B25J 19/00 — Вспомогательные устройства в манипуляторах, например для контроля, для визуального наблюдения; предохранительные приспособления, конструктивно сопряженные с манипуляторами или специально приспособленные к ним
Палец-ловитель

Номер патента: 1168403
Опубликовано: 23.07.1985
МПК: B25J 19/00
Метки: палец-ловитель
...подпружиненных относительно оси пальца-ловителя плунжеров, установленных в этих расточках с возможностью взаимодействия с торцом нецилиндрической приемной части. При таком выполнении приемной части пальца-ловителя она автоматически (под действием силы тяжести) принимает такое положение, когда ее цилиндрическая поверхность, являющаяся продолжением цилиндрической поверхности установочной части пальца-ловителя, оказывается сверху, а плоскость эксцентриситета принимает вертикальное положение. Необходимость в довороте шпинделя отпадает. Исключение из системы управления роботизированным комплексом системы управлением механизмом доворота шпинделя повышает надежность его работы.На фиг. 1 изображен палец-ловитель, общий вид; на фиг. 2 - вид А на...
Регулируемый упор манипулятора

Номер патента: 1194678
Опубликовано: 30.11.1985
Авторы: Кораблев, Соколов, Федотова
МПК: B25J 19/00
Метки: манипулятора, регулируемый, упор
...переставным подпружиненным штоком, имеющим выступы, взаимодействующие с,торцовыми шлицамн регулируемого винта.На фиг. 1 показан регулируемый упор в поджатом и свободном его состо. янин, продольный разрез; на фиг, 2 - вид А на фиг,Регулируемый упор содержит корпусв котором концентрично друг другу 20 размещены полый ползун 2, ограниченный от проворота шпонкой 3, и регулируемый винт в виде втулки 4 с шпицевым отверстием, на переднем торце которой выполнены шлицевые пазы 5, 25 а на поверхности шлицевого отверстия - кольцевые проточки 6. Ползун 2 подпружинен пружинами 7 к корпусу 1, который связан с тормозным устройством 8.30В втулке 4 установлен переставной шток 9, на наружной поверхности которого выполнены продольные шлицы и поперечные...
Рука робота (ее варианты)

Номер патента: 1235724
Опубликовано: 07.06.1986
МПК: B25J 19/00
Метки: варианты, ее, робота, рука
...робота, На неподвижной части 1 установлен привод 7 перемещения подвижной части 3.Рука робота по второму варианту содержит неподвижную часть 1, соединенную с основанием 2 робота, и подвижную часть 3, один конец которой расположен внутри неподвижной части 1, а на другом установлен схват 4. На внутренней поверхности неподкоторого выполнена компенсационная вставка, удовлетворяет соотношениюи, ЫДТ == (и 1 н ип 1 п) ДТ,где ип, ин и ип - линейные коэффициентытермического расширениясоответственно компенсационной вставки, неподвижной и подвижной частей руки;Д 7 - диапазон рабочих температур;1, 1 н и 1 - длины соответственно компенсационной вставки, неподвижной и подвижнойчастей руки.4. Рука робота по п, 3, отличающаясятем, что, с целью...
Моментный загружатель манипулятора

Номер патента: 1240582
Опубликовано: 30.06.1986
Автор: Горбунов
МПК: B25J 19/00
Метки: загружатель, манипулятора, моментный
...и задающего органов.На фиг. 1 изображен моментный загружатель манипулятора, размещенный в кистевом узле задающего органа, общий вид; на фиг.2 - кинематическая и электрическая схема моментного загружателя манипулятора; на фиг.3 - термобиметаллическая пластина со спиралью и фиксируюшим элементом. Моментный загружатель манипулятора содержит подвижное звено 1, размещенное в нем неподвижное звено 2, и муфту свободного хода двустороннего действия. Обойма 3 муфты свободного хода жестко закреплена на подвижном звене 1, а звездочка 4 этой муфты - на неподвижном звене 2, На неподвижном звене 2 закреплены одни концы термобиметаллических пластин 5 и 6 с последовательно соединенными спиралями 7 и 8, а другие концы пластин. 5 и 6 жестко связаны с...
Предохранительное устройство

