Патенты с меткой «роботом»
Устройство для записи программы контурного управления промышленным роботом

Номер патента: 930255
Опубликовано: 23.05.1982
Авторы: Коротун, Котыхин, Линкин, Сергацкий
МПК: G05B 19/00
Метки: записи, контурного, программы, промышленным, роботом
...подвижного контакта в первоначальное ( нулевое) положение и замыканием второго ключа 8 сбрасывающегоэлемент 6 памяти в нулевое положение.Отсутствие сигнала на выходе элементаИЛИ 10 и останов при этом привода 13программоносителя свидетельствует о том,что выходное звено 2 достигло нового положения, занимаемого органом 1 управления по всем осям координат робота,Перемещение выходного звена 2происходит по прямолинейной траектории.Применение изобретения позволит значительно упростить устройство для записипрограммы контурного управления промышленным роботом,Устройство работает следующим образом.В исходном положении первые ключи 7 разомкнуты, орган 1 управления находит ся относительно выходного, звена 2 робота в нулевом...
Устройство для программного управления промышленным роботом

Номер патента: 930257
Опубликовано: 23.05.1982
Авторы: Агапов, Кнауэр, Шульга
МПК: G05B 19/00
Метки: программного, промышленным, роботом
...блок сравнения, цифро-аналоговый преобразователь, привод и датчик положения, выход котрого подключен к первому входу первогоблока сравнения, о т л и ч а ю щ е е -с я тем, что, с целью расширения функциональных возможностей устройства,оно содержит одновибратор, первый ключ,последовательно соединенные инвертор,второй ключ и реверсивный счетчик, атакже последовательно подключенныетретий ключ и второй блок сравнения,второй вход которого соединен с входомустройства, а выход - с вторым входомпривода, первый выход пульта обученияподключен к первому входу третьего ключа и входам инвертора и одновибратора,выходом соединенного с первым входомпервого ключа, второй вход которого подключен к выходу датчика положения, авыходк первому входу...
Устройство для управления промышленным роботом

