Архив за 1989 год
Манипулятор

Номер патента: 1491689
Опубликовано: 07.07.1989
Авторы: Казин, Мезин, Селиванов
МПК: B25J 9/00
Метки: манипулятор
...г у и смО ) иив эдлис;гес твии зубчатого кочесд 8 с.рейкои 7.Здгру:очная позиция 19 вылалиевав виде пненмоцилиндрд 21 с подвижнымштском-тсгскдтелем 22, обес.печивающимперемещение детди 18 вверх-вниздля гыводд ее из кассет шдгного тднспортнсгустройства (не показаны).,гнинуяср работает цикличес:ки по си ндл;и комдндодппардтд (не пакдздн). Цри этом приводы исполнительного органа обеспечивают перемещение схвдтд 5 в следующей последовательнасти: из исходного положения(Фиг, 5), затем плена (Фиг. 6), затемгправо (Фи . 4), затем снвд вниз(Фиг. 5), пассе чего вверх (фиг. 3),т.е. в исхдне положение,В паханном положении схват 5 расПала ается н крдинем правам положении ндд загрузочной позицией 19,зубчатое когесо 8 находится в зацеплении с рейкой 7,...
Модуль привода манипулятора

Номер патента: 1491690
Опубликовано: 07.07.1989
Авторы: Горуппа, Кашляк, Лабазов, Татаров, Щекин
МПК: B25J 9/00
Метки: манипулятора, модуль, привода
...во фланце 14 (фиг. 7), что обеспечивает замедление поршня 12 в конце хода. Далее поршень 12 упирается в соединительный фланец 4Б процессе перемещения поршень 12 перемещает своим упором 24 через регулируемый упор 21 промежуточной позиции рейку 19, которая поворачивает зубчатое колесо 2, вал 3 и соответственно руку 4 маципулятора по часовой стрелке в позицию 11 с плавным оста- новом, который является результатом замедления поршня 12 и рейки 19 в конце хода. При этом в результате новорота зубчатого колеса 2 происходит перемещение рейки 18. За счет наличия противодавления в цилиндре 5 не происходит дальнейшего перемещения рейки 18, которое может происходить вследствие инерции руки а следовательно, це происходит поворота руки...
Соединительный модуль руки промышленного робота

Номер патента: 1491691
Опубликовано: 07.07.1989
Авторы: Джолдасбеков, Кайнарбеков, Слуцкий
МПК: B25J 19/00, B25J 9/08
Метки: модуль, промышленного, робота, руки, соединительный
...комбинат "Патент", г.ужгород, ул. Гагарина,101 Изобретение относится к машино - строению и может быть использовано в конструкциях промышленных роботов.Цель изобретения - расширение функциональных возможностей робота.На фиг. 1 дана схема модуля; на фиг. 2 - схема поворотного элемента,Соединительный модуль содержит фланцы 1, выполненные в виде отдельных звеньев, которые жестко соединяются со схватом 2 и с последним звеном 3 механической руки. К фланцам 1 крепятся соединительные планки 4 с продольными пазами 5. Между планками 4 установлен поворотный элемент 6. Он выполнен тоже с продольными пазами 5. Соединительный модуль снабжен зажимами 7, установленными в пазах 5. Поворотный элемент 6 выполнен из вала 8 и втулки 9,...
Манипулятор

Номер патента: 1491692
Опубликовано: 07.07.1989
Авторы: Аугустайтис, Бансявичюс, Гинетис, Рибокене
МПК: B25J 9/08
Метки: манипулятор
...происходит посредством силовых гидроцилиндров 16 и 17 соответственно, связанных через распределительный клапан 18 с гидронасосом 19.Управление приводами манипулятора происходит с помощью блока 20 управления двигателем 5 и блока 21 формирования управляющих сигналов.Манипулятор работает следующим образом.От блока 21 подается управляющий сигнал ца распределяемый клапан 18 для включения в работу гидроцилиндра 16, который свои м штоком перемешает каретку по направляющей 2, при этом муфта 1 сцепляет вал датчика 10 с зубчатым колесом 12. Каретка, перемещаясь через зубчатую рейку 14, вращает зубчатое колесо 12, которое вращает вал датчика 10. Корпус датчика 10 вместе с частью 4 каретки удерживается от поворота двигателем 5, ротор которого...
Устройство для управления электроприводом робота