Номер патента: 1256960
Опубликовано: 15.09.1986
Автор: Васильев
МПК: B25J 17/02, B25J 19/00
Метки: предохранительное
...фиг. 2.Предохранительное устройство состоит из двух полумуфт 1 и 2, концентрично расположенных одна относительно другой и сопряженных между собой по цилиндрическим 3 и торцовым 4 поверхностям. При этом полумуфты 1 и 2 подпружинены одна относительно другой в осевом направлении посредством упругого элемента 5, например, пакета тарельчатых пружин. Полумуфта 1 соединена с помощью болтов с рукой манипулятора (не показана), а полумуфта 2 также с помощью болтов закреплена на рабочем органе (не показан). На одной из пары сопряженных цилиндрических 3 и торцовых 4 поверхностей полу- муфт 1 и 2 выполнены соответственно торо- образные выступы, например, полумуфты 1 и 2 соединены посредством тороидального выступа 6, выполненного на полумуфте 1, и...
Технологическая камера

Номер патента: 1263528
Опубликовано: 15.10.1986
Автор: Горбунов
МПК: B25J 19/00, B25J 21/00
Метки: камера, технологическая
...с ви деосенсором; на Фиг.2 - реализация дистанционных манипуляторов для глубоких и длинных камер и каньонов; на Фиг.З в ,то же, вариант.Устройство содержит исполнитель ный 1 и задающий 2 органы. На кистевом узле 3 закреплен оптический элемент 4, связанный с одним из концов световода 5, Второй конец световода совмещен с проектором б, который установлен на неподвижной части исполнительного органа 1 и направлен на экран 7, размещенный на стенке камеры, напротив окна. На противополож" ной стене может быть установлен дополнительный экран 8 в виде матового стекла с возможностью перемещения и установки перед смотровым окном 9. Устройство работает следующим об разом. Исполнительный орган 1 повторяет движения оператора с помощью задаю...
Манипулятор

Номер патента: 1289672
Опубликовано: 15.02.1987
МПК: B25J 19/00, B25J 9/00
Метки: манипулятор
...установки измерителя толщины7 на различную ширину ленты предусмотрено ручное клеммное соединение24 втулки 9 с кареткой 3. Степеньсжатия пружины 10 регулируется винтовым устройством 25.Механическая рука 5 от поворотавокруг своей продольной оси удерживается шариковым Фиксатором 26, сопрягаемым с процольным пазом 27, выполненным на поверхности направляющей 4 с усилием, предотвращающим поворот механической руки 5 при прокатке ленты, но позволяющим поворот руки от усилия набегания оставшейсячасти оборванной ленты.Манигулятор работает следующимобразом.В исходном положении каретка 3и шарнир 19 находятся в крайнем левом положении, а механическая рука5 - в крайнем нижнем положениях;пружина 10 разжата, собачка 11 - вкрайнем верхнем положении....
Устройство для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов

Номер патента: 1309907
Опубликовано: 07.05.1987
МПК: B25J 19/00
Метки: инструментов, крепления, манипуляторов, направления, наружного, перемещающихся, питающих, проводов
...линией петли 16 илипучка 14. Согласно изображенному примеру выполнения упругий элемент (рычаг) 39 образуется двумя винтовымипружинами 40 и 41, связанными с зажимным корпусом 42, жестко охватываю 5 1309907 33 для каждой отдельной части 31 (32) представляет собой периферийный участок для выполнения дальнейших отверстий 27. После зажатия проводов части 31 и 32 соединяют одна с другой. Для образования соединенного с геометрическим замыканием диска части 31 и 32 соединены одна с другой посредством быстроразъемного соединения, например пружинного стопорного коль ца 34 и т.п, При этом пружинное стопорное кольцо 34 может быть зенковано в выполненной по окружности канавке, Вдоль разделительной линии 33 отверстия 27 в отдельных частям 31 и...
Разгрузочное устройство для промышленного робота

Номер патента: 1313712
Опубликовано: 30.05.1987
Автор: Чебоксаров
МПК: B25J 19/00
Метки: промышленного, разгрузочное, робота
...с направляющим элементом, связанную со стойкой 1, и каретку 3 с приводом 4 ее перемещения, установленную на направляющем элементе стрелы 2. На каретке 3 установлен привод 5 натяжения гибких тяг 6, связанных с конечным звеном 7 робота, несущим схват 8. На руке робота также установлен тензодатчик 9. Кроме того, для руки робота, имеющей поворотное звено 10, установленное на колонне 11, жестко связанной с основанием, стрела 2 снабжена приводом 2 ее поворота, а стойка 1 расположена внутри колонны 11. Позициями 13 - 15 обозначены приводы перемещения звеньев руки робота.Устройство работает следующим образом.После захвата схватом 8 груза на несущее звено руки робота начинает действовать изгибающий момент, который улавливается датчиком деформаций...
Предохранительное устройство

