Архив за 1989 год
Абразивный инструмент

Номер патента: 1495103
Опубликовано: 23.07.1989
МПК: B24D 13/14
Метки: абразивный, инструмент
...кромок неперетачиваемых пластин происходит следующим образом (фиг. 3). 30На столе 4 на определенном рас"стоянии одна от другой устанавливают МНП 5 - 7, которые совершают планетарные движения со скоростью 7.Абразивный инструмент, имеющий рабочую скорость 7 Р, вводится в соприкосновение с МЙП, и его сферические рабочие шарики 3,покрытые абразивом, обкатываются по острым кромкам МНП, 40На схеме показаны деформации эластичных сферических абразивных шариков 3 инструмента: сбегает с острых,сромок пластин 5, находится подутастиной 6 и набегает на острые 45;ромки пластины 7. При их относительом перемещении абразивная поверхость шариков снимает острые кромки11 НП до радиуса р,Изменяя эластичность шариков, ха 50рактеристнки абразивного слоя,...
Прерывистый шлифовальный круг

Номер патента: 1495104
Опубликовано: 23.07.1989
Авторы: Ардашников, Меркулова, Никулкин, Рожавин, Урецкая, Хегай, Черкудинов, Эфрос
МПК: B24D 17/00
Метки: круг, прерывистый, шлифовальный
...клинового выступа 2 выполнены дополнительные канав"ки, расположенные перпендикулярноплоскости вращения круга, которыеобразуют режущие элементы переменной протяженности, возрастающей погеометрической прогрессии от середины к вершине забойной части клинового выступа в окружном направлении.Форма режущих выступов и их расположение относительно плоскости вращениякруга выполнено аналогочно кругупрямого профиля (фиг. 2 и 3), Конусный прерывистый шлифовальный круг(фиг. 4) обеспечивает переменную вдиапазоне 5-8 м/с скорость резанияпо ширине Н рабочей поверхности, засчет чего стабилизируются динамические характеристики силы резания ирасширяется область устойчивости процесса шлифования эластичных материалов, и может быть использован...
Способ изготовления отрезного круга

Номер патента: 1495105
Опубликовано: 23.07.1989
Авторы: Ковшов, Толкачев, Черников
МПК: B24D 17/00
...алмаэоносное покрытие. 2 ил. стия 4 полученного корпуса наносят алмазное покрытие 5.Для приведения круга в рабочее состояние его натягивают на специальный патрон, создавая растяжения от центра к периферии по радиальным направлениям, Корпус, состоящий из двух дисков, сложенных поперек направлениями прокатки, исключает проявление аниэотропии упругих свойств металлопроката каждого из дисков в отдельности при его натяжении и те самым сохраняет геометрически правильную круглую форму отверстия. Сохранение формы отверстия уменьшае 1ударный характер взаимодействия режущей кромки с разрезаемым материалом, что увеличивает стойкость кругов, повышает выход годных пластин вследствие уменьшен ботки режущей кромк резания, улучшает г емых пластин...
Клеевая композиция для склейки шлифовальных лент

Номер патента: 1495106
Опубликовано: 23.07.1989
Авторы: Корчмар, Куликов, Табаровский, Толчинский, Шоссель
МПК: B24D 18/00
Метки: клеевая, композиция, лент, склейки, шлифовальных
...и повышают эластичность клеевого шва.Композицию готовят следующим оКлеевая кожозицня для склейкиалифовальных лент, содержащая раствор уретанового каучука УКи полииэоцианата, о т л и ч а ю щ а я с я тем, цто, с целью повышения элас тичности клеевого щва, она дополнительно содерзсит порошок поаивщщилового спирта в количестве 0,5"1,5 мас.Х от массысухого остатка клея. врывав Сопро- Стойкость деизм до тнвле- мнв, при 7, и/е ииерассяаивающеклеевого щва,Сопро- тивлеикеразрыву образца ленты, Н/50 см одержа" вие по- ивииилоого спнр а в клеенас.2 Бе добавки (иэвест лей) 0,400,501,50 750 15,0 65,0 40,0 21,0 1850 14,8 68,0 44,0 37,0 775 20,0 85,0 66,0 47,5 1650 24,7 85,0 67,6 54,0 1750 26,0 87,0 72,6 62,0 1650 13,0 45,0 34,6 22,0...
Устройство для изготовления абразивного инструмента