Номер патента: 1491693
Опубликовано: 07.07.1989
Авторы: Войтенко, Ганнель, Гудзенко, Николенко, Процерова, Смотров, Шпиглер
МПК: B25J 13/00, B25J 9/16, G05B 11/00 ...
Метки: робота, электроприводом
...динамические процессы управляемого звена 12 отличаются резонансными колебаниями, влияние которых ввиду большой редукции передачи или значительного демпфирования на динамические процессы двигателя 4 незначительно, что затрудняет восстановление вектора состояния при использовании сигнала ошибки наблюдения скорости двигателя, т. е. использование сигнала ошибки наблюдения скорости двигателя, поведение которой практически не зависит от поведения управляемого звена, не позволяет точно сформировать сигналы состояния и поэтому не обеспечивает точное управление звеном 12. Поэтому сигнал скорости двигателя (на выходе датчика 5) и сигнал на первом выходе блока 8, соответствующий наблюдаемой скорости двигателя, практически не отличаются один от...
Манипулятор

Номер патента: 1491694
Опубликовано: 07.07.1989
Авторы: Голованов, Орлов, Салтанов
МПК: B25J 11/00
Метки: манипулятор
...повторяется. 4 ил.149694воздуха в правую полость цилиндра 3. Шток выдвигается и поворачивает пневмоцилиндр 2 с исполнительным органом 20 (фиг, 4, движение 11). Регулируемый упор 15 воздействует на конечный выключатель 17.который дает сигнал ложементам 6 на зажим груза, если груз передается на станок или на воздухораспределитель 18, который подает воздух в верхнюю полость цилиндра 2. Его шток опускается и груз укладывается на ложементы другого транспортера (фиг. 4, движение 111). В случае подачи груза на станок сигнал на воздухораспределитель 18 подается после зажима детали на станке (фиг. 1). Регулируемый упор 10 воздействует на конечный выключатель2, который дает сигнал на воздухораспределитель 19. Воздухораспределитель9 подает...
Транспортно-ориентирующий манипулятор мухина

Номер патента: 1491695
Опубликовано: 07.07.1989
Автор: Мухин
МПК: B25J 11/00
Метки: манипулятор, мухина, транспортно-ориентирующий
...На втором конце вилки смонтирован привод 3, вал котороо связан с вилкой. Вал 14 привода 15 жестко соединен с вилкой в верхней ее части и образует, таким образом, шарнирное соединение этой вилки с тележкой 16, имеющей возможность перемещения по моно. рельсу 17. На раме выполнены отверстия8 с датчиками 19. На основании шарнирно установлен рычаг 20 с расположенными на нем конусными штырями 21 (ловителями) и зажимами 22, предназначенными для стыковки и фиксации рамы 1. Манипулятор работает следующим образом.Перед началом работы объект 2 закрепляется на раме 1. Установкой противовеса 6 добиваются расположения центра масс об ьекта на пересечении горизонтальных и вертикальной осей поворота выходного звена 5.Для обеспечения требуемой ориентации...
Привод рабочего органа манипулятора

Номер патента: 1491696
Опубликовано: 07.07.1989
Авторы: Барабадзе, Беклемышева, Веремеевич, Кашакашвили, Мачарадзе, Миленный, Назадзе, Полухин
МПК: B25J 11/00, F16H 35/00
Метки: манипулятора, органа, привод, рабочего
...с ней посредством резьбы поворотным барабаном 23. На внешней его стороне установлен зубчатый сектор 24, входяший н зацепление с зубчатым колесом 25 двигателя 26, закрепленного на корпусе 27 устройстна.Привод работает следующим образом.Мощность от мотора-редуктора 1 через ведущий нал 2 и центральное зубчатое образует резьбовую кинематическую пару со втулкой 22, расположенной между ним и траверсами на опорах 19 качения, и по ее резьбе смещается относите,пьно траверс 20. За счет этого смещения изменяются тормозные моменты на водиле 8 и колесе 11.5 ил. колесо 4 передается сателлитам Ь, от которых часть мощности передается на водило 8, а часть - через центральное зубчатое колесо 11 ведомому валу 12 привода.При неподвижном водиле 8 имеет...
Манипулятор

Номер патента: 1491697
Опубликовано: 07.07.1989
Автор: Куренков
МПК: B25J 11/00
Метки: манипулятор
...поршневого поворотного иневмодвигателя 7 на угол 180 Цилиндрические направляющие 5 за. прессованы в плите 8, закрепленной на корпусе пневмодвигателя 7, жестко связанного с основанием 1.Шатуны 3 шарнирно установлены одними концами на криеошипе 2, а другими на каретках 4. Разница их установки относительно нижней плоскости кривошипа 2 по высоте определяется цилиндрическими пальцами 9 - 12, высота которых увеличивается, например, в направлении против часовой стрелки.Высота данных пальцев возрастает соответственно на такую величину, которая исключает столкновение шатунов при пересечении их траекторий, с этой же целью на шатуне 13 предусмотрено Г 1-образное соединение 4.П-образное соединение 4 предназначено для того, чтобы ири повороте...
Уравновешенный манипулятор