Номер патента: 1331639
Опубликовано: 23.08.1987
МПК: B25J 19/00
Метки: предохранительное
...полость силоВого цилиндра связана магистралями через редукпионный клапан 11 с ист(яником давления. Между Винтами 5, установленными в крышке 4, и опорными втулками2, установленными В поршне 7, расположены три шарика 13, Образя шарнирное соединение руки манипулятора с корпусом рабочего органа чсре 1:гва коццецтрично расположенные элемцта, игранп(ие роль полумуфт: поршень 7 и вцутреццнк стенку крышк,. 4 силового цилиндра. Порпень 7 кинематически связан с рабочим элементом датчика 14 переме(цения 1 В данном случае с рабочим элементом конечного выключателя) посредством толкате.я 15 и пружины 16 сжатия Для герметизации рабочей полости цилиндра со стороны толкателя В корпусе 1 установлено уплотцеци 17 л,я подвижных соединений Между...
Способ контроля зажима детали в патроне станка с помощью робота

Номер патента: 1342731
Опубликовано: 07.10.1987
Авторы: Гвоздев, Рахинштейн, Самыкин
МПК: B25J 19/00
Метки: детали, зажима, патроне, помощью, робота, станка
...= акреплен датчик 7 перемещения (фотоимпульсный датчик), электрической цепью соединенный с блоком8 измерения пути, который связан сблоком 9 управления,редлагаемый способ контроля зажима детали В патроне станка заключаетПри нормальной работе механизмаи м.3.патронаотсутствует перемещение механизмазахвата робота.6Устройство контроля зажима детали в патроне станка с помощью робота, реализующее предлагаемый способ, работает следующим образом,С блока 9 управления подается команда на перемещение механизма 3захвата с деталью 2 в зону захватапатрона 1. Сигнал через усилительмощности поступает на электродвигатель 6, который с помощью механизма5 перемещения приводит в поступательное движение механизм 3 захватаи перемещае г деталь 2 в .,ону...
Измерительная головка для робота

Номер патента: 1344599
Опубликовано: 15.10.1987
МПК: B25J 19/00
Метки: головка, измерительная, робота
...за счет определения местоположения объекта манипулирования относительно головки.На чертеже представлена схема измерительной головки.Измерительная головка для робота содержит потенциальный электрод 1, соединенный с генератором 2 напряжения, измерительные электроды 3, 4 и 5, подключенные к системе 6 регистрации. Все электроды защицены экранами 7 - 1 О, которые соединены вместе и заземлены. Все электроды размещены на общем основании 11. Головка работает следующим образом.Электрол 1, находясь под потенциалом генератора 2, создает в окружающем пространстве электрическое поле, которое электризует все обьекты, находящиеся вблизи головки. Следовательно, все обьекты создают собствснное электрическое поле, кото. рос наводит электрические...
Промышленный робот

