Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1115015
Автор: Белов



Текст
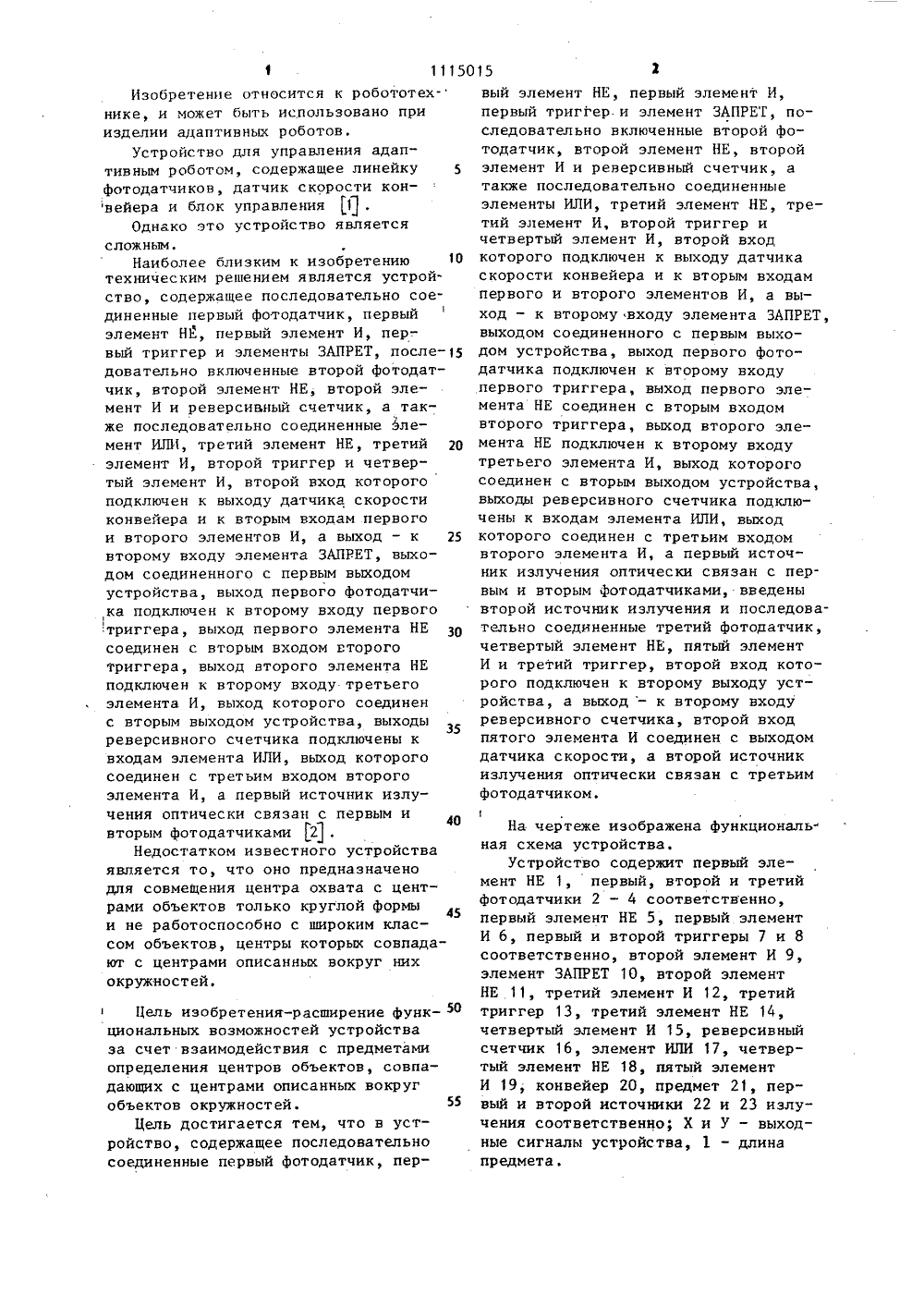
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 9) (11) 1) С О 5 В 11/О ПИСАНИ ЗОБ ТЕН ВИДЕТЕЛЬСТ К АВТОРСКО(21) (22) (46) (72) (71) го Кр инсти (53) Авторс 9, кл. вторско 28, кл. ип) .(прот юГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ 3509928/24-2418.10.8223,09,84 Бюл. И 35А.Г.БеловДальневосточный ордена Трудовоасного Знамени политехническийтут им. В.В.Куйбышева62-50(088.8) ое свидетельство ССС05 В 15/02, 1975.свидетельство СССР6 05 В 15/00, 1981(54)(57) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯАДАПТИВНЫМ РОБОТОМ, содержащее последовательно соединенные первый фотодатчик, первый элемент НЕ, первыйэлемент И, первый триггер и элементЗАПРЕТ, последовательно включенныевторой фотодатчик, второй элемент НЕ,второй элемент И и реверсивный счетчик, а также последовательно соединенные элементы ИЛИ, третий элементНЕ, третий элемент И, второй триггери четвертый элемент И, второй входкоторого подключен к выходу датчикаскорости и к вторым входам первогои второго элементов И, а выход - к второму Ъходу элементаЗАПРЕТ, выходом соединенного с первым выходом устройства, выход первого фотодатчика подключен к второму входу первого триггера, выход первого элемента НЕ соединен с вторым входом второго триггера, выход второго элемента НЕ подключен к второму входу третьего элемента И, выход которого соединен с вторым выходом устройства, выходы реверсивного счетчика подключены к входам элемента ИЛИ, выход которого соединен с третьим входом второго элемента И, а первый источник излучения оптически связан с первым и вторым фотодатчиками, о т л и ч а щ е е с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит второй источник излучения и последовательно соединенные третий фотодатчик, четвертый элемент НЕ, пятый элемент И и третий триггер, второй вход которо го подключен к второму выходу устрой ства, а выход - к второму входу реверсивного счетчика, второй вход пятого элемента И соединен с выходом датчика скорости, а второй источник излучения оптически связан с третьим фотодатчиком.Изобретение относится к робототехнике, и может быть использовано при изделии адаптивных роботов.Устройство для управления адаптивным роботом, содержащее линейку фотодатчиков, датчик скорости конвейера и блок управления 1 .Однако это устройство является сложным.Наиболее близким к изобретению 1 О техническим решением является устройство, содержащее последовательно соединенные первый фотодатчик, первый элемент НЕ, первый элемент И, пер-. вый триггер и элементы ЗАПРЕТ, последовательно включенные второй фотодатчик, второй элемент НЕ, второй элемент И и реверсиьный счетчик, а также последовательно соединенные элемент ИЛИ, третий элемент НЕ, третий 20 элемент И, второй триггер и четвертый элемент И, второй вход которого подключен к выходу датчика скорости конвейера и к вторым входам первого и второго элементов И, а выход - к 25 второму входу элемента ЗАПРЕТ, выходом соединенного с первым выходом устройства, выход первого фотодатчика подключен к второму входу первого триггера, выход первого элемента НЕ соединен с вторым входом второго Триггера, выход второго элемента НЕ подключен к второму входу третьего элемента И, выход которого соединен с вторым выходом устройства, выходы реверсивного счетчика подключены к входам элемента ИЛИ, выход которого соединен с третьим входом второго элемента И, а первый источник излучения оптически связан с первым и вторым фотодатчиками 2 .