Номер патента: 1495107
Опубликовано: 23.07.1989
Авторы: Бирюков, Буюкли, Попова
МПК: B24D 18/00
Метки: абразивного, инструмента
...клея устройство снабжено нагревателем 14.Устройство работает следующим образом. 20Изделие 3 и ванну 1 приводят в синхронное движение. При этом ролик 4 смачивает периферийную поверхность иэделия клеем, Смоченная клеем поверхность изделия входит в контакт 25 с поверхностным слоем ферромагнитной жидкости 2, помещенной в ванну. Во взаимодействие с клеем ферромагнитная жидкость не вступает. Иэ бункера 13 в ванну поступают зерна абразива, 30 которые имеют большую плотность и тонут в ней. При вращении ванны, часть ее (после прохождения бункера) попадает в зону магнитного поля магнита 12. Плотность ферромагнитной жидкости возрастает и зерна начинают перемещаться к поверхности ванны, где интенсивность магнитного поля меньше. Входя в контакт...
Устройство для выпрессовки втулок

Номер патента: 1495108
Опубликовано: 23.07.1989
Автор: Кабиров
МПК: B25B 27/02
Метки: втулок, выпрессовки
...относительно зах. Последние подпружинены в ьном направлении кольцевой пру10, а на конусе 6 установлены ичители 11,л улярном оси втулки, На фиг, 1 изображено уст й вид; на фиг, 2 - сече иг 1; на фиг, 3 - элек Устройство для выпрессов ойствоие А-А тов общи на ф радиал1жиной о и и втулок и 2, трай гидроогр содержит корпус 1 с захватаверсу 3 и закрепленный на нцилиндр 4, шток 5 которотоматически связан с захватамимощью конуса 6. Устройствозакрепленными на корпусеназначенными для взаимоде тройство ает следующим обазом 2 с понабжено Траверса 3 устанавливается на корпусную деталь 12. Включается гидротилиндр 4, и шток 5 с закрепленным 1 и предйствия с ПРИКА рно ,Г, 21, ате ти к приспособлери выпрессовки метра.- повышение просчет снижения...
Манипулятор

Номер патента: 1495109
Опубликовано: 23.07.1989
Автор: Черняков
МПК: B25J 9/00
Метки: манипулятор
...жестко закреплен и намотан набарабане 4, а другой через блок 7соединен с регулируемой тягой 8,связанной с торцом направляющейштанги 2. Регулируемый упор 9 служитдля ограничения свободного хода гибкого элемента, а винт 10 - для регулирования исходного положения поворотного фланца 3. Ман;:аулятор работает следующим образомПоворотный фланец 3, служащий для крепления исполнительных органов (механизмгв) манипулятора (схват, рука и т.п), совместно со штоком привода .силового цилиндра) 1 гибким элементом 6 совершает прямолинейное перемещение до соприкосновения регулируемой тяги 8 с регулируемым упором 9, положение которого определяет начало вращения фланца 3.В результате взаимодействия регулируемой тяги 8 с регулируемым 30 35 40 45 50...
Устройство для шагового перемещения

Номер патента: 1495110
Опубликовано: 23.07.1989
Автор: Флейтман
МПК: B25J 9/00
Метки: перемещения, шагового
...перемещения, содержащее привод с червячнойпередачей, вибратор для создания крутильных колебаний, установленный наопоре, и платформу, расположеннуюв направляющих, о т л и ч а ю щ ее с я тем, что, с целью увеличенияКПД, колесо червячной передачи связано с вибратором крутильных колебаний,а двигатель привода и связанный сего валом червяк установлены на плат"форме,йдА Фиг.2 Составитель Ф, МайоровТехред М,Дидык Корректор А,Обручар Редактор В, Петраш Заказ 4163/12 Тираж 778 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5 Проиэводстленно-издательский комбинат "Патент", г.Ужгород, ул. Гагарина, 101 Изобретение относится к машиностроению, а именно к...
Lкоординатный манипулятор

