B25J 9/08 — отличающиеся конструкцией модулей
Модуль манипулятора

Номер патента: 1433790
Опубликовано: 30.10.1988
Авторы: Дмитриев, Дьяков, Дьякова
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
...на валу 22, ; и шестерню 23 связан с электродвигателем , 24, установленным на основании 1. Вал 22 : расположен в прорези 25 качающегося корпуса 26, выполненной по длине его ок ружности на угле максимального качания относительно вала 14. Жесткие колеса 4, 17 и 1.8 внутренней цилиндрической поверхности имеют зубчатые нарезки полукруглого профиля, которыми взаимодействуют ролики 5, причем количество впадин в зубчатых нарезках больше, чем число роликов, взаимодействующих с ним. Генератор 16 волн через коническое зубчатое колесо 27, закрепленное на валу 22, связан с элекродвигателем 28,Модуль манипулятора работает следующим образом.Для вращения поворотного корпуса 2включается электродвигатель 9. Движение передается на зубчатое...
Манипулятор модульного типа

Номер патента: 1435422
Опубликовано: 07.11.1988
Автор: Кузьмин
МПК: B25J 18/00, B25J 9/08
Метки: манипулятор, модульного, типа
...14, в одном положении (1) соединяю щего звено 7 с зубчатым венцом 12, в другом(11) - зубчатые венцы смежных звеньевосновного вала, а в третьем (111) - промежуточное.Поворот рычага из одного положения в другое может осуществляться от электромагнитного устройства 15. Дополнительный вал 6 одним концом соединен с силовым приводом 2, а другим - со схватом 3.Манипулятор работает следующим образом.В исходном положении схват 3 располагается в позиции с центром в точке Г, приэтом звенья 7 повернуты относительно друг друга так, что ось механическоЙ руки 4 составляет прямую, а рычаги 14 входят в зацепление зубчатых венцов 12 соседних втулок, занимая положение 11. От силового привода 2 в этом положении возможен через вал 6 поворот захвата 3...
Модуль манипулятора

Номер патента: 1445945
Опубликовано: 23.12.1988
Авторы: Монашко, Семенюк, Щекин
МПК: B25J 19/00, B25J 9/08
Метки: манипулятора, модуль
...пар на звене 21 взаимно перпендикулярны. Вариант соединения промежуточного звена 19 с звеном 21 и поводками 14 и 13 показан на фиг. 2.Модуль манипулятора работает следующим образом.Для подъема звена 21 вдоль оси У. приводы 1 и 2,3 и 4,5 и 6,7 и 8 перемещаются один навстречу другому так, что расстояние между парами приводов одинаковое (фиг. 4). При опускании вдоль этой оси приводы 1 и 2,3 и 4,5 и 6,7 и 8 расходятся, При повороте звена 21 относительно оси У (фиг. 5) приводы 1 и 2, 5 и 6 не перемещаются, приводы 3 и 4 сближаются, а приводы 7 и 8 расходятся или наоборот. При повороте звена 21 относительно оси Х (фиг. 6) приводы 3, 4, 7 и 8 не перемещаются, приводы 1 и 2 сближаются, а приводы 6 и 5 расходятся или наоборот. При повороте...
Модуль манипулятора

Номер патента: 1466934
Опубликовано: 23.03.1989
Авторы: Болотин, Певзнер, Фомичев
МПК: B25J 9/08
Метки: манипулятора, модуль
...участка пути (когда упрупй элемент це взаимодействует с основанием) левый конец упругого элемента 3 начинает взаимодействовать с основанием, подвижное звено 2 начинает тормозиться за счет перехода кинетической энергии в потенциальную энергию упругого элемента.Если бь в системе не было потерь энер. гии на преодоление сил трения, то под вижное звено достигло бы левой позиции, при этом скорость звена стала бы равной нулю,а деформация упругого элемента достигла бы такой же величины, какой была в правой позиции, Наличие в системе трения обусловливает необходимость установки привода, восполняющего потери энергии на преодоление этих сил. Привод, который используется в данном модуле, не работает на восполнение потерь на трение в течение всего...
Соединительный модуль руки промышленного робота