Недостатком известного устройства является то, что оно предназначено для совмещения центра охвата с центрами объектов только круглой формы и не работоспособно с широким классом объектов, центры которых совпадают с центрами описанных вокруг них окружностей,Цель изобретения-расширение функ О циональных возможностей устройства за счет взаимодействия с предметами определения центров объектов, совпадающих с центрами описанных вокруг объектов окружностей. 55Цель достигается тем, что в устройство, содержащее последовательно соединенные первый фотодатчик, первый элемент НЕ, первый элемент И, первый триггер.и элемент ЗАПРЕТ, последовательно включенные второй фотодатчик, второй элемент НЕ, второй элемент И и реверсивный счетчик, а также последовательно соединенные элементы ИЛИ, третий элемент НЕ, третий элемент И, второй триггер и четвертый элемент И, второй вход которого подключен к выходу датчика скорости конвейера и к вторым входам первого и второго элементов И, а выход - к второму входу элемента ЗАПРЕТ, выходом соединенного с первым выходом устройства, выход первого фото- датчика подключен к второму входу первого триггера, выход первого элемента НЕ соединен с вторым входом второго триггера, выход второго элемента НЕ подключен к второму входу третьего элемента И, выход которого соединен с вторым выходом устройства, выходы реверсивного счетчика подключены к входам элемента ИЛИ, выход которого соединен с третьим входом второго элемента И, а первый источник излучения оптически связан с пер. вым и вторым фотодатчиками, введены второй источник излучения и последовательно соединенные третий фотодатчик, четвертый элемент НЕ, пятый элемент И и третий триггер, второй вход которого подключен к второму выходу устройства, а выход - к второму входу реверсивного счетчика, второй вход пятого элемента И соединен с выходом датчика скорости, а второй источник излучения оптически связан с третьим фотодатчиком.На чертеже изображена функциональ. ная схема устройства.Устройство содержит первый элемент НЕ 1, первый, второй и третий фотодатчики 2 - 4 соответственно, первый элемент НЕ 5, первый элемент И 6, первый и второй триггеры 7 и 8 соответственно, второй элемент И 9, элемент ЗАПРЕТ 10, второй элемент НЕ 11, третий элемент И 12, третий триггер 13, третий элемент НЕ 14, четвертый элемент И 15, реверсивный счетчик 16, элемент ИЛИ 17, четвертый элемент НЕ 18, пятый элемент И 19, конвейер 20, предмет 21, первый и второй источники 22 и 23 излучения соответственно; Х и У - выходные сигналы устройства, 1 - длина предмета.3 11150Устройство работает следующим образом.В исходном положении центр ответа робота находится в точке С над источником 23, счетчик 16 и триггеры 7, 8 и 13 обнулены, сигналы Х и У также равны нулю, Конвейером 20 перемещается со скоростью Ч предмет 21. Принцип наведения схвата на центр предмета 21 заключается в том, что схват, пере О мещаемый приводом поперечной степени подвижности робота со скоростью Ч по катету СА, и предмет, двигаясь по катету ВА=СА равнобедренного треугольника САБ, встречаются в точ - 15 ке А.Но предмет перекрывает луч фото - датчика 2 раньше, чем его центр О окажется в точкеВ. Поэтому на отрезке О О движения центра предмета, 20когда перекрыт луч фотодатчика 2, схват перемещается со скоростью Ч(2. Вследствие этого после выхода предмета из-под луча фотодатчика 2 центр схвата и центр О предмета окажутИК ся на равном расстоянии АО от точки А. Теперь предмет и схват будут двигаться со скоростью Ч и их центры совместятся в точке А.