B25J 17/00 — Шарниры
Шарнирный механизм манипулятора

Номер патента: 823121
Опубликовано: 23.04.1981
Авторы: Барац, Коваленко, Котенко, Селин
МПК: B25J 17/00
Метки: манипулятора, механизм, шарнирный
...кресильфоны снабжены штодинены с крестовиной Поставленная ц что шарнирный мех снабжен упругими вод поворота выпо закрепленных в ко нык симметрично о товины, прячем с камн, хоторые сое 2универсального шарнира посредством упругих элементов,На чертеже изображен шарнирный механизм, общий вид, в разрезе.. Шарнирный механизм содержит универсальный шарнир 1, состоящий нэ П- образных корпусов 2 и 3 и приводов доворота, выполненных в виде сильфонов 4, закрепленных в корпусах. В корпусах и снльфонах выполнены отверстия 5 и 6 соединаощне полости слльфонов с нсточнкком давления газа ялв жидкости (на чертеже не показан).3 82312Механизм работает. слддуйаий образом.Йля того, чтобы вызвай поворот корпусов 2 и 3, необходимо входные отверс. тия 5 и 6...
Манипулятор

Номер патента: 831615
Опубликовано: 23.05.1981
Авторы: Виноградов, Новиков, Петров
МПК: B25J 17/00
Метки: манипулятор
...19, блоки 21 и 27 колес, шестерня 24, вал 23.Изгиб шарнира, т.е. относительный поворог звеньев 1 и 2, осуществляется при одновременной работе двигателей М, и М, вращающих в разные стороны валы 32 и 33 с сидящими на их концах шестернями 30 и 31, которые с помощью зубчатых секторов 28 и 29 поворачивают водила 3 и 4 в одну сто- з 0 рону. Водила, в свою очередь, производят разворот кисти 2 относительно локтя 1,Благодаря обкатки зубчатых блоков 21, 26 и 20, 26 колес друг по другу при изгибе шарнира кинематические цепи вращения захвата и перемещения губок захвата остаются неподвижными. Вращение звеньев 1 и 2осуществляется путем вращения валов 32 и 33 в одну сторону при одновременной работе приводных двигателей Ми М. Водила 3 и 4 при...
Устройство для ориентации манипулятора

Номер патента: 831616
Опубликовано: 23.05.1981
Авторы: Бызов, Калугин, Мазуровский, Оатул, Сибрин, Черноруцкий, Школьников
МПК: B25J 17/00
Метки: манипулятора, ориентации
...на кронштейне 22, к которому прикреплен гидро- цилиндр 23, шток которого связан с направляющими 24. Рычаги 3 образуют направляющий конус 25, Грубое ориентирование устройства ориентации относительно отверстия изделия с точностью до полдиаметра отверстия осуществляется с помощью системы управления вертикальным и горизонтальным перемещениями звеньев манипулятора.Устройство для ориентации манипулятора работает следующим образом.В результате грубого ориентирования рабочие плечи рычагов 3 заходят в отверстие изделия 6, после чего устройство ориентации осуществляет точное ориентирование исполнительного органа,Гидроцилиндр 23 сообщает устройству ориентации движение по направляющим 24 в положительном направлении оси 2 в отверстие. Упоры 8...
Сустав мунипулятора

Номер патента: 837862
Опубликовано: 15.06.1981
Авторы: Бурджанадзе, Джикидзе, Хомерики, Чавчанидзе
МПК: B25J 17/00
Метки: мунипулятора, сустав
...5 стержней электромагнитов 2 расположены так, что линия разъема между полушариями (см. фиг. 2) дает возможность вхожде" ния вершин граней шестигранников в седловины между гранями шестигранников. В зазоры между гранями шести 837862гранников заделывается эпоксидная замазка.Другое звено сустава представляет собой полусферу 12 с рассредоточенными по всей ее поверхности электромагнитами 13 (постоянно включенными) ,с радиально расположенными сердечни-,5 ками 14 и катушками 15 сердечников. Также как и поверхность шара 1, поверхность полусферы 12 образована поверхностями головок 16 сердечников электромагнитов 13, имеющих шестигранную форму. Полусфера 12 по своей наружной поверхности охвачена сухарем 17 и кольцом 18, несущим в себе катушку...
Шарнир манипулятора

