Модуль движения робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1646847
Автор: Потоцкий


Текст
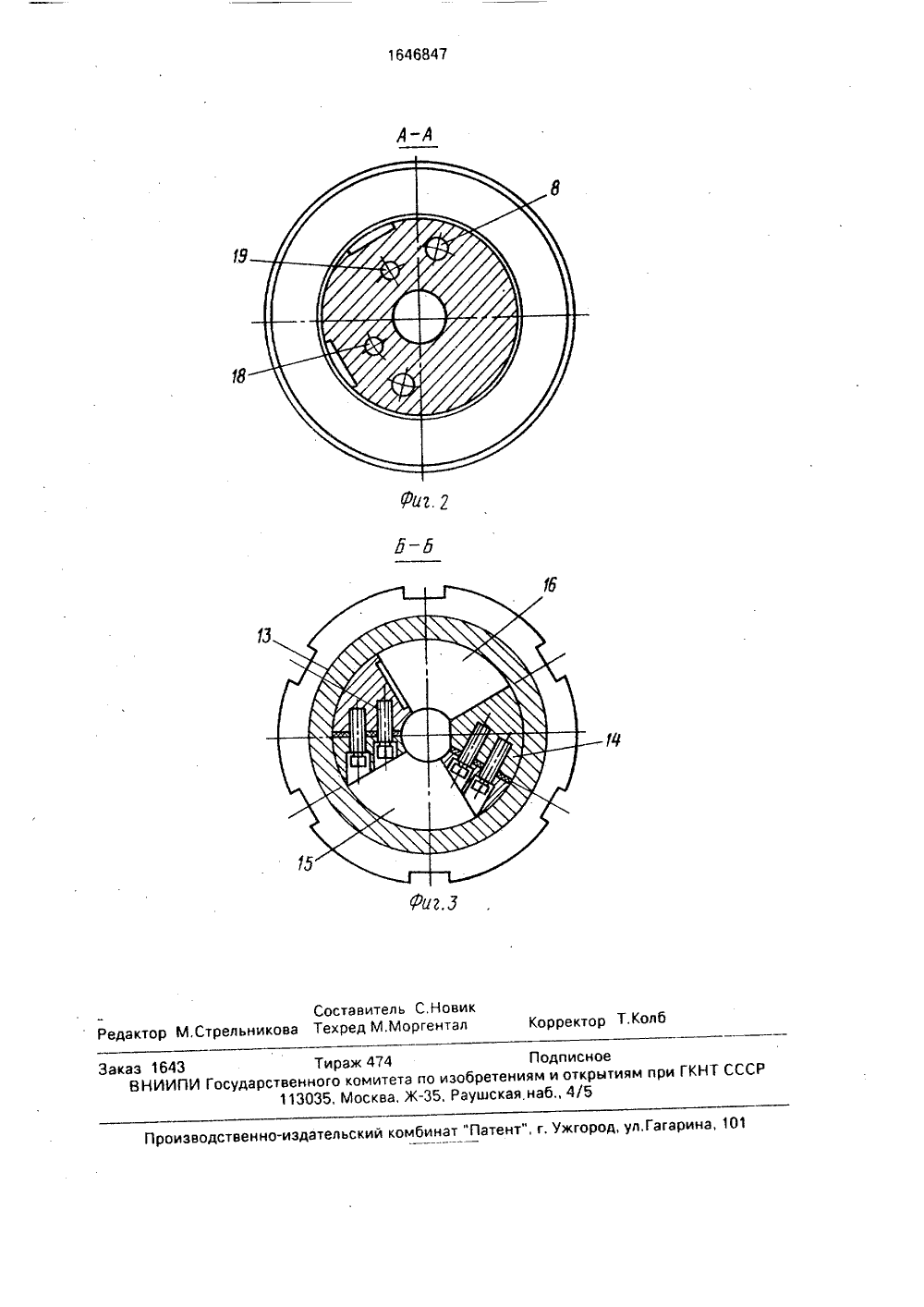
(19) ( 5 В 253 9/ ОПИСА К АВТОРСКОМ РЕТЕНИЯ ИДЕТЕЛЬСТВУ 13 ОСУДАРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯРИ ГКНТ СССР(22) 31.05.89 (46) 07.05.91. Бюл, %17 (72) П.П,Лотоцкий (53) 621-229,72 (088,8) (56) Авторское свидетельство СССР М 1168401, кл, В 253 9/00, 1983. (54) МОДУЛЬ ДВИЖЕНИЯ РОБОТА (57) Изобретение относится к общему машиностроению, в частности к промышленным роботам, Цель изобретения - упрощение конструкции, путем совмещения функций отдельными элементами модуля. При подаче рабочего тела в б силового цилиндр ется вверх, а вме шток 4 с держател сатором 7, В верхн он упирается в упл ку 13, образуя полос При подаче рабочег полости моментног ной подпиткой пол ра 1 поворачиваетс ней шток 4 с держа ное устройство, 3 ил есштоковую полость 11 а 1 поршень 2 перемешасте с ним поднимается ем 5, лопастью 14 и фикем положении поршня 2 отнител ьную перегородти моментного цилиндра, о тела в соответствующие о цилиндра с одновремености 11 силового цилиндя лопасть 14, а вместе с телем 5, несущим захват 16468475 10 15 20 25 30 40 45 505 Изобретение относится к общему машиностроению, в частности к промышленным роботам.Целью изобретения является упрощение конструкции путем совмещения функций отдельными элементами модуля.На фиг,1 изображен модуль движения робота; на фиг,2 - разрез А - А на фиг.1; на фиг.3 - разрез Б - Б на фиг,1,Модуль движения робота содержит силовой цилиндр 1, в котором может совершать возвратно-поступательное движение поршень 2, установленный с помощью подшипниковой опоры 3 на штоке 4 с возможностью поворота вокруг его оси, На противоположном конце штока 4 закреплен держатель 5, предназначенный для поворота и удержания рабочего органа-захвата (не показан). Для повышения точности позиционирования на штоке 4 под держателем 5 жестко закреплено основание 6 с размещенным в нем фиксатором 7, который предназначен для взаимодействия с отверстиями 8, выполненными в крышке 9 штоковой полости 10 силового цилиндра 1, при крайних положениях его поршня 2, которые занимает при поворотах вокруг его оси шток 4 с закрепленным на нем держателем 5. Бесштоковая полость 11 силового цилиндра закрыта крышкой 12, В штоковой полости 10 на крышке 9 жестко закреплена уплотнительная перегородка 