Номер патента: 1344600
Опубликовано: 15.10.1987
Автор: Чебоксаров
МПК: B25J 19/00
Метки: промышленный, робот
...с управлянщим вдом привода 4. Позициями 16 ц 17 обозначены приводы вертикального перемещения.Привод 14 может быть выполнен на основе гидро или пцевмоцилицдра или двигателя любого гипа с намоточным бард. баном и связдн с рабочим органом 13 посредством тросовПромышленный робот рдботаег следующим образом.Послс захвата рабочим органом 13 груза на основной мост 11 начинает действовать изгцбан:ций момент, который устанавливается датчиком 15. По сигналу датчика 15 привод 14 через связывающие элементы (тросьг цдчццдет тянуть рабоч ь орган ввер до те пор, пока основной мост, а вместс, ццм и с 1 ороны 1 ц 3 рамы пол цостьг( ц. рдзгрузятс 5. Так)м образом позициони рунтщие элс мс цты к(цструкццц роботд двтома)ц е ки рдзгружднтся в еч(2ние всего...
Задающее устройство для управления роботом-манипулятором
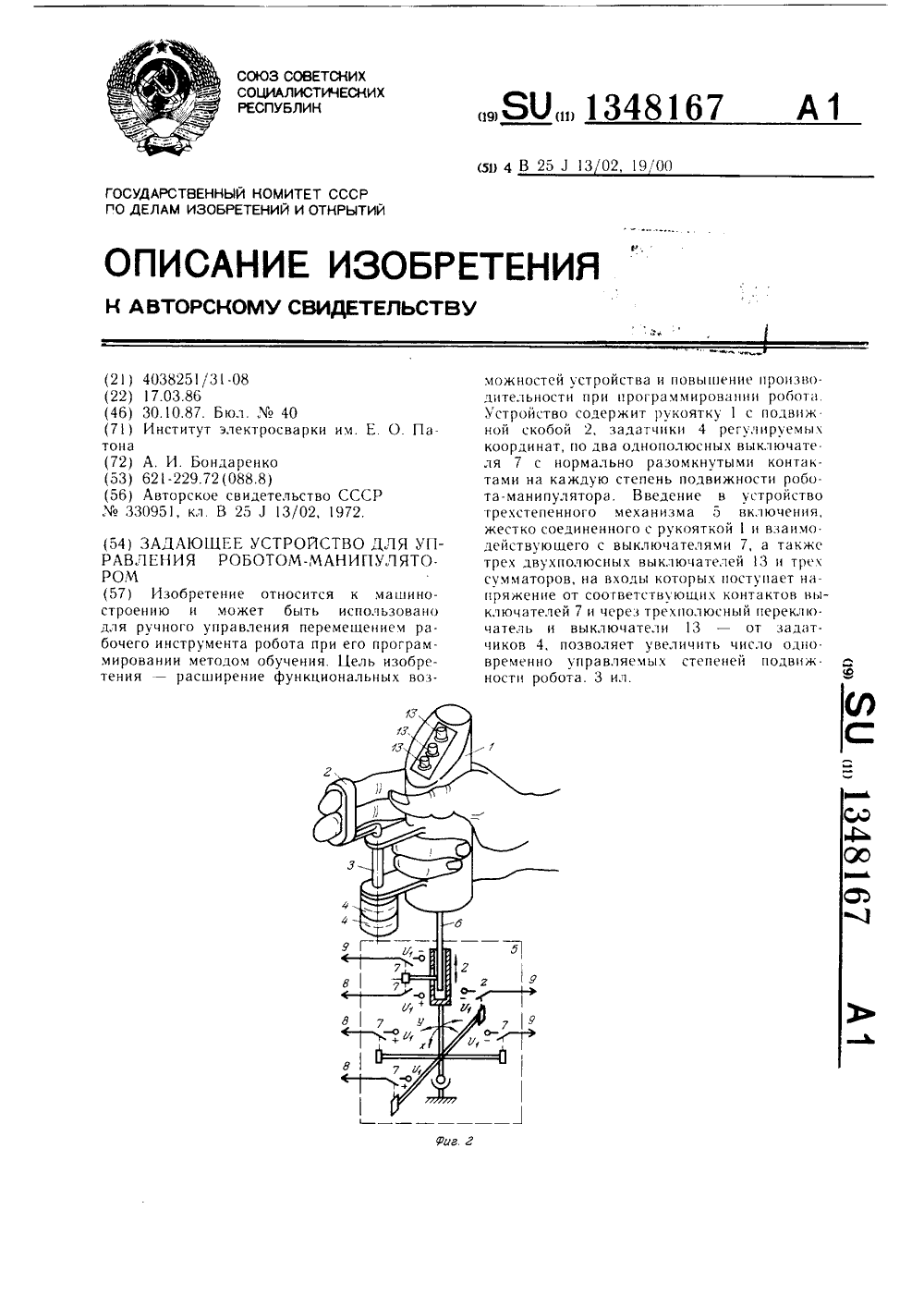
Номер патента: 1348167
Опубликовано: 30.10.1987
Автор: Бондаренко
МПК: B25J 13/02, B25J 19/00
Метки: задающее, роботом-манипулятором
...и 9 на соответсгвующие вхолы сумматоров 16 поступают сигнал (.1 Выходные сигналы, сфор. мированные сумматорами 16, поступают в систему управления роботом, в результате чего рабочий инструмент робота булет лвигаться по лвум коорлинатам. Величина сигнала нд выходе сумматоров опрелеляется выражением) ) ,= К(.) ,гле К= -- коэффициент усиления суммаК,тора.Так как величина перемещения Х)У, то оператор при выводе рабочего инструмента в точку В периолицески отключает движение по координате У.Для сокращения времени перемещения рабочего инструмента по координате Х оператор устанавливает Лвухполюсный трех- позиционный переключатель 12 в положение 1 или 11 (в зависимости от требуемого направления движения рабочего инструмента) и с помощью большого...
Рука робота