Номер патента: 1491691
Опубликовано: 07.07.1989
Авторы: Джолдасбеков, Кайнарбеков, Слуцкий
МПК: B25J 19/00, B25J 9/08
Метки: модуль, промышленного, робота, руки, соединительный
...комбинат "Патент", г.ужгород, ул. Гагарина,101 Изобретение относится к машино - строению и может быть использовано в конструкциях промышленных роботов.Цель изобретения - расширение функциональных возможностей робота.На фиг. 1 дана схема модуля; на фиг. 2 - схема поворотного элемента,Соединительный модуль содержит фланцы 1, выполненные в виде отдельных звеньев, которые жестко соединяются со схватом 2 и с последним звеном 3 механической руки. К фланцам 1 крепятся соединительные планки 4 с продольными пазами 5. Между планками 4 установлен поворотный элемент 6. Он выполнен тоже с продольными пазами 5. Соединительный модуль снабжен зажимами 7, установленными в пазах 5. Поворотный элемент 6 выполнен из вала 8 и втулки 9,...
Манипулятор

Номер патента: 1491692
Опубликовано: 07.07.1989
Авторы: Аугустайтис, Бансявичюс, Гинетис, Рибокене
МПК: B25J 9/08
Метки: манипулятор
...происходит посредством силовых гидроцилиндров 16 и 17 соответственно, связанных через распределительный клапан 18 с гидронасосом 19.Управление приводами манипулятора происходит с помощью блока 20 управления двигателем 5 и блока 21 формирования управляющих сигналов.Манипулятор работает следующим образом.От блока 21 подается управляющий сигнал ца распределяемый клапан 18 для включения в работу гидроцилиндра 16, который свои м штоком перемешает каретку по направляющей 2, при этом муфта 1 сцепляет вал датчика 10 с зубчатым колесом 12. Каретка, перемещаясь через зубчатую рейку 14, вращает зубчатое колесо 12, которое вращает вал датчика 10. Корпус датчика 10 вместе с частью 4 каретки удерживается от поворота двигателем 5, ротор которого...
Искусственная мышца

Номер патента: 1526983
Опубликовано: 07.12.1989
Автор: Аграновский
МПК: B25J 1/02, B25J 9/08
Метки: искусственная, мышца
...1, со (ерждцс й Крд, ВЫНОЛНЕННЫй ИЗ НЕр(СтяжИМЫХ ни гей, обрдзх юаих тканевую структуру прс и 55 цествс нно ромбической формы хдмера 5(же бьгть с)брдзовд на, ндприх(с р, хтс м ,(вя.ы (, н(я ) злови 3 и( к)нцдч г 6 лгчки Вх 1 с 1 яя и)верхи("ь 4 6,1)чли ил 1 сс 1 . ЛРЫГИС И ЗГ;(СТИ(НС)С) ЧатЕРИД.1 Д, НДНРИ чср, си,)сс)ИНог) алдсточсрд, 6,дддющег иВЫИсннси гермостойкосгьк) Вну три кдчеры сдержи гся ддсорбдт 5, нднричер хлдлсн, С С ВННОКДЗД ННг й В ВИД( МС,КИ Х НХ ЗЫРЬ- кВ. АдсГ)бентч яг(,1 тся иВерх 1 Г)(тныЙ с,сй тс рчд.ектрическс)го д.чентд 6, преЛ. с вляюцсг) собой дктивирс)ваннк з,ц ктр- )гвсд(1 и 5 Г,г.род(осг 1 ,кнс. 1 рс)д(,1 ныч ггшц иге.ьш с и обо,оцки рдсно,и)жс ниеч и Гси. г)кГивирвдние )счсвлЯ(т 51 6. р;(И иг ).Н)КНд ИЕрЕГрЕ...
Модуль ротации

Номер патента: 1537511
Опубликовано: 23.01.1990
Авторы: Бобовкин, Крисятецкий
МПК: B25J 11/00, B25J 9/08
...рейку 6 ,зубчато-реечной передачи установлена прунина 8, а на концах зубчатой рейки 6 закреплены регулируемые упоры 9. 2 В Для фиксации положения вала 2 имеются шариковый фиксатор 10 и коничес, кий штырь 11, установленный соосно отверстию в корпусе 1. При этом на валу 2 выполнены радиусные отверстия, З 0 предназначенные для взаимодействия с коническим штырем 11. Иодуль ротации установлен на механической руке12 манипулятора, несущей нерегулируемый упор 13 и штырь 11 установлены автономно от руки 12.Иодуль ротации работает следующим образом. При наезде механической руки 12 ма;0нипулятора на любой нерегулируемыйупор 13 зубчатая рейка 6 вдавливается внутрь корпуса, сжимая пружину 8, Зубчатая рейка 6 тем самым вращает зубчатое колесо 5, а...
Модуль манипулятора

