Цифровая система программного управления роботом манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
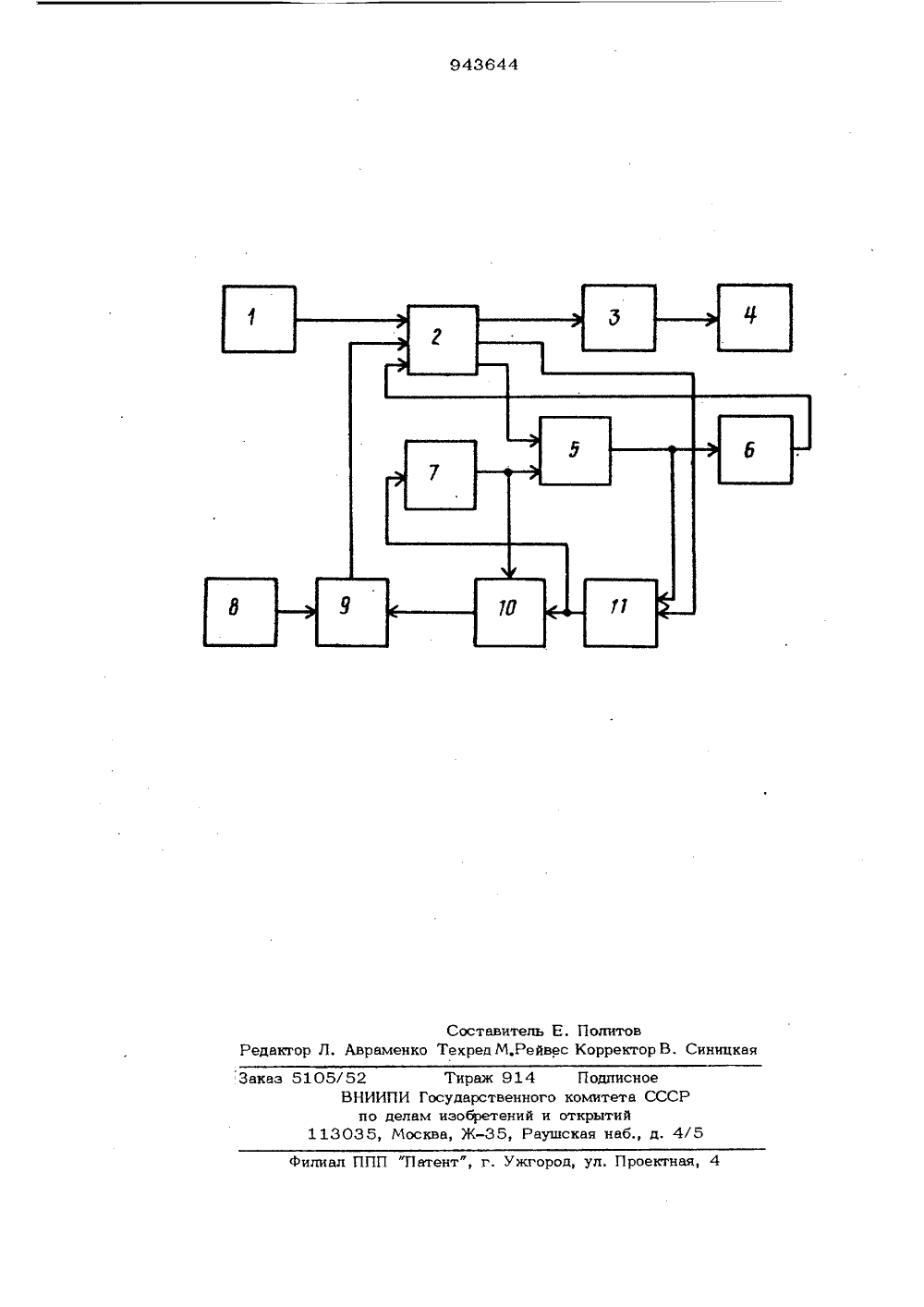
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 943644 Союз СоветскикСоциапистичесиикРеспублик(51)М. Кл, б 05 В 19/00 В 25 У 9/00 3 Ьеударстюай кееатет СССР Эф делам кэвбретеккЯ и атерыткЯ(72) Авторы изобретения Ю. М. Коротун, В, Т. Антоненко и В. Г. Тимошенко Ордена Ленина и ордена ТрудовогоКрасного. Знамениинститут электросварки им. Е, О, Патона(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ РОБОТОМ-МАНИПУЛЯТОРОМ1Изобретение относится к программному управлению роботами-манипуляторами и может быть использовано для управления движением рабочего органа промышленного робота, например, при точечной сварке,5Известив цифровая система программного управления роботом-манипулятором, содержащая блок задания перемещения, приводы, датчики перемещений, логические блоки, соединенные с приводами, блок па-о мяти, имеет низкую производительность из-за колебаний рабочего органа, обусловленньи старт-стопным режимом 11 . Наиболее близким к предлагаемому15 является система, содержащая блок эта. лонного сигнала и последовательно соединенные управляемый генератор, коммутатор и шаговый привод, связанный с исполнительным механизмом, в также последовательно соединенные нуль-орган, элемент И, реверсивный счетчик и первый блок пвмяти, второй вход которого подключен к выходу нуль-органе, вход 2которого соединен с выходом реверсивного счетчика, второй вход которогоподключен ко .второму выходу коммутатора, третий выход которого соединенс вторым входом элемента И, выход которого через блок памяти подключен квторому входу коммутатора 2 1,Недостатками этой системы являютсяее сложность и низкая точность, обусловленные двойным преобразованиеминформации о превращении координат изцифровой формы в жалоговую и обратно.ЭЦель изобретения - упрощение и повышение точности системы.Поставленная цель достигается тем,что система содержит блок умножения,первый вход которого соединен с выходомблока эталонного сигнала, второй вход -с выходом первого блока памяти, в выход - с третьим входом коммутатора.Нв чертеже показана функциональнаясхема цифровой системы программногоуправления роботом-манипулятором.943644 4 5 1 О 15 25 ЭО Э 5 40 45 5055 Система содержит управляемый ге нератор 1, коммутатор 2, шаговый привод 3, исполнительный механизм 4, элемент И 5, блок памяти 6, нуль-орган 7, блок эталонного сигнала 8, блок умножения 9, блок запоминания амплитуды 10 и реверсивный счетчик 11. Система программного управления работает следующим образом.