Номер патента: 1491698
Опубликовано: 07.07.1989
МПК: B25J 11/00
Метки: манипулятор, уравновешенный
...которой равно К/(Кг), где К - радиус начальной окружности шестерни 11, г - радиус барабана.Манипулятор работает следующим образом.В крайнем верхнем положении колонны 2 пружина 7 имеет начальную деформацию уч ц развивает усилие Г= =Су, где С - жесткость пружины. Для полного уравновешивания руки робога в этом положении к колесу 11 необходимо приложить дополнительный момент, компецсируктщцй момент неуравновешенности. При смещении руки вниз на величину х деформация пружины возрастает на величину 1 у=х (К - г) /К, при этом момент неуравновешенности меняется. Его величина определяет условия равновесия для системы сил, представленных на фиг. 4 и 5, где Р - вес вертикально перемещающихся частей руки робота, Г - усилие пружины, 8 окружное...
Тактильный сенсор робота

Номер патента: 1491699
Опубликовано: 07.07.1989
Авторы: Антонов, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 15/00
Метки: робота, сенсор, тактильный
...сенсор робота содержит два слоя цилиндрических упругих баллонов 1 и 2, заполненных рабочей средой, Баллоны в каждом слое установлены параллельно друг к другу с касанием по боковой поверхности. При этом баллоны 2 нижнего слоя закреплены на очувствляемой рабочей поверхности 3 схвата робота, а оси баллонов 2 перпенликулярны осям баллонов 1 верхнего слоя, Торцы баллонов снабжены подвижными электрическими контактами 4, напротив которых установлены металлические пластины 5 и 6, образующие общую шину. Резисторы 7 и 8 образуют две группы, в которых резисторы соединены последовательно, причем выводы резисторов одной группы с)единены с соответствующими контактами 4 баллонов верхнего слоя, а выводы резисторов другой группы - с соответствующими...
Захват манипулятора

Номер патента: 1491700
Опубликовано: 07.07.1989
Автор: Лебедев
МПК: B25J 15/00
Метки: захват, манипулятора
...Концом штока 5 поршня 2 за палец 7 верхняя губка 6 вместе с упором 11 удерживается в поднятом цад нижней глкой 13 положении. Верхняя поисрхцость губки 13 расположена на одном уровне с матрицей 24 штампа. Ниж. цяя губка 13 с цолзуном 14 удержцвастся ц крайнем левом положении пружиной 7 через палец 16, упираюгцийся ц цаправляюцсхю основания 5.5 10 15 20 25 30 35 40 45 50 55 4При движении захвата справа налево верхняя губка 6 заходит в пространство между матрицей 24 и пуансонами 25, а нижняя губка 13, упершись в основание штампа, заходит в направляющие, при этом ползун 14 растягивает пружину 17.После окончания этого движения захвата следует сброс давления из штоковой полости 4 корпуса 1, после чего поршень 2 под действием пружины 3...
Многопозиционный захват промышленного робота

Номер патента: 1491701
Опубликовано: 07.07.1989
Авторы: Апатов, Васильевых, Вахрушев
МПК: B25J 15/00
Метки: захват, многопозиционный, промышленного, робота
...которого установлен якорь 8 электромагнита 9, установленный в губке 1 и подпружиненный пружиной 1 О. Губкакрепится через упругую прокладку 11 с помощью планки 12 к корпусу 13, жестко связаного с рукой робота. В полости корпуса расположен электромагнитный вибратор 4, фиксируемый крышкой 5, через отверстие которой проходит сердечник 16, связанный с губкой . Он подпружинен относительно корпуса пружиной 17. Губка 1 дополнительно снабжена направляющими втулками 18, взаимодействующими с фиксаторами, установленными в сборочной позиции (не показаны).Многопозиционный захват работает следующим образом.Для загрузки захвата он переносится промышленным роботом к загрузочному устройству и заполняется группой деталей. После чего к обмотке...
Вакуумный схват