Номер патента: 1495111
Опубликовано: 23.07.1989
Авторы: Григорьев, Ивашов, Колискор, Некрасов, Степанчиков
МПК: B25J 11/00, B25J 9/00
Метки: lкоординатный, манипулятор
...элементом 9.На фланце установлено исполнительноеустройство 14,В качестве принодных элементов3 - 8 линейного перемещения можноцсполь- цать пненмоцилиндры или винтовые п редачи с электродвигателями,Конкретное исполнение приводных элементов , - 8 на фиг, 1 не показано.С це.ью обеспечения высокотемпературного прогрева (при установкен сверхнысоковакуумном оборудовании)флацец 2 манипулятора с элементами3 - 8 может отсоединяться от основания манипулятора (фиг. 3).Манипулятор работает следующимобразом.При цзмецсцци длин приводных элементов 3 - Я линейного перемещенияисполнительное устройство на фланцесоцершает днцжецце по шести координатам - тром линейным и трем угловым относительно неподвижного основацця 1, с ф.цронаццая трубя 10...
Устройство для контроля геометрических параметров манипулятора

Номер патента: 1495112
Опубликовано: 23.07.1989
Авторы: Болотин, Гордиенко, Зиндер, Табачник, Федосеенков
МПК: B25J 11/00, B25J 19/00
Метки: геометрических, манипулятора, параметров
...шарнирами звенья 2 - 4 (оси 20шарнирон параллельны),а также фланец 5, содержит основание б с базовой поверхностью 7 для установкиманипулятора 1 и измерительный элемент, выполненный в виде прямолинейной направляющей 8, установленной наповерхности 7, и калиброванной скобы 9, установленной на фланце 5 конечного звена манипулятора,Манипулятор 1 установлен на базоной поверхности 7 основания 6так, что оси шарнирон перпендикулярны продольным осям прямолинейной направляющей 8 и скобы 9,Контроль геометрических параметрон манипулятора, н частности величины смещения оси конечного звена с фланцем 5 относительно оси первого звена 2, осуществляется следующим образом. 40На Сазовой поверхности 7 основали 6 закрепляют манипулятор 1, Выводят...
Манипулятор

