Задающее устройство для управления роботом-манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1348167
Автор: Бондаренко
Текст
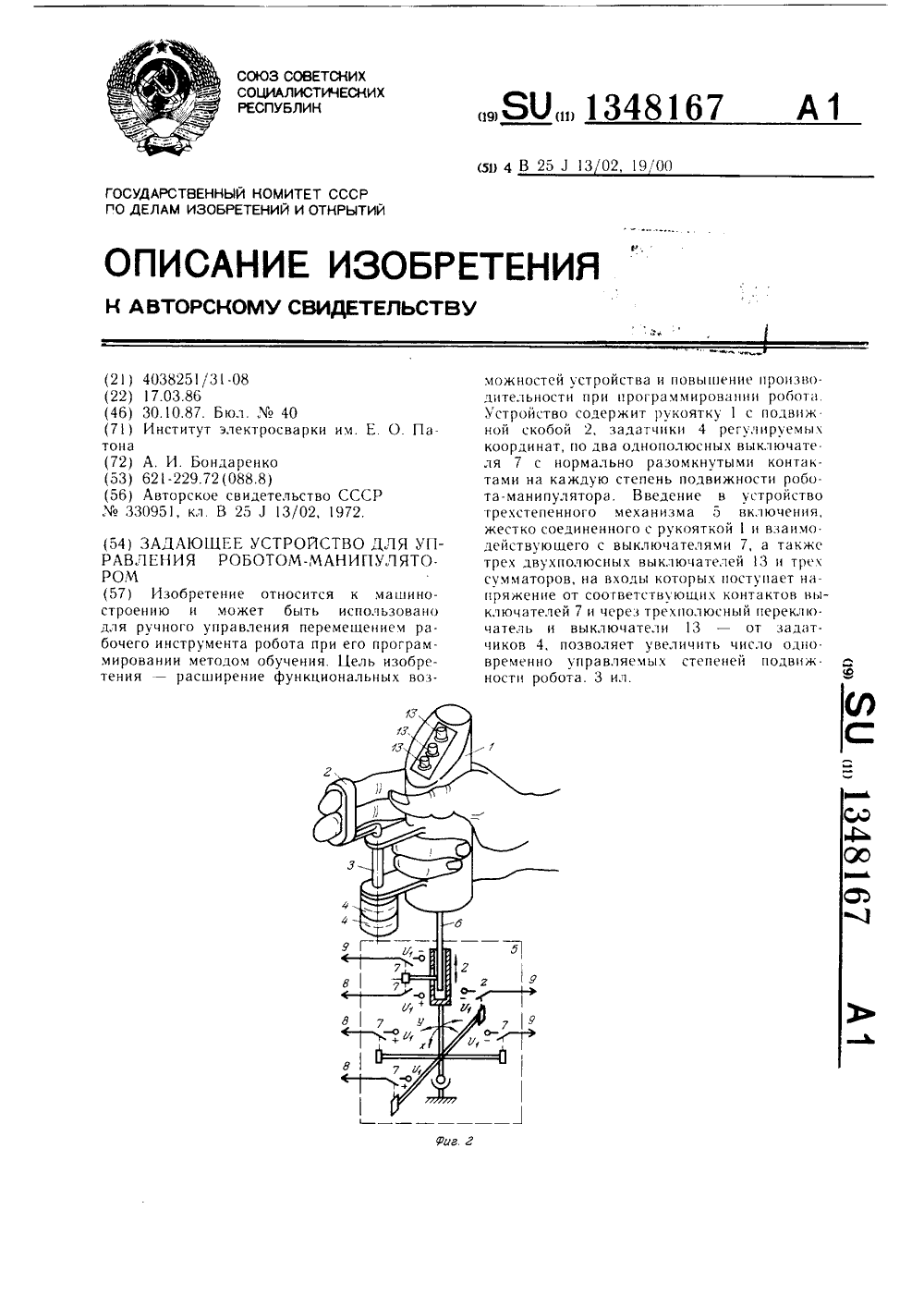
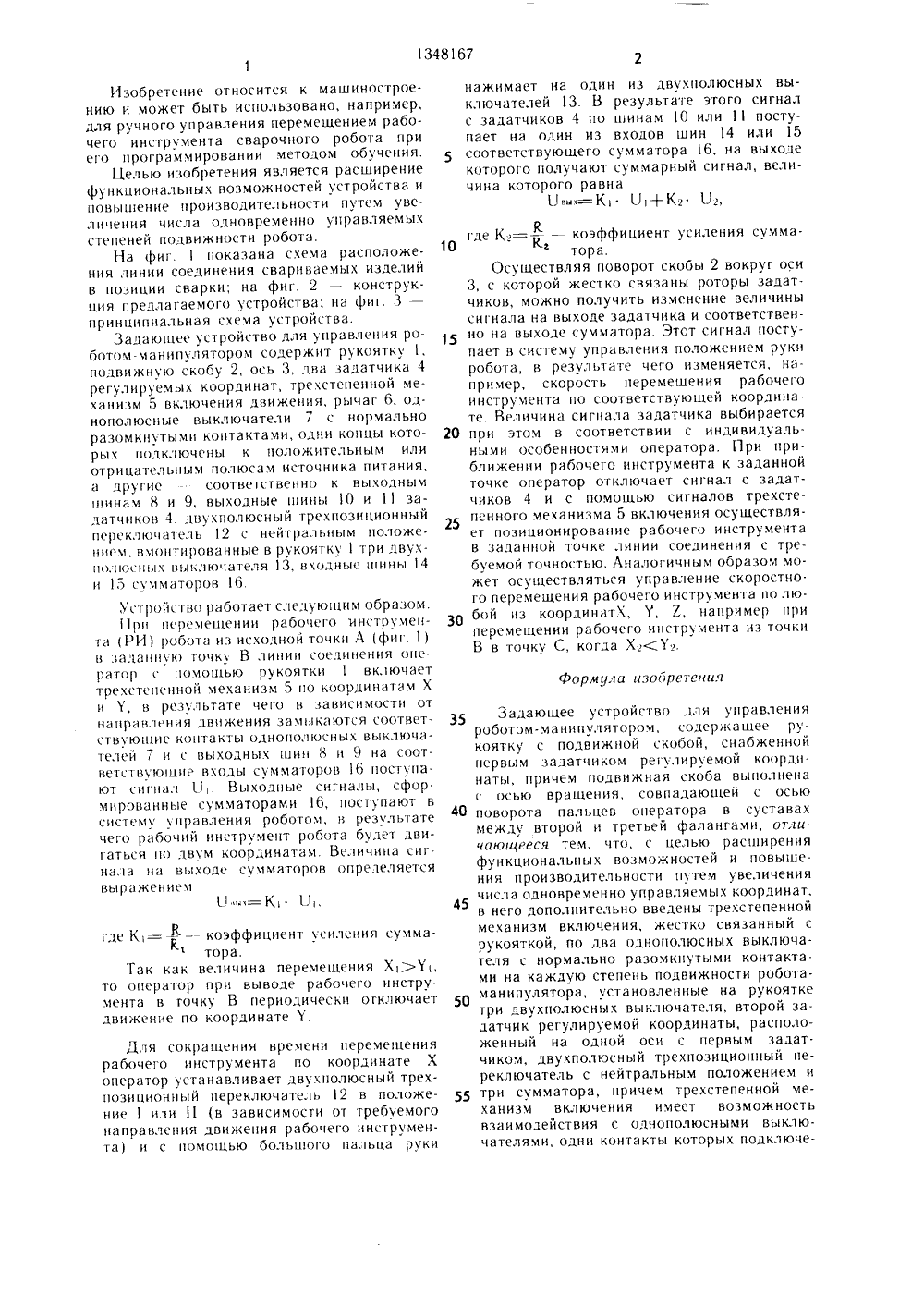
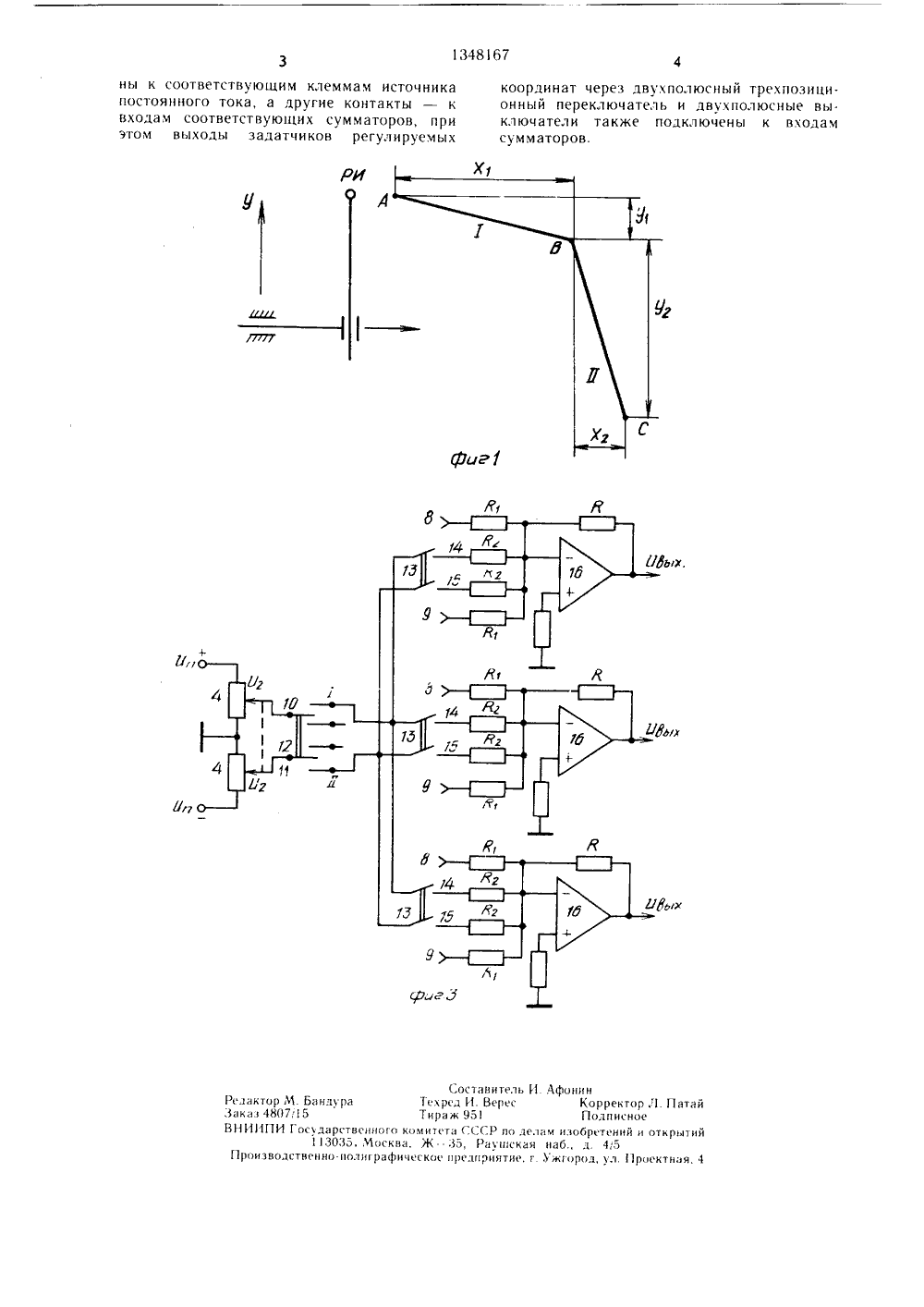
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 19) (11) А 51) 4 В 25,) 19/00 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 38251/31-0803.8610.87. Бюл.40ститут электросварк(2 ) 40 (22) 17 (46) 30 (71) И тона (72) А (53) 62 (56) А3309 м. Е И. Бондаренко -229.72 (088.8) торское свидетельств 1, кл. В 25 ) 13/02,СССР 1972.ТВО ДЛЯ УП НИПУЛЯТО(54) ЗАДАЮШЕЕ УСТРОЙСРАВЛ ЕНИЯ РОБОТОМ-МАРОМ(57) Изобретение относитсястроению и может бытьдля ручного управления перембочего инструмента робота примировании методом обучения.тения - расширение функцио к машиноспользовано ещением раего програмЦель изобреальных возГОСУДАРСТВЕННЫИ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ можностей устройства и повышение производительности при программировании робота. Устройство содержит рукоятку 1 с подвижной скобой 2, задатчики 4 регулируемых координат, по два однополюсных выключателя 7 с нормально разомкнутыми контактами на каждую степень подвижности робота-манипулятора. Введение в устройство трехстепенного механизма 5 включения, жестко соединенного с рукояткойи взаимодействующего с выключателями 7, а также трех двухполюсных выключателей 3 и трех сумматоров, на входы которых поступает напряжение от соответствующих контактов выключателей 7 и через трехполюсный переключатель и выключатели 13 - от задат. чиков 4, позволяет увеличить число одновременно управляемых степеней подвижности робота. 3 ил.Изобретение относится к машиностроению и может быть использовано, например, лля ручного управления перемещением рабочего инструмента сварочного робота при его программировании методом обучения.