Номер патента: 844270
Опубликовано: 07.07.1981
Автор: Петров
МПК: B25J 17/00
Метки: манипулятора, шарнир
...конструкции шарнира.15Это достигается тем, что в шарнире, имеющем привод поступательного перемещения, например, в виде корпуса с ползуном, последний шарнирно связан с двумя звеньями шарнирно-рычажного механизма, 20 первое из которых шарнирно связано с последующим звеном, а второе шарнирно связано с этим же звеном посредством двуплечего рычага шарнирно-рычажного механизма, причем двуплечий рычаг также 25 шарнирно установлен на предыдущем звене, а оси шарниров ползуна разнесены вдоль его продольной оси.Шарнир манипулятора содержит предыдущее (ведущее) звено 1 и последующее 3 звено 2, ползун 3 привода лиеремещения, корпус которого совкорпусом звена 1. На ползуне 3с разнесением осей шарниров ползуна, закреплены звенья 4 и но-рычажного...
Сустав манипулятора

Номер патента: 844271
Опубликовано: 07.07.1981
Автор: Горбунов
МПК: B25J 17/00
Метки: манипулятора, сустав
...звена 8. Диск 18 расположен наоси 10 и одновременно,в указанной полости 12, заполненной электрореологическойжидкостью, За втулкой,11 расположенашайба 14, соединенная с электродом 15для создания электрического поля междудиском и шайбой 14. В корпусе звена 1 расположена втулка 1 б,с полостью 17, такжезаполненной электрореологической жидкостью, В стенке корпуса звена 1 ввернутапробка 18 пз изоляционного материала свмонтированнь 1 м в нее электродом 1 б.Работа сустава осуществляется следующим образом.844271 При подаче на привод сигнала управления включается двигатель 2. Момент, развиваемый двигателем, передается через редуктор 3, шестерни 7 и 9 подвижному звену 8. Звено 8 поворачивается относительно звена 1. Подключенные к источнику...
Механизм шарнира руки манипуля-topa

Номер патента: 848355
Опубликовано: 23.07.1981
Авторы: Назаров, Панасенков
МПК: B25J 17/00
Метки: манипуля-topa, механизм, руки, шарнира
...парой 12 с последующим звеном 2. Ось 10 соединена шарниром 13 с предыдущим звеном 1Точка соединения оси 10 и шарнира 13 размещена выше точки пересечения осей крестови- ны 3, соединяющей звенья 1 и 5. Механизм шарнира приводится в движение приводами (не показаны) через рычаги 14 и тяги 15.Устройство работает следующим образом. 4В исходном положении рычаги 14 зафиксированы. При повороте рычагов 14 в плоскости чертежа на равные углы против часовой стрелки промежуточное звено 5 тягами 15 поворачивается вокруг оси крестовины 3 на требуемый угол влево, одновременно рычаг 7 поворачивается вокруг оси сферического шарнира б и поворачивает через ось 8 звено 2 вокруг оси крестовины 4 в противоположную сторону. При этом оси...
Мезанизм шарнира манипулятора

Номер патента: 848356
Опубликовано: 23.07.1981
Авторы: Васильев, Назаров, Панасенков
МПК: B25J 17/00
Метки: манипулятора, мезанизм, шарнира
...рычаги 13,которые связаны сферическими шарнирами 14 с тягами 15 и с промежуточным звеном 3.Механизм работает следующим образом.5В исходном положении рычаги 13 ивал 11 зафиксированы. Поворот последующего звена 5 на максимальныйугол, например в плоскости чертежавлево, осуществляется следующим образом. Рычаги 13 поворачиваются вплоскости чертежа на равные углй.против часовой стрелки, при этом промежуточное звено 3 тягами 15 поворачивается вокруг оси крестовины 2 натребуемый угол, Одновременно рычаг 7 15поворачивается вокруг оси сферического шарнира б и псворачивает черезкарданный шарнир 12 звено 5 вокругоси крестовины 4 в той же плоскости,что и звено 3. 20Для вращения звена 5 включают привод вращения (не показан), смонтированный на...
Привод захвата манипулятора