Номер патента: 1495113
Опубликовано: 23.07.1989
Автор: Литвиненко
МПК: B25J 11/00
Метки: манипулятор
...3 - привод, разрез; на Фиг. 4 - вид Б на фиг. 3,Манипулятор содержит корпус 1 прямоугольной формы, крепежные петли 2, приводы 3, в зазоре неподвижных частей которых располагаются подвижные части, например Ферромагнитные 20 пластины 4. При этом пластины 4 с по мощью тросов 5 и петель 2 крепятся к руке Ь, которая через тросы 5 и пластины 4 подвешена на пружинах 7, Рука 6 имеет укрепленный на одном 25 конце привод 8 схвата 9 с губками 10, установленный на другом конце этой руки. Схват соединен с приводом тягой, которая проходит внутри ру" ки 6. Корпус манипулятор укреплен на 30 основании 11, Неподвижные части приводов 3 содержат две пары полюсов 12, расположенных один напротив другого, на которых установлены катушки 13. Пластины 4...
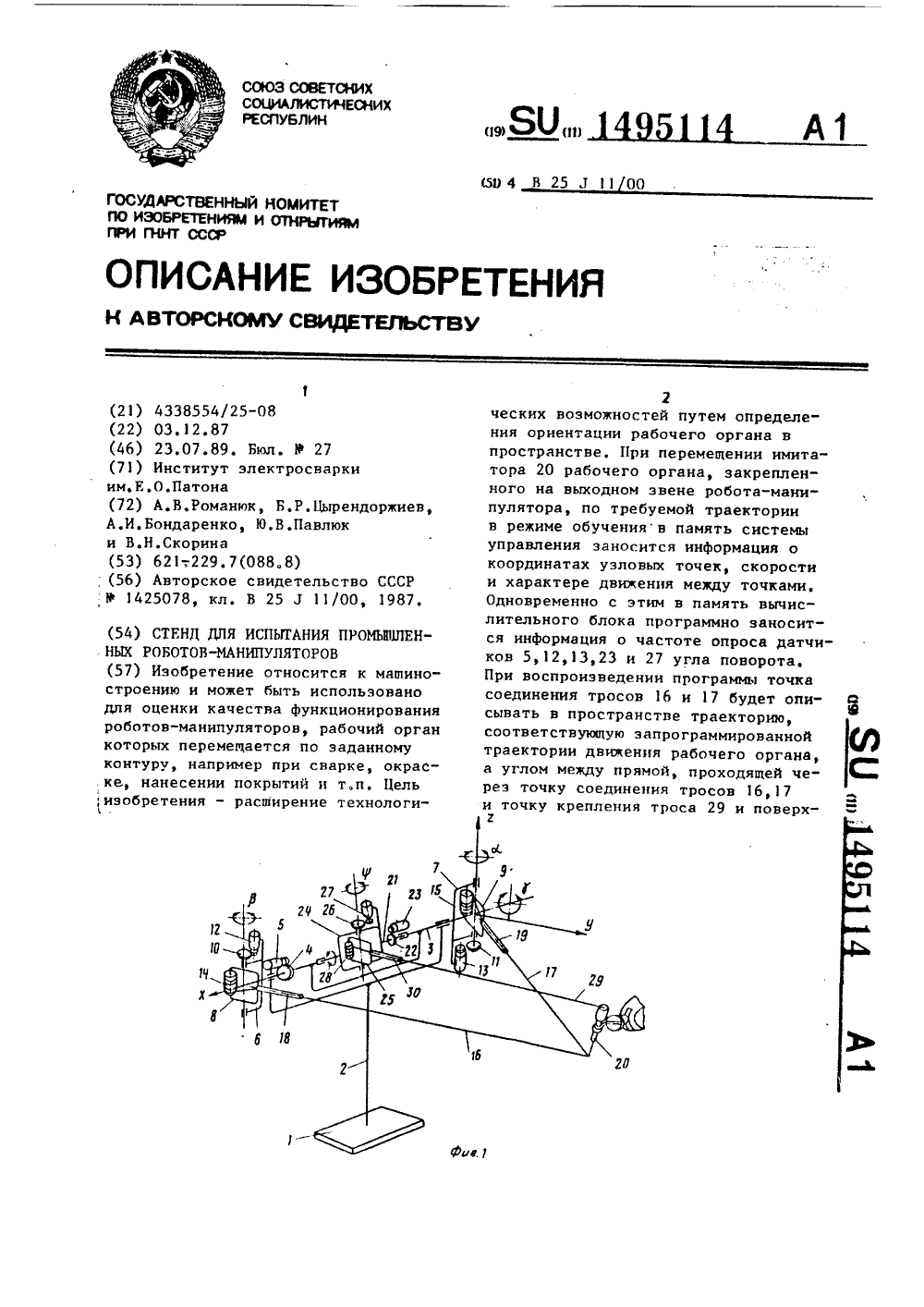
Стенд для испытания промышленных роботов-манипуляторов
Номер патента: 1495114
Опубликовано: 23.07.1989
Авторы: Бондаренко, Павлюк, Романюк, Скорина, Цырендоржиев
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
...относительно запрограммированной траектории, Подпружиненные барабаны 14 и 15, соединенные с 40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечиваяразмотку или намотку тросов 16, 17и 29.45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечиваласьсоосность тросов 16,17 и 29 и направляющих 18,19 и 30, На входе и выходе направляющих 18,19 и 30 уста,новлены рамки для улучшения условийпрохождения тросов по направляющим,обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27. Одновременно с поворотом рамок 8,9 и 25через мультипликаторы 10, 11 и 26вращаются датчики 12,13 и 27, показания которых, соответствующие угламЫиповорота тросов 16,17...
Транспортный робот

Номер патента: 1495115
Опубликовано: 23.07.1989
Автор: Гвоздев
МПК: B25J 11/00, B25J 5/02
Метки: робот, транспортный
...10 робот, вид сверху; на фиг. 2 - разрез А-А на фиг. 1.Транспортный робот содержит две аналогичные продольные балки 1, на которых закреплены по два индивиду альных привода 2. На выходных валах приводов 2 закреплены опорные колеса 3. Робот перемещается по направляющим рельсам 4. К каждой продольной балке 1 крепится зубчатая рейка 20 5, а между рейками 5 расположено кинематически связанное с ними зубчатое колесо 6 суммирующего зубчато-реечного механизма. Рейки 5, балки 1 и планки 7 обеспечивают при заторможен ных приводах 2 геометрическую неизменяемость конструкции, К зубчатому колесу 6 крепится основание манипуляционного механизма 8 с захватом 9.Транспортный робот работает сле дующим образом,Если угловые скорости всех приводов 2...
Устройство для управления приводом робота