Номер патента: 930258
Опубликовано: 23.05.1982
Автор: Ольховский
МПК: G05B 19/00
Метки: промышленным, роботом
...наличие сложныхвычислительных блоков.Цель изобретения - улучшение акопулуатационных характеристик устройства.Дель достигается тем, что устройствосодержит дополнительно первый и второйдатчики расстояния до объекта, датчикскорости и блок вычисления скоростн,первый вход которого соединен с четвертым выходом блока задания программы,второй вход - с выходом второго даъ5 9302 ду второго сумматора, последовательно соединенные третьи сумматор н привод, связанный с третьим исполнительным механизмам и вторым датчиком перемещения, последовательно соединенные чеч вертые сумматор и привод, связанный с четвертым исполнительным механизмом и третьим датчиком перемещения, а также блок задания программы, первый, второй и третий выходы которого под О...
Цикловая система программного управления промышленным роботом
Номер патента: 935877
Опубликовано: 15.06.1982
МПК: G05B 19/00
Метки: программного, промышленным, роботом, цикловая
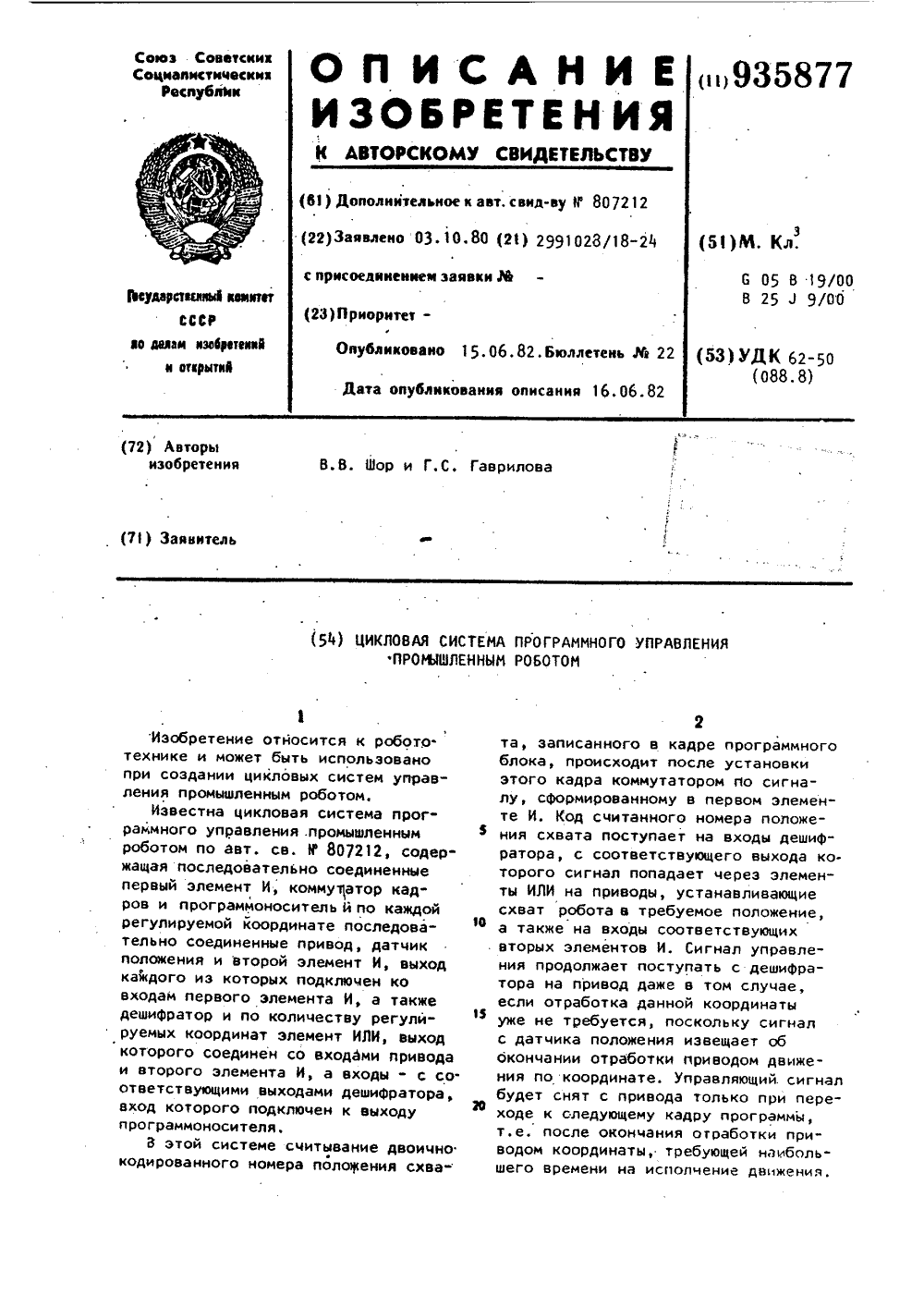
...93Это является недостатком системы,так как ве 4 ет к увеличению потребления энергопитания приводов и соответственно к снижению ресурса их работы и надежности системы в целом,Цель изобретения - повышение на.-,дежности и снижение энергопотдебления системы.Сущность изобретения заключаетсяв том, что система содержит по каждой регулируемой координате инвертор и третий элемент И, через который выход элемента И подключен ковходу привода, а выход датчика положения через инвертор соедийен совторым входом третьего элемента И,На чертеже представлена функциональная схема системы,Система содержит первый элементИ 1, коммутатор 2 кадров, программоноситель 3, дешифратор 1, элементыИЛИ 5, третьи элементы И 6, приво,ды 7, датчики 8 положения,...
Цифровая система программного управления роботом манипулятором
Номер патента: 943644
Опубликовано: 15.07.1982
Авторы: Антоненко, Коротун, Тимошенко
МПК: G05B 19/00
Метки: манипулятором, программного, роботом, цифровая
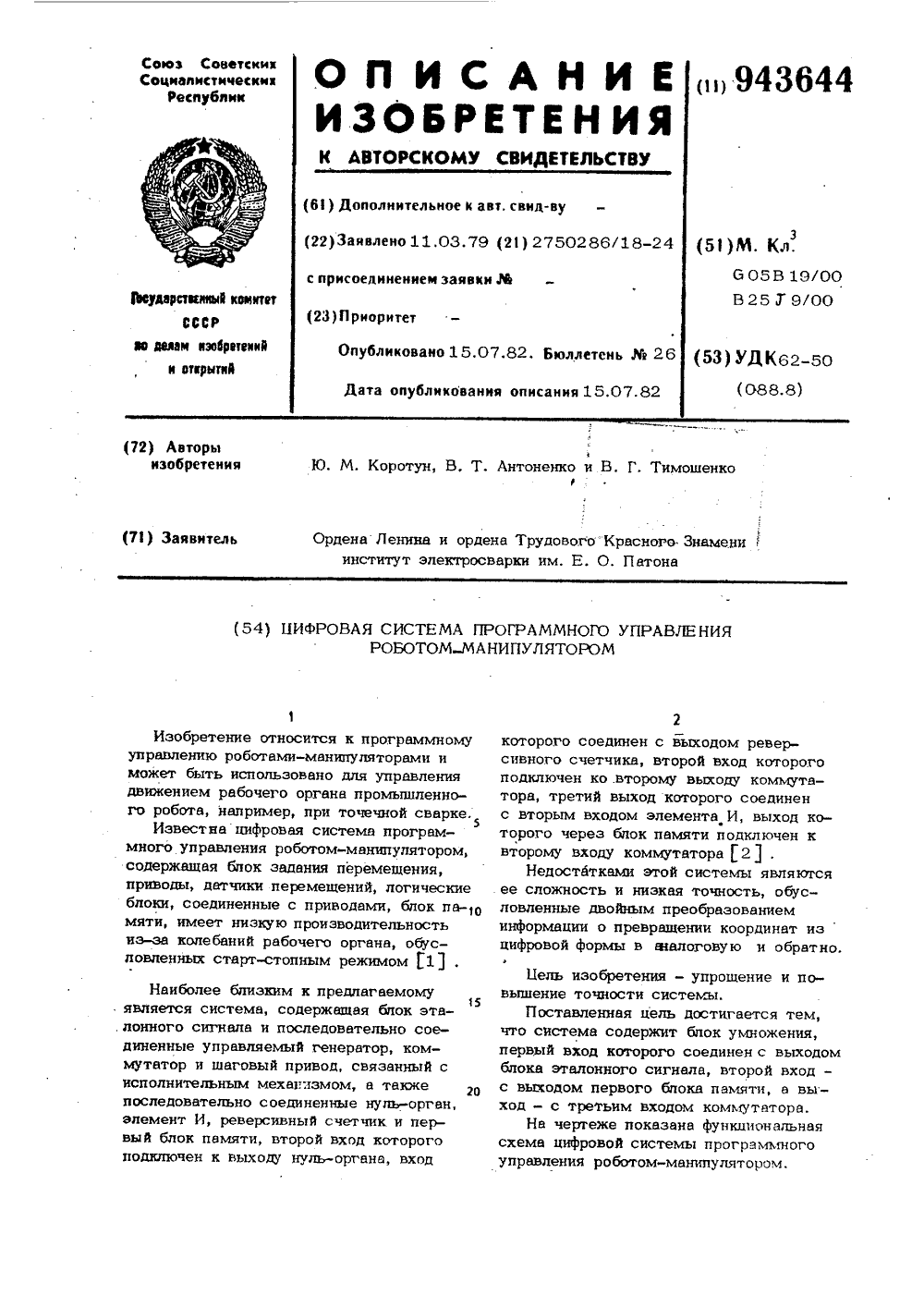
...одновременно на привод 3 и реверсивный счетчик 11, вкотором происходит алгебраическое суммирование информации о перемещениях по данной координате, Чтобы перенести информацию из реверсивного счетчика 11 в блок 6 памяти оператор запускает блок 8 эталонного сигнала, выполненного в виде управляемого по частоте генератора, частота импульсов на выходе которого изменяется оптимальным в смысле какого-либо критерия образом, например, оптимальным в смысле быстродействия исполнительного органа. Частота импульсов блока эталонного сигнала 8поступает в блок умножения 9, где умножается на код, хранящийся в блоке запоминания амплитуды 10, выполненного в виде регистра числа и представляющий собой информацию о величине приращения по данной...
Устройство для управления очувствленным роботом