Однако, когда предмет перекрываетлуч фотодатчика 3, его центр О и центр схвата отстоят от точки А на расстоянии АО , и поэтому команда У на захват предмета должна выдаваться после того, как предмет и схват еще пройдут путь АО =1(2. Отрезок АО вычисляется при перекрытии предметом луча фотодатчика 4. Число импульсов, пришедших за этот промежуток времени с датчика 1, пропорционально 1. 40(ОПоэтому отрезок АО определяется делением частоты импульсов на два,При перекрытии предметом 21 луча фотодатчика 4 на выходе элемента НЕ 18 появляется сигнал и импульсы с 45 датчика 1 через элемент И 19 и триггер 13 поступают на суммирующий вход счетчика 16. Так как триггер 13 де 15 4лит частоту входных импульсов на два, к моменту выхода предмета из-под луча фотодатчика 4 в счетчике 16 будет записан код числа, пропорционального 1/2. При перекрытии предметом луча фотодатчика 2 по сигналу с элемента НЕ 5 срабатывает триггер 8 и импульсы с датчика 1 через элемент И 15 и прямой вход элемента ЗАПРЕТ 10 идут по цепи 1 на привод поперечной степени подвижности робота.Одновременно, пока перекрыт луч фотодатчика 2, импульсы с датчика 1 через элемент И 6 поступают на счетный вход триггера 7, с выхода которого с вдвое меньшей частотой импульсы идут на инверсный вход элемента ЗАПРЕТ 10, вычеркивая каждый второй импульс, пришедший на его прямой вход. Схват робота при этом начинает двигаться из точки С вдоль луча СА со скоростью Ч/2.После выхода предмета из-под луча фотодатчика 2 импульсы датчика 1 через элемент И 6 не проходят на триггер 7, триггер 7 переводится сигналом в нулевое положение и кажрый импульс датчика 1 через элемент И 15 и элемент ЗАПРЕТ 10 проходит в цепь Х. Схват станет перемещаться со скоростью Ч.При перекрытии предметом луча фотодатчика 3 импульсы датчика 1 через элемент И 9 проходят на вычитающий вход счетчика 16. Когда счетчик обнулится, т.е. предмет и схват пройдут расстояние АО , через элементы ИЛИ 17,и(НЕ 14 и И 12 выдается сигнал У о совмещении центров схвата и предмета 21. Одновременно триггер 8 переводится в нулевое положение, прерывая управление приводом поперечной степени подвижности робота от устройства по цепи Х и управление передается системе программного управления роботом.1115015 Составитель Г,Нефедоедактор Т,Кугрышева Техред А,Ач Шар о о писн к тета ССС крыткая б., д. ППП "Патент" Ь 768/ЗЗ Т ВНИИПИ Государ по делам изо 113035, Москва
СмотретьЗаявка
3509928, 18.10.1982
ДАЛЬНЕВОСТОЧНЫЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
БЕЛОВ АРИСТАРХ ГЕОРГИЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: адаптивным, роботом
Опубликовано: 23.09.1984
Код ссылки
<a href="https://patents.su/4-1115015-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Число-импульсов множительное устройство

Номер патента: 602942
Опубликовано: 15.04.1978
Авторы: Горбачев, Двоеглазов, Ибрагимов, Кессель
МПК: G06F 7/39
Метки: множительное, число-импульсов
...элемент И 15 и разрешает прохождение импульсов через элемент 10.Поступление импульсов частоты генератора 45 импульсов 20 в регистр второго сомножителя прекращается. Через элемент 10 и элемент ИЛИ 18 импульсы генератора 20 начинают заполнять разряды регистра 1 и счетчик 7. На выходе одного из разрядов регистра, в котором было записано наибольшее число, появляется импульс переполнения, который переводит один из триггеров блока триггеров 3 в положение, накладывающее запрет на элемент И 14, и подготавливает к срабатыванию элементы И блока элементов 5. Элемент И 14 своим выходом запрещает прохождение импульсов через элемент 11, через который на счетчик 9 начинают поступать импульсы генератора 20. На выходах счетчика 9 начинают появляться...