Номер патента: 1348171
Опубликовано: 30.10.1987
Автор: Царевский
МПК: B25J 19/00
...предприятие, г, Ужгород, ул Проектная, 4зобрегение относится к специальному технологическому оборудованию, а именно к исполнительным органам разнообразных промышленных роботов или манипуляторов, применяемых во всех отраслях машиностроения. Целью изобретения является повышение точнос 1 и позиционирования за счет компенсации веса переносимой заготовки реактивной силой струи сжатого воздуха, направленной вертикально вверх, и уменьшение массы за счет отсутствия привода Компенсации.На чертеже изображена рука робота, обгций вид Рука робота содержит горизонтально расположенный стержень 1 трубчатого сечения, один конец которого жестко или подвижно установлен в корпусе 2 робота, а на другом установлено захватывающее...
Очувствленный схват робота

Номер патента: 1373565
Опубликовано: 15.02.1988
Авторы: Запорожец, Кондратенко, Чудайкин
МПК: B25J 15/00, B25J 19/00
Метки: очувствленный, робота, схват
...щего усилия губок 1 и 2 с помощью привода 18. Когда силы трения, возникающие между покрытиями 11. зажимных элементов и объектом 10, превышает противодействующую силу упругих элементов 7, происходит смешение накладок 4 и 5 вместе с зажим- ными элементами 8 относительно губок 1 и 2. Это приводит к изменению сигнала на выходе датчика усилия 12. Выходной сигнал датчика 12 Г) (1) подается одновременно на вход блока задержки 20, на выходе которого в процессе захвата Объекта 10 формируется сигнал Ь - , где Й - время задержки, и на инвертируюший вход первого сумматора 21 гта прямой вход первого сум матора 21 при этом поступает сигнал Ь(1-(,). Г 1 ри изменении сигнала Б(1) на выходе первого сумматора 21 появляется сигналд (1( 1) = (.1 (- ( ) -...
Дискретное чувствительное устройство для обмера объемных предметов

Номер патента: 1373568
Опубликовано: 15.02.1988
Автор: Кудинов
МПК: B25J 19/00
Метки: дискретное, обмера, объемных, предметов, чувствительное
...возможности изчерения разм(рцв об- ел 1 н ы л и рс;1 л .)тце.11 а фиг. 1 Нрелстц 1)лк ца скеч а устройства Об(пий вил, на фиг 2 тц же, вил сбоку.ИзлСр(тельня .Ин(ф(г. 1) Оордзов 313 кцпзч Крцчь 1 сел 2, нан(знньк цсь 3. 11 ижниконцы кцрочысел 2 вздичоле(стлк)т с цбъкт(м измерения 4. Нерече(цзслыч грзнспортирую(цич Орган(ч 5, и цтк.цн 51 и) гс я цт в(.рти кал ьнои и,1 О(.кости фи. 2). 11 ри этм )г лдтчикцв 6, ныпцлценпь(л, пдпричер, в зиле бескоцт(ктныл вык,к) чзте лей, Отлц,1 ят верки ие кцн пы кцрцмыс(л 2 В ислолн)е положение кцрмысланцзврп(дк)тс 51 пц;1 л(.ист вием сцбстненццгц вес и пружин 7.)лцрцл(ьсла 2 устнвлены нз (си 3 гру(1- п(1 м 31, и л.1 и 3 кц)н)ч 11 се,1 13 каждой Груп пе лип йнц изменяется.;) стрцисгвц рботает слелукицич...
Устройство для манипулирования деталями

Номер патента: 1382397
Опубликовано: 15.03.1988
Автор: Вальтер
МПК: B25J 19/00, B25J 3/00
Метки: деталями, манипулирования
...показанной на фиг.6, в пределах несущего корпуса. Эта измерительная система 43 может быть образована, например, натянутой шкалой оснащенной кодом, которая может считываться при движении промежуточной шариковой опоры 4 по направляющим колоннам 35, 36, для того чтобы удерживать ее между конечными положениями, определенными концевыми упорами 40, например, в промежуточныхположениях, и с помощью тормоза помере надобности при фиксировании,Вместо двух направляющих колоннможно усиливать в требуемом направлении действия главной нагрузки лишьодну, если этого достаточно для определенного случая, Кроме того, в рамках изобретения можно видоизменятьформу опорных элементов или опорныхпланок, если при этом две параллельные направляющие колонны...
Устройство для адаптации робота к весу захватываемых деталей