13 с возможностью проскальзывания по ней образующей поверхности штока 4, на котором жестко закреплена поворотная лопасть 14 с возможностью ее проскальзывания по внутренней поверхности гильзы силового цилиндра 1 и по плоским поверхностям поршня 2 и крышки 9, Высоты перегородки 13 и лопасти 14 равны и их суммарная высота должна превышать максимальную длину штоковой полости для гарантированного образования моментного цилиндра, Таким образом при крайнем верхнем положении поршня 2, когда он прижат к перегородке 13, образуется моментный цилиндр с полостями 15 и 16. В крышке 12 выполнено отверстие 17 для подачи рабочего тела в бесштоковую полость 11, а в крышке 9 -отверстия 18 и 19, предназначенные для подачи рабочего тела соответственно в полости 15 и 16 образовавшегося моментного цилиндра.Модуль движения робота работает следующим образом,Исходным является положение, когда поршень 2 и поворотная лопасть 14 находятся в крайнем нижнем положении, При этом фиксатор 7 располагается в одним из отверстий 8 крышки 9. При подаче рабочего тела в бесштоковую полость 11 через отверстие 17 крышки 12 поршень 2 перемещается вверх, а вместе с ним движется шток 4 с основанием 6 и фиксатором 7, происходит расфиксация рабочего органа-захвата, Поршень 2 упирается в перегородку 13 и образуется моментный цилиндр,При подаче рабочего тела через отверстие 18 в полости 15 моментного цилиндра происходит поворот лопасти 14 со штоком 4 в подшипниковой опоре 3 с закрепленным на нем держателем 5. При работе моментного цилиндра подача рабочего тела в бесштоковую полость 11 продолжается. При прекращении подачи рабочего тела в бесштоковую полость 11 по окончании поворота держателя 5 рабочее тело, заполняя штоковую полость 10, перемещает вниз поршень 2 и шток 4 с закрепленным на нем держателем 5 с рабочим органом. При этом фиксатор 7 входит в другое отверстие 8 крышки 9, Для подъема штока 4 с держателем 5 и освобожденным от детали рабочим органом вверх прекращается подача рабочего тела в штоковую полость 10, а подается оно в бесштоковую полость 11.