Номер патента: 1491702
Опубликовано: 07.07.1989
МПК: B25J 15/06
...которой сообщается с внутренней полостью стакана 17. Для герметизации между движущимися деталями установлены уплотнительные кольца 20. Шпонки 21 предназначены лля пре. Лотвращения цроворачивания подвижных относительно корпусастакана 17 и золотника 4.Вакуумный схват работает следующим образом. Вакуумный схват, закрепленный на руке манипулятора, ориентируется относительно детали. В исходном положении зубья 11 расположены в пазах 9 вкладыша 6. Золотник 4 пол действием пружины 5 упирается во втулку 12, при этом его ка. палы 7 соединены цосрелством каналов 3 с атмосферой, причем каналы 7 соединены с полостью присоски 19. Стакан 17 под действием пружины 18 находится в отжатом от корпуса состоянии. При опускании руки манипулятора присоска 9...
Захват манипулятора

Номер патента: 1491703
Опубликовано: 07.07.1989
Авторы: Асаналиев, Рахматов, Усубаматов
МПК: B25J 15/06
Метки: захват, манипулятора
...на фиг. 2 - вид А на фиг. 1. Захват манипулятора содержит планку 1, соединенную с поджимной шайбой 2 посредством болтов 3. Поджимная шайба 2 фиксирует положение шаровой опоры 4 на корпусе 5. Корпус 5 жестко соединен с рукой манипулятора 6. В полости корпуса 5 расположена мембрана 7, соединенная с тягой 8. Тяга 8 крепится гайками 9 на планке 1. На корпусе 5 и поджимной шайбой 2 установлены уплотнения 10 и 11. На шаровой опоре 4 закреплена присоска 12 с несколькими рабочими полостями, что позволяет удерживать несколько деталей 13 в 15.Захват манипулятора работает следую(цим образом.Рукой манипулятора 6 присоску 12 ориентируют относительно захватываемых деталей 13 15. Далее захват опускают и присоска с помощью шаровой опоры 4 само-...
Способ надрезки материала

Номер патента: 1491704
Опубликовано: 07.07.1989
Автор: Рутман
МПК: B26D 3/08
Метки: надрезки
...использовано в машиностроении для надрезки материала с последующим разделением его на мерные заготовки.Цель изобретения улучшение качества получаемых изделий и повышение надежности.На фиг. 1 изображена схема внедрения клинового ножа в материал; на фиг. 2 -- разрез А - А на фиг. 1; на фиг. 3 узел 1 на фиг. 2.Направление движения клинового ножа 1 и надрезаемого изделия 2, например, кольца из подшипниковой стали, показано стрелками на фиг. . Ножс углом клина 3, перекатываясь по изделию 2, внедряется в материал. Радиус К перекатывания ножа 1 выбран из условия образования угла ч контакта, равного для плоской поверхности = 10,250,35) 1. Из фиг. 1 следуетя = агссов --й где К - радиус перекатывания; 15 - глубина надреза. Найденное соотношение...
Установка для групповой раскряжевки лесоматериалов

Номер патента: 1491705
Опубликовано: 07.07.1989
Авторы: Турлай, Федоренчик, Ходосовский
МПК: B27B 5/00
Метки: групповой, лесоматериалов, раскряжевки
...25 вводят в гнездо 26 платформы 5, благодаря цечу плоскость пильой цни 3 в происсенддвигдния располагается между скциячи транспортрд.11 рдвдритльно оторцованный (с выравнннычн н лии н икопи трцдчи), н;кт хльитов загр)ждкт крдноч нд горизонтальный транспортр 7 плдтфорчы 5. На тх 5 1 О 15 20 25 30 35 40 45 50 55 нологическом участке может применяться две-три платформы 5, которые поочередно блокируют с тележкой 1.Если требуется произвести отторцовку, оператор на глаз или при помощи концевого выключателя 23 (фиг. 1) устанавливает пакет кратковременным включением электродвигателей 19 и 20. Затем включают пильную цепь 3 и механизм 4 надвигания. В процессе пиления опилки и отторцовки падают через проем в платформе на транспортер 27. Для...
Механизм подачи бревен в деревообрабатывающий станок