Целью изобретения является расширение функциональных возможностей устройства и повышение производительности путем увеличения числа одновременно управляемых степеней подвижности робота.На фиг. 1 показана схема расположения линии соединения свариваемых изделий в позиции сварки; на фиг. 2 - конструкция предлагаемого устройства; на фиг. 3 - принципиальная схема устройства.Залаюгцее устройство для управления роботом-манипулятором содержит рукоятку 1, подвижную скобу 2, ось 3, лва задатчика 4 регулируемых координат, трехстепенной механизм 5 включения движения, рычаг 6, олнополюсные выключатели 7 с нормально разомкнутыми контактами, олни концы которых подключены к положительным или отрицательным полюсам источника питания, з другие соответственно к выходным шинам 8 и 9, выходные шины О и 11 залатчиков 4, лвухполюсный трехпозиционный переключатель 12 с нейтральным положением, вмонтированные в рукояткутри двухполюспых выключателя 13, вхолные шины 14 и 15 сумматоров 16.Усп ройство работает слелующим образом, 1 ри перемегцении рабочего инструмента (РИ) робота из исходной точки А (фиг. 1) в здлзннук точку В линии соелинения опе. ратор с помоц 1 ью рукоятки 1 включает трехстепенной механизм 5 по координатам Х и У, в результате чего в зависимости от направления движения замыкдются соответствующие контакты однополюсных выключателей 7 и с выхолных шин 8 и 9 на соответсгвующие вхолы сумматоров 16 поступают сигнал (.1 Выходные сигналы, сфор. мированные сумматорами 16, поступают в систему управления роботом, в результате чего рабочий инструмент робота булет лвигаться по лвум коорлинатам. Величина сигнала нд выходе сумматоров опрелеляется выражением) ) ,= К(.) ,гле К= -- коэффициент усиления суммаК,тора.Так как величина перемещения Х)У, то оператор при выводе рабочего инструмента в точку В периолицески отключает движение по координате У.