Патенты с меткой «следящая»
Следящая система для воспроизведения фотозаписи

Номер патента: 1317397
Опубликовано: 15.06.1987
МПК: G05B 11/01
Метки: воспроизведения, следящая, фотозаписи
...и 3). По достижении сигналом х(с) уровня срабатывания компаратора 22 условие тактирования по С 2-входу счетчика 12 нарушается, так как на инверсном входе элемента И 18 Формируется логическая единица.В период между срабатываниями компараторов 17 и 22 (последний формирует сигнал экстремума) разрешена 45 запись информации в счетчик 12 при разрешении на Й-входе, так как при срабатывании одновибратора 10 Й 5- триггер установлен в Й-состояние, причем в Й-состояние устанавливаются также триггеры 24 и 25 каналов 21 масштабирования.Далее при возрастании уровней сигнала х(1) последовательно срабатывают компараторы 22 - 22каналов 21 масштабирования. Например, при срабатывании компаратора 22 (переход в состояние "1") срабатывает триггер 25, так как...
Комбинированная следящая система с люфтом

Номер патента: 1318989
Опубликовано: 23.06.1987
Автор: Видилин
МПК: G05B 11/01
Метки: комбинированная, люфтом, следящая
...блока 8 скоростной обратной связи и сигнала с выхода первого дифференциатора 9, вводимого 35для компенсации динамической ошибкиследящей системы. Полученный управляющий сигнал с выхода первого сумматора 3 через второй усилитель 4подается на вход исполнительногодвигателя 5. Редуктор 6 приводитсяв движение исполнительным двигателем 5. Уменьшение ошибки от люфтапроисходит следующим образом. С помощью интегратора 10 и второго сумматора 11 измеряется текущая величина люфта, и сигнал, пропорциональный этой величине, формируется навыходе второго 11 сумматора. С помощью дифференциатора 12 определяется . 50величина, пропорциональная скоростиизменения люфта и поступает на информационный вход регулируемого ограничителя 13, где ограничиваетсяпо...
Следящая система с переменным моментом инерции

Номер патента: 1322228
Опубликовано: 07.07.1987
МПК: G05B 11/01
Метки: инерции, моментом, переменным, следящая
...пропорционален моменту инерции шг груза, переносимого в схвате.Сигнал с информационного выхода датчика 5 перемещения поступает также на перный вход третьего блока 16 разности, на второй вход которого поступает сигнал, пропорциональный конструктивной константе с = г - г, с выхода первого источника 19 постоянного сигнала.Сигнал на выходе третьего блока 16 разности пропорционален г, т.е. радиусу, на котором перемещается центр масс подвижных частей руки. Блок 17 осуществляет возведение н квадрат сигнала г а блок 18 усиливает этот сигнал с коэффициентом, пропорциональным массе ш, подвижных частей руки. Коэффициент усиления блока 18 определяется величиной сигнала, поступающего на его управля-, ющий вход с выхода второго источника 20...
Следящая система

Номер патента: 1325402
Опубликовано: 23.07.1987
МПК: G05B 11/01
Метки: следящая
...воздейстгцпо, поступает на второй вход сум". матора 5. В момент приложения ступенчатого вхоцного воздействия по первому входу системы на выходе блока 11 управления Формируется сигнал управления, представляющий собой последовательность импульсов, количество которых определяется порядком системы и наложенными ограничителями, а длительность определяется настройкой преобразователей и является пропорциональной величине входного сигнала.Блок управления работает следующим образом,При поступлении положительного скачкообразного входного сигнала на преобразователе 13 появляется импульс положительной полярности амплитудойдлительностью, определяемой параметрами настройки я пропорциональной величине входного игнала, по окончании этого...
Следящая система с ограниченным углом поворота выходного вала