Номер патента: 954921
Опубликовано: 30.08.1982
МПК: G05B 11/00
Метки: очувствленным, роботом
...импульс определенной длительности, который подается на второй элемента И 16 и разрешает прохождение импульсов с выхода приемника 3 чувствительного элемента 1 на вход сцетчика О импульсов. Длительность импульса Формирователя 6 определяет постоянную времени, в тецение которого будет поступать информация с приемника З,.которая дает значение высоты предмета в данной точке измерения.Источник 2 радиоактивного излучения излуцает кванты ионизирующего излучения, которые, отразившись от поверхности или от предмета регистрируются приемником 3 излучения, Последний преобразует кванты излуцения в электрические импульсы, которые формируются в приемнике 3 по длительности и амплитуде и подаются через элемент И 16 на счетчик 8. Количество импульсов,...
Устройство для управления промышленным роботом

Номер патента: 970320
Опубликовано: 30.10.1982
Авторы: Гурский, Линкин, Лихошва, Сергацкий
МПК: G05B 19/00
Метки: промышленным, роботом
...ним добавляется дополнительное число импульсов из второго реверсивного счетчика 12, соответствующее фактической величине люфта данной оси координат в данной точке и 35в данное время. Триггер 7 работаеттаким образом, что добавление импульсов из второго реверсивного счетчика 12 осуществляется только в техточках, направление последнего пе Оремещения в которых при позиционировании не совпадает с направлениемперемещения в интервале между данной и предьЩущей точками. Триггер 7устанавливается вместе с Формирователем 8 импульса в нулевое состояниепо окончании каждого цикла позиционирования по сигналу записи с блока 1обучения, поступающему через элемент9 задержки, Он изменяет свое состояние только при изменении направления перемещения по данной...
Устройство управления промышленным роботом

Номер патента: 970323
Опубликовано: 30.10.1982
Авторы: Грузинцев, Данилов, Левин, Лудиков
МПК: G05B 19/43
Метки: промышленным, роботом
...обратной связи блока 56датчиков, на отдельный ряд 63 - выходы всех промежуточных датчиков роботаи технологического оборудования 57 ина отдельный ряд 65 выведены все вхоЯды и выходы двухвходовых схем И блока 58. На фиг. 3 показана траектория движения схвата 3 робота, управляемого предлагаемым устройством, .где 66 матрица штампа, а 67 и 68 - направляющие колонки пуансона, которые схват 3 робота должен обойти при движении из 23 6точки 69 в точку 79. На Фиг4 график о показывает зависимость пройденного пути ь по выдвижению от времени 1, граик 5) - угла поворота Ч отвремени 1 .Устройство работает следующим образом.В наладочном режиме осуществляется ручное управление от кнопок блока 52 режимов и ручного управления силовыми ключами блока 54...
Устройство для управления сборочным роботом

