тока, пропорциональным полному Мр и статическому Мс моментам, сигналам с выходов датчиков 12 и 13, пропорциональных соответственно скорости и и ускорению а а также значению уточняющего коэффициента К определяет путь Яр разгона до установившейся скорости и путь Ят 1 торможения электродвигателя 10 до полной остановки.На основании сигналов, пропорциональных средней остановочной скорости о 0 ст и ускорения я вычисляет перемещение Я 2 в зоне точного позиционирования. После этого вычислительный блок 14 выполняет сложение пути Ят 1 торможения до полной остановки электродвигателя и перемещения Я 2 в зоне точного позиционирования и вьрабатывает на первом выходе сигнал О 14, пропорциональный этой сумме. Посигналам, пропорциональным скорости со и пути Яр разгона вычислительный блок 14 определяет перемещение Я нагрузки 18 и вырабатьвает на втором выходе сигнал О 14, пропорциоФормула изобретения Система регулирования положения, содержащая последовательно соединенные нальный этому перемещению, При этом сигнал О 1 л поступает на суммирующий входчетвертого блока 16 сравнения, а сигнал О 4 - на вычитающий вход первого блока2 сравнения,При достижении равенства сигнала О аи сигнала О 2, пропорционального рассогласовэнию по положению, поступающего с выхода первого блока 2 сравнения на вычитающий вход четвертого блока 16 сравнения, четвертый блок 16 сравнения формирует на-управляющие входы первого 4 и второго 17 клочей логический сигнал "1" в соответствии с условиями Оы = 1, если (О ц - Ог)0 и В 6 = О, если (О 14 - й)О.Это приводит к изменению коммутации в системе. Па этому сигналу первый ключ 4 перейдет в разомкнутое состояние, второй ключ 17 - в замкнутое, обеспечив этим размыкание контура полокения и отключение выхода первого ключа 4 от первого суммирующего входа второго блока 5 сравнения и подключение задатчика 15 остановочной скорости ко второму суммирующему входу второго блока 5 сравнения. Сигнал рассогласования по скорости отрабатывается последовательно соединенными регуляторами б скорости, 8 тока, усилителем 9 мощности и электродвигателем 10. При достижении скорости значения иЫ электродвигатель отключается и переходит в режим равнозамедпенного торможения. Предлагаемая система позволяет автоматически выделять в заданном перемещении зону точного позиционирования и отрабатывать заданное перемещение в два этапа, Нэ первом этапе движения организуется перемещение в промежуточное положение с максимальной допустимой скоростью при трапецеидальной тахограмме, на втором - этапе точного позиционирования - в заданное положение на определенной пониженной скорости при треугольной тахогра "лме Предлагаемая система может найти применение в приводах роботов, предназначенных дпя выполнения технологических операций с высокой точностью позиционирования в заданных точках траектории движения рабочего органа, и в системахавтоматического контроля для перемещения измерительных приборов. блок задания перемещения, первый блок сравнения, регулятор положения, первый клоч, второй блок сравнения, регулятор ско10 1795416 Фиг.2 РРектоР С.Лиси Фи .Составитель Т.ОрлянскаяТехред М.Моргентал Редактор Тираж Подписноерственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 4/5 каз 429 ВНИИЛИ Гос роизводственно-иэдательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 рости, третий блок сравнения, регулятор тока, усилитель мощности иэлектродвигатель, вал которого кинематически связан с валами нагрузки и датчика скорости, выходом подключенного к вычитающему входу вто рого блока сравнения и к входу датчика ускорения, датчик тока, соединенный входом с электрическим выходом электродвигателя, а выходам - с вычитающим входом третьего блока сравнения и с первым входом вычислительного блока, вторым входом подключенного к выходу датчика ускорения, а первым выходом - к суммирующему входу четвертого блока сравнения, соединенного вычитающим входом с выходом первого блока сравнения, а выходом - с управляющими входами первого и второго ключей, выход второго ключа подключен к второму суммирующему входу второго блока сравне ния,отличающаяся тем,что,сцельюповышения точности системы, в ней установлен задатчик остановочной скорости, подключенный выходом к информационному входу второго ключа и к третьему-входу 10 вычислительного блока, четвертым входомсоединенного с. выходом блока задания перемещения, пятым входом - с выходом датчика скорости, а вторым выходом - с вычитающим входом первого блока срав нения.
СмотретьЗаявка
4861355, 28.05.1990
САРАТОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ОРЛЯНСКАЯ ТАМАРА ИВАНОВНА
МПК / Метки
МПК: G05B 11/01
Метки: положения
Опубликовано: 15.02.1993
Код ссылки
<a href="https://patents.su/5-1795416-sistema-regulirovaniya-polozheniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования положения</a>
Датчик угловой скорости с дискретным выходом