Номер патента: 1339488
Опубликовано: 23.09.1987
Авторы: Архангельский, Коротков, Петухова, Семенов, Тумаков
МПК: G05B 11/14
Метки: вала, выходного, ограниченным, поворота, следящая, углом
...2 непосредственно к источнику 13 напряжейия питания, форсируя тем самым поток возбуждения исполнительного электродвигателя 2, Его пусковой момент увеличивается, а сле.довательно, и увеличивается ускорение разгона системы, что обеспечивает более быстрый выход из конечного положения в рабочую зону.При сходе системы с концевых выключателей сигнал с выхода блока 4 . концевых выключателей пропадает, в результате чего пропадает сигнал на выходе элемента И 8, Ключ 9 размыкается и подключает обмотку 11 возбуждения к источнику 13 напряжения питания через резистор 10, обеспечивая тем самым номинальное возбуждение исполнительного электродвигателя 2 при нахождении в рабочей зоне.Рассмотрим эффект, получаемый при форсировке возбуждения...
Следящая система

Номер патента: 1352451
Опубликовано: 15.11.1987
Авторы: Матюхина, Михалев, Паромчик
МПК: G05B 11/01
Метки: следящая
...6, Р 9 и ПУ 2;Т - электромеханическая постоянная времени БДПТ 6;К - коэффициент передачиот выхода ПУ 2 до выхода выпрямителя 3;а - скорость линейной заводки 6; = а.Как следует из фиг. 1 и уравнений (1) - (3),предлагаемая следящая система является системой с переменной структурой, причем переключение с одной структуры на. другую определяет. ся соотношением между значениями ядр х и ядр х (всего возможны четыре различных структуры).В качестве фазовых координат системы выберем я, х и х. Тогда переключение с одной структуры на другую будет происходить на плоскостях х = 0 и х = 0 этого фазового пространства. Скользящие движения в системе возможны только при х= О, поэтому сформируем поверхность переключения 8 в ниде нная времени блока...
Следящая система управления валом гидрораспределителя гидравлического ковочного пресса

Номер патента: 1361020
Опубликовано: 23.12.1987
МПК: B30B 15/26
Метки: валом, гидравлического, гидрораспределителя, ковочного, пресса, следящая
...сигнал, пропорциональный квадрату скорости движения штока гидроцилиндра. Этот сигнал поступает на вход усилителя 1. На другой 5 вход усилителя 1 поступает электрическийсигнал, пропорциональный координате положения штока гидроцилиндра 5, из датчика 4 обратной связи по положению, связанного со штоком гидроцилиндра. При приближении текущего значения угла поворота вала гидрораспределителя к заданному значению угла усилитель 1 через электромеханический преобразователь 2 управляет гидроусилителем 3 таким образом, чтобы обеспечить следующее соотношение 15 Ч 2 а 8где Ч - скорость штока гидроцилиндра;а - ускорение торможения штока;5 - остаток пути между текущим и заданным значением координаты штока гидроцилиндра.20 Таким образом, при...
Пневматическая следящая система для управления бесцентрошлифовальным станком

Номер патента: 1362613
Опубликовано: 30.12.1987
Авторы: Аничков, Березовский, Волков, Фирсов
МПК: B24B 51/00, G05B 11/44
Метки: бесцентрошлифовальным, пневматическая, следящая, станком
...износа давление на входе 41 управленця второго струйного дискретного элемента 42 снижается до порогового значения, при котором происходит переброс струи с прямого выхода 47 второго струйного дискретного элемента 42 на его инверсный выход 48 и возникновение давления на входе 49 управления третьего струйного дискретного элемента 50, что в свою очередь вызывает переброс с инверсного выхода 56 в прямой выход 53 третьего струйного дискретного элемента 50. Это приводит к возникновению давления на входе 54 включения и к исчезновению давления на входе 57 выключания третьего реле 55 времени. В случае наличия давления на входе 54 включения третьего реле 55 времени в течение времени настройки его выдержки с выхода 58 третьего реле 55...
Электрогидравлическая следящая система

Номер патента: 1363133
Опубликовано: 30.12.1987
Автор: Фомин
МПК: G05B 11/01
Метки: следящая, электрогидравлическая
...напряжение сумматора 7;ц, - выходное30напряжение первого детектора 18;1 ЬП- выходное напряжение нторогодетектора 20; 4 ЬН 1 - выходноенапряжение блока деления 21; Б,выходное напряжение измерителя расо 35согласования 6; 1 - выходное напряжение задатчика 19; Б с - выходное напряжейие датчика 5 обратнойсвязи; 1 у - выходной ток преобразователя 1 напряжение - ток; Н,1- на-,40пряжение и ток обмотки 28 управления,Система работает следующим образом.При подаче сигнала П с задатчи 9ка 19 на выходе измерителя 6 рассогласования появляется напряжение Б,которое поступает на вход преобразователянапряжение - ток и преобразуется в нем в выходной ток управления 1 , который сохраняетсянеизменным при П = сопят и при изменении сопротивления обмотки...
Следящая система