Номер патента: 1549744
Опубликовано: 15.03.1990
Авторы: Войнов, Кудрявцев, Солдаткин, Уваров, Уварова
МПК: B05D 1/02, B25J 17/00, B25J 9/08 ...
Метки: манипулятора, модуль
...кожухом, выполненным в виде сильфона, который предохраняет дифференциальный привод 645 от попадания рабочей жидкости, Подача рабочей жидкости(краска, лак, консервант, моющая жидкость) из резервуара (не показано) осуществляется под давлением по каналу 17 внутри вала 13 и по каналам 18 в распылительной головке 16. Образующийся факел 19 из рабочей жидкости наносится на обрабатываемую поверхность 20. На противоположном конце вала 13 жестко установлено зубчатое колесо 21 дополнитель 55 но введенной зубчато"реечной передачи 22. Продольная ось колеса 21 совпадает с продольной осью поперечной оси 1, а само колесо 21 выполняе роль статического уравновешивателя исполнительного органа 14.Модуль манипулятора работает следующим...
Манипулятор модульного типа

Номер патента: 1558663
Опубликовано: 23.04.1990
Автор: Крисятецкий
МПК: B25J 9/08
Метки: манипулятор, модульного, типа
...для стыковки с другиммодулем перемещения, например, установлены на подвижных штангах 4 последнего, т.е, первый модуль перемещениястановится исполнительным звеном второго модуля перемещения, По этойсхеме возможно создание целой гаммакомпоновок манипуляторов,На Фиг,1 и 2 модуль 1 перемещения установлен на неподвижных штангах 4, в его клемме зажата колонна16, на которой закреплен первый модуль 1 перемещения, Через горизонтальные втулки 15 второго модуля 1перемещения пропущены подвижные штанги 4, на которых закреплен третиймодуль перемещения с вертикальнымиподвижными штангами 4 и исполнительным органом 3 (схватом ),На фиг,З модуль 1 перемещения идополнительная опора 6 связаны междусобой штангами 4 и образуют основание.На штангах...
Многопозиционный модуль перемещения промышленного робота

Номер патента: 1558664
Опубликовано: 23.04.1990
Автор: Молодкин
МПК: B25J 9/08
Метки: многопозиционный, модуль, перемещения, промышленного, робота
...модуль перемещения промышленного робота работаетследующим образом,При движении каретки 2 влево происходит соприкосновение упора 1 О,смонтированного на каретке 2, с подпружиненным упором 8, При этом происходит смещение подпружиненного упора 8 и нормально включенного тормозного устройства 4, закрепленного нанем при помощи тормозного башмака 6Это смещение осуществляется до соприкосновения упоров 15 и 16, закрепленных на корпусах тормозных устройств 3 и 4, и равно , задаваемому регулировочным винтом 12, После чего происходит включение микропереключателя13, который дает команду на включе -ние исполнительного органа, закрепленного на каретке 2 и одновременно наподачу рабочего тела в полости силовых цилиндров тормозных устройств3 и...
Манипулятор

Номер патента: 1562127
Опубликовано: 07.05.1990
МПК: B25J 3/02, B25J 9/08
Метки: манипулятор
...служит стойкойдля последующего параллелограмма. Дпякинематической связи параллелограммов на кривошипе 21 закреплен шкив24, на кривошипе 25 закреплен шкив26. На шкивах 24 и 26 закреплены концы элемента 27 гибкой связи, перекрестно охватывающей оба шкива, К шатуну 28 присоединен рабочий орган 29.Траверса 2, рычаги 30 и 31 и кривошип21 со шкивом 24 образуют один параллелограммный механизм, а рычаги 31 й 32, кривошип 25 со шкивом 26 и шатун 28 - другой параллелограммный механизм устройства вертикального перемещения рабочего органа 29. Рычаг 31 является общим звеном для обоих параллелограммов и шарнирно связан со шкивами 24 и 26Манипулятор работает следующим образом.При включении привода 15 получают вращение распределительные валы 14 и 18,...
Соединительный модуль сборочного робота