Поворот держателя в обратную сторону происходит при продолжении подачи рабочего тела в бесштоковую полость 11 и подаче его в полость 16 моментного цилиндра, После поворота штока 4 с держателем 5 в нужную сторону подача рабочего тела в бесштоковую полость 11 прекращается, в результате продолжающейся подачи его в штоковую полость 10 поршень 2 вместе со штоком 4 под давлением рабочего тела, заполняющего штоковую полость 10, опускается и занимает крайнее нижнее положение, при котором фиксатор 7 входит в одно из отверстий 8 крышки 9,Формула изобретения Модуль движения робота, содержащий рабочий орган, силовой цилиндр, имеющий гильзу с крышками, поршень и шток, установленный в поршне с возможностью поворота, моментный цилиндр, имеющий уплотнительную перегородку и лопасть, жестко закрепленную на штоке силового цилиндра и примыкающую к плоскости поршня, а также фиксатор, о т л и ч а ю щ и й с я тем, что, .целью упрощения конструкции путем совмещения функций отдельными злеметами модуля, уплотнительная перегородка размещена в штоковой полости силового цилиндра и жестко закреплена на его крышке с возможностью образования кольцевой полости моментного цилиндра при выдвинутом положении штока силового цилиндра,1646847 А-А г.2 Составитель С,НовикМ,Стрельникова Техред М,Моргентал Корректор Т,Ко Редакт аз 1643 Тираж 474 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская,наб., 4/5 оизводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 10
СмотретьЗаявка
4699676, 31.05.1989
ПРЕДПРИЯТИЕ ПЯ Г-4651
ПОТОЦКИЙ ПЕТР ПЕТРОВИЧ
МПК / Метки
МПК: B25J 9/08
Метки: движения, модуль, робота
Опубликовано: 07.05.1991
Код ссылки
<a href="https://patents.su/3-1646847-modul-dvizheniya-robota.html" target="_blank" rel="follow" title="База патентов СССР">Модуль движения робота</a>
Рабочее тело для стержневого смесителя

Номер патента: 1766683
Опубликовано: 07.10.1992
Авторы: Костылев, Лаане, Семченко
МПК: B28C 5/20
Метки: рабочее, смесителя, стержневого, тело
...вес которого отличается от веса стержня. Таким образом достигается смещение центра тяжести рабочего тела относительно его осн. бил,металлический стержень, выполнено в аиде трубчатой оболочки, эксцентрично расположенного в ней полого или сплошного стержня и размещенного между ними металлйческогозаполни, еля, аес которого отличен от веса стержня,На фиг.1 изображен стержневой смеси- тель; на фиг,2 - разрез АА на фиг,1; на Ниг,3 - поперечное сечение рабочего тела с полым стержнем; на Ниг,4 - поперечное сечение рабочего тела со сплошным стержнем; нг фиг,5 - продольный разрез рабочего тела; на фиг,б - принцип работы смесителя с у азанным рабочим телом,Рабочее тело 1 стержневого смесителя состоит из трубчатой оболочки 2, внутри...