Номер патента: 989534
Опубликовано: 15.01.1983
Авторы: Егоров, Кравченко, Лакота
МПК: G05B 11/00
Метки: роботом, сборочным
...управления Работа через элемент И бначинает движение координата 2 5 впрямом направлении. При контакте деталей сигнал с датчика 1.0 моментачерез элемент И 7 обеспечивает обработку приводом координаты 2 5 заданного сборочного усилия черезэлемент И 7. Этот же сигнал включаетв работу через элементы И б и 7 координаты Х 3 и У 4. Исходя из исходной схемы, начинает движение канал 30Х 3 в прямом направлении. При фиксации останова координаты Х 3 сигналс датчика 10 момента через элементИЛИ 13 перебросит триггеры 14 и 15в другое состояние, Сигнал с их прямых выходов через элемент И 7 приводит в движение координату Х 3 в обратном направлении. При следующемупоре любой из датчиков 10 моментакоординат Х 3 и У 4 перебросит через 40элемент ИЛИ 13...
Устройство для управления адаптивным роботом

Номер патента: 1004972
Опубликовано: 15.03.1983
МПК: G05B 19/40, G05B 19/402
Метки: адаптивным, роботом
...та 5, когда перекрыт луч фотодатчика2, схват перемещается со скоростью Ф 2. После открытия луча фотодатчика 2 приэтом и центр схвата и центр 0 пред 45 мета 5 оказываются на расстоянии Н = =- ОА-ЙЯ от точки А. Теперь предмет 5 и схват двигаются со скоростью Ч и их центры совмещаются в тачке А. Однако, когда предмет 5 перекрывает луч фотодатчика 3, его центр 0 и и центр схвата отстоят от точки А на расстоянии г, и поэтому команда У на захват предмета 5 должна выдаваться после того, как предмет 5 и схват еше пройдут путь, ровный г . Радиус г вычисляется при перекрытии предметом луча фотодатчика 2. Число импульсов, прошедших за 972 4этот промежуток времени с датчика 1, пропорционально 2% (отрезок 00= ф 2 У 2 г ) Радиус определяется...
Устройство для управления промышленным роботом

Номер патента: 1029136
Опубликовано: 15.07.1983
Авторы: Глейзер, Зверев, Кнауэр
МПК: G05B 11/00
Метки: промышленным, роботом
...черезрегулятор момента подключен к входунуль-органа и выходу сумматора, авыход - к второму входу регуляторатока, третьим входом соединенного свыходом первого ключа, первый входкоторого подключен к выходу регулятора скорости, а второй вход - квыходу элемента памяти, вторым входом соединенного через дифференциатор с выходом задатчика положения,Начертеже представлена функциональная схема предлагаемого устройства; Схема включает задатчик 1 положения, сумматор 2, регулятор 3 положения, регулятор 4 скорости, первый ключ 5, регулятор б тока, усили-,тель 7 мощности, двигатель 8, датчик 9 тока, датчик 10 скорости, датчик 11 положения, нуль-орган 12,элемеит 13 памяти, инвертор 14, второй ключ 15, дифференциатор 16, регулятор 17 момента.Устройство...
Устройство для циклового управления промышленным роботом

Номер патента: 1037211
Опубликовано: 23.08.1983
Авторы: Гаврилова, Зверев, Ивойлов, Кнауэр, Шор
МПК: G05B 19/08
Метки: промышленным, роботом, циклового
...вторым датчиками конечного положения, выходы которых через соответствушие элементы И подключены к первому 20и второму входам элемента ИЛИ, выходомсоединенного через коммутатор кадровс входом блока задания программы, выходкоторого подключен к второму входу пер-,вого элемента И, а также второй распре делитель, входом соединенный с вторымвходом второго элемента И, а выходомс вторым входом пневмопривода 2 ) .Недостатками известного устройстваявляются большие габариты и сложностьблока задания программы.11 ель изобретения - упрощение устройства,Поставленная цель достигается тем,что устройство содержит элемент.НЕ,через который выход блока задания программы соединен с входом второго распределителя,На чертеже представлена функциональная...
Устройство для управления очувственным роботом

Номер патента: 1068887
Опубликовано: 23.01.1984
МПК: G05B 11/00
Метки: очувственным, роботом
...предмета 19 на рабочейпонерхности уровень сигнала на выходе приемника 3 увеличивается засчет уменьшениярасстояния междуприемником 3 излучения и предметом19. Уровень порогового элемента 4выбран. таким, что при превышениисигналом на выходе приемника 3 этогоуровня, элемент 4 срабатывает и сего выхода снимается потенциал, который открывает вход элемента И 15.Потенциал на выходе элемента 4 изменяется только тогда, когда предмет19.выйдет из эоны действия приемника 3. Приемник 3 излучения и источник 2 излучения,коллимиоованы так,чтобы обеспечить необходимую разрешающую способность по контуру предмета 19,При срабатывании элемента 4 импульсы с генератора 18 импульсов поступает через элемент И 15 и элемент7 ЗАПРЕТ на входы ключей 16 и...
Устройство для управления сборочным роботом