Номер патента: 1495116
Опубликовано: 23.07.1989
Автор: Исаков
МПК: B25J 13/00, G05B 11/00
...отработки устройствомзаданного значения тока уменьшаетсясигнал рассогласования 11, увеличивается значение выходной координатыБ и сигнал 11 на выходе сумматора 9изменяет свой знак. Изменение знакаприводит к изменению знака выходного напряжения компаратора 10, ивыходной сигнал корректирующего бло"ка 11 начинает плавно уменьшаться,уменьшая тем самым интегральную составляющую сигнала управления электродвигателем.При дальнейшей отработке заданного значения изменяется знак интегральной составляющей, что приводит куменьшению значения сигнала управления электродвигателем по мере приближения выходной координаты к заданному значению, в результате чего повышается динамическая точность устройства.В установившемся режиме работы вустройстве...
Устройство для управления сборочным манипулятором

Номер патента: 1495117
Опубликовано: 23.07.1989
МПК: B25J 13/00
Метки: манипулятором, сборочным
...звено,7 4то на ныходе первого интегратора 14также устанавливается нулевой сигнал, поэтому сигнал на третий входвторого сумматора 4 не подается ипривод 7 останавливается, При этомна выходе интегратора 15 сигналкоррекции, соответствующий новомуположению исполнительного органа 9,сохраняется,Устройство позволяет удерживатькорректирующий сигнал положения навыходе интегратора 15 при отсутствии сигнала (или меньше величинысигнала задания по усилию) с дат"чика 12 усилия в отличие от известного устройства, н котором сигналкоррекции положения пропадает приотсутствии сигнала с датчика 12 усилия, что вызывает рынки исполнительГного органа 9, Кроме того, интеграторы 14 и 15 устройства выполняютсглаживающие функции, повышая динамические...
Схват манипулятора

Номер патента: 1495118
Опубликовано: 23.07.1989
Авторы: Джолдасбеков, Кайнарбеков, Слуцкий
МПК: B25J 15/00
Метки: манипулятора, схват
...сферических пар 7 с пружинами 8. Базисные звенья с помощью подпружиненных поводков 9 и 10 шарнирно соединенных с одним иэ захватных рычагов. Причем шарниры 11, 35 соединяющие поводки и захватный рычаг, снабжены тормозными устройствами 12, выполненными в виде электромагнитных муфт, Оси шарниров 11 на противоположных рычагах 1 и 2 смещены 40 одна относительно другой на некоторое расстояние 3 . Жесткость пружин 13, связывающих захватные рычаги с поводками базовых звеньев, расположенных ближе к периферии рычагов, больше 45 жесткости пружин, размещенных ближе к центру. Губки смонтированы на рычагах одна параллельно другой, при этом между губками, размещенными на одном рычаге, предусмотрены зазоры, обеспе 50 чивающие при захвате...
Захватное устройство

Номер патента: 1495119
Опубликовано: 23.07.1989
Автор: Панов
МПК: B25J 15/00
Метки: захватное
...входит в вотверстие иэделия. Захватные рычаги 3 в это время сжаты (сжимают пружину 4). При соприкосновении упорной втулки 7 с иэдели.ем 16 элементы, связанные с ней - ось 8 с шайбой 9, кулачок 14 и рычаги 3,останавливаются. Продолжающий двигаться вниз корпус 1 своим клиновым упором 2 давит на ролики 6 и, раздвигая двуплечие рычаги 3, сжимает пружину 4.При взаимодействии выступа кулачка 14 с упором 12 паза 11 корпуса (фиг.4, положение 11) корпус останавливается. После этого корпус движется в обратном направлении, а втулка 7 с осью 8, шайбой 9, кулачком 14 и рычагами 3 остается на изделии. Когда кулачок 14, взаимодействуя с упором 13, занимает положение 111 (фиг.5), клиновый упор 2 корпуса 1 прекращает оказывать давление на ролики 6, и под...
Захватное устройство “новокомак-б