Номер патента: 1577952
Опубликовано: 15.07.1990
Авторы: Воротников, Рунков
МПК: B23P 19/00, B25J 9/08
Метки: модуль, робота, сборочного, соединительный
...блок линейной податливости, а сильфоны 4 образуют блок угловой податливости. Внутри сильфонов 3, 4 устанавливается механизм фиксаций от сдвига фланцев, представляющий из себя стержни 6, 7 закрепленные на торцах 8, 9 соответственно. В стержнях 6, 7 соответственно выполнены каналы 10, 11 для подачи рабочей среды, Б качестве рабочей среды используется жидкость. На свободном конце стержня 7 выполнен конический выступ 12, а на свободном конце стержня 6 выполнена ответная коническая выемка 13. Канал 1 О соединен с выходом 14 трехпозициоиного клапана 15, входы 16, 17 которого соответственно соединены с магистралью низкого давления и магистралью высокого давления. Управление трехпозиционным клапаном 15 ведется с помощью золотника 18....
Самоцентрирующееся запястье робота

Номер патента: 1577953
Опубликовано: 15.07.1990
Автор: Рунков
МПК: B25J 9/08
Метки: запястье, робота, самоцентрирующееся
...7, 8 - графики изменения силы взаимодействия в зависимости от зазора между корпусом и подвижным фланцем.Устройство содержит корпус 1, подвижный фланец 2, катушку возбуждения 3, соединенную с регулируемым источником то ка, постоянный магнит 4, сердечник 5 конической формы. Возможен вариант выполнения устройства (фиг. 3), когда подвижный фланец 2 поджат к корпусу 1 с помощью пружин 6. Возможен вариант выполнения устройства (фиг. 5), когда в корпусе 1 установлено сопло 7, связанное с источником сжатого воздуха, а в подвижном фланце 2 выполнена выемка 8. Устройство работает следующим образом.В исходном положении на катушку возбуждения 3 подается постоянный ток такой полярности, чтобы постоянный магнит 4 вместе с подвижным фланцем 2...
Модуль манипулятора
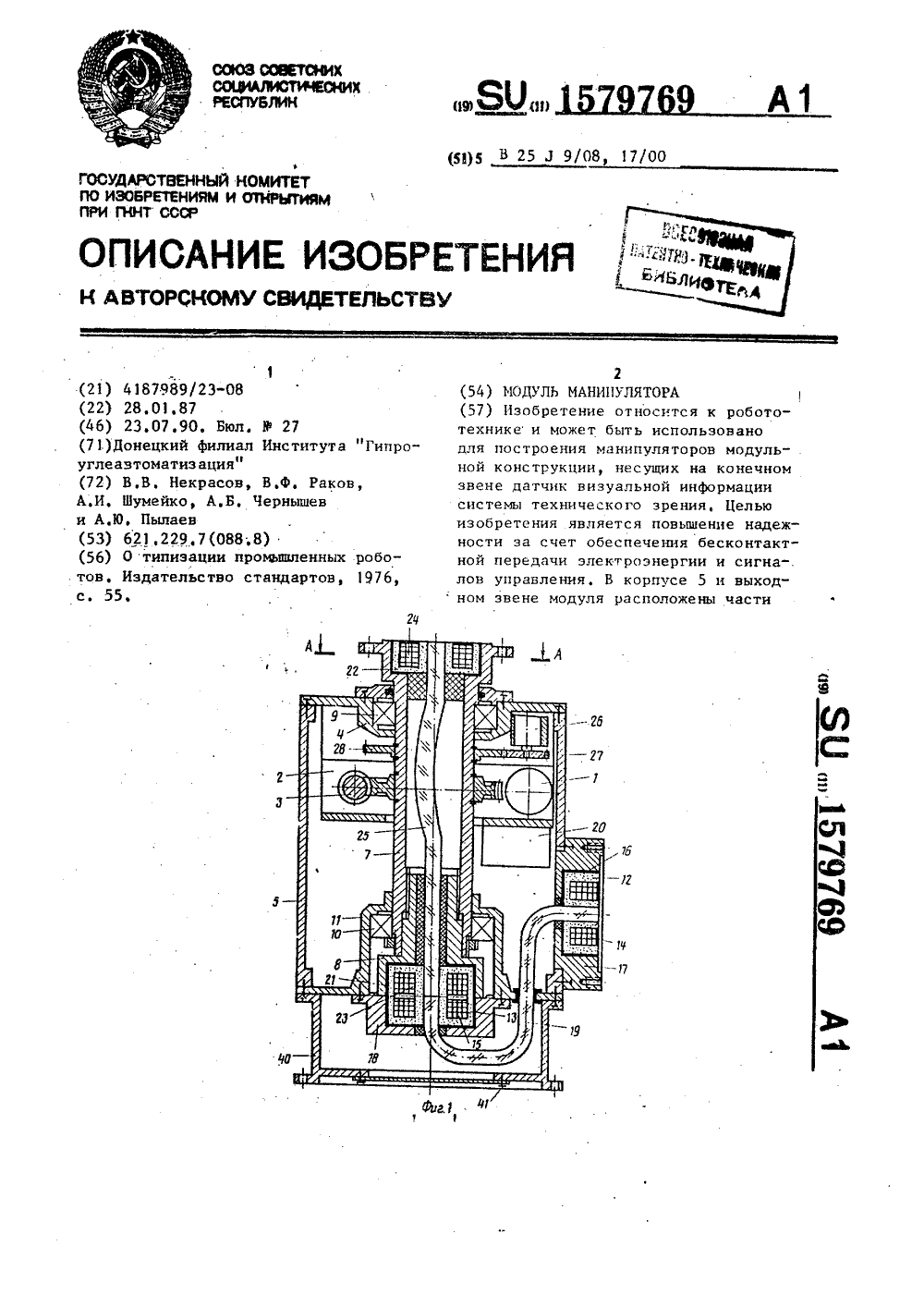
Номер патента: 1579769
Опубликовано: 23.07.1990
Авторы: Некрасов, Пылаев, Раков, Чернышев, Шумейко
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
...1крутящий момент передается через червячную передачу 3 на полый вал 7,а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения, Части стыковочных узлов соосно состыкованы торцами и вращаютсядруг относительно друга. При этомцилиндрическая форма магнитопроводов13 и 2 обеспечивает непрерывную передачу электроэнергии при взаимномвращении выходного звена 6 и корпу.са 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 по-.ступает на вход модуля и вводитсяв кабель связи через стыковочныйузел 39.Конструкция модуля обеспечивает 45возможность и обратной передачи какэлектрических, так и оптических сигналов,.поэтому каждый из внешних стыкованных узлов может быть как входом,так и...
Модуль резонансного манипулятора