Номер патента: 1075233
Опубликовано: 23.02.1984
Авторы: Егоров, Кобзев, Кравченко, Сомин
МПК: G05B 19/00
Метки: роботом, сборочным
...Е при перемещении при-.вода 2 и контакте деталей 18 и 19в зоне фаски фаска всегда превышает максимально возможное присборке отклонение осей сопрягаемых деталей) срабатывает блок 15переключения координатОн размыкает ключ 9 в цепи ошибки привода 2и дает расрешение на работу блока 16 для управления перемещениямиприводов 3 и 4 координат Х и 1 икоммутатора 17 следующим образом.Когда происходит останов привода 2при несобираемости деталей 18 и 19,возрастает ток якоря двигателя 11привода 2, на выходе пороговогоэлемента 20 формируется "1", и срабатывает триггер 21, устанавливаясьв единичное состояние. В результатеразмыкается ключ 9 привода 2, подается сигнал разрешения на работублока 16 за счет подачи сигнала навходы его триггеров 35 и 36,и...
Устройство для управления очувствленным роботом

Номер патента: 1084724
Опубликовано: 07.04.1984
МПК: G05B 11/00
Метки: очувствленным, роботом
...второй каретке вторые источник и приемник излучения, одно- вибратор, третий привод, последовательно соединенные второй элемент ИЛИ и четвертый привод, а также последовательно включенные блок сравнения, нуль-орган и третий элемент И, выход которого соединен с выходом устройства, а второй вход через одновибратор - с выходом формирователя импульса и входом второго приемника излучения, подключенного выходом к первому входу блока сравнения, второй вход которого соединен с выходом первого приемника излучения, выходы первого и второго элементов И подключены к соответствующим входам второго элемента ИЛИ, выход второго двоичного умножителя соединен с входом треть его привода,связанного с второй кареткой, связанной также с четвертым приводом.На...
Устройство для управления сборочным роботом

Номер патента: 1091115
Опубликовано: 07.05.1984
Авторы: Егоров, Кравченко, Лакота
МПК: G05B 11/00
Метки: роботом, сборочным
...первого коммутатора, второй вход второго сумматора соединен с выходом датчика усилия, а выход черезпоследовательно включенные первыйинвертор и третий сумматор - с входом элемента с односторонней проводимостьюь введены третий усилитель, первый ограничитель и последовательно соединенные второй ограничитель, второй инвертор и элемент И,а также последовательно включенныетретий инвертор и второй коммутаторвторой вход которого подключен квходу третьего инвертора и выходузадатчнка скорости, третий вход -к выходу элемента И с одностороннейпроводимостью, а выход - к второмувходу первого сумматора, соединенного первым входом с входом второго ограничителя, выход датчика усилия подключен к. входу первого ограничителя, выход которого соединен.с...
Устройство для управления роботом технологического конвейера

Номер патента: 1096609
Опубликовано: 07.06.1984
Авторы: Ерош, Жаботинский, Силин
МПК: G05B 19/00
Метки: конвейера, роботом, технологического
...Схема устройства,Устройство содержит блок 1 фотодатчиков, схват 2 исполнительногооргана, ленту 3 конвейера, деталь 4,направляющие 5, логический блок 6,второй коммутатор 7, нуль-орган 8,элемент И 9, генератор 10 тактовьмимпульсов, счетчик 11, первый комму 2о татор 12, блок 3 управления, датчик 14 усилия схвата, пороговый элемент .15, пульт 16 управления, блок 17 памяти, блок 18 сравнения и приводы 19 исполнительного органа робота.Устройство работает следующим образом.На этапе обучения оператор с пулье та 16 управления вносит в блок 17 памяти информацию о коде сигналов блока 1 фотодатчиков для каждого фиксированного положения детали 4,угле поворота и горизонтальном перемещении схвата 2, соответствующем данно. му коду, а затем переключает...
Устройство управления промышленным роботом

Номер патента: 1104311
Опубликовано: 23.07.1984
Автор: Черников
МПК: F15B 21/02
Метки: промышленным, роботом
...17и 18, исполнительные гидроцилиндры 19-21, мерный 22 и управляющий 23 гидроцилиндры, привод 24 программатора, гидроаккумулятор 25 игидрокомпенсатор 26.Гидроцилиндры-дозаторы 17 и 18имеют подпружиненные поршни 27 и 28.Они соединены гидролиниями с гидрораспределителями 3 и 7, на плунжерахкоторых закреплены постоянные магниты 29 и 30. Гидрораспределители 3и 7 подсоединены к напорной гидролинии насоса 1 низкого давления. Слив 25жидкости из гидроцилиндров-дозаторов 17 и 18 и управляющего гидроцилиндра 23 может осуществлятьсячерез гидрораспределители 9 и 12в гидрокомпенсатор 26,30Мерный гидроцилиндр 22 снабженпружиной 31. Его штоковая полостьсоединена со сливными гидролиниямиисполнительных гидроцилиндров 19,20 и 21 через обратный...
Устройство для управления адаптивным роботом