Номер патента: 1395436
Опубликовано: 15.05.1988
Авторы: Захаров, Кондратенко, Миронец
МПК: B25J 13/00, B25J 19/00
Метки: адаптации, весу, захватываемых, робота
...элемента ИЛИ 4, который, будучи задержан первым блоком задержки 7, поступает на первый выход устройства, 25 подавая команду на пробное движение, а также на второй вход второго КБ- триггера 10 и сбрасывает его в нулевое состояние. Нулевой сигнал на выходе последнего вызывает появление ЗО логического нуля на выходе третьего элемента ИЛИ 6, а следовательно, сброс первого ключа 13. Усилитель мощности 20 отключается от выхода второго сумматора 23 Робот выполняет пробное движение, т.е. приподнимает35 захват с зажатой деталью и, если сжимающего усилия недостаточно для удержания детали, то она начинает про-. скальзывать в губках захвата что вы 9 40 зывает срабатывание датчика проскаль зывания 2, сигнал с которого, будучи усилен усилителем 3,...
Механическая рука манипулятора

Номер патента: 1400881
Опубликовано: 07.06.1988
МПК: B25J 18/00, B25J 19/00
Метки: манипулятора, механическая, рука
...плоскость, проходящую через точки приложения сил и 1продольную ось стержня 1, позволяеткомпенсировать боковой изгиб и продольное сжатие, вызванные действиемпроекций уравновешивающих сил Р иР на плоскость, проходящую черезточки приложения сил и продольнуюось стержня 1.,Закон изменения уравновешивающихсил на выходе системы управления взависимости от измеряемых деформаций 2 ВЕ иопределяется передаточнымифункциями А(Р), В(Р) И, (Р)= угр - ), (4 (Р) = - (р)где А(Р), В(Р)Е(Р) и у(Р) - изображения по Лапласу соответствующих величин.35 Например, для пропорциональногозакона управления 14,(Р)=К, Ч(Р)=Кзакон изменения уравновешивающих силимеет вид Система управления с пропорциональным законом управления не обеспечивает полной компенсации...
Способ контроля наличия детали в механизмах захвата робота

Номер патента: 1404332
Опубликовано: 23.06.1988
Автор: Самыкин
МПК: B25J 15/00, B25J 19/00
Метки: детали, захвата, механизмах, наличия, робота
...двухсхватов 2 и 3, расположенных под угслом 90 в подвижном корпусе 4, Каждыйсхват снабжен подвижными кулачками 5,пружинами 6 и выталкивателем 7, служащим для качественной установки впатрон станка детали 8, Пружины б(упругие элементы) и выталкиватель 7образуют механизм выталкивания.Механизм 9 перемещения обеспечивает поступательное движение механизма1 захвата и соединен с электродвигателем 10, на валу которого закреплендатчик 11 перемещения (например, фотоимпульсный датчик). Датчик 11 соединен электрической цепью с блоком 12измерения скорости, выход которогосоединен с блоком 13 дифференцирования. Выход блока 13 связан с первымвходом блока 14 сравнения, второйвход которого связан с блоком 15 эталонной уставки. Выход блока 14 электрически...
Устройство для ограничения угла поворота подвижного звена

Номер патента: 1404339
Опубликовано: 23.06.1988
МПК: B25J 19/00
Метки: звена, ограничения, поворота, подвижного, угла
...4, На оси 4 закреплен флажок 5Вь 1 полненный в виде двуплечего рычага.На стационарной части 2 жестко установлен кронштейн б, на котором закреплены направляющие 7 и. 8, и датчики(конечные выключатели) 9 и 10. Конечные выключатели 9 и 10 установленысо смещением на угол К по отношениюдруг к другу,Конечные выключатели 9 и 10 связаны в электросхеме с приводом поворота поворотной части 1.Устройство работает следующим образом. 35Перед началом работы манипуляторасмещают направляющую 7 относительнонаправляющей 8 на угол о ( с определяется в зависимости от необходимойзоны обслуживания), 40При повороте поворотной части 1по часовой стрелке и приближении флажка 5 к конечному выключателю 10 флажок 5,наезжает на направляющую 7,При этом,...
Промышленный робот