Номер патента: 1366990
Опубликовано: 15.01.1988
Автор: Стрижков
МПК: G05B 11/01
Метки: следящая
...выходе первого вычитателя 4 не достигает нуля, а становится знакопеременной с частотой помехи,Для устранения автоколебаний и повышения точности регулирования всистеме при каждой смене знака ошибки Формирователь 11 импульсов формирует импульс,.переводящий в "0"блок 12 памяти. В этом состоянииключ 13 закрывается и не пропускаетимпульсы ошибки в реверсивный счетчик 7, т.е. создается режим, соответствующий режиму работы системы принулевой ошибке, когда импульсы ошибкине поступают на реверсивный счетчик 7.Для обеспечения воэможности перемещения объекта 1 из этого устойчивогоположения, необходимо вывести блок 12памяти из состояния "О" и открытьключ 13 при отсутствии изменения зна"ка ошибки в интервалах времени междуимпульсами ошибки. Для...
Следящая система

Номер патента: 1368855
Опубликовано: 23.01.1988
Авторы: Галахов, Максаев, Петухов, Тимашов
МПК: G05B 11/00
Метки: следящая
...якорь которого перемещается и замыкает с помощью механической муфты 14 сцепления кинематическую цепь от вала электродвигателя 7 до движка второго датчика 11 положения.Таким образом, на входы второгосумматора 5 поступают сигналы с первого 9 и второго 11 датчиков положения,равные по величине, но противоположные по знаку, вследствие чегорассогласование на выходе второго 26 сумматора 5 в этом режиме всегдабудет равно нулю. Перемещая рукоятку2 управления, оператор тем самым задает величину управляющего напряжения на входе усилителя 6, соответствующую требуемому значению угловойскорости выходного вала электродвигателя 7. Угловая скорость измеряетсядатчиком 8 скорости и при отклонениискорости выходного вала нагрузки отзаданного значения на...
Цифровая динамическая следящая система

Номер патента: 1368856
Опубликовано: 23.01.1988
Автор: Шкирятов
МПК: G05B 11/14
Метки: динамическая, следящая, цифровая
...группой управляющих выходовдискриминатора 9, и выход 30-5, являющийся его управляющим входом.Следящая система работает следующим образом,На первый вход смесителя 1 поступает входной сигнал видасово),+ и 3 )+Ц + )(а)1,)С+ Ц 1),гдев каждый момент времени С принимает одно из трех значений (1,0-1), а ц) и м)- соответственно доплеровские сдвиги несущей и модулирующей частот. На второй вход смесителя 1 с выхода цифрового управляемого генератора 11 поступает сигнал оценки доплеровской частоты несущейл л сов Г (и), +Ы)с+М,1. (2)В результате перемножения этихсигналов на выходе смесителя 1 образуются колебания с комбинационными 5частотами из которых с помощью поФлосового фильтра 5 выделяется сигнал верхней боковой частотысов(и)+ЬоС+-М...
Цифровая динамическая следящая система

Номер патента: 1368857
Опубликовано: 23.01.1988
Автор: Шкирятов
МПК: G05B 11/14
Метки: динамическая, следящая, цифровая
...динамической слсдящей системы, В синхронизаторе 27 с помощью счетчика-делителя 28 и дешифратора 29 вырабатываются 1 с (в денном случае 1-8) сдвинутых относительно друг друга на период частоты счетных импульсов управляющих импульсов, из которых с помощью Ю-триггеров ЗО 31 и схемы ИЛИ 32 в кажгом 1 3 ь 1 ери - тельном цикле формируются управ.няющие сигналы 33-133-4, которые управляют работой цифрового фильтраэкстраполятора 3,. а управляющий сигнал 33-5, наряду с управлением рабо"ой цифре ного генератора 9 нс пользуется для переключения триг,ера 2 в нулевое состояние, при котором 2 эсчетные импун;сы через открь.тый вентиль 23 поступаю-. на счетный вход реверсивного с етчика 25. 11 реднарительно первым выходным импульсом дешифратора 29...
Следящая система