Самоуплотняющийся поршень к пневматическому цилиндру

Номер патента: 143285
Опубликовано: 01.01.1961
Автор: Лившиц
МПК: F16J 1/00, F16J 15/40
Метки: пневматическому, поршень, самоуплотняющийся, цилиндру
...полость 1 цилиндра 2 через зарядный клапан 3 закачивается газ Гидравлическое уплотнение между цилиндром 2 и штоком 4, а также между поршнем и цилиндром состоит из кольцевого плунжера б, буксы б и клапана 7, через который в полость 8 закачивается уплотняющая жидкость. В кольцевом плунжере просверлено несколько отверстий 9, ведущих в кольцевую проточку 10, Кольцевой плунжер представляет собой стакан, внешняя и внутренняя цилиндрические поверхности которого уплотнены резиновыми кольцами 11.,Лавление в полости 8 будет равно давлению газа в полости 1, умноженному на постоянную величину, равную отношению кольцевой площади Рк кольцевой площади Рг,лагаемый самоуплотняю143285Предложенный поршень обеспечивает высокую герметичность...
Устройство для подачи рабочего тела

Номер патента: 249943
Опубликовано: 20.04.2006
Авторы: Гуськов, Захаревич, Набока, Никифоров
МПК: F02K 9/56
1. Устройство для подачи рабочего тела преимущественно в корректирующие и стабилизирующие двигатели космических аппаратов с большой продолжительностью полета, содержащее нагнетающий рабочее тело агрегат и систему трубопроводов с редукционными, электромагнитными и обратными клапанами, отличающееся тем, что, с целью уменьшения веса устройства, в нем подающий рабочее тело агрегат выполнен в виде камеры сгорания с установленным в ней поршнем, кинематически связанным с размещенным в цилиндре подпружиненным поршнем, надпоршневая полость которого сообщена со входом однокомпонентного рабочего тела и через обратный клапан - с полостью гидроаккумулятора, при этом последняя сообщена и с камерой...
Устройство для подвода рабочего тела к механизму

Номер патента: 1622223
Опубликовано: 23.01.1991
МПК: B63H 25/42, B63H 3/04, B63H 3/06
Метки: механизму, подвода, рабочего, тела
...система состоит из шарнирно связанных между собой рычагов 4. а свободные их концы связаны со штуцерами 5 питающей магистрали. Рычаги 4, оси 3 и корпус 1 выполнены с каналами, при этом каналы корпуса 1 сообщаются с продольными каналами штанги 2 для подвода рабочего тела к исполнительному механизму двигателя, Внутри расточки штанги 2 размещен поршень 6, разделяющий расточку на две полости - А и Б. В полостях А и Б в продольном направлении расположены фиксаторы лопасти, выполненные в виде невозвратных подпружиненных клапанов 7 и 8, при этом поршень 6 при наличии давления рабочего тела в одной полости, например А, взаимодействует со штоком 9 клапана 8, расположенного в соседней полости Б.Устройство работает следующим...
Рабочее тело термодинамического цикла для силовой энергетической установки

Номер патента: 282341
Опубликовано: 01.01.1970
Авторы: Лавренченко, Лось, Одесский, Холодильной, Чайковский
МПК: F01K 25/06
Метки: рабочее, силовой, тело, термодинамического, установки, цикла, энергетической
...ом давлении и переьная объемная протела, состоящего нз ого выше, чем у воее значения для чиело целесообразно няя часть которого ерхкритнческнх темасти насыщения. П изобретения Рабочее силовой э О парогазов юи(ееся те тивности показател 80 - 85% 5 (11 О) для ле при перИзобретение может быть использовано в паросиловых илн газотурбинных установках с полной или частичной конденсацией пара рабочего тела.Известно использование в качестве рабочего тела для силовых установок термостойких низкокипящих веществ, например углекислоты. Однако газообразная углекислота имеет низкие значения коэффициентов теплоотдачи к теплообменным поверхностям регенератора в надкритической области. Использование же в качестве рабочего тела водяного пара имеет тот...
Предыдущий патент: Модуль резонансного манипулятора
Следующий патент: Модуль поворота манипулятора
Случайный патент: Штамп последовательного действия