Номер патента: 1585143
Опубликовано: 15.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 9/08
Метки: манипулятора, модуль, резонансного
...Фиксаторы 12 и 13 могут приводиться в движениеэлектромагнитами, линейными электродвИгателями и т.п. (не показаны).На валу 9 кривошипа 8 закреплен оди конец спиральной пружины 14, дрязгой конец которой через червячное колесо 15 и червяк 16 связан с двигателем 17.Звено 3 может быть связано с исполнительным механизмом робота или имФть схват.Устройство работает следующим образом.45Исходным положением устройства являтся положение выстоя, когда звено 3:1 анимает, например, крайнее левое положение и своим упором 4 максимально сжимает пружину 6. Оси шатуна 7 и крйвошипа 8 примерно совпадают, при этом система зафиксирована в положении неустойчивого равновесия Фиксатором 12. Двигатель 17 включен и заводт спиральную пружину 14, Во избежуание...
Манипулятор

Номер патента: 1627401
Опубликовано: 15.02.1991
Автор: Простопопов
МПК: B25J 9/08
Метки: манипулятор
...следующим образом,Принимаем эа исходное положение положение ромбообразного звена 2 в горизонтальной плоскости (см, фиг. 1), 5 10 15 20 25 30 35 40 45 50 55 Сжатие-разжатие ромбообразного звена 2 в горизонтальной плоскости осуществляется при работе двигателей 11, расположенных в модулях 3 и 5 перемещений, причем двигатели 11 в модулях 4 и б перемещений не включены, а шарнирные узлы 7 обеспечивают ориентацию ромбообразного звена 2 в пространстве. При этом модули 3 и 5 перемещений расположены в одной плоскости. При рабое двигателей 11, расположенных в модулях 4 и б перемещений со стороны только модуля 5 перемещения, последний будет описывать захватом 8 дугу относительно оси А-А, Модуль 5 перемещения (фиг, 5) займет положение, при котором...
Двухзахватная головка манипулятора