Номер патента: 1376061
Опубликовано: 23.02.1988
Авторы: Балалаев, Гайдук, Колесников, Сотников
МПК: G05B 11/10
Метки: следящая
...разность показаьий датчиков 6 и 9 положения равна нулю. Далее в системе осущест"35 вляется несколько проходов люфта,связанных с определением величины люфта в блоке 11 определения величины люфта, т.е. переходной процессконтура компенсации люФта в системе. 40 Если триггер 30 после включения питания находится в нулевом состоянии то переходной процесс в системе начинается при Ц =А, где А - разность показаний датчиков 6 и 9 положений, 45 но порядок функционирования системы во время переходного процесса остается тот же.Рассмотрим порядск функционирования системы при изменении величины люфта в процессе работы. Пусть величина люфта уменьшилась, тогда в конце отработки люфта сигнал УО. В этом случае, так как сигнал 118 =О, срабатывает компаратор...
Следящая система

Номер патента: 1383286
Опубликовано: 23.03.1988
Авторы: Пономарев, Соколов, Тимашов
МПК: G05B 11/00
Метки: следящая
...1) поро 1гового устройства соответствует большая величина напряжения на выходе цифроаналогового преобразователя 10, приходящаяся на единицу младшего разряда реверсивного счетчика 9,Система работает следующим образом.Сигнал О с выхода блока 2 выделения ошибки, прохоця через сумматор 3, попадает на вход усилителя 4, где усиливается до значений, необходимых для управления исполнительным элементом 5.25 Одновременно сигнал с выхода блока 2 выделения ошибки поступает навход канала коррекции, состоящегоиз и параллельных аналогичных кана 5лов. Сигналы всех и каналов суммируются на сумматоре 3.Предположим, что в процессе слежения ошибка системы достигает некоторой величины П,. При этом напряжение на выходе корректирующего усилителя 6...
Следящая система управления валом главного клапанного распределителя гидравлического ковочного пресса

Номер патента: 1388326
Опубликовано: 15.04.1988
МПК: B30B 15/16
Метки: валом, гидравлического, главного, клапанного, ковочного, пресса, распределителя, следящая
...сигнал, пропорциональный квадрату скорости, приходит на вход сумматора 2 с выхода функционального преобразователя 10, связанного через датчик 11 скорости со штоком силового гидроцилиндра 4. Сумматор 2, воздействуя на электромагнитный кран 8, вызывает подключение между управляемой полостью силового гидроцилиндра 4 и электрогидравлическим усилителем 3 формирователя 6 торможения, причем непосредственная связь между управляемой полостью силового гидроцилиндра 4 и электро- гидравлическим усилителем 3 прерывается электромагнитным краном 8.Так как полость над поршнем 15 формирователя 6 торможения связана с управляемой полостью силового гидро- цилиндра 4 (давление в которой пропорционально усилию сопротивления, приведенному к штоку силового...
Релейная следящая система

Номер патента: 1399696
Опубликовано: 30.05.1988
Авторы: Григорьев, Куличенко, Негробов, Петренко
МПК: G05B 11/10
Метки: релейная, следящая
...масштабный блок 3 и второй блок 4 умножения не проходит, потому что на выходе первого элемента И 16 формируется нулевой сигнал, определяемый состоянием четвертого реле 15, обладающего статической характеристикой+1 при У ) О,бО при Уг ( О где Б выходной сигнал блока 22 , сравнения знаков,и Формирующего на .своем выходе сигнал Б, = +1, так как з 8 пх = з 1 п , состоянием третьего реле 6, обладающего статической характеристикой где ), - выходной сигнал первого сумматора 5,и формирующего на своемвыходе сигнал 0 = О, так какз 8 пО. Кроме того, выходной сигнал тахогенератора 14 через четвертый блок не проходит на третий входвторого сумматора 21, потому что пятое реле 18, обладающее статическойхарактеристикой где Б - выходной сигнал блока ф...
Следящая система