Устройство для синхронизации импульсов

Номер патента: 607343
Опубликовано: 15.05.1978
Автор: Халитов
МПК: H03K 19/42
Метки: импульсов, синхронизации
...элемента И-НЕ 6, шины 7 первого тактового импульса, шины 8 второготактового импульса, шины 9 входных импульсов и выходной шины 10. 5Устройство работает следующим образом,При отсутствии входного сигнала с шины 9 на входах триггеров 1 - 3 присутствует логический "О", на инверсных вьходех г- логическая "1, а на врямьх выходах - логический "О". Тактовые импульсыс шин 7 и 8, приходящие на входы элементов И-НЕ 4 - 6, не изменяют состояниеустройства, и на выходной шине 10 сигналототствует,При поступлении по шине В сигнала положительной полярности тактовый импульсс шины 7 проходит через элемент И-НЕ 4и переключает триггер 1, Потенциалы навходах триггера 2 меяяОтсяеС прямого выхода триггера 1 на элемент И-НЕ 6 подается первый разрешающийсигнал...
Многофункциональное счетное устройство

Номер патента: 655073
Опубликовано: 30.03.1979
Авторы: Александров, Воробьева, Контарев, Кулаков, Куценко, Щетинин
МПК: H03K 23/00
Метки: многофункциональное, счетное
...и выражается формулой где гг - число разрядов счетчика;К, - коэффициент пересчета;1(, - коэффициент деления.Коэффициентом пересчета Кназывается число, которое необходимо записать в пере- счетное устройство, чтобы получить нужный коэффициент деления.Коэффициентом деления К называется число, равное количеству импульсов, которое необходимо подать на вход пересчетного устройства, чтобы получить импульс на его выходе,В качестве примера выбирается К=7, т. е. на вход пересчетного устройства нужно подать 7 импульсов, чтобы получить импульс на его выходе. Тогда исходным состоянием схемы будет состояние, соответствующее числу 9 (24 - 7=9), код которого (1001) нужно записать в счетчик. Для этого на входы 35 и 27 подаются сигналы логическая...
Устройство для ретрансляции сигналов между каналом ввода вывода и внешними устройствами

Номер патента: 949649
Опубликовано: 07.08.1982
МПК: G06F 3/04
Метки: ввода, внешними, вывода, каналом, между, ретрансляции, сигналов, устройствами
...1 может работать в несколькихрежимах,1 режим - работа по инициативе каналас основной или дополнительной цепочкамивнешних устройств,В этом режиме на входы 7 и 10 устройства 1 поступают соответственно сигналы адреса от канала и выборки от канала, причем, согласно требованиям к интерфейсу вводавьвода сигнал адреса от канала предшествует сигналу выборки от канала. Таким образом, сигнал со входа 7 через усилитель-приемник 27 поступает на О-вход триггера 47, затем сигнал со входа 10 через замкнутые контакты 60 реле и усилитель-приемник 30 поступает на С-вход триггера 47 и устанавливает его по передйему фронту сигнала выборки в единичное состояние, Единичный выход триггера 47 открьвает элементы И 48 и И 52, а нулевой выход...
Устройство для моделирования дискретного радиоканала

Номер патента: 1084828
Опубликовано: 07.04.1984
МПК: G06N 1/00
Метки: дискретного, моделирования, радиоканала
...первого элемента И, Р-вход первого Р-триггера является информационным входом устройства, объединенные тактовые входыР-триггеров и третьи входы элементов И соединены с тактовым входом устройО ства, выходы первого и второго элементов И дополнительного входного каскада подключены соответственно к входам третьего и четвертого дискретных элементов задержки, тактовые входы которых через пятый делитель частоты соединены с тактовым входом устройства, выходы третьего и четвертого дискретных элементов задержки соединены соответственно с входами первого и второго коммутаторов, выходы которых соединены соответственно с единичным и нулевым входами второго триггера, выход которого подключен к Р-входу первого Р-триггера входного каскада. 35На чертеже...
Предыдущий патент: Устройство для управления схватом робота
Следующий патент: Регулятор
Случайный патент: Способ лечения острого панкреатита