Номер патента: 874333
Опубликовано: 23.10.1981
Авторы: Клименченко, Кудрявцев, Никаноров, Парц
МПК: B25J 17/00
Метки: захвата, манипулятора, привод
...секторами 7, закрепленными на центральных колесах 8 и 9 конического дифференциала, смонтированного на поперечной оси 5.На поперечной оси 5 жестко закреплено водило 10 конического дифференциала, на котором установлены сателлиты 11 и 12.874333 15 Формула изобретения Составитель Т. Костикова Редактор С. Родикова Техред А. Бойкас Корректор М. Коста Заказ 9143/22 Тираж 1093 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 филиал ППП Патент, г. Ужгород, ул. Проектная, 4Сателлит 11 сцеплен с центральными колесами 8 и 9, а сателлит 12 - с коническими секторами 13 и 14, скрепленными с помощью трубчатых валов 15 и 16 соответственно со звеньями 1 и 2.Привод захвата...
Шарнир манипулятора

Номер патента: 882735
Опубликовано: 23.11.1981
Автор: Полетучий
МПК: B25J 17/00
Метки: манипулятора, шарнир
...генератор 9 волн волнового15редуктора и якорь 10 электромагнитноймуфты с возможностью продольного перемещения в щипцах 11. Гибкое колесо 12 волнового редуктора, статор 13электромагнитной муфты жестко связа 20ны с фланцем 14, установленным накорпусе 3, Жесткое колесо 15 волнового редуктора связано с ведомым звер м 2 и трубой 16, опирающейся че 3 8827рез подшипниковые опоры 17 и 13 накорпус 3, С помощью гайки 19 труба 1 Ьфиксируется в осевом направлении,Статор 13 электромагнитной муфты со"держит обмотку 20 управления,Шарнир манипулятора работает следующим образом,При включении двигателя 4, черезмуфту 5 и вал б получает вращениегенератор 9 волн волнового редукто,ра. Неподвижное гибкое колесо 1 2 вол"нового редуктора, находящееся в...
Шарнир для соединения звеньев манипулятора

Номер патента: 882736
Опубликовано: 23.11.1981
Автор: Полетучий
МПК: B25J 17/00
Метки: звеньев, манипулятора, соединения, шарнир
...с зубья.ми гибкого колеса 5. С зубьями жестких колес 3 зубья гибкого колеса 5образуют подвижное зубчатое соединениеЖесткие колеса 3 связаны без относительного движения с осью 6 шарнира. 11 а оси 6 закреплен статор 7электродвигателя и установлены под"шицниковые опоры 8. Статор 7 охватывается ротором 9,помещенным внутри латунной втулки 10, на которую насажен генератор 11 волн, Через крышки12 узел ротора опирается на подыипни.ковые опоры 8. Жесткое колесо 4 совместно со звеном 2 имеет возможность 15вращаться на подшипниковых опорах 13,установленных на жестких колесах 3.В оси 6 выполнено отверстие 14, в котором проложены токопроводы 15, питающие обмотку статора 7. Осевая фиксация гибкого колеса 5 осуществляетсякольцами 16,Ыарнир...
Шарнир манипулятора полетучего

Номер патента: 885002
Опубликовано: 30.11.1981
Автор: Полетучий
МПК: B25J 17/00
Метки: манипулятора, полетучего, шарнир
...который установлен внутри гибкого колеса 7, неподвижно закрепленного на валу 8, жестко связанном со звеном 1. В валу 8 выполнено отверстие 9 в которомна подшипниковых опорах 10 установлен вал 11 ведущего зубчатого конического колеса 4. С двигателем 3вал 11 конического колеса 4 связанпри помощи торсионного валика 12,проходящего через отверстие 13, выполненное в оболочке гибкого колеса7 волнового редуктора и через отверстие вала 8, Зубчатое коническоеколесо 5, зацепляющееся с колесом 4,связано с генератором б волн, смонтированным на подшипниковых опорах14, установленных на валу 8. С зубьями гибкого колеса 7 зацепляются зубьяжесткого колеса 15, связанного созвеном 2Посредством подшипниковыхопор 16, установленных,в жестком колесе 15, и...
Устройство вертикального перемещения

Номер патента: 897499
Опубликовано: 15.01.1982
МПК: B25J 17/00
Метки: вертикального, перемещения
...на кулачковой - спиральная, например, по спирали Архимеда. Трос 6 однимконцом намотан на винтовую канавку, а другим при помощи направляющего блока 7 соединен с уравновешивающей пружиной 5. Трос 8 намотанный одним концом на спиральную канавку, взаимодействует с прижимающим блоком 9 и закреплен другим концом на блоке 10, установленном на основании 1. Прижимающий блок 9 опирается концами оси на неподвижные направляющие 11, закрепленные на основании 1, Зубчатое колесо 12 жестко связано с блоком 10 и входит в:зацепление с зубчатым колесом 13, жестко связанным с приводом.Устройство работает следующим образом.При выдвижении подвижной секции 2 жестко связанное с приводом зубчатое колесо 13 поворачивается против часовой стрелки и вызывает поворот...
Привод шарнира микроманипулятора