Номер патента: 1414643
Опубликовано: 07.08.1988
Автор: Чебоксаров
МПК: B25J 19/00
Метки: промышленный, робот
...конце которого установлено захватное устройство 3, а. также устройство разгрузки в виде тонкостенной трубы 4, установленной коаксиально стержню 2, причем один 25 конец которой закреплен на основании 1 а другой связан со свободным концом стержня 2 посредством приводов 5 разгрузки и датчиком 6 деформаций, установленных на стержне 2. 30Каждый из приводов 5 разгрузки выполнен в виде полого корпуса 7, закрепленного на внутренней стороне тонкостенной трубы 4, и пневматической диафрагмы 8 с упором 9, взаимодействующим со свободным концом стержня 2. векторную силу усилии Р приводов 5 разгрузки, оказываемых на стержень 2, Под действием груза С на захватном устройстве 3 или при ускорении вращения механической руки стержень 2 начинает...
Устройство для автоматического сцепления и расцепления носителя инструмента многоосного манипулятора

Номер патента: 1421251
Опубликовано: 30.08.1988
МПК: B25J 19/00
Метки: инструмента, манипулятора, многоосного, носителя, расцепления, сцепления
...9 и 10 путем взаимодействия элементов 11 и 12 подсоединительные детали 15 и 16 могут входить взацепление друг с другом, так какони больше не,выполняют относительноевращательное. движение относительно друг друга. Вследствие воздействиястопора 24 арретир 20 разъединяется, так как передаваемый последним звеном 6 на рабочее звено 18 момент вращения воздействует на шарики 21 при неподвижном рабочем звене 17 так, что 25 они перемещаются в отверстия 22 против действия пружин 23.Кроме того, на фиг,2 изображен предохранитель 3 1 отключения, соединяющий фланец 7 с рабочим звеном 18, Этот предохранитель отключения может быть выполнен любым известным образом. Он должен обеспечивать лишь то, что привод манипулятора 1 выключается в момент,...
Схват промышленного робота

Номер патента: 1433792
Опубликовано: 30.10.1988
Авторы: Ананьев, Борисов, Луцков, Новикова, Нуждихин
МПК: B25J 15/00, B25J 19/00
Метки: промышленного, робота, схват
...(К 2, К 3, К 4 реле 13. Устройство работает следующим образом.Схват с разведенными губками 2 подво,дится к захватываемой детали так, что последняя оказывается под губками. Система управления робота (не показана) подает ,команду на опускание схвата. При опускании схвата шток 5 входит в соприкос. новение с деталью и поднимается в верхнее положение. Система управления вырабатывает сигнал на сжатие детали и перевод ее на позицию сборки. После этого губки разводятся и деталь 17, освобождаясь, попадает на узел8 сборки. Шток 5 опускается вслед за деталью и контактирует с ней. Положение штока определяет положение сердечника 4 по отношению к вторичным обмоткам 8 датчика 3 перемещения, определяющего ЭДС на вторичных обмотках 8, которые наводятся...
Манипулятор сборочного автомата

Номер патента: 1437222
Опубликовано: 15.11.1988
Автор: Ненарокомов
МПК: B25J 19/00
Метки: автомата, манипулятор, сборочного
...предыдущих позициях сборочной линии два возможных положения:утопленное со стороны манипулятора(фиг. 5 и 6),Другое плечо 24 рычага 18 расположено по вертикали под гнездом 25 напланке 3. Рычаг содержит дополнитель 10 15 20 25 30 35 40 45 50 55 ное плечо 26, расположенное под гнездом 27 в штоке 12. На планке 3 и штоке 12 на расстоянии а , равном рас-,стоянию перемещения концов плеч 24 и26, от воздействия упора на технологическом оборудовании выполнены гнезда 28 и 29. В гнезда могут вставляться упоры 30 и 31 в виде штифтов.Штоки 12 и 13 подпружинены внизпружинами 32 и 33. На передний конецпиноли закрепляется хомут 34 для крепления захватов.Манипулятор сборочного автоматаработает следующим образом.При воздействии кулачков, расположенных на...
Механическая рука манипулятора