Номер патента: 1401436
Опубликовано: 07.06.1988
Автор: Смирнов
МПК: G05B 11/00
Метки: следящая
...скоростной ошибки 6 масштабным блоком 10 и подается на третий (неинвертирующий) вход сумматора 3, Под действием такого дополнительного компенсирующего сигнала отрабатывающая ось следящей системы следит за задающей без скоростной ошибки 0 ,Системы, использующие жесткие тахометрические связи, имеют малую добротность по скорости (К =100-200 1/с)) но обладают достаточно широкой полосой пропускания, а следовательно, и высокой добротностью по ускорению (К 10000 1/с) . Ошибка по ускорению О следящей системы мала ло сравнению с ошибкой по скорости 9 и моментной ошибкой 6 , поэтому в известной системе за счет применения дополнительного компенсатора устраняется ошибка по скорости Я, а ошибка системы 6., как следует из выражения (1), определяется...
Электрогидравлическая следящая система

Номер патента: 1405024
Опубликовано: 23.06.1988
МПК: G05B 11/01
Метки: следящая, электрогидравлическая
...частот и амплитудногодетектора 7 с усреднением, так чтона его выходе образуется медленноменяющееся напряжение П , пропорциональное зависимости скоростной характеристики гидродвигателя 3 от температуры рабочей жидкости. Опорные нап 1 1 3ряжения Б,4, Ц, , Б, поступают свыходов источника 14 напряжения наопорные входы компараторов 9 - 11 ипри отсутствии сигнала Б удерживаюткомпаратора 9 - 11 в положении, когда на их выходах сигналы 11, Б,оонотсутствуют. Следовательно, коэффициент передачи суммирующего усилителя8 остается неизменным и равным своему номинальному значению. При разогре"ве рабочей жидкости появляется напряжение Б, свидетельствующее об изменении характеристик следящей системы, которое поступает на сигнальныевходы компараторов...
Цифроаналоговая следящая система