Номер патента: 529420
Опубликовано: 25.09.1976
Авторы: Буканов, Иванов, Кадышев, Муратов, Прохоров
МПК: G01P 9/02
Метки: выходом, датчик, дискретным, скорости, угловой
...1,1 , - а 12 через диод 13 и трзнзистаа - падки,слс к источнику переменного така 5. Упрзс,1зистора 14 саегп 1 нен с Выхадак 1 г,го усилителя 16, выхсд катас 010 ключен к датчику така 11 и истачен:ку апср 11 аганапряжения (на чертсже нс 1 таказзн 1. Час 101" у з.1 авравна частоте истач:-пека 15.праВляющие ВхОды ГвеадОВ 6 - 9 сае;В 11 ге 101529420 1 НИИПИ Заказ 5346/112 ираж 1029 одписн ПП "Патент". г. Ужгород, ул. Проектная Фил выходом усилителя 4, который также связан систочником 15.Датчик работает следующим образом,При действии угловой скорости на гироузел 1сигнал с датчика угла 2 поступает на усилитель 4,где преобразуется в постоянное напряжение, величина и знак котсрого определяются величиной ифазой сигнала с датчика 2, Это...
Регулятор скорости перемещения плунжера гидравлических прессоов

Номер патента: 607197
Опубликовано: 15.05.1978
Авторы: Альтерман, Гутников, Матюнин, Мельников
МПК: G05D 13/62
Метки: гидравлических, перемещения, плунжера, прессоов, регулятор, скорости
...скорости содержит датчик скорости 1, механически связанный с прессштемиелем пресса, задатчик скорости 2, блок сравнения 3, два входа которого соединены с датчиком скорости 1.и задатчиком скорости 2, генератор 4 командных импульсов, вход которого соединен с выходом блока сравнения 3, один выход соединен со входом запуска генератора 5 импульса паузы, а второй - с одним из . входов выходного преобразователи 6, выход которого соединен со входом привода 7 регулирующего дросселя 8; выход генератора 5 импульса паузы соединен с одним из блокирующих входов генератора 4 командных импульсов блок 9 индикации знака рассогласования, блок 10 моделирования люфта регулирующего дросселя, причем вход блока 9 соединен с выходом блока сравнения...
Регулятор угловой скорости колес транспортной машины

Номер патента: 864257
Опубликовано: 15.09.1981
МПК: G05D 13/00
Метки: колес, регулятор, скорости, транспортной, угловой
...фиг,2 - схема блокадифференцирозания,30. Устройство содержит колеса 1 тран.спортной машины, датчики 2 угловыхскоростей колес, блок 3 сравненияугловых скоростей колес, блок 4 дифференцирования, электромагнитный клапан 5, насос 6 и узел регулированияподачи топлива в двигатель, состоящий из исполнительного цилиндра 7,шток 8 которого соединительной планкой 9 связан с рейкой 10 топливногонасоса 11 двигателя транспортной машины. Рейка 1 О посредством пружины12 и ползуна 13 связана с рукояткой14 управления подачи топлива в двигатель.Пружина 15 постоянно прижимаетрейку 10 к пружине 12. Блок 4 дифференцирования выполнен по схемепростейшего устройства и состоит натрансформаторе 16, поляризованногореле 17, силового реле 18, источников 19 и 20...
Регулятор скорости электропривода

Номер патента: 957396
Опубликовано: 07.09.1982
Авторы: Корниенко, Соколовский, Тув, Хархалис
МПК: H02P 5/06
Метки: регулятор, скорости, электропривода
...связи по скорости, с выхода узла сравнения 1 поступает на пропорциональный б и интегральный 3 регуляторы.Полученные таким образом сигналы управления 0 и ЦЗ поступают на вход преобразователя 7 и на входы блоков 8 и 9 соответственно. Уравнение якорной цепи вентильного электропривода постоянного тока по средним значениям за 1"й интервал вентильности имеет следующий вид:О .-3 я 5с) сединс)ст 9Здин ас., - )с 1 Д3где 1 - среднее значение динамического тока на -м интервалевентильности;среднее значение статическоьсгго тока на 1-и интервалевентильности;9573 или И, - среднее значение напряженияапреобразователя на -м интервале вентильности;Г, - среднее значение ЭДС двигаателя на 1-м интервале вен- Ютильности.Сигналу 01 соответствует в общем...
Электропривод с адаптивным регулятором скорости

Номер патента: 1541749
Опубликовано: 07.02.1990
Авторы: Григорьева, Делятицкая, Каминская, Мартиросянц, Шевырталова
МПК: H02P 5/06
Метки: адаптивным, регулятором, скорости, электропривод
...сигналом задания регулятору 6 тока на участке разгона.Требуемая интенсивность разгона обеспечивается с помощью потенциометра 22 блока 12 (фиг.2). Одновременно с переходом триггера в состояние логической "1" появляется напряжение на его Ч-входе, т.е. снимается эап рет на работу триггера по Т-входу.Блок 15 запаздывания введен для того, чтобы исключить влияние формирователя коротких импульсов на состояние ТЧ-триггера 1 в начале пере ходного процесса, обусловленного изменением сигнала задания скорости,С этой целью время задержки блока 15 выбирается несколько большим, чем длительность короткого импульса 30 формирователя 14.В рассматриваемом режиме при набросе положительного сигнала задания скорости, на выходе формирователя 14 появляется...
Предыдущий патент: Устройство синтеза испытательного сигнала измерителей фазочастотных характеристик
Следующий патент: Экстремальный пневматический регулятор
Случайный патент: Картер для дизельного двигателя внутреннего сгорания