Номер патента: 897500
Опубликовано: 15.01.1982
Авторы: Курило, Рагульскис
МПК: B25J 17/00
Метки: микроманипулятора, привод, шарнира
...5 закреплен кольцевой пьезоэлемент 8, 4 рикционно сопряженный с двумя другими кольцевыми пьезоэлементами 9, закрепленными в корпусе 1, причем плоскость кольцевых пьезоэлементов 9 является перпендикулярной плоскости кольцевого пьезоэлемента 8 и оси 2. Электроды897500 1 О 15 аказ 11822/1 1 Подписное Ф .г кольцевых пьезоэлементов 8 и 9 разделены на части и подключены к многофазному генератору электрическихколебаний (не показано).Устройство работает следующим об 1разом,При подключении электродов кольцевого пьезоэлемента 8 к многофазному генератору электрических колебаний в нем возбуждается высокочастотная волна механических колебаний, взоне контакта с кольцевыми пьезоэле.ментами 9 создается движущая сила,. направлена в разные стороны, и...
Устройство перемещения руки робота

Номер патента: 905065
Опубликовано: 15.02.1982
Авторы: Загороднюк, Корнеев, Попков, Щепетков, Яцкевич
МПК: B25J 17/00
Метки: перемещения, робота, руки
...3 и руки 4. Торцовые части втулок 1 и 2, перемещаясь друг по другу, поворачивают ось руки 4 относительно оси основания 3 на вполне определенный угол, величина которого зависит от взаимного разворота втулок. Для предотвращения взаимного разворота руки 4 и основания 3 служит карданный вал 5. В зависимости от движения втулок 1 и 2 относительно друг друга возможны варианты работы устройства.Вариант 1 (фиг. 2). Раздельная работа втулок. Втулка 1 неподвижна, втулка 2 вра 905065щается в том или ином направлении. Траектория точек руки представляет собой окружность на поверхности сферы, проходящую через ось основания (эллипс в плоскости, перпендикулярной к оси основания). Положение окружности определяется положением скошенного торца...
Привод манипулятора