Номер патента: 1634491
Опубликовано: 15.03.1991
Автор: Колпаков
МПК: B25J 15/00, B25J 9/08, H01L 21/68 ...
Метки: головка, двухзахватная, манипулятора
...а вершины 7 шарнирно связаны со штоком 8, имеющим привод от соленоида 9 и возвратной пружины 10. На других вершинах параллелограммов закреплены губки 11. Корпус 1 установлен на поворотной оси 12 манипулятора, содержащего основание 13, координатный стол 14, на котором установлен спутник 15, на клейкой поверхности диафрагмы 16 которого закреплены кристаллы 17, второй координатный стол 18 с кассетой для укладки выбранных кристаллов, механизм 19 подкола с опорными пальцами 20 и центральным пальцем 21. Двухзахватная головка манипулятора работает следующим образом.Схваты 2 и 3 для отработки заданной программы выводятся с помощью поворотной оси 12 манипулятора на требуемые позиции. Механизм 19 подкола освобождает один из кристаллов 17 от...
Манипулятор

Номер патента: 1645135
Опубликовано: 30.04.1991
МПК: B25J 11/00, B25J 9/08
Метки: манипулятор
...установлены на поворотном звене 3 манипулятора. Звено 19 этого пантографа шарнирно соединено с выдвижным звеном 4 манипулятора, а на конце звена 20 шарнирно установлен ролик 21, находящийся в направляющих выходного звена 6 механизма уравновешивания.Передаточный механизм может быть также выполнен в виде дифференциальной зубчато-реечной передачи (Фиг,З). При этом блок 22 зубчатых колес находится в зацеплении с двумя зубчатыми рейками 23, и 24. На конце рейки 3 шарнирно установлен ролик 25, взаимодействующий снаправляющей звена 6.Рейка 23 может быть жестко закреплена на поворотном звене манипулятора (фиг.4). При этом блок 22 зубчатых колес своей осью взаимодействует с направляющей выходного звена 6 механизма уравновешивания.Манипулятор...
Модуль резонансного манипулятора

Номер патента: 1646846
Опубликовано: 07.05.1991
Авторы: Белов, Быков, Кошель, Степин, Юрченков
МПК: B25J 9/08
Метки: манипулятора, модуль, резонансного
...в пределах допуска, причем каждая замена упругих элементов в процессе эксплуатации приводит к изменению этого нейтрального положения. Установка ходового винта 7 в подвижном звене 2 с возможностью его осевого перемещения, например, путем вращения опоры, выполненной в виде гайки 9 с наружной резьбой, в результате которого она, перемещаясь по резьбе внутренней полости подвижного звена 2, толкает ходовой винт 7, позволяет привести положение гаек 5 и 6, установленных на этом ходовом винте, в соответствие реальному нейтральному положению подвижного звена 2 и, следовательно, избежать лишних энергозатрат.Необходимость изменения нейтрального положения может возникнуть и в других случаях, например при перемещении модулем груза значительной...
Модуль движения робота

Номер патента: 1646847
Опубликовано: 07.05.1991
Автор: Потоцкий
МПК: B25J 9/08
Метки: движения, модуль, робота
...их суммарная высота должна превышать максимальную длину штоковой полости для гарантированного образования моментного цилиндра, Таким образом при крайнем верхнем положении поршня 2, когда он прижат к перегородке 13, образуется моментный цилиндр с полостями 15 и 16. В крышке 12 выполнено отверстие 17 для подачи рабочего тела в бесштоковую полость 11, а в крышке 9 -отверстия 18 и 19, предназначенные для подачи рабочего тела соответственно в полости 15 и 16 образовавшегося моментного цилиндра.Модуль движения робота работает следующим образом,Исходным является положение, когда поршень 2 и поворотная лопасть 14 находятся в крайнем нижнем положении, При этом фиксатор 7 располагается в одним из отверстий 8 крышки 9. При подаче рабочего тела в...
Модуль поворота манипулятора

Номер патента: 1646848
Опубликовано: 07.05.1991
МПК: B25J 11/00, B25J 9/08
Метки: манипулятора, модуль, поворота
...движения равны нулю; так как направления из векторов в укаэанные моменты совпадают с осью паза кулисы. В процессе поворота исполнительного звена 2 траектория движения цевки удаляется от центра вращения кулисы, что существенным образом улучшает динамику поворотного механизма,Механизм регулирования угла поворота состоит из рычага 13, жестко установленно 40 го на валу исполнительного звена 2, и регулируемых посредством винтов 15 упоров 14, Регулируемые упоры позволяют установить необходимую зону и угол поворота колонны,Подвод и отвод воэдуха к цилиндру 5.осу.ществляются через штуцера 16 и 17. Контрольконечного положения исполнительного звена манипулятора осуществляется магнитоуправляемыми электрическими датчиками 18, 50 установленными на...
Модуль промышленного робота