Номер патента: 1115015
Опубликовано: 23.09.1984
Автор: Белов
МПК: G05B 11/00
Метки: адаптивным, роботом
...которого подключен к выходу датчика скорости конвейера и к вторым входам первого и второго элементов И, а выход - к второму входу элемента ЗАПРЕТ, выходом соединенного с первым выходом устройства, выход первого фото- датчика подключен к второму входу первого триггера, выход первого элемента НЕ соединен с вторым входом второго триггера, выход второго элемента НЕ подключен к второму входу третьего элемента И, выход которого соединен с вторым выходом устройства, выходы реверсивного счетчика подключены к входам элемента ИЛИ, выход которого соединен с третьим входом второго элемента И, а первый источник излучения оптически связан с пер. вым и вторым фотодатчиками, введены второй источник излучения и последовательно соединенные третий...
Устройство для контроля блока управления роботом

Номер патента: 1119018
Опубликовано: 15.10.1984
Авторы: Гладштейн, Гуревич, Комаров, Сахаров, Шубин
МПК: G06F 11/28
Метки: блока, роботом
...осуществляется следующим образом,На адресный вход устройства и,соответственно, на второй вход схемы сравнения 6 поступает в -разрядный код адреса степени свободы. Величины ь и М связаны соотношениемМ = 2 . На первый вход схемы 6 сравнения поступает контрольный кодстарших разрядов второго (ь+1)-разрядного счетчика 2, указывающий номер обслуживаемой степени объекта.При совпадении кода адреса с контрольным кодом схемы 6 сравнения срабатывает и на ее выходе появляется. сигнал, открывающий элемент И 3.В процессе обращения к адресуемойстепени свободы первый и второйпрограммные синхросигналы поочередно поступают на второй элемент ИЛИ 5,55с выхода которого через открытый элемент И 3 подаются на счетный входвторого счетчика 3 и увеличивают 018...
Устройство для управления адаптивным роботом

Номер патента: 1121645
Опубликовано: 30.10.1984
Автор: Белов
МПК: G05B 11/00
Метки: адаптивным, роботом
...2, предмет 3, датчик 4 скорости конвейера, первый фотодатчик 5, второй Фотодатчик 6, элемент И 7, первый элемент ЗАПРЕТ 8, первый триггер 9, второй элемент ЗАПРЕТ 10, счетчик 11, второй триггер 12, третий элемент ЗАПРЕТ 13, третий триггер 14, четвертый элемент ЗАПРЕТ 15, четвертый триггер 16,Ъ - выходные сигналы устройства; Ч - скорость конвейера с предметом.Устройство работает следующим образом. Перемещаемые конвейером предметы3 должны обладать тем свойством,что их центры совпадают с центрамиописанных вокруг них окружностей.В исходномположении центр схватаробота находится в точке Л над Фотодатчиком б. Конвейер 2 перемещаетсо скоростью Ч предмет 3. Принципнаведения схвата на центр предмета3 заключается в том, что схват, перемещаемый...
Система управления промышленным роботом

Номер патента: 1127767
Опубликовано: 07.12.1984
Автор: Колискор
МПК: B25J 13/00
Метки: промышленным, роботом
...звеньями 1, соединенными между собой вращательными кинематически ми парами 2, каждаяиз которых имеет привод, и конечным зве Оном 3 схватом, содержит блок 4 программы, количество выходов которого соответствует кол ичеству приводных звеньев 1.Каждый из выходов блока 4 программысвязан с одним из входов соответствующихдвухвходовых сумматоров 5, выходы кото 55рых связаны с приводами соответствующихзвеньев 1 робота. Система управления снабжена измерителем б текущих параметров положения конечного звена 3 в пространстве, двумя специализированными вычислительными блоками 7 и 8, шестью блоками 9 сравнения, причем каждый выход блока 4 программы дополнительно связан с. соответствующим входом первого специализированного вычислительного блока 7,...
Устройство для управления адаптивным роботом

Номер патента: 1130829
Опубликовано: 23.12.1984
Авторы: Жаботинский, Машинин, Силин
МПК: G05B 11/00
Метки: адаптивным, роботом
...последовательно соединенные датчик наличия детали, формирователь импульса,элемент задержки и дешифратор, а также направляющий стопор с упором иЗОкронштейнами, на которых установленыдатчик наличия детали, источники излучения и Фотодатчики, выходы которыхсоединены с входами блока формирователей импульсов, подключенного выходами к вторым входам дешифратора, вы" З 5ходы которого соединены с выходамиустройства, выход формирователя импульса подключен к первому входу ключа, соединенного вторым входом с выходом источника питания, а выходом -с входом источников излучения,На чертеже представлена Функциональная схема устройства.Устройство содержит Фотодатчики 1,5 корпус 2, источники 3 излучении, направляющий стопор 4, кронштейн 5, конвейер б, упор....
Устройство для управления адаптивным роботом