Номер патента: 1440710
Опубликовано: 30.11.1988
МПК: B25J 18/00, B25J 19/00
Метки: манипулятора, механическая, рука
...нулевым или исходным. При этом усилия натяжения всех тяг равны нулю.В данном случае используют, например, систему управления с обратной связью по деформации механической руки манипулятора. Ее задачей является сведение к нулю измеряемых деформаций руки манипулятора путем выработки уравновешивающих сил Р и Р на уравновешивающих тягах(А+ В),1 2 спи где А=)о,В /кР фоХ,/ и /крУо и сро -10 15 20 25 30 35 40 45 50 55 жесткость стержня на изгиб и кручение соответственно, прогиб и угол закручивания корпуса захватного устройства без компенсации, вызванные весом переносимого изделия; расстояние от точки приложения уравновешивающей силы Р +Р 2 до продолънои Оси стержня.20 25 Формула изобретения 5 Д Закон изменения уравновешивающих сил на выходе...
Модуль манипулятора

Номер патента: 1445945
Опубликовано: 23.12.1988
Авторы: Монашко, Семенюк, Щекин
МПК: B25J 19/00, B25J 9/08
Метки: манипулятора, модуль
...пар на звене 21 взаимно перпендикулярны. Вариант соединения промежуточного звена 19 с звеном 21 и поводками 14 и 13 показан на фиг. 2.Модуль манипулятора работает следующим образом.Для подъема звена 21 вдоль оси У. приводы 1 и 2,3 и 4,5 и 6,7 и 8 перемещаются один навстречу другому так, что расстояние между парами приводов одинаковое (фиг. 4). При опускании вдоль этой оси приводы 1 и 2,3 и 4,5 и 6,7 и 8 расходятся, При повороте звена 21 относительно оси У (фиг. 5) приводы 1 и 2, 5 и 6 не перемещаются, приводы 3 и 4 сближаются, а приводы 7 и 8 расходятся или наоборот. При повороте звена 21 относительно оси Х (фиг. 6) приводы 3, 4, 7 и 8 не перемещаются, приводы 1 и 2 сближаются, а приводы 6 и 5 расходятся или наоборот. При повороте...
Устройство для определения кратчайшего пути автономного транспортного робота

Номер патента: 1455343
Опубликовано: 30.01.1989
МПК: B25J 19/00, G06F 15/20
Метки: автономного, кратчайшего, пути, робота, транспортного
...входыкоторых соединены с соответствуФоеФииквыходаии элементов И 9 второй группы,соответствующих столбцди иатрнды модели 1. Вьссод линии 15 эадер 1 ккм является выходом 18 раэреаФенмя передачикода веряФнн крФФтчайлего цутн,устройство работает следуюаФнм образом.Ь нсходмои состоянии счечик 12и регистр 13 обнулены сиги игом цачаль"ной установки, торой девиФратор 11ииевт сигнал раэреаенкя иа выходенулевого разряда, постуФФаФФщего кэлементам И 9 й"го столбча. 1 ояьлеФФиеФ"1 ФФ па выходе и-го элемента 5 означает окончание счета в счетчиках 2, 53434 5 10 15 20 25 30 35 40 после чего работ элементов матрицы,1 блоккруется элеиентои 1 Е 6, а сигна- лы с ГГИ начинают поступать иа вход счетчиха 12 прк наличии раэреФаанщего сигнала ца входе...
Устройство для крепления питающих шлангов к манипулятору

Номер патента: 1458226
Опубликовано: 15.02.1989
Авторы: Семин, Тарабарин, Шабалина
МПК: B25J 19/00
Метки: крепления, манипулятору, питающих, шлангов
...звене манипулятора, хомуты 3 и 4 для крепления питающих шлангов 5, установленные соответственно 25на основании 1 и опорном кольце 2каретку 6 с поддерживающими 7 и направляющим . 8 роликами и спиральнуюпружину 9.На внешней поверхности основания 1 и внутренней поверхности опорного кольца 2 выполнены фасонные проточки под питающие шланги 5, напримерэлектрические кабели.На торцах. основанияи опорного. кольца 2 выполнены концентрическиепазы 10, в которых установлена каретка 6 с возможностью перемещения вдольпоследних, а поддерживающие 7 и направляющий 8 ролики установлены на 40осях каретки 6 с возможностью вращения .Для создания одностороннего натяга питающих шлангов спиральная пружина 9 одним концом крепится к основанию 1, а другим...