В процессе обучения оператор с немощью управления генератора 1 перемещает исполнительный механизм 4 в требуемую точку данной координаты, при этом выходной сигнал управляемого генератора 1 в виде последовательности импульсовпоступает одновременно на привод 3 и реверсивный счетчик 11, вкотором происходит алгебраическое суммирование информации о перемещениях по данной координате, Чтобы перенести информацию из реверсивного счетчика 11 в блок 6 памяти оператор запускает блок 8 эталонного сигнала, выполненного в виде управляемого по частоте генератора, частота импульсов на выходе которого изменяется оптимальным в смысле какого-либо критерия образом, например, оптимальным в смысле быстродействия исполнительного органа. Частота импульсов блока эталонного сигнала 8поступает в блок умножения 9, где умножается на код, хранящийся в блоке запоминания амплитуды 10, выполненного в виде регистра числа и представляющий собой информацию о величине приращения по данной координате, Таким образом, с выхода блока умножения 9 в блок памяти 6 через коммутатор 2 поступает последовательность импульсов, оптимальная в смысле быстродействия исполнительного механизма 4 и пропорциональная требуемому перемещению, Одновременно через коммутатор 2 и элемент И 5 последовательность импульсов поступает на вычитающий вход реверсивного счетчика 11. После того, как вся информация о перемещении вычтется из реверсивного счетчика 11, что соответствует переходу исполнительного механизма 4 в требуемую точку, элемент И 5 закроется нуль-органом 7, и прекратится подача импульсов на входы блока памяти 6 и реверсивного счетчика 11, Тем же сигналом нуль-органа 7, который может быть выполнен например, в видесхемы ИЛИ, входы которой соединены споразрядными выходами реверсивногосчетчика, сбрасывается в нуль блок запоминания амплитуды 10, Система управления готова к программированиюперемещения в следу кзцую точку.В режиме воспроизведения записаннаяпри обучении программа через коммутатор 2 поступает из блока памяти 6 нашаговый привод 3, обеспечивая оптималы.ное по быстродействию перемещение исполнительного органа в заданную позицию,Применение изобретения позволяетупростить цифровую систему программногоуправления роботом-манипулятором и повысит ее точность,ф ормула изобретения Цифровая система программного управления роботом-манипулятором, содержащая блок эталонного сигнала и последовательно соединенные управляемый генетратор, коммутатор и шаговый привод,связанный с исполнительным