Номер патента: 1140093
Опубликовано: 15.02.1985
Автор: Жаботинский
МПК: G05B 11/00
Метки: адаптивным, роботом
...источника питания соответственно, пятый вход - с выходом первого датчика контакта, а первый и второй выходы - с соответствующими входами второго привода, связанного сдатчиком усилия.На фиг. 1 представлена функциональная схема устройства; на фиг.2 -схема разрешения механических эле-.ментов,Устройство содержит блок 1 датчиков, первый элемент ИЛИ 2, первыйэлемент 3 задержки, первый коммутатор 4, первый привод 5, датчик 6усилия, пороговый элемент 7, второйи третий элементы 8 и 9 задержкисоответственно, второй коммутатор 10,второй привод 11, первый датчик 12контакта, первый источник 13 питания, элементы И 14, регистр 15, блок16 памяти, выходы 17 устройства, второй и третий датчики 18 и 19 контак,та соответственно, второй элементИЛИ 20,...
Устройство для управления адаптивным роботом

Номер патента: 1150616
Опубликовано: 15.04.1985
МПК: G05B 19/00
Метки: адаптивным, роботом
...усилитель 14, второй привод 15, второй датчик 16 положения, третий усилитель 17, третий привод 18, третий датчик 19 положения, источник 20 опорного сигнала, первый и второй сумматоры 21 и 22 соответственно, первые, второйи третий нуль органы 23, 24 и 25 соответственно, первый элемент И 26, первый и второй ключи 27 и 28 соответственно, второй элемент И 29, 3 1150 третий и четвертый ключи 30 и 31 соответственно, пороговый элемент 32,Устройство работает следующим образом.С блока 2 задания программы на 5 приводы 5 исполнительного органа 12 и приводы 15 и 18 каретки 1 подают - ся сигналы, по которым схват 6 и каретка 1 выходят в заданное программой положение. Отработка программы осуществляется в следящем режиме путем сравнения заданного...
Устройство для управления сборочным роботом

Номер патента: 1151924
Опубликовано: 23.04.1985
Авторы: Горчаков, Егоров, Кобзев
МПК: G05B 11/00
Метки: роботом, сборочным
...органа. При этом привод работает в старт-стопном режиме.Целью изобретения является улучшение динамических характеристик устройства.Цель достигается тем, что в устройство, содержащее задатчик скорости и задатчик усилия, выход которого соединен с первым входом первого сумматора, подключенного вторым входом к выходу датчика усилия, а также последовательно соединенные второй сумматор, блок управления и привод, кинематически связанный . грез исполнительный механизм с датчиком усилия и датчиком скорости, выход которого подключен к первому входу второго сумматора, дополнительно введены последовательно соединенные нелинейный элемент, интегратор и блок умножения, второй вход которого подключен к выходу задатчика скорости, выход - к...
Цикловая система программного управления промышленным роботом