Для сокращения времени перемещения рабочего инструмента по координате Х оператор устанавливает Лвухполюсный трех- позиционный переключатель 12 в положение 1 или 11 (в зависимости от требуемого направления движения рабочего инструмента) и с помощью большого пальца рукинажимает на один из лвухполюсных выключателей 13. Б результате этого сигнал с залатчиков 4 по шинам 1 О или 11 поступает на один из входов шин 14 или 15 соответствующего сумматора 6, на выходе которого получают суммарный сигнал, величина которого равна1) выл=К+Кь гле К= -- коэффициент усиления суммаК2тора.Осуществляя поворот скобы 2 вокруг оси 3, с которой жестко связаны роторы залатчиков, можно получить изменение величины сигнала на выходе задатчика и соответственно на выходе сумматора. Этот сигнал поступает в систему управления положением руки робота, в результате чего изменяется, ндпример, скорость перемещения рабочего инструмента по соответствующей координате. Величина сигнала задатчика выбирается при этом в соответствии с инЛивидуальными особенностями оператора. При приближении рабочего инструмента к заданной точке оператор отключает сигнал с задатциков 4 и с помощью сигналов трехстепенного механизма 5 включения осуществляет позиционирование рабочего инструмента в заданной точке линии соединения с требуемой точностью. Лналогицным ооразом может осуществляться управление скоростно. го перемещения рабочего инструмента по любой из коорлинатХ, У, Х, например при перемещении рабочего инструмента из точки В в точку С, когла Хг(У. 10 15 20 25 30 Форм улц изобретени.в 35 40 45 50 55 Задающее устройство для управления роботом-манипулятором, содержащее рукоятку с подвижной скобой, снабженной первым залатчиком регулируемой коорлинаты, причем подвижная скоба выполнена с осью вращения, совпадающей с осью поворота пальцев оператора в суставах между второй и третьей фалангами, отличаюцееся тем, что, с целью расширения функциональных возможностей