механизмом, а также последовательно соединенные нуль-орган, элемент И, реверсивныйсчетчик и первый блок памяти, второйвход которого подключен к выходу нульоргана, вход которого соединен с выходом реверсивного счетчика, второй входкоторого подключен к второму выходукоммутатора, третий выход которого соединен с вторым входом элемента И,выход которого через второй блок памяти подключен к второму входу коммутатора, о т л и ч а ю щ а я с я тем, чтос целью упрощения и повышения точностисистемы, она содержит блок умножения, первый вход которого соединен свыходом блока эталонного сигнала, второй вход - с выходом первого блокапамяти а выход - с третьим входомкоммутатора,Источники информации,принятые во внимание при экспертизе 1 . Авторское свидетельство СССР% 541147, кл, 6 05 В 19/42, 1972,2. Авторское свидетельство СССР по заявке % 2447236/18-24,кл, В 25 3 9/00, 1974 (прототип).Составитель Е. ПолитовРедактор Л. Авраменко ТехредМ,Рейвес КорректорВ. СиницкаяЗаказ 5105/52 Тираж 914 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб д. 4/5филиал ППП "Патент, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
2750286, 11.03.1979
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
КОРОТУН ЮРИЙ МИХАЙЛОВИЧ, АНТОНЕНКО ВЛАДИМИР ТИМОФЕЕВИЧ, ТИМОШЕНКО ВСЕВОЛОД ГЕОРГИЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: манипулятором, программного, роботом, цифровая
Опубликовано: 15.07.1982
Код ссылки
<a href="https://patents.su/3-943644-cifrovaya-sistema-programmnogo-upravleniya-robotom-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система программного управления роботом манипулятором</a>
Устройство для контроля блоков постоянной памяти

Номер патента: 1795522
Опубликовано: 15.02.1993
Авторы: Кочин, Лукьянович, Супрун
МПК: G11C 29/00
Метки: блоков, памяти, постоянной
...3, б и 9 соответственно установлены в нулевое состояние. По сигналу "Пуск" блок 2 управления начинает формировать тактовые импульсы, импульсы обращения и импульсы синхронизации, следующие с рабочей частотой Г проверяемого блока 14 постоянной памяти,Тактовые импульсы поступают на вход третьего счетчика 9 и на второй вход второго коммутатора 8, импульсы обращения - на проверяемый блок 14 постоянной памяти и вход формирователя 10 сигнала "Строб", а импульсы синхронизации - на вход синхронизации блока 1 логического анализа. С выхода третьего счетчика 9 сигнал типа "меандр" поступает на управляющий вход первого коммутатора 7 и первый вход второго коммутатора 8, с выхода которого тактовые импульсы с частотой 0,5 Р поступаютна первый...