Номер патента: 905066
Опубликовано: 15.02.1982
Авторы: Жеребцов, Ковригина, Петров
МПК: B25J 17/00
Метки: манипулятора, привод
...с основным двухвенцовым сателлитом 8. Возможен вариант размещения дополнительного центрального колеса и механизма разворота в корпусе, когда дополнительный двухвенцовый сателлит взаимодействует одним своим венцом со вторым центральным колесом, а другим венцом - с дополнительным центральным колесом, а также, когда дополнительное центральное колесо с механизмом разворота установлено в рычаге, а дополнительный двухвенцовый сателлит взаимодействует одним своим венцом с дополнительным центральным колесом, а вторым - с первым и третьим центральными колесами,Привод манипулятора работает следующим образом,Перед работой привода для улучшения динамических и точностных характеристик необходимо устранить зазоры в кинематической цепи редуктора,...
Запястье манипулятора
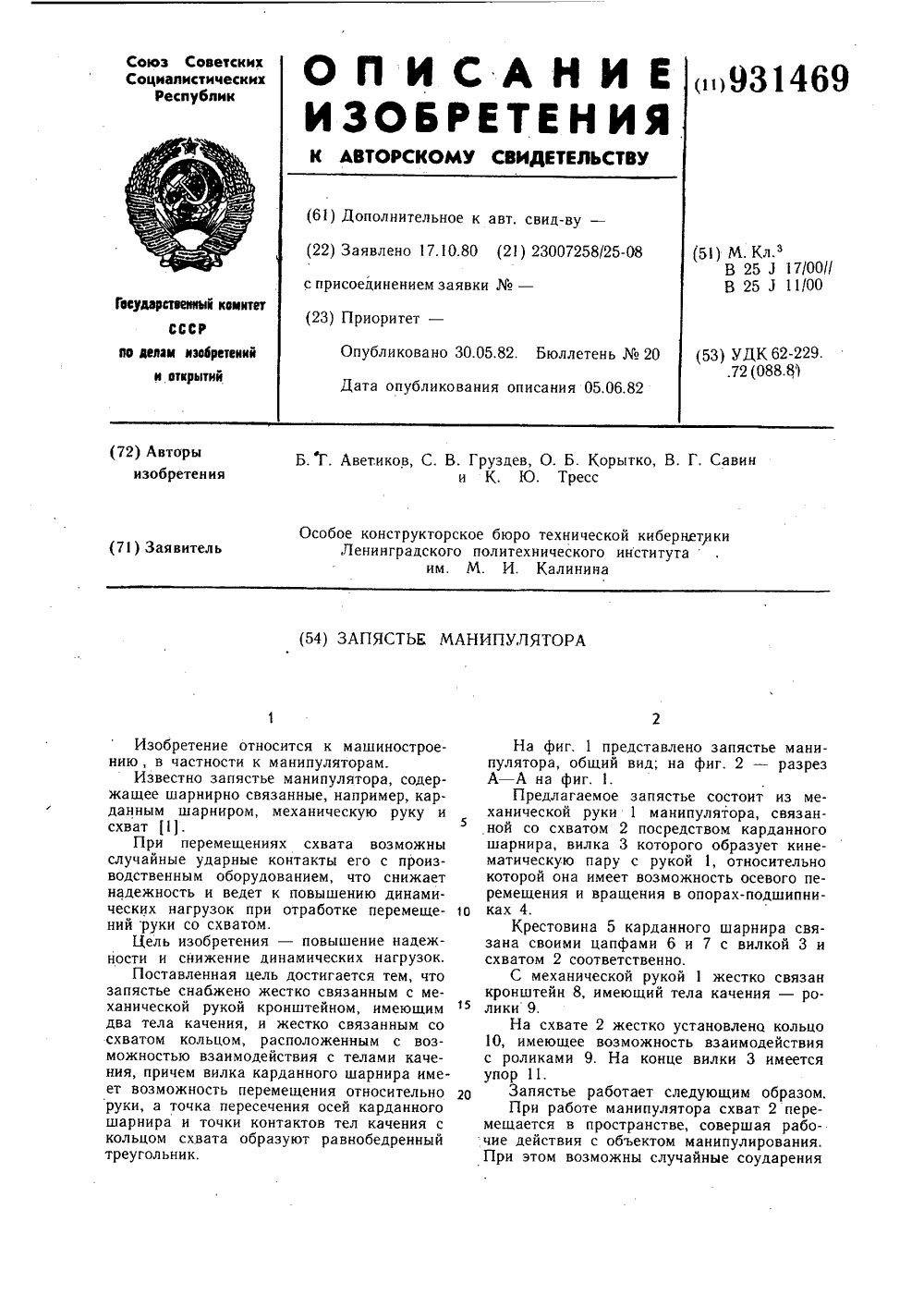
Номер патента: 931469
Опубликовано: 30.05.1982
Авторы: Аветиков, Груздев, Корытько, Савин, Тресс
МПК: B25J 17/00
Метки: запястье, манипулятора
...поверхности кольца 10 с роликами 9 и упорами 11 в подшипник 4.20Пример 2, Схват 2 испытывает боковое усилие от внешнего оборудования, которое возможно при повороте руки 1 манипулятора в горизонтальной плоскости, В этом случае кронштейн 8 вместе с крестовиной 5 поворачивается вокруг оси цапф 6, одно временно происходит отрыв поверхности кольца 10 от одного из роликов 9 и поворот схвата 2 вокруг оси цапф 7, т. е. движение по конической поверхности, вершина которой находится в точке пересечения осей цапф 6 и 7, а телесный угол при вершине определяется расстоянием между роликами 9 и их расстоянием до оси карданного шарнира. При включении обратного движения схвата 2 он под действием собственного веса возвращается в исходное...
Сустав манипулятора