Номер патента: 1495120
Опубликовано: 23.07.1989
Авторы: Бац, Коренев, Новоселов
МПК: B25J 15/00
Метки: захватное, новокомак-б
...перемещения. Толкатель 8 через ребра 9 подпружинен пружиной 12 и шарнирно соединен с губками 2. В патрубках 7 размещены с воэможностью перемещения вдоль них грузы 13, связанные с толкателем 8 через гибкие элементы, например гибкие элементы 14, 45 и ребра 9. На внутренней поверхности полого вала 4, в местах его сообцения с патрубками 7, установлены блоки 15 для гибких элементов 14. Ребра 9 же - стко соединены с наружным кольцом подшипника 10, а толкатель 8 - с внутренним кольцом подшипника 10.Устройство работает следующим образом.Двигатель 5 приводит во вращение через тормозную муфту 6 полый вал 4 с патрубками 7, которые передают вращение грузам 13. Под действием центробежных сил грузы 13 перемещаются от оси полого вала 4 к...
Сборочно-захватное устройство

Номер патента: 1495121
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: сборочно-захватное
...до крайнего нижнего положения, ползуны 4 сжимают пружины 9, 1 О и 12, фиксаторы 11 фиксируют пружины 10 в сжатом положении. Захва - тывание детали происходит при перемещении поршня 18 вверх, усилие эахватывания создают три пружины 9 и общая пружина 12. Если в первоначальный момент сборки ввиду смещения между собираемыми деталями возникает контакт по фаскам, то возникающие контактные усилия между фасками собираемых деталей передаются губками 2 через систему рычагов к ползунам 4. В зависимости от направления контактного усилия соответствующий ползун 4 (или два ползуна) перемещается вниз, а остальныв полэуны 4 - вверх, т,е., деталь перемещается по направлению контакт - ного усилия. Перемещение детали начинает происходить при определенном...
Захватное устройство

Номер патента: 1495122
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захватное
...цилиндра 3 от перемещения вдоль оси штоков, Ползун 6, шарнирно соединенный с концами тяг 7, движется в направляющей 4 в сторону, противоположную движению полэуца 5, а тяги 7 поворачиваются относительно оси соединения двуплечих рычагов 2 с тягами 7,компенсируя разность сил трения ншарнирах и штоках силового цилиндра3, тем салым достигается симметричноеразмыкание зджимных губок.Захват детали происходит в следующем порядке. Открытые эажимные губкиподводят к детали, в бесштоковую полость силового цилиндра 3 подают сжатый гоздух. Сжатая пружина 8 и штокисилового цилиндра 3, воздействуя наднуплечие рычаги 2, сжимают последние. Полэун 5 и ползун 6 со связаннымс ним подвижным элементом 10 движутсян направляющей 4 нанстречу друг другу, а...
Захватное устройство

Номер патента: 1495123
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захватное
...тягами переменнойдлины и звеньями, имеющими длину,равную длине коромысла, о т л и -ч а ю щ е е с я тем, что, с цельюупрощения конструкции, расширениятехнологических воэможностей путемувеличения номенклатуры эахватываеьых деталей и повышения надежностизахвата, оно снабжено кулисами, шарнирно установленными на оси коромысла, и ползунами, размещенными на кулисах, при этом зажимные губки .закреплены на ползунах,Составитель Б,ПышкинРедактор В 1 етраш Техред М.Дидык Корректор Л.Патай Заказ 4164/3 Тираж 778 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,101 3 14951Изобретение относится к...
Захват для деталей с отверстием

Номер патента: 1495124
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захват, отверстием
...4 от носительно основания 1. На центральную часть корпуса 4 установлен стакан 19, подпружиненный пружиной 9. Деталь 20 установлена на ложементе 21. На позиции разгрузки - стержень 22, 20Захват работает следующим образом.Исполнительный механизм манипулятора опускает руку 2 с захватом к ложементу 21, на котором установлена деталь 20. В этот момент упор 10 на ходится под действием пружины 9 в нижнем положении, упираясь ограничителем 11 в нижний бурт корпуса 4, губки 13 пружинами 14 сжаты, шток 6 зафиксирован на корпусе 4 шариками 30 16, корпус 4, в свою очередь, находится в нижнем положении, гайкой 12 опираясь на верхнюю поверхность основанияПри движении вниз упор 10 нижним торцом соприкасается с деталью 20, а исполнительный механизм...
Рука манипулятора