Номер патента: 1491706
Опубликовано: 07.07.1989
Автор: Пономарев
МПК: B27B 25/04, B27B 31/00
Метки: бревен, деревообрабатывающий, механизм, подачи, станок
...пи звездочках. Одна из ни насажена нд дл, кинематически связанный с принс.сом 6о. мощью цепной передачи1 с перел;о - цым отношением, равным елини с Велцс;я звездочка 12 цепной передач.с 11 усдцо- лена на приволном валу 13 коцс йс рд а ведомая ее звезлочка 14 с г;цолегд под нижней - .олостой ветвьк нс псконтура 10 и введена с цсй в .яцепление.Рабочая ветвь цепного когура О ус- новлена на горизонтдльшй цд 1 двл якцс й 15 и является опорной поверхностью ллн захатов 4 олостой егви полего конт- ра 3. Сверх бревна 5 усднов,цы цри. жимные рслики 16.Механизм работает с,елкцс;мВключают в работ цриьчл 61 ного конейерд 2, ксгорый срези1491706 Фор,иула изобретения 10 иг ндл 13 и цепнук передачу 11 приводит в Одповремное вращение с одной и той же...
Режущий инструмент

Номер патента: 1491707
Опубликовано: 07.07.1989
Авторы: Белейчик, Белошицкий, Дробин, Пишник
МПК: B27B 33/08
Метки: инструмент, режущий
...инструмента, вид сбоку; на фиг. 2 - разрез А А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В - В на фиг. 3.Режущий инструмент состоит из оправки 1, прижимных шайб 2 и 3 кольца 4, в которое ввинчены упругие стержни 5 с зубьями 6, односторонне заточенных дисков 7 и 8 и гайки 9. На периферии дисков 7 и 8 выполнены зубья О, высота которых превышает максимально допустимую величину подачи на зуб. При сборке инструмента лиски 7 и 8 деформируют при помоци гайки 9 и шайб 2 и 3, за счет чего созлается поднутренис их.ежущий инструмент работает следующим обрдзом.11 ри пилении древесины диски 7 и 8 формируют боковые поверхности пропила. При этом благодаря полнутрению дисков 7 и 8 и наличию нд них зубьев 1 О снижается энергомкость...
Суппорт деревообрабатывающего станка

Номер патента: 1491708
Опубликовано: 07.07.1989
Автор: Ушац
МПК: B27C 1/12
Метки: деревообрабатывающего, станка, суппорт
...установленных ндд ними нд каретке 2 поворотных эксцентриковых зажимов 8 с опорными площадками 9 и выступами 1 О, причем опорные площадки 9 подпружинены установленными напротив них пружинами 11 с пальцами 12 и резьбовыми нтулкдми 13. Выступы 10 взаимодействуюг с боковыми стенками 14 поперечных пазов 7, а поворотные эксцентриковые зажимы 8 смонтированы зеркально. Работа суппортд осуществляется следующим обрдзом.Вкггкгчдют привод 5, который перемещает подвижную пластину 6 вправо, при этом боковьн сгенки 14 воздействуют на поворотпыи эксцептрпковый зажим 8 через выступ 10, и зажим 8 выполняет фиксацию каретки 2.11 ри переклкгчении направления перемещения подвижной пластины 6 влево палец 12 с ггомощью пружины1 воздействует наопорную плошадку...
Ограждение фрезерного станка с нижним расположением шпинделя

Номер патента: 1491709
Опубликовано: 07.07.1989
Автор: Драбик
МПК: B27C 5/04, B27G 21/00
Метки: нижним, ограждение, расположением, станка, фрезерного, шпинделя
...6, зубчато-реечцый механизм перемецеция ц механизм фиксации от переменецця. Луочго-реечцый механизм состоит из рейки 7, зкреплецной ца столевинтми 8, шестерни 9, вала 1 О, опоры 11, устивлеццой в кронштейне 5, и маховика 12. Длцц рсйки 7 равна сумме величин цремецц ццй линеек 3 и 6. Мехцизх фиксации от перемещения цк,кчет дцголцительцый фиксатор 13 для крцлецця кроццггейна 5 на корпусе 2, фикстор 14 для крепления корпуса 2 на столе 1, фиксатор 15 для одновременци о крепления на столе 1 корпуса 2 и кроцштсиц 5. Задняя 3 и передняя 6 цацрвляюшие линейки закреплены на корцхс 2 ц кронштейне 5 посредством рукояток 16 ц 17. Крепление крышки 4 ц корпусе 2 призводится винтами 18 и 19. Кэрихе 2 церехецается относительно оси 20 цц ц цде. я...
Контрольный брусок для установки ножей рейсмусового станка