Номер патента: 944922
Опубликовано: 23.07.1982
Авторы: Горбунов, Коровин, Мокрушин, Талайков
МПК: B25J 17/00
Метки: манипулятора, сустав
...прочности системы управления.Для достижения указанной цели сустав манипулятора снабжен расположенным на одном звене дифференциальныммеханизмом, водило которого кинемати чески связано с приводом, а выходные полуоси - с датчиком величины крутящего момента и со вторым звеном соответственно.На чертеже изображ н схематичносустав манипулятора.На корпусе неподвижного звена 1сусТава манипулятора размещен двигатель 2 с расположенным на его валу 3тахогенератором 4 и шестерней 5, которая находится в зацеплении с шестерней водила б дифференциала 7. Полуось 8 дифференциала 7 связана сдатчиком момента 9, а полуось 10 -с подвижным звеном 11 и датчиком по-.ложения 12.Сустав работает следующим образом.При подаче на привод сигнала управления...
Шарнир манипулятора

Номер патента: 946922
Опубликовано: 30.07.1982
Авторы: Бурджанадзе, Джикидзе, Мачавариани, Хомерики, Чавчанидзе
МПК: B25J 17/00
Метки: манипулятора, шарнир
...по наружным пияметрам шайб 5,. 6и 8 закрыты гибкой герметичной рубашкой 14 типа сильфонд, которая прополжается по всей длине секции,Шайбы 5, 6 и 8 по торцам имеют по4 концентрических отверстий 15 и по 4ттс",тцентрическтлх отверстия 16, предндэначенных соответственно цля циркуляцииотхлвжпдюшей ткипкости в полостях внутри секций ц между герметичной рубашкой14 и кожухами 10 и 11. Через отверстия16 проходят тдюхе провода (не показаны)электропигания инпукторов, Послепуюшеес 15подсоединение секций 17 и т.д. ттроизвопится посредством муфты 18.Шарнир в действие приводит изгибтермобиметалличсского стержня 2 в зави. симости от количества поданной энергии5 ОТЗЧ на индуктор. Термобиметдллическийстеттжень 2 обеспечивает переметцение(изгиб) стержней...
Шарнирный узел манипулятора

Номер патента: 952582
Опубликовано: 23.08.1982
Авторы: Бансявичюс, Рагульскис, Улозас
МПК: B25J 17/00
Метки: манипулятора, узел, шарнирный
...соответственно.Конечное звено 3 соединено с рабочим органом 12.Устройство работает следующим образом.25 При прдаче от исто, ника 10 высокочастотного напряжения блока 9 управления через коммутирующее устройство8 высокочастотного напряжения наэлектроды пьезоэлектрических шаров4 и 5 последние начинают вибрировать952582 с высокой частотой и между ними и подпятниками б и 7 создается вибрационная сжатая газоная пленка, а при работе н условиях отсутствия газовойсреды (н космосе) - нибрационнаяпленка, наличие которой практическиисключает трение между шарами 4, 5и подпятниками б и 7, т,е. трениен паре шар-подпятник практическиотсутствует и звеньям микроманипулятора можно сообщить любое рабочее Оположение. Рабочий орган 12 устанавлинают в...
Шаровая опора исполнительного органа

Номер патента: 956272
Опубликовано: 07.09.1982
Авторы: Галантер, Коган, Крейчман, Малышев
МПК: B25J 17/00
Метки: исполнительного, опора, органа, шаровая
...а между этими частями расположены дополнительно введенные кулачки, имеющие ответные скосыдля взаимодействия со скосами частейшара,На черетеже изображен держательизделия в шаровой опоре.Держатель 1 изделия 2 расположенхвостовиком 3 в полости шаровой опоры, состоящей иэ корпуса 4 (обоймы),верхней 5 и нижней 6 частей шара иоснования 7. Между частями 5 и 6 шара расположены зажимные кулачки 8.Держатель 1 опирается на пружины 9.Корпус связан с основанием 7 при помощи эластичной диафрагмы 10.Работа осуществляется следующимобразом.Держатель 1 подводится к закрепленному, например в патроне обрабатывающего станка (не показан), изделию. При подходе держателя к иэделию он базируется по опорной поверхности иэ 1 делия, поворачиваясь в частях 5 и 6...
Электромеханический сустав манипулятора