и повышения произволительности путем увеличения числа одновременно управляемых координат, в него дополнительно ввелены трехстепенной механизм включения, жестко связанный с рукояткой, по два однополюсных выключателя с нормально разомкнутыми контактами на каждую степень подвижности робота- манипулятора, установленные на рукоятке три двухполюсных выключателя, второй залатчик регулируемой координаты, расположенный на одной оси с первым заЛат. чиком, двухполюсный трехпозиционный переклюцатель с нейтральным положением и три сумматора, причем трехстепенной механизм включения имеет возможность взаимодействия с однополюсными выключатепями, олни контакты которых подключе1348167 ны к соответствующим клеммам источника постоянного тока, а другие контакты - к входам соответствующих сумматоров, при этом выходы задатчиков регулируемых РИ ьх Составитель И Арет И Верееьж 951та с,с:с,Р по делам35, Ра снская напрсдприятие, Г Уж Тех Тир нного комитМосква, Ж- играфииескос Редактор М. Бандура за к аз 4807,15 ВНИИПИ Государств 113035,Производственно.полкоординат через двухполюсный трехпозиционный переключатель и двухполюсные вы. ключатели также подключены к входам сумматоров,ОвинКорректор Л. ПатайПолписное1 зобрстений и открьпийб., л. 4,5город, ул. Проектная. 4
СмотретьЗаявка
4038251, 17.03.1986
ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
БОНДАРЕНКО АЛЕКСАНДР ИГНАТЬЕВИЧ
МПК / Метки
МПК: B25J 13/02, B25J 19/00
Метки: задающее, роботом-манипулятором
Опубликовано: 30.10.1987
Код ссылки
<a href="https://patents.su/3-1348167-zadayushhee-ustrojjstvo-dlya-upravleniya-robotom-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Задающее устройство для управления роботом-манипулятором</a>
Устройство для автоматического включения сигнала по достижении счетчиком определенногочисла

Номер патента: 288940
Опубликовано: 01.01.1971