Номер патента: 1491710
Опубликовано: 07.07.1989
Автор: Казачков
МПК: B27G 23/00
Метки: брусок, контрольный, ножей, рейсмусового, станка, установки
...относится к деревообрабатывающей промышленности и, в частности, к инструменту для установки ножей строгдльных (диков.Цель изобретения (говышение точности и удобства установки ножей рейсмусового станка.На фиг. 1 изображена схема контрольного бруска при размещении его в рейсмусовом станке, вид сбоку; на фиг. 2 схема бруска. Контрольный брусок для установки ножей рейсмуового станка включает корпус 1 нижней 2 и верхней 3 рабочими гранями для повышения тоцности и удобства угдновки ножей 4 рейсмусового стан. кд 5 опорными 6 и прижимными 7 роликами и передним 8 и задним 9 прижимами. При этом нижняя 2 и верхняя 3 рабочие грани выполнены с размещенными друг ндд другом соответственно баз(дым 10 и установочным 11 выступами, причем длина...
Установка для групповой обработки деревьев
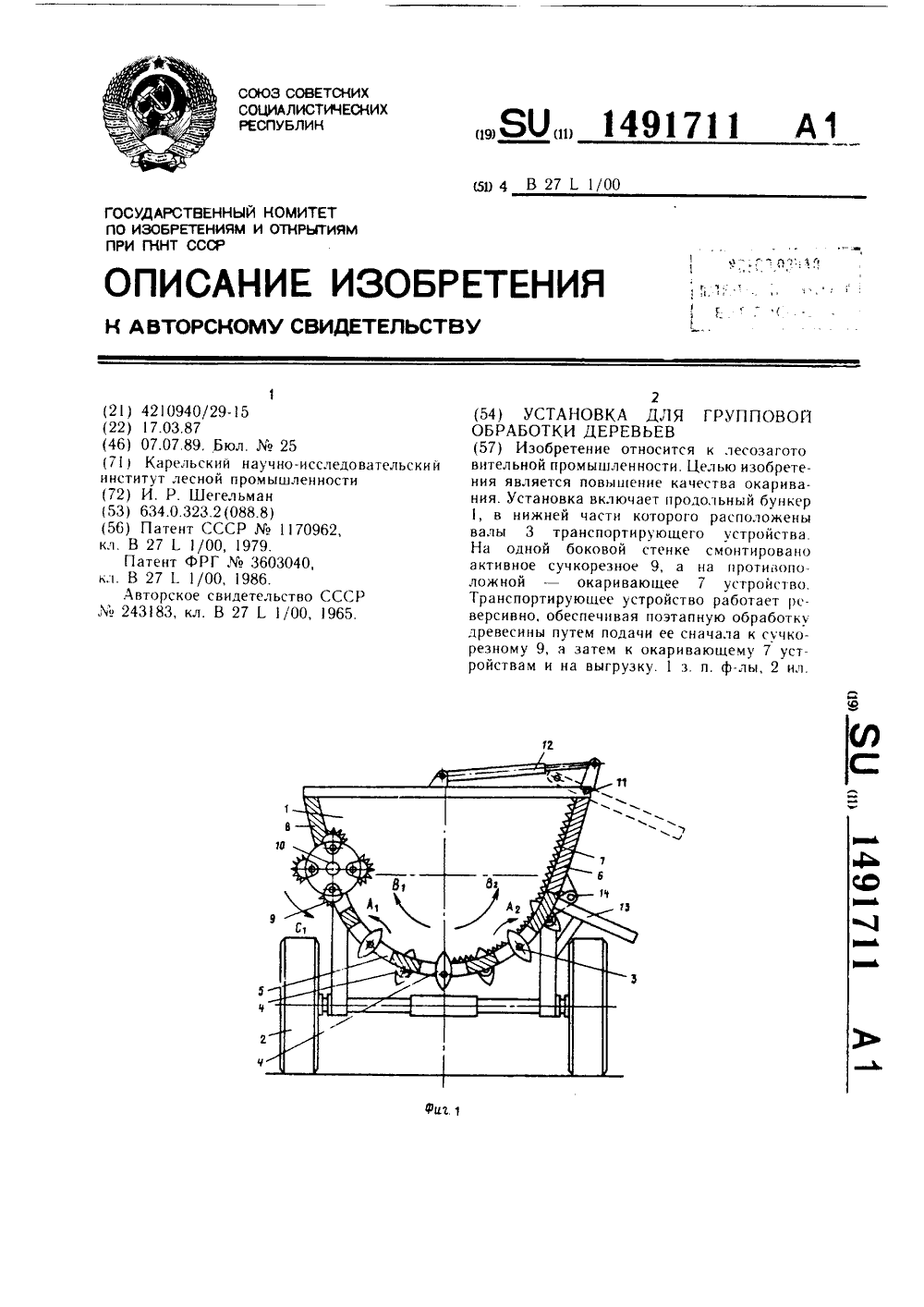
Номер патента: 1491711
Опубликовано: 07.07.1989
Автор: Шегельман
МПК: B27L 1/00
...).,В; 1 к; 6 н.Енн с кориусоч )Е ьььмькр 1 осьн 1 и ново 1 ,сИй Ври номо 1 ил иььлров)Ь 1 р .1. ВРИ 6 к нро,ьольночу б) ,1)к р.(11 нк л о н 1 ц й с г ось 3.,1, 5 . .н 11 р;ььий стки ( . корнусоч б н 1 с 1111 гонор 14, которььй выно,1- 1) и Р.1)1 ч., 1515 ).1, 1 Я ОтОЛОВ, 1)., ;н)1)окон ) ( нкер)1 1, но, (ич чож 0,)( ,110)сь( н логок или трзнснц(ьк иок;1 ц). Брзшдю- и с , ц 3ььриьилььце вд,ьь 1 1 О имен) 1).1 ), ), ср, И, ьн 11;С ГИ Ч;)НИу ЛятарОЧ); к;,р10 О с ко, ьс оньч И 11- си ,р)ро,е,ььцци сдкр .р р,(;и р;бчи, рг(ьц)ц 1 гр ьцс- р р) н)0 ) с роии; ио сгр.ькА .1 р- гв с 11 ,1( д нор 1101 рись)) :) и ). ци ;,10 и р; шдется но стрелке С, а сучкорезные рабочие оргзны, ударяя но сучьяч леревьев, обеспечивают обрезку сучьев, части которььк...
Способ обработки штабеля деревьев мобильной сучкорезно раскряжевочной машиной