Номер патента: 975396
Опубликовано: 23.11.1982
МПК: B25J 17/00
Метки: манипулятора, сустав, электромеханический
...две зоны зацепления. Вращение электромагнитного поля вызывает врашение зон зацепленияс той же угловой скоростью оэ и приналичии разности зубьев Х -=- 2 приведет к относительному угловому перемешению гибкого колеса 8 с частотой- ьэ /3 мЬгде )= - передаточное отношение,Б 3 45Звено 3 связано с гибким колесом 8 через зубчатые зацепления , 2 и Е Х и перемешается относительно звена 5 с той же угловой частотой Я , что и гибкое колесо 8. При этом оба конца гиб, 50 кого колеса 8 деформируются одинаково и синхронно, сохраняя прямолинейность образующей, это уменьшает напряжение в теле гибкого колеса 8, не нарушается параллельность зубьев зубчатых венцов с зубьями зубчатых венцов жестких колес позволяет уменьшить, длину гибкого колеса, а значит и...
Шарнир манипулятора

Номер патента: 977154
Опубликовано: 30.11.1982
Авторы: Глазунов, Захаров, Матвеев, Павлов, Ремезов
МПК: B25J 17/00
Метки: манипулятора, шарнир
...удовлетворяют соот ношениюгде 5 л - площадь поршня поджимного ци 1 Олиндра;Я ц - площадь поршня силового цилиндра;- угол зацепления зубчатой передачи шестерня - рейка;- плечо приложения радиальной составляющей силы зацепления, действующей со стороны шестерни нарейкуотносительно оси вращениясиловых цилиндров;1 - плечо приложения радиальной составляющей силы зацепления, дей Оствующей со стороны поршней подвижных цилиндров на корпус си-,ловых цилиндров и поджимнуюскобу относительно оси вращениясиловых цилиндров, 25Шарнир манипулятора работает следующим образом.При поступлении жидкости из напорной магистрали в полость Б силовых цилиндров 5 верхний поршень 9 перемещается вправо, а нижний - влево, разворачивая вал-шестерню 3, а вместе с...
Модуль шарнира

Номер патента: 980979
Опубликовано: 15.12.1982
МПК: B25J 17/00
...9 сообщен с пневмоцилиндром 10 золотника 11, встроенного в полость вала 3 моментного цилиндра и удерживаемого в нейтральном положении пружинами 12 и 13. Полость моментного силового цилиндра разделена на части лопастями 14 и упорами 15, каждая из которых попеременно сообщается с питающей сетью 16. На щеке 4 и корпусе 1 закреплены присоедини- тельные фланцы 17 и 18. Тормозная колодка 6 устанавливается с возможностью взаимодействия с корпусом момент- ного силового цилиндра.Устройство работает следующим образом.При подаче давления в пневмоцилиндр 10 золотника 11 поршень его, перемещая золотник 11 в заданное положение для подачи давления в одну иэ полостей моментного силового цилинд980979 Формула изобретения Щ ра в зависимости от направления...
Кистевой узел манипулятора

Номер патента: 982904
Опубликовано: 23.12.1982
Авторы: Быстров, Бычков, Любимов
МПК: B25J 17/00
Метки: кистевой, манипулятора, узел
...4; герметизирующий.чехол 5.Кистевой узел 3 или 4 содержит корпус б, коакскальные валы 7-9 с установленными на них коническими роторами 10-12, взаимодействующими черезкожухи 13 с роторами 14-16, которыеуст.".новлены на кронштейне 17. Кожухи13 .крепятся на корпусе бс помощьюзамковых колец 18. Боковые поверхности роторов 10-12.и 14-16 снабжены телами качения 19-21 (например,роликами). Кожухи 13 выполнены переменного сечения с максимальной толщиной стенки между соседними роликами (фиг. 3),Ротор 10 исполнительной кистизастопорен с помощью установочныхвинтов 22 и стопорного кольца 23.Для осуществления одного из движений исполнительной кисти манипулятора роторы .10-12 взаимодействуют25 через эластичный кожух 13 с соответствующими...
Сустав манипулятора

Номер патента: 1006213
Опубликовано: 23.03.1983
Автор: Горбунов
МПК: B25J 17/00
Метки: манипулятора, сустав
...манипулятора, содержащий корпус, шарнирно сочлененные подвижное и неподвижное звенья и датчик угла поворота, снабжен установленным на неподвижном звене магнитом и источником электрического тока, причем подвижное звено установлено с воэможностью скольжения по поверхности магнита и поджато к нему, а контакты источника элек трического тока подсоединены к каж.дому звену соответственно.На чертеже изображено предлагаемое устройство.Сустав имеет звенья 1 и 2. В момент работы манипулятора при перемещении последующего звена, например звена 2, предыдущее может бытьрассмотрено как неподвижное звено,например, неподвижным является звено 1. На неподвижном звене 1 уста"новлен постоянный магнит 3. Подвижное звено 2 установлено в опоре...
Шаровая опора манипулятора