Авторы: Барштак, Бурда, Ворожбиев, Дегт, Кричевер, Мезенцев, Срибнер, Шраго
МПК: B23B 11/00
Метки: включения, достижении, определенногочисла, сигнала, счетчиком
...датчика черезстко соединенную с втулкой По основному авт. св.131147 известно устройство для автоматического включения сигнала по достижении счетчиком определенного числа, датчик которого состоит из ярма и якоря. Ярмо содержит п стержнеи с обмотками, расположенными по периферии, и центральный стержень также с обмоткой. Вращаясь, якорь замыкает (в магнитном отношении) один из периферийных стержней, в котором наводится э. д. с. Однако из-за паразитного нерабочего воздушного зазора между ярмом и якорем плохо используется железо датчика и уменьшается его чувствительность.В предлагаемом устройстве все эстатки устранены.Достигаегся это благодаря тому, что якорь датчика выполнен с возможностью осевого перемещения.На фиг. 1 изображенразрез по...
Технологический инструмент рабочей клети прошивного стана

Номер патента: 428798
Опубликовано: 25.05.1974
Авторы: Московский, Потапов, Романцев, Сплавов, Финагин, Шейх
МПК: B21B 19/04
Метки: инструмент, клети, прошивного, рабочей, стана, технологический
...1.Технологический инструмент включает два 20 бочкоссразных, развернутых па угол подачи валка 1 и 2, две дисковые проводки Л и 4, установленные по разные стороны от оси прокатки, и оправку 5, выдвинутую носиком 6 зя пережим 7. Отношение расстояния а между 25 дисками к расстоянию б междуплоскости пережима составляет 100 - 1,05.Перед прошивкой бочкообразцыс валки 1 и 2 разворачивают ца угол подачи 14 - -20, дцсксвые проводки 3 и 4 устанавливают по разные стороны от оси прокатки, а носик о оправки 5 гыдвигают за пережим 7 валков 1 и 2. В процессе грошивки заготовки 8 отношение расстояния а к расстоянию б устанавливают равным 1,00 - 1,05.Прошивка с применением технологического ццструмецта с таким соотношением размеров позволяет улучшить...