Устройство для записи информации в блок программируемой постоянной памяти

Номер патента: 955195
Опубликовано: 30.08.1982
Авторы: Поляшов, Соболев, Суворов
МПК: G11C 17/00, G11C 7/00
Метки: блок, записи, информации, памяти, постоянной, программируемой
...такты;Т - начало записи кода а в блокпамяти, 25Т, - конец записи кода О;временной интервал непосредственно записи в блокпамятиУстройство работает следующим об разомо Процесс записи информации в блок памяти можно разбить,на два этапа: первый этап - этап ожидания или этап подготовки информации, когда происхо дит смена адреса и данных, подлежащих записи, и второй этап - этап непосред" ственно работы устройства, который ,состоит из а рабочих тактов, а каждый такт, в свою очередь, подразделя ется на два временных интервала: первый - считывание из блока памяти и второй - запись в блок памяти.На этапе подготовки устанавливается необходимый адрес Ь на выходе ком" 45 мутатора 8 и данные с на выходе блока 1 (Фиг,2),В момент Т с выхода блока 1...
Устройство для обнаружения ошибок в блоках интегральной оперативной памяти

Номер патента: 1605281
Опубликовано: 07.11.1990
Автор: Стыврин
МПК: G11C 29/00
Метки: блоках, интегральной, обнаружения, оперативной, ошибок, памяти
...5, наличие ошибки при поразрядном сравнении, циклы проверкипамяти (записи-считывания и чтения),прямой или инверсный код контрольноготеста и код текущего адреса проверяемой ячейки памяти,Таким оЬразом, повышается достоверность обнаружения неисправностей в 05281 6блоках интегральной оперативной памяти, что позволяет осуществлять функционально-технологический контроль,диагностику и наладку блоков памятипри изготовлении и ремонте, а такжевходной функциональный контроль БИСполупроводниковой оперативной памятив автономном режиме на их рабочихчастотах.Указанные преимущества обусловлены реализацией режимов многократногообращения (циклы записи-считывания)по адресу яцейки памяти с ошибкой,двукратного обращения по каждомуадресу ячеек памяти при...
Устройство для контроля сбоев псевдослучайного испытательного сигнала

Номер патента: 1234985
Опубликовано: 30.05.1986
МПК: H04B 3/46, H04L 11/08
Метки: испытательного, псевдослучайного, сбоев, сигнала
...очередного такта сдвига информации вычислительный блок 22 запоминает информацию на выходах предпоследней ступени первого счетчика 15. После завершения сдвига информации вычислительный блок 22 снимает с адресной шины комбинацию, соответствующую сдвигу информации. При этом информация в счетчиках 15, 16 и 18 после полного цикла сдвига.возвращается в соответствующие каскады счета, а устройство снова переходит в режим счета импульсов сбоев и меток времени.Следовательно в памяти вычислительного блока 22 имеется информация о количестве импульсов сбоев, зарегистрированных первым и вторым счетчиками 15 и 16, и меток времени, зарегистрированных в счетчике 18 от генератора 17, Сумма показаний первого и второго счетчиков 15 и 16 дает общее...
Устройство для сопряжения группы операционных блоков с общей памятью

Номер патента: 1444790
Опубликовано: 15.12.1988
Автор: Чабуркина
МПК: G06F 13/00
Метки: блоков, группы, общей, операционных, памятью, сопряжения
...5, и сигналы с информационной шины 14 "Адрес второго операнда" (из операционного блока, который задействован в текущей команде - вырабатывается устройством управления операционного блока после инициирования его работы) совпали, следовательно, выбрана та часть коммутатора 5, которая организует связь операционных блоков в текущей группе, и если на входы одного из узлов 40 коммутации второго операнда (количество которых,подключенных к выходу одного элемента 39 сравнения, соответствует общему количеству операционных блоков)поступил сигнал с выхода памяти 4состояний с шины 33, Фиксированиеначала коммутации осуществляется посигналу с шины 32 "Строб приемакоманды" первыми элементами И 42 узла 40 коммутации. второго операнда.Сохранение...
Предыдущий патент: Многоканальная система управления технологическими агрегатами
Следующий патент: Устройство для программного управления процессом крашения материала
Случайный патент: Устройство для контроля работы сельскохозяйственных агрегатов