Номер патента: 1013268
Опубликовано: 23.04.1983
Авторы: Обрезков, Родионов, Соловов
МПК: B25J 17/00
Метки: манипулятора, опора, шаровая
...является то, что этаопора не имеет фиксации шара относительно полой сферы, что не обеспечивает надежность и безопасность работв защитных боксах и камерах.Целью изобретения является повышение надежности фиксации опоры.Цель достигается тем, что шароваяопора манипулятора, имеющая корпус,шар и фиксатор, снабжена вкладышем,а в полой сфере выполнен сквознойпаз, в котором размещен этот вкладыш,при этом Фиксатор расположен свозможностью взаимодействия с вкладышем.З 5На. Фиг.1-изображено устройство,Общий вид; на фиг.2 - разрез А-А нафиг.1; на фиг.3 - разрез Б-Б наФиг. 1; на фиг.4 - узелна фиг. 1ШарОвая Опора состоит из разъемного корпуса 1 с окнами 2 и 3 с те-: лесным углом 60 ф, Внутри корпуса 1 имеется гнездо, в котором установлен сферический...
Шарнир соединения звеньев манипулятора

Номер патента: 1013269
Опубликовано: 23.04.1983
Автор: Неменатов
МПК: B25J 17/00
Метки: звеньев, манипулятора, соединения, шарнир
...точности позиционирования.Укаэанная цель достигается тем, что в шарнире соединения звеньев ма нипулятора, содержащем ось, волновой редуктор, смонтированный на оси и связанный с электродвигателем зубчатой передачей, генератор волн волнового редуктора выполнен в виде кулачка,60 имеющего наружную поверхность, эквидистантную равноскоростной кривой гибкого колеса этого редуктора, и связан с ротором электродвигателя, который расположен внутри гибкого колеса. 65 На фиг.1 изображен шарнир соединения звеньев манипулятора, общий вид; на Фиг.2 - вид А на фиг.1.Шарнир соединяет звенья 1 и 2 манипулятора. На оси 3 шарнира закрепленстатор 4 обращенного электродвигателя, например синхронного гистереэисного, и генератор 5 волн деформации,...
Привод исполнительного органа манипулятора

Номер патента: 1038222
Опубликовано: 30.08.1983
Автор: Гвоздев
МПК: B25J 17/00
Метки: исполнительного, манипулятора, органа, привод
...вращения на угол, больший угла трения, и взаимодействуюцей столкателями, расположенными в направляющей, причем число толкателейне менее трех, входной блок снабженкомплектом колец по числу толкателейи дополнительным трубчатым валом,один конец которого жестко связан соснованием, а другой - с направляю-.цей этого блока, при этом каждыйтолкатель взаимодействует с индивидуальной парой колец, расположенныхв корпусе с возможностью вращенияи осевого перемещения.Кинематическая связь выполненав виде шаровой передачи,.На фиг. 1 .показан механизмшарнира манипулятора; на фиг. 2 -разрез А-А на фиг1; на фиг. 3 -разрез Б-Б на фиг, 2,Привод исполнительного органаманипулятора содержит корпус 1, вкотором размещены трубчатые входныевалы 2 и З,соединенные...
Шарнир манипулятора

Номер патента: 1047681
Опубликовано: 15.10.1983
Автор: Чепеженко
МПК: B25J 17/00
Метки: манипулятора, шарнир
...предыдущее и последующее конечные звенья,кинематические передачи к ним и дифференциальный механизм, включающий ведущеезубчатое колесо, сателлитное зубчатое колесо и водило, жестко соединенное с преды.душим звеном, сателлитное зубчатое колесо дифференциального механизма расположено таким образом, что в диаметральнойплоскости образует зубчатое соединение спредыдущим звеном по одну сторону своейпродольной оси, а с последующим звеном - 25по другую сторону.На чертеже изображен предложенныйшарнир манипулятора, общий вид.Шарнир содержит предыдущее и последующее конечные звенья 1 и 2, дифференциальный механизм, включающий ведущеезубчатое коническое колесо 3, сателлитноезубчатое коническое колесо 4, жестко соединенное с последую 1 цим...