Устройство для определения величины подвижности костных отломков

Номер патента: 856449
Опубликовано: 23.08.1981
Авторы: Извеков, Кирсанов, Королицкий, Корчагин
МПК: A61B 17/18
Метки: величины, костных, отломков, подвижности
...исвязанный с ним тензодатчик 3. На спицах1 и 2 установлены втулки 4 и 5, соединенные с помощью упругой пластины 6, атензодатчик 3 расположен на упругой пластине 6. Вулки 4 и 5 крепятся на спицах 1 и 2 с помощью винтов 7 и гаек 8.Устройство используют следующим образом.При положении больного лежа для оп,ределения степени подвижности отломковв какой-либо плоскости остабляют гайки8, поворачивают винты 7 с прикрепленной к нему упругой пластиной 6 так,чтобы линия действия нагрузки, приклады856449 Составитель Ю. АлмазовРедактор Н, Егорова Техред МРейвес Корректор Н. Сте Заказ 7033 КЗВНИИПИ Г 113 О 35, М 68 Подписта СССРытий Гира жар ствекного обретеннй н оскваф ф " е Ра д. 4/5 ая н Фелиал ППП Патент", г. Уааарод, ул. Проектная ваемой к...
Устройство для подачи инструмента и материала в рабочую зону обрабатывающей машины

Номер патента: 578144
Опубликовано: 30.10.1977
Авторы: Кузьменков, Курносов, Пименов, Семенов, Успенский, Федоров, Четин
МПК: B21D 43/18
Метки: зону, инструмента, обрабатывающей, подачи, рабочую
...для подачи инструмента и материала содержит раму 1, соединенную с плитой 2 пресса 3, закрепленные на раме опорные рол;1 ки 4, рОлик 11 5, ОС 11 6 вращен 11 Я кОтОрых О закреплены на конце двуплечего рычага 7, закрепленного на раме 1 прп помощи осей 8 и связанного с тягой 9, снабженного приводом 10.Ролики 5 выполнены нз наружного 11, внут реннего 12 и амортизационного 13 колец.Позицией 14 обозначен инструмент или материал.Устройство работает слсду 1 ощим образом, Перед включением привода перемещения 0 инструмента или материала 14 оси 6 роликов5 устанавливают в требуемое положение, перемещая тяги 9 приводом 10, При движении инструмента или материала 14 ролики 5 обеспечивают перемсн 1 ение его под углом к на правлению подачи,...
Устройство для включения звукового сигнала транспортного средства

Номер патента: 695870
Опубликовано: 05.11.1979
Авторы: Дуплянкин, Карелина, Леушканов, Немцов
МПК: B60Q 5/00
Метки: включения, звукового, сигнала, средства, транспортного
...достигается тем, что упругиеконтактные пластины жестко закреплены одним концом на спице рулевогоколеса, а вторым концом установленыс возможностью взаимодействия с торцом ступицы, при этом в спицах рулевого колеса выполнены отверстиядля толкателей, установленных навключателе сигнала,На чертеже показано предлагаемое устройство, общий вид.Устройство содержит ограниченноподвижный включатель 1 сигнала,.установленный с наружной стороныступицы 2 рулевого колеса 3 с помощью стоек 4 и пружин 5, На включателе 1 сигнала выполнены толкатели б, которые изготовлены за одно целое с включателем или жесткокрепятся на нем. Толкатели 6 постоянно упираются в упругие контактные пластины 7 через отверстия 8 вспицах 9, причем пластины 7 однимконцом жестко...
Предыдущий патент: Промышленный робот
Следующий патент: Схват манипулятора
Случайный патент: Грузозахватное устройство