Номер патента: 1495125
Опубликовано: 23.07.1989
Авторы: Ким, Флеклер, Царевский
МПК: B25J 1/02, B25J 18/00
Метки: манипулятора, рука
...соосно друг н друге ) с.разнымнаправлением нанинки. Свободные концыпружин 2 и Ъ закреплены на фланце, 25 Ънапример стакане 4, к которому крепится схнат 5. Привод осевого перемещения содержит, например, двигатель 6вращения, на оси которого закрепленбарабан 7, на котором намотана гибкая тяга 8, соединенная через блок 9со стаканом 4 и размещенная по осируки манипулятора, т.е. спиральных пружин 2 и 3.Рука манипУлятора работает следующим образом,В исходном положении рука манипулятора находится н сложенном положении. Для выднижения руки манипулятора в осевом направлении включается 40двигатель 6, при этом гибкая тяга 8разматывается с барабана 7 и под действием упругих свойств спиральных(рулонных) пружин 2 и Э схнат 5 вмес - 3 5 4те со стаканом...
Устройство для обеспечения безопасности работы оператора

Номер патента: 1495126
Опубликовано: 23.07.1989
Авторы: Андрусенко, Байкалов, Доброванов, Сокирко, Череповский
МПК: B25J 19/06
Метки: безопасности, обеспечения, оператора, работы
...эластичных трубок 3 и далее через выходные 6 отверстия - на вход элемента 7 блоки ровки и элемента 8 сигнализации.Установившийся максимальггый уровень расхода потока воздуха при этом соответствует отсутствию сигнала элемента 7 блокировки и элемента 8 сигнализации. При воздействии оператора на пластины 2 настила 1 они прогибаются и своей ребристой поверхностью деформируют эластичные трубки 3, при этом ребра имеют поперечное направление относительно трубок 3, а расстояние между последними не превышает минимального размера следа стопы оператора. Площадь поперечного сечения эластичных трубок 3 уменьшается, вчастном случае, до нуля. Расход воз"духа от источника 5 сжатого воздухапрекращается, это приводит к регламентированному уменьшению...
Схват промышленного робота

Номер патента: 1495127
Опубликовано: 23.07.1989
Авторы: Ефремов, Медведев, Ротт, Чайкин
МПК: B25J 15/00
Метки: промышленного, робота, схват
...в предпоследием звене, внутри трубки пропущен тросик 4, закрепленный одним концом в последнем конечном звене 5, а дру гим концом связанный с приводом 6. Для образования буртика В, которыми связаны звенья, вовнутрь трубки 3 вводится кольцо 7, а для буртика, которым соединяется трубка с корпусом, 5 О вводится разрезное кольцо 8,Устройство работает следующим образом.Схват вводится н отверстие детали сверху, тросик 4 в этот момент ослаб лен, звенья 2 пальцев свободно свисаютпричем между звеньями пальцев есть промежутки, допускающие относительную свободу звеньям, которая обеспечивается трубками 3 с буртиками В, на которых и повисают звенья пальцев уступами отверстий. Затем включается привод 6, конечное звено каждого пальца поднимается и...
Устройство для очистки от стружки глухих отверстий

Номер патента: 1495128
Опубликовано: 23.07.1989
Авторы: Георгиевская, Кустов
МПК: B23Q 11/02
Метки: глухих, отверстий, стружки
...сопло 7 исвязанный с ним через упругий элемент11 корпус 5 по направляющей 3. Уплотнение 10 упирается в деталь 12 и сопло 7 продолжает передвигаться при остановленном корпусе 5. При перемещении сопла на расстояние 1, выходнаячасть 9 сопла 5 попадает в очицаемоеотверстие и каналы 6 и 8 соединятсямежду собой, СОЖ через каналы 6 и 8попадает в отверстие и очищает его. разом.После окончания обработки отверстия в детали 12 включают механизм 4 возвратно-поступательного перемещения, который перемещает сопло 7 и че-, рез упругий элемент 1 - корпус 5 на величину 1. При перемещении на расстояние 1 корпуса 5 последний останавливается, когда уплотнение упрется в деталь 2. Далее механизм 4, преодолевая сопротивление упругого элемента 1, перемещает...
Бетоноукладчик установок для формования тел вращения