Номер патента: 1405025
Опубликовано: 23.06.1988
Авторы: Игнатченко, Кротенко, Пискарев, Синицын, Толмачев, Томасов
МПК: G05B 11/26
Метки: следящая, цифроаналоговая
...и 3 усилителя 7 и далеена входы интегрального 17 и пропорци онального 1 б регуляторов (фиг.2).Выходные сигналы регуляторов 16 и 17 суммируются в сумматоре 18, Выходной сигнал сумматора 18, являющийся сигналом задания по току контура ре гулирования тока, подается на третий вход сумматора 19. На первый вход сумматора 19 подается сигнал 1 с выхода датчика 6 тока. На второй вход сумматора 19 подается сигнал вычис ленного статического момента Мна валу двигателя 1. Сигнал с выхода сумматора 19 Через пропорционально-интегральный регулятор 20 тока подается на вход широтно-импульсного 55 преобразователя 21. Выходной сигнал преобразователя 21 поступает на выход усилителя 7 и далее через датРабота блока 12 динамической коррекции протекает следующим...
Фазочастотная следящая система
Номер патента: 1409969
Опубликовано: 15.07.1988
Автор: Тыщенко
МПК: G05B 11/26
Метки: следящая, фазочастотная
...о т знак а разности частот1 Р - Р ст , е . о т того, какой сигналприсутствует на выходе импульсногоч асто тно "фа з ово го дискриминатора 3 -"О " или " 1 " .Постоянное напряжение 1 Бпоступает на коммутатор б, который управ "ляет двигателем 7 , Происходит разгонили торможение двигателя, а сл едовательно , увеличение или уменьшениечастоты Р р , поступающей с датчика 8на импульсно -фазовый детектор и им"пульсный частотно-фазовый дис криминато р . В результате и риближения частоты обратной связи Р О с к опорнойчастоте Р ра эно с ть з тих частотуменьшается, В к акой-то момент ра зница частот ) Р -Р рстановится меньшей полосы захватаФ Р 1, т. е,происходит захват частоты, и на выходе Фазового дискриминатора 2 появляется...
Следящая система
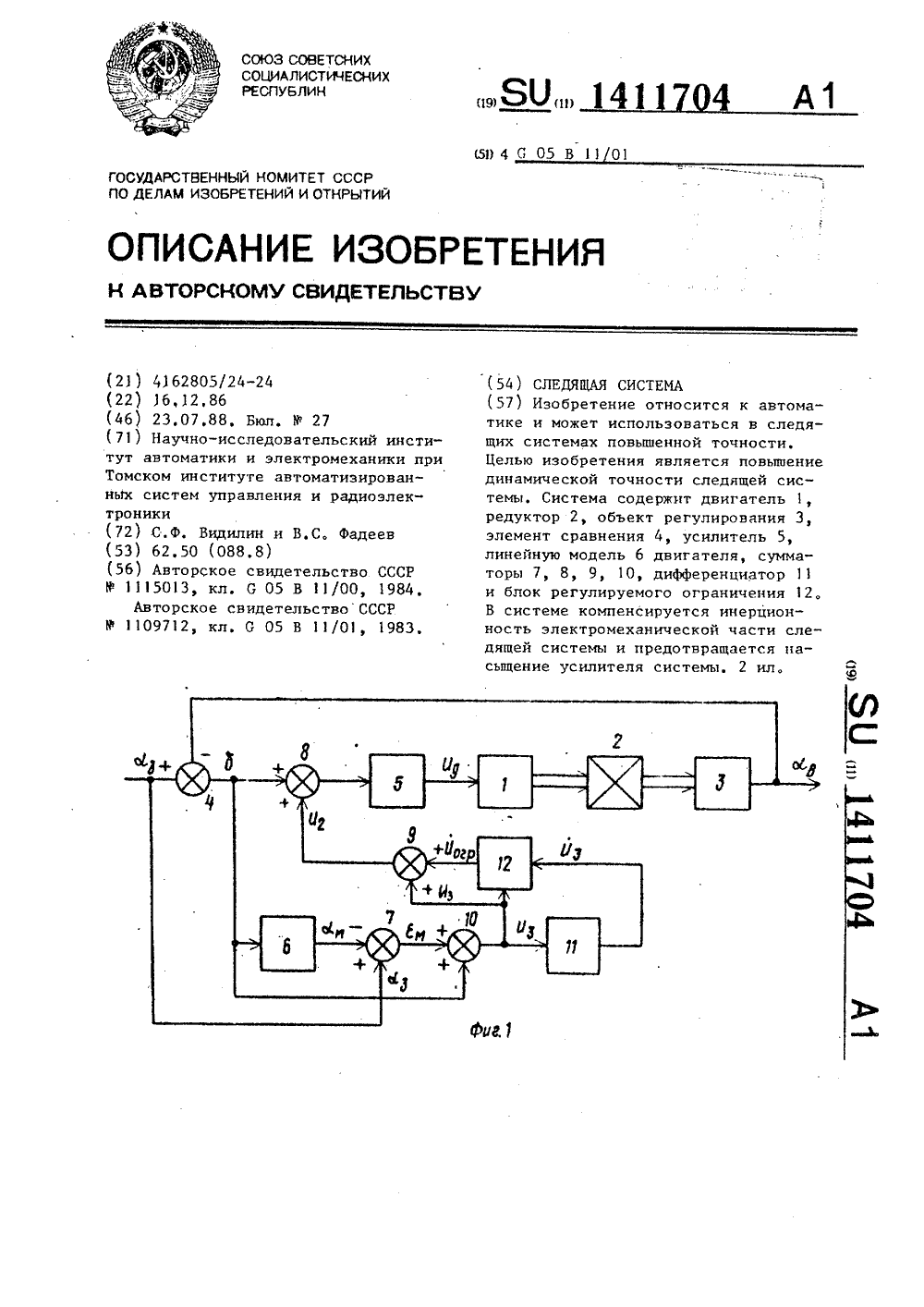
Номер патента: 1411704
Опубликовано: 23.07.1988
МПК: G05B 11/01
Метки: следящая
...П уровень ограничеЬ ния увеличивается, для того чтобы двигатель быстрее отрабатывал возмущающие воздействия. После отработки сигнал П уменьшается При уменьшении величины сигнала Уз уровень ограничения блока 12 также уменьшается, чтобы не насьщался усилитель 5 (фиг.2).55Перенесение второго сумматора 8 на вход усилителя 5 упрощает систему ввиду того, что цеп усилитель-двигатель в следящих системах являетсясиловой цепью, т,е. в ней имеютсябольшие напряжения и протекают большие токи по сравнению с другими блоками и цепями следящей системы,Следящая система работает следующим образом.При появлении входного сигналасистемы о( на выходе элемента 4 сравнения появляется сигнал Г, который,пройдя через второй сумматор 8, усиливается усилителем 5...
Следящая система