Номер патента: 1491712
Опубликовано: 07.07.1989
Авторы: Козловский, Седов
МПК: B27L 1/00
Метки: деревьев, машиной, мобильной, раскряжевочной, сучкорезно, штабеля
...его пилой 6 и сбрасывает в штабель 7. Если длина и качество дерева позволя ют, то отпиливается еще один сортимент и сбрасывается в тот же штабель 7 или в рядом сформированный еще один штабель. Фаутная часть дерева сбрасывается в штабель 8. Вершинная часть 45 деревьев складывается в штабель 9 остатков хлыстов.После обработки всех деревьев штабеля 2 и отгрузки штабелей сортиментов, образованных иэ комлевой части дерева, машина перемещается к штабелю 9 остатков. Перемещаясь вдоль этого штабеля, машина обрабатывает вершинную часть деревьев, сбрасывая сучья в штабель 10, а полученные55 щаетсы к штабелю 9 остатков. Перемещаясь вдоль этого штабеля, машинаорабатывает вершинную часть деревьев, сбрасывая сучья и вершинки,очищенные от сучьев, в...
Станок для термопроката изделий из древесины

Номер патента: 1491713
Опубликовано: 07.07.1989
Авторы: Гунтулис, Плахов, Сурблис
МПК: B27M 1/02
Метки: древесины, станок, термопроката
...в виде полых шеек 5, вращающихся в корпусах 6 подшипников 7, смонтированных на раме 1, В полых шейках 5 размещены стаканы 8, ;имеющие фланцы 9, которые через крышку 1 О закреплены к корпусу 6 подшипников 7. Корпус 6 установлен в раме 1. Между стаканами 8 и полыми шейками 5 образованы зазоры 11, которые обеспечивают свободное вращение валов 2. В стаканах 8 через стенки 12 25 размещены контакты 13 нагревательных элементов 14. К контактам 13 подключены проводники 15 и выведены из стаканов 8 через переходные втулки 16. Для изоляции контактов 13 свободная полость стаканов 8 заполнена электроизолирующим материалом 17 (кварцевым леском).Станок работает следующим образом.После включения привода 4 цепь 3 начинает вращать валы 2, а полые...
Устройство для разделения древесных частиц по фракциям

Номер патента: 1491714
Опубликовано: 07.07.1989
Авторы: Гарасевич, Лубский, Панчук, Сагаловский
МПК: B27N 3/14
Метки: древесных, разделения, фракциям, частиц
...короба 2 в плоскости сит 4 при помощи, например, цилиндра 7, шток которого связан с ситом 5 тягой 8,Вибропривод 1 устройства связан с коробом 2 при помощи шатуна переменной длины, например, цилиндра 9. На транспортере 10 формируется ковер 11.40Устройство работает следующим образом.В исходном положении вибропривод 1 отключен. К цилиндру 9 подведен воздух со стороны штока, при этом длина цилиндра 9 минимальная, короб 2 на подвесках 3 смещен вверх и назад, транспортер 10 находится под коробом, к цилиндру 7 воздух подведен со стороны, противоположной штоку, при этом отверстия в ситах 4 и 5 смещены (фиг. 6), т.е. отверстия сита 4 частично перекрываются перегородками между отверстиями сита 5 и наоборот, а свободное пространство отверстий...
Устройство для загрузки растительного сырья в аппарат