Номер патента: 1495129
Опубликовано: 23.07.1989
МПК: B28B 21/34
Метки: бетоноукладчик, вращения, тел, установок, формования
...самоходной каретке 8,Устройство работает следующим образом,Собранную форму 1 устанавливаютна привод 4 центробежного станка. Отсеки 6 и 7 бункера 5 заполняют необходимыми формовочными смесями, напри мер тяжелым и легким бетонами, Перемещением каретки 8 бетоноукладчикатрубчатые корпуса 10 и 11 вводят вполость формы 1. Включают приводы 4 и18 центрифуги и трубчатого корпуса 1 О 15с закрепленным на ней шнеком 12 и по-дают формовочную смесь из отсека 6бункера 5 по полости цилиндрическогокожуха 14 в форму 1. Перемещением каретки 8 бетоноукладчик откатывают отформы 1,чем обеспечивают формованиепервого внешнего слоя изделия.1 Как только свободный конец трубчатого корпуса 10 оказывается в полости формы 1, включают привод 19 шнека 13,...
Способ расщепления слюды

Номер патента: 1495130
Опубликовано: 23.07.1989
Авторы: Барсуков, Гаврилов, Новгородская, Родионова, Соболев, Трошина
МПК: B28D 1/32
Метки: расщепления, слюды
...к расщеплению.П р и м е р. Были взяты три навески полуочищенных подборов Ковдорского фпогопита размеров 10, 15, 20 по 100 г каждая. Каждая навеска быпа выдержана в водно-меловой суспенэии концентрации 0,5 Х в течение 5 мин, после чего каждая навеска была обработана по . своей технологии.Первая навеска каждого иэ размеров помещалась в установку (режим обработки: частота 13,56 МГц, время обработки 2 мин, высота между электродами и контейнером 18 мм), вспученная слюда тем же конвейером подавалась в 0,5 л емкости с тем же водно-меловым раствором, выдерживалась там около суток, а затем капибровалась (расщеплялась) струей воды под давлением 2 атм, подаваемой через впанг с насадкой.Вторые навески каждого иэ размеров подвергались обработке в...
Камнеобрабатывающее устройство

Номер патента: 1495131
Опубликовано: 23.07.1989
Авторы: Айзенберг, Богопольский, Коршенбойм, Мельник, Фридман
МПК: B28D 7/00
Метки: камнеобрабатывающее
...27.Устройство работает следующим образом.Секторы 12 и 13 и ролик 11 выставляются в исходное положение. Для этого при опущенных грузах 19 отпускаютконтргайки 27 дисков 17 и поворачивают секторы вместе с полуосями такимобразом, чтобы плита при подходе к 14ним не попадала на скос сектора, После этого контргайками закрепляют диски 17. Зазор между секторами и лентойтранспортера регулируется при помощискоб 15 и 16, Ролик 11 опускают так,чтобы лента транспортера при своемперемещении вращала его.Затем подаются плиты на транспортер.При подходе плиты к датчику плитаприподнимает секторы 12 и 13 и начинает их вращать. Чтобы не было перекоса плиты, секторы установлены симметрично относительно продольной осиконвейера,При своем вращении секторы...
Вулканизационный дорн

Номер патента: 1495132
Опубликовано: 23.07.1989
Авторы: Бекин, Веткин, Неплохов, Оборин, Хабаров
МПК: B29C 33/50, B29C 35/04
Метки: вулканизационный, дорн
...сборке вулканизационного дорна (фиг.1) он заполняется заполнителем (шарики 1 О, металлический сплав 9)30 Собранный вулканизационный дорн размещается в формующее устройство (условно не показано), где с помощью нагревателей 4 и одновременной подачи ,в полость Б направляющей 7 какого- либо теплоносителя металлический расплан 9 заполнителя переходит в жидкое состояние (плавится), При продольном перемещении (фиг.2) одного из дисков 1 или 2 по направляющей 7 нерастяжи мые гибкие элементы 11 начинают изгибаться, а поршень 6 с направляющей 7 перемещают внерх посредством принода (условно не показан). При этом заполнитель .из надпоршневой полости О 45 подпитывающей камеры передавлинается в полость эластичной диафрагмы 3,создавая тем самым в...