Номер патента: 1151927
Опубликовано: 23.04.1985
Авторы: Аношкин, Афанасьев, Винник, Шевченко
МПК: G05B 19/00
Метки: программного, промышленным, роботом, цикловая
...по каждой регулируемой координате дополнительно КЬ-триггера и четвертого элемента И позволяет исключить выдачу разрешающего сигнала с выхода второго элемента И на вход первого элемента И по регулируемой координате схвата робота, в которой произошел отказ датчика положения.На чертеже представлена функциональная схема предлагаемой системы.Система содержит первый элемент И 1, коммутатор 2 кадров, программоноситель 3, дешифратор 4, элементы ИЛИ 5, третьи элементы И 6, приводы 7, датчики 8 положения, вторые элементы И 9, инверторы 10, четвертые элементы И 11, Ю-триггер 12.50 55 Выход первого элемента И 1 соединен через коммутатор 2 с программоносителем 3, выход которого через дешифратор 4 соединен с входами элемента ИЛИ 5 по каждой...
Устройство для управления промышленным роботом
Номер патента: 1170428
Опубликовано: 30.07.1985
Авторы: Коломенцев, Кузнецов, Фурман
МПК: B25J 9/00, G05B 19/00
Метки: промышленным, роботом
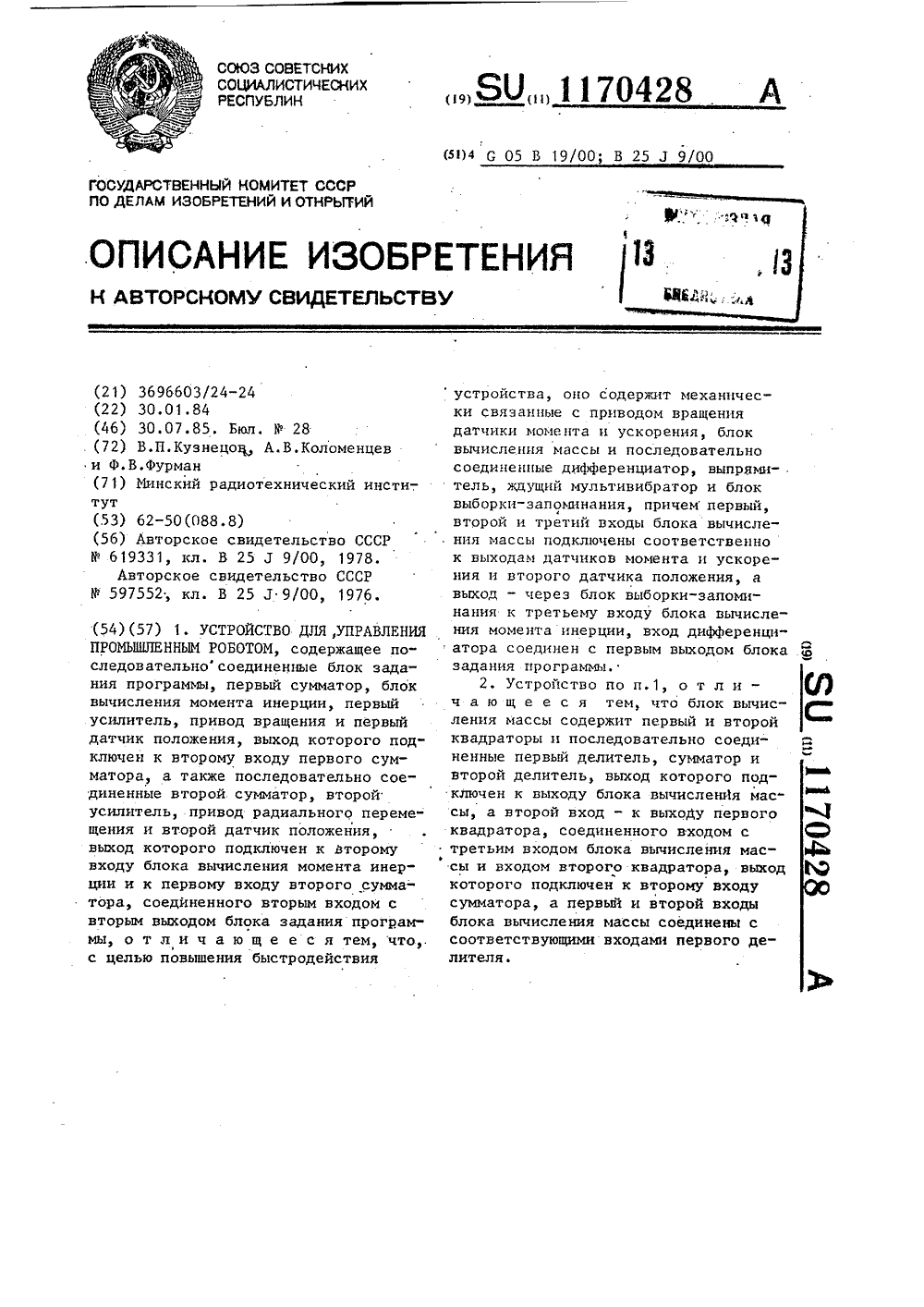
...7, второй усилитель 8, 20привод 9 радиального перемещения,второй датчик 10 положения, датчик 11момента, датчик 12 ускорения, блок 13вычисления массы, дифференциатор 14,выпрямитель 15, ждущий мультивибратор 2516, блок 17 выборки-запоминания..т,Блок вычисления массы (Иг.2)включает первый делитель 18, первый19 и второй 20 квадраторы, сумматор21 и второй делитель 22, 30На Фиг.З указаны функциональныйблок 23, суюатор 24, делитель 25 иблок 6 фиксации уровня,Устройство работает следующим образом.В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы;.на первом его выходе появится сигнал, соответствующий требуемому перемещению привода 40 5 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от...
Устройство для управления адаптивным роботом

Номер патента: 1188700
Опубликовано: 30.10.1985
Авторы: Анопреенко, Солодилин, Франко
МПК: G05B 19/00
Метки: адаптивным, роботом
...элемент И 13 имеет на выходе О, ключ 16 закрыт, триггер 8 установлен в нулевое состояние, ключ 15 открыт, С блока 12 запоминания программы подается команда на сжатие губок 2 схвата 1. Эта команда через открытый ключ 15 поступает на привод 9 сжатия губок 2, и они начинают сжиматься. Когда губки 2 схвата 1 коснутся детали 3, срабатывают тактильные датчики 11, элемент И 13, ключ 16 открывается и команда на подъем схвата 1 проходит от блока 12 через открытый ключ 16 на привод 10 подъема схвата 1, последний начинает подъем. Губки 2 схвата 1 продолжают сжиматься, сильнее охватывая деталь 3. Однако из-за недостаточного сжатия губок 2 деталь 3 проскальзывает в них, продолжая опираться на поверхность стола. По мере увеличения сжатия...
Устройство для управления сборочным роботом

Номер патента: 1200242
Опубликовано: 23.12.1985
Авторы: Дорохов, Егоров, Немонтов
МПК: G05B 19/00
Метки: роботом, сборочным
...фазу взаимного пере.коса (поисковые движения).В моменты времени, соответствующие крайним положениям в движении объекта, то есть,в положении упора подвижного объекта внеподвижный, взаимное перемещение ввиду заклинивания невозможно. При смене фазы упораподвижный сопрягаемый объект проходит черезположение, соответствующее промежутку междудвумя противоположными упорами, и тем самымоказывается свободным от силовых связей,налагаемых неподвижным объектом. В течениевремени, соответствующего движению междудвумя упорами подающего движения, производится аксиальное перемещение сопрягаемыхэбьектов, ошибка следящего привода 13 подаю.щего движения уменьшается, пороговый элемент11 возвращается в исходное состояние, и навыходе элемента И 2 вновь...