Номер патента: 1657371
Опубликовано: 23.06.1991
Авторы: Алексеев, Березников, Карпов, Ращинский, Федорин
МПК: B25J 17/00, B25J 19/06, B25J 9/08 ...
Метки: модуль, промышленного, робота
...через муфту 5. Основная полость 6, образованная внутри полого корпуса 1 и выходного звена 2, соединена каналом 7 и трубопроводом 8 с источником воздуха; не содержащего паров агрессивных сред, или с устройством генерации воздуха, не содержащего паров агрессивных сред. В полом корпусе 1 выполнены расточки, образующие дополнительные полости 9. Причем дополнительные полости 9 связаны посредством каналов 10 между собой и через трубопровод 11 с источником вакуума или с устройством генерации отрицательного давления (не показан) и изолированы от основной полости 6 и внешней среды спаренными уплотнениями 12 и 13. Основная полость 6 отделяется от внешней среды в местах подвижного соединения полого корпуса 1 и выходного звена 2 спаренными...
Модуль резонансного манипулятора

Номер патента: 1662839
Опубликовано: 15.07.1991
Авторы: Белов, Кошель, Юрченков
МПК: B25J 9/00, B25J 9/08
Метки: манипулятора, модуль, резонансного
...добиваются перемещением конца пружины относительно скобы 9, для чего ослабляют натяжение винтов 11, уменьшая силу прижатия пружины к выступающим концам скобы 9, что позволяет освободить конец пружины б или 7 и переместить его в нужную сторону.Подзавод пружины, также необходимый для настройки привода, осуществляется следующим образом, Ослабляют натяжение двух винтов 10 (возможен вариант крепления и с помощью одного винта), уменьшая силу трений между скобой 9 узла крепления и дном направляющего паза на внутренней поверхности корпуса, перемещают узел крепления вместе с зажатым в нем, концом пружины б или 7 вдоль направляющего паза в нужном направлении с последующей фиксацией с помощью тех же винтов 10. Если длины продольного...
Приводной шарнир манипулятора

Номер патента: 1675079
Опубликовано: 07.09.1991
Авторы: Войнов, Давыскиб, Кудрявцев, Уваров, Феофанов
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, приводной, шарнир
...значение, магнитное поле в зубчатом зацеплении колеса 12 и роликов 18 и в кинематической паре ролики 18 - генератор 6 волн выступает в роли "воздушной прослойки", обеспечивающей устранение трения качения. На корпусе 1 может быть установлена плита 25, по которой элементы шарнира базируются на других элементах в конструкции манипулятора, а на выходном валу 15 шарнира может быть установлен ведущий шкив 26 с ремнем 27 ременной 5 10 15 20 25 30 35 40 45 50 55 передачи для передачи движений другим элементам конструкции манипулятора.Шарнир работает следующим образом,От системы управления (не показана) подается сигнал на включение электродвигателя 2. При этом начинает вращаться выходной вал, а его зубчатый венец передает вращение через...
Модуль резонансного манипулятора

Номер патента: 1710335
Опубликовано: 07.02.1992
Авторы: Белов, Быков, Кошель, Степин, Юрченков
МПК: B25J 9/08
Метки: манипулятора, модуль, резонансного
...его в одном направлении(до момента попадания защелки в один из пазов, например в паз элемента 5), равно количеству энергии, необходимому для перемещения его в противоположном 5 10 направлении (до паза элемента 6). Отсюда равны и количества энергии, запасаемые упругими элементами 10 и 11 в любом из этих крайних положений, а следовательно, равны и количества дополнительной энергии, требующейся для обеспечения перемещения подвижного звена из одного крайнего положения в другое и обратно.На практике реальное нейтральное,положение подвижного звена не совпадает с теоретическим. Это происходит, например, из-за отличия свойств упругих элементов, имеющих неизбежные отклонения в. преде 20 25 лах допуска, причем каждая замена упругих...
Модуль манипулятора