Номер патента: 1413596
Опубликовано: 30.07.1988
Авторы: Бондарев, Самедов, Червяков
МПК: G05B 11/01
Метки: следящая
...не вызоветперерегулирования, выходящего за пределы этой зоны,При малых, меньших Е, значенияхсигнала рассогласования выходные сиг"налы первого и второго пороговых блоков 8 и 9 равны нулю и соответствен"но на первом и втором входах суммирующе-корректирующего усилителя 13сигналы отсутствуют. При этом благо"даря сигналу смещения (не указан) навыходе корректирующего усилителя 13имеется сигнал, соответствующий значению К = 1 и напряжению обратнойсвязи Б = БЭ . Когда сигнал рассогласования увеличивается вследствиеизменения задающего воздействия илинагрузки двигателя 4 и его модульнаходится в пределах Ес/Я/сд,навыходе первого 8 порогового устройст"ва появляетсясигнал Я( -;, который усиливается инвертирующим усили"телем 11 и поступает на...
Цифровая следящая система

Номер патента: 1416936
Опубликовано: 15.08.1988
Авторы: Гостев, Сватов, Стрижнев
МПК: G05B 15/02
Метки: следящая, цифровая
...сигнала " 1" .Число импульсов, накапливаемых в счетчике 16, определяется значением сигнала разности Б (кода ошибки) и вре 1менем присутствия на входе цифровогоизмерителя 9 скорости сигнала " 1"(скоростью изменения выходной величины). Если при подсчете входных импульсов наступит полное заполнениесчетчика 16 то срабатывает схема И-НЕ17, выходной сигнал которой закрывает элемент И 15. Состояние же регистра 18 памяти соответствует текущемусостоянию счетчика 16.При значениях младшего разряда1 сигнала В;, соответствующего кО, визмерительном канале 11 осуществляется перевод регистра 18 памяти по входу управления записью в режим памяти,сброс счетчика 16 по входу к в "0"и подключение коммутатором 13 инверсных выходов регистра 18 памяти...
Электрогидравлическая следящая система

Номер патента: 1418506
Опубликовано: 23.08.1988
Автор: Васильев
МПК: F15B 9/03
Метки: следящая, электрогидравлическая
...задатчика,Система содержит последовательно связанные задатчик (не изображен), сумматор 1усилитель 2 мощности, электромеханический преобразователь 3 и гидроусилитель 4с выходным каскадом, имеющим подвижный элемент, например, золотник 5, размеЩенный в корпусе 6, и датчик 7 обратной связи по положению золотника 5,связанный через усилитель 8 обратной связа и блок 9 с зоной нечувствительности, пропорциональной величине рабочегохЬда золотника, с отрицательными входми сумматора 1, положительный входквторого соединен с задатчиком, а выход -с электромеханическим преобразователем 3.Электрогидравлическая следящая система работает следующим образом.При подаче задающего сигнала черезсумматор 1 и усилитель 2 на электромеханический преобразователь...
Следящая система управления валом главного гидрораспределителя гидравлического пресса

Номер патента: 1423425
Опубликовано: 15.09.1988
Авторы: Борсук, Устинов, Швецов
МПК: B30B 15/16
Метки: валом, гидравлического, гидрораспределителя, главного, пресса, следящая
...что приводит к закрытию клапана двухклапанного распределителя 11.Таким образом, закрытие клапана двухклапанного распределителя 11 начинается при остатке пути между штоком силового гидроцилиндра 12 и точ" кой позиционирования, равном постоян-. ной величине. Время закрытия клапана, а следовательно, время торможения штока силового гидроцилиндра 12 зависит от проходного сечения переменного дросселя, образованного нижним конусом штока 18 и втулкой 17 блока 7 коррекции.Так как рабочая жидкость из двухклапанного распределителя 11 поступает в силовой гидроцилиндр 12 через блок 7 коррекции, отжимая верхний конус штока 18 от втулки 16, а высота подъема штока 18 при эта пропорциональна квадрату расхода жидкости через дроссельную щель,...
Следящая система