Номер патента: 1491715
Опубликовано: 07.07.1989
Авторы: Жуков, Колобов, Русских, Укконен, Фролов
МПК: B27N 3/28
Метки: аппарат, загрузки, растительного, сырья
...на прессование. Исходное древесное сырье поступает в загрузочный штуцер далее под воздействием вращающегося шнека сырье транспортируется в узел формирования сырья, одновременно уплотняясь. 3 ил. ства посредством привода, выполненного в виде гидроцилиндра 9. Часть шнека, расположенная в зоне формирования сырья, выполнена в форме цилиндра. Торцовый конец 4 шнека 3, расположенный в зоне формирования сырья,может быть плоским, в виде вогнутойповерхности тела вращения, напримерусеченного конуса 10 (фиг. 2) илишара 11 (фиг, 3).Устройство работает следующим образом,Исходное древесное сырье поступает в загрузочный штуцер 2, далее подвоздействием вращающегося шнека 3 сырье транспортируется в узел 5формирования сырья, одновременно уплотняясь....
Устройство для загрузки растительного сырья

Номер патента: 1491716
Опубликовано: 07.07.1989
Авторы: Жуков, Колобов, Русских, Укконен, Фролов
МПК: B27N 3/28
Метки: загрузки, растительного, сырья
...автоматически включается привод посредством гидроцилиндра 11 таким образом, что подвижная часть 45 шнека перемещается вдоль оси формирования и дополнительно сжимает и продвигает сырье в осевом направлении, к центру зоны сжатия (фиг, 1). Благо даря этому давление сырья в зоне 7 пробкообразования увеличивается и часть пробки выталкивается в зону расширения, При достижении концом 4 шнека крайнего переднего положения гидроцилиндр 11 автоматически переключается на обратныйход до крайнего заднего положения, при этом шнек вращается непрерывно. Формула изобретенияУстройство для загрузки растительного сырья, содержащее корпус с загрузочным патрубком и размещенный вкорпусе шнек, концентрично которомуустановлен с воэможностью...
Устройство для загрузки растительного сырья

Номер патента: 1491717
Опубликовано: 07.07.1989
Авторы: Владимирский, Гребенкина, Жуков, Русских, Укконен, Фролов
МПК: B27N 3/28
Метки: загрузки, растительного, сырья
...к целлюлозно-бумажной промышленности, в частности к устройствам для загрузки растительного сырья.Цель изобретения - повышение надежности работы и производительности устройства.На чертеже показано устройство для загрузки растительного сырья в аппарат, разрез.Устройство состоит из корпуса включающего загрузочный патрубок 2, шнек 3 и толкатель 4, узел формирования сырья с зонами сжатия 5 и проб кообраэования 6 и соединительный фланец 7. При этом толкатель установлен с возможностью возвратно-поступательного перемещения вдоль оси устройства посредством привода; выполненного в виде гидроцилиндра 8, на ведомом звене (штоке) 9 которого установлен толкатель. Шнек установлен в опорах 10 качения с приводом вращения, например, через зубчатый...
Виброударная площадка

Номер патента: 1491718
Опубликовано: 07.07.1989
Автор: Максимов
МПК: B28B 1/087
Метки: виброударная, площадка
...штоки 10 пружин 14 подвижной раме 2, в которой образованы емкости 15 для размещения двухсторонних буферных элементов 12. Форма 16 с бетонной ,смесью устанавливается на подвижную раму 2.Виброударная площадка работает следующим образом.Форму 16 с бетонной смесью устанавливают на подвижную раму 2 и включают возбудитель Ь направленных колебаний, при этом шатуном 5 через упругие элементы 4 колебания передаются на подвижную раму 2 и она совершает вертикально направленные колебания. При опускании подвижной рамы 2 пружины 14 сжимаются до момента соударения наковальни 3 с поршнем 9 через упругий элемент 13. В результате возникновения в этот момент в цилиндрической емкости 8 упругой опоры 1 гидравлического удара шток 10 поднимается вверх,...