Номер патента: 1710336
Опубликовано: 07.02.1992
Авторы: Кондратенко, Марковский, Филаретов
МПК: B25J 11/00, B25J 9/08
Метки: манипулятора, модуль
...а другой - на барабане 9 привода телескопической руки. На задних торцах выдвижных звеньев 2 и 3выполнены отверстия 22-25 под трбсы. Навыдвижном звене 3 расположен конечный выключатель 26,щим образом.При работе электродвигателя, например, на выдвижение выходного элемента 5 вращается гриводной барабан 9, на который наматывается трос 21. Трос 21, проходя последовательно блоки 14 и 10, отверстие 24 в задней стенке выдвижного звена.3, блоки 18, 20 и 19, отверстие 23. в задней стенке выдвижного звена 2, блоки 13 и 17,отверстие 25 в задней стенке выдвижного звена 3 и блок 11 заставляет выдвигаться толкатель 4 из выдвижного звена 2, растягивая пружину 6, а выдвижное звено 2 - из выдвижного звена 3, растягивая пружину 7. 50 55 При этом...
Поворотный модуль манипулятора

Номер патента: 1605460
Опубликовано: 30.03.1992
Авторы: Гявгянен, Мошкун, Овсянников, Попов
МПК: B25J 9/08
Метки: манипулятора, модуль, поворотный
...быть установлен с помощью под 5шипника 9.В случае необходимости ограничитьугол поворота на .валу 2 закрепляютсяограничители 10 в корпусе 1 выполняется кольцевой паз 11, в котором с помощью болтов 12 Фиксируются упоры 13.снабженные гидроамортизаторами 14.Возможен вариант выполнения устройства (Фиг, 5-8), когда в теле вала 2выполнены сквозные криволинейные кана-,лы 15, разделенные между собой стенками 16, Корпус 1 в этом варианте выполняется с крышкой 17, Спиральные каналы 6,7 сообщаются с каналами 15 при 0помощи кольцевых сопл 18, 19. Каналы 15сообщаются с атмосферой с помощью отверстий 20, выполненных в корпусе 1,и отверстий 21, выполненных в крышке17, На крышке 17 может быть установленподшипник 22,Возможен вариант выполнения...
Манипулятор

Номер патента: 1722807
Опубликовано: 30.03.1992
Авторы: Назаров, Панасенков
МПК: B25J 1/02, B25J 18/06, B25J 9/06 ...
Метки: манипулятор
...Посколькуконическое колесо 18 жестко соединено скорпусом 15 первого звена 2, то оно поворачивается относительно основания 1 вокругоси 21 вверх. При повороте первого звена20 движение через шатун 12 передается на рычаг 10, так как рычаг 9 соединен с крестовиной 20 и остается неподвижнымотносительно основания 1. Рычаг 10 поворачивается против часовой стрелки. Рычаг 1025 жестко соединен с крестовиной 20 второгозвена 2, поэтомукрестовина 20 этого звенаповорачивается относительно первого звена против часовой стрелки, Крестовина 20поворачивает указанное звено относитель 30 но первого звена вверх вокруг оси 22.При повороте второго звена относительно первого вверх коническое колесо 16второго звена, находящееся в зацеплении сконическим колесом 19...
Искусственная мышца

Номер патента: 1722808
Опубликовано: 30.03.1992
Авторы: Аграновский, Акжигитов, Залькинд, Сидоров, Хощь
МПК: B25J 18/02, B25J 9/08
Метки: искусственная, мышца
...2 имеются электрические зажимы 11 и 12, укрепленные наклапане 7 и на второй втулке 6, На торцепервой втулки 5 со стороны внутренней по 30 лости оболочки 2 выполнено седло 13 клапана.7. шток 8 которого расположен внутривтулки 5, колпачок 9 подпружинен пружиной 14 к этой втулке, а в штоке 8 и колпачке35 9 выполнены каналы 15 и 16, соединяющиеподклапанную полость с атмосферой; полость второй втулки 6 сообщена с полс стьюоболочки 2 и с атмосферой, и во втулке 6выполнена резьба под заглушку 17, Клапан40 7, колпачок 9, вторая втулка 6 и заглушка 17выполнены из токопроводящего материала.Устройство содержит также клинья(клеммы) 18, бандажи 19 и серьги 20 длякрепления мышцы к приводимому ею меха 45 низму.Клапан 7 (фиг, 2) содержит на,штоке...