Номер патента: 1425595
Опубликовано: 23.09.1988
Авторы: Матюхина, Михалев, Паромчик
МПК: G05B 11/01
Метки: следящая
...должна удовлетворять условиюсуществования скользящего режима всистемах с переменной структурой С учетом уравнений динамики предлагаемой следящей системы:, =хйе фсй К 1КККча=Т Т Т е)- = -а - -х - -е-е - (К х+(УО вРпБ коэффициент передачи интег"ратора 11,при всрп у 1 вдрпБ;О при вдрк у вдрпБ,коэффициент усиления первого усилителя 2,электромеханическая постоянная времени БЛПТ 5, 1425595К - коэффициент передачиК - коэффициент передачи редуктора Зв 5К - коэффициент передачи отвыхода усилителя 2 до выхода выпрямителя 9а " скорость линейной заводки6;=ае. 1 ОИз формулы (2) путем дифференцирования получают КчТк Тк . ККЛКБ а а + (1 -- )х - " -15"(К х + 1 у)зз.рпБ. - (5) Так как при Б - "О, Тх = -х, то из формулы (5) следует 20 Юз" - Т а - А-...
Двухканальная следящая система с разделенной нагрузкой

Номер патента: 1425597
Опубликовано: 23.09.1988
Авторы: Кузнецов, Прокопенко
МПК: G05B 11/01
Метки: двухканальная, нагрузкой, разделенной, следящая
...р+с р 2+с,р+где с целью обеспечения астатизма второго порядка по управляющему воздействию принимается сЬ и с,:ЬАналогичным образом Формируется динамика и второго канала.Таким образом, в двухканальной системе могут быть реализованы оптимальные операторы каналов, что нозво" ляет существенно уменьшить дисперсию ошибки следящей системы при случайных входных сигналах,Формула и з о б р е т е н и я Двухканальная следящая система с разделенной нагрузкой, содержащая первый чувствительный элемент, пер" вый вход которого является первым входом системы, первый усилитель сигнала ошибки, входом соединенный с выходом первого чувствительного эле- мента, первый усилитель мощности, первый исполнительный двигатель, входом соединенньщ с выходом первого...
Цифровая самонастраивающаяся следящая система

Номер патента: 1425601
Опубликовано: 23.09.1988
Авторы: Лебедев, Морщихин, Шароватов
МПК: G05B 13/02
Метки: самонастраивающаяся, следящая, цифровая
...модели 20 Ущ(п) поступают, соответственно, на второй и первый входы первогосумматора 1, на котором вычисляетсяих динамическое рассогласование (невязка) 9 (п) = У (и) - У(п) .При отклонении параметров элементов системы от исходных значений сигнал динамического рассогласования отличен от нуля, что инициирует работу блока 12 управления реверсивным счетчиком, который анализирует знак величины где В8, 6- максимальное, минимальное и амплитудное значение невязки на интервале собственных колебаний системы.Алгоритм настройки несущей частоты напряжения питания двухфазного асинхронного двигателя определяется рекуррентным соотношением Е(п+1) = Г(п)+ьГ вЦп К где и - номер шага настройки частоты; Ь Г - шаг настройки частоты, выбираемый из условия...
Следящая система

Номер патента: 1427327
Опубликовано: 30.09.1988
Авторы: Баранов, Гостев, Кобяков
МПК: G05B 11/01
Метки: следящая
...импульеую тактового генератора 10 подаются Иа вход счетного триггера 13, который осуществляет своими импульсами на прямом и инверсном выходе коммутацию ключей 17 и 19 по управляющим входам, формируя тем самым первый и второй интервалы управления соответственно, причем импульс с прямого выхода в первом интервале управления включает ключ 17, а во втором интервале выключает его, импульс с инверсного выхода в первом интервале управления выключает ключ 19, а во втором интервале - включает его. Выходные импульсы тактового генератора 10 поступают также на вход второго формирователя импульсов 14, иа выходе которого формируются короткие импульсы, первый из которых служит для стробирования сигнала ошибки при подаче его на управляющий вход...