B25J 17/00 — Шарниры
Модуль манипулятора

Номер патента: 1549744
Опубликовано: 15.03.1990
Авторы: Войнов, Кудрявцев, Солдаткин, Уваров, Уварова
МПК: B05D 1/02, B25J 17/00, B25J 9/08 ...
Метки: манипулятора, модуль
...кожухом, выполненным в виде сильфона, который предохраняет дифференциальный привод 645 от попадания рабочей жидкости, Подача рабочей жидкости(краска, лак, консервант, моющая жидкость) из резервуара (не показано) осуществляется под давлением по каналу 17 внутри вала 13 и по каналам 18 в распылительной головке 16. Образующийся факел 19 из рабочей жидкости наносится на обрабатываемую поверхность 20. На противоположном конце вала 13 жестко установлено зубчатое колесо 21 дополнитель 55 но введенной зубчато"реечной передачи 22. Продольная ось колеса 21 совпадает с продольной осью поперечной оси 1, а само колесо 21 выполняе роль статического уравновешивателя исполнительного органа 14.Модуль манипулятора работает следующим...
Исполнительный орган манипулятора

Номер патента: 1549749
Опубликовано: 15.03.1990
Авторы: Хоперия, Челидзе, Шаншиашвили
МПК: B25J 17/00
Метки: исполнительный, манипулятора, орган
...3,жестко связанная с этим звеном.Управление каждым модулем осуществляется тремя приводными .устройствами, например, гибкими тягами 4,которые связывают силовое устройство 45управления (не показано) с соответствующим цилиндрическим звеном 2. Наповерхности охватывающего сферического элемента последнего равномернозакреплены кронштейны 5 для крепления гибких тяг 4,Гибкая тяга 4, связанная с кронштейном 5, огибает направляющий ролик 6 (число которых кратно числу гибких тяг), закрепленный в полостицилиндрического звена, а в цилиндри 55ческой части каждого цилиндрическогозвена предусмотрены окна 7 под гибкиетяги. на по его оси размещена трубка 3,жестко связанная с этим звеном, наповерхности охватывающего сферического элемента которого...
Привод манипулятора

Номер патента: 1558670
Опубликовано: 23.04.1990
Авторы: Верховский, Колчин, Кудрявцев, Машуров, Уваров
МПК: B25J 17/00
Метки: манипулятора, привод
...лент 18 жестко связан с гибким колесом 12, а противоположныйконец жестко связан с валом 19 соответствующего натяжного механизма 20. На валах 19 жестко установлены храповые колеса 21, которые препятствуют самопроизвольному провороту этих валов 1 9 за счет применения подпружиненных фиксаторов 22, Эти фиксаторы 22 установлены подвижно в корпусе 9 привода 3, а усилие Фиксации регулируется винтом 23При перемещении исполнительного органа 1 к объекту манипулирования осуществляется подача энергии к двигателю 1 О. При этом начинает врашаться его выходной вал, который в свою ,очередьвызывает вращение волнообразователя 11. Вследствие этого вращения появляется бегущая волна деформации на гибком зубчатом колесе 12, Зубчатый венец 13, образуя...
L-координатный механизм

Номер патента: 1563978
Опубликовано: 15.05.1990
Авторы: Глазунов, Дайч, Колискор, Модель, Рашоян, Федосеева, Чернов
МПК: B25J 11/00, B25J 17/00
Метки: l-координатный, механизм
...на ,фиг. - расчетная схема для определения положения подвижного звена.Ь-координатный пространственный механизм содержит основание 1, подвижное звено 2, которые соединяются с помощью сферических шарниров 3 ;шестью приводами 4 линейного переме)цения с регуляторами длины 5, а также измерителями 6 расстояния между шарнирами 3 основания 1 и шарнирами 3 подвижного звена 2.Механизмы, представленные на фиг.1-6, отличаются количеством точек основания 1, в которых размещаются Шарниры 3. Количество точек на основании 1 в этих механизмах изменяется от 3 до 6. Эти механизмы реализуют свою отличную от других структуру-координат.При управлении движением Ь-коор- ф динатных пространственных механизмов необходимо решать прямую и обратную задачу о...
Беззазорный привод по меньшей мере для одной главной оси манипулятора

Номер патента: 1567129
Опубликовано: 23.05.1990
Автор: Эрнст
МПК: B25J 17/00, F16H 55/18
Метки: беззазорный, главной, манипулятора, меньшей, мере, одной, оси, привод
...стальной зубчатой ступени, Если использовать четырехступенчатую передачу, то третья ступень может быть выполнена в качестве стальной зубчатой передачи.Ведомое колесо 28 второй ступени 20 установлено в корпусе 32 через подшипник 33Соединенная с ведомым колесом 28 втулка 34 воздействует через зажимное приспособление 35 (фиг.З) на третью ступень 21, выполненную в качестве стальНой зубчатой передачи, например, с цилиндрическим зубчатым зацеплением. Для привода третьей ступени 21 предусмотрены две части 36 и 37 шестерни, которые выполнены с торсионной затяжкой друг относитель 5156/1 но друга. Они воздействуют на ведомое колесо 38, втулка 39 которого затянута через винтовое соединение 40 с втулкой 29 опоры стрелы 9. 1 ри этом колесо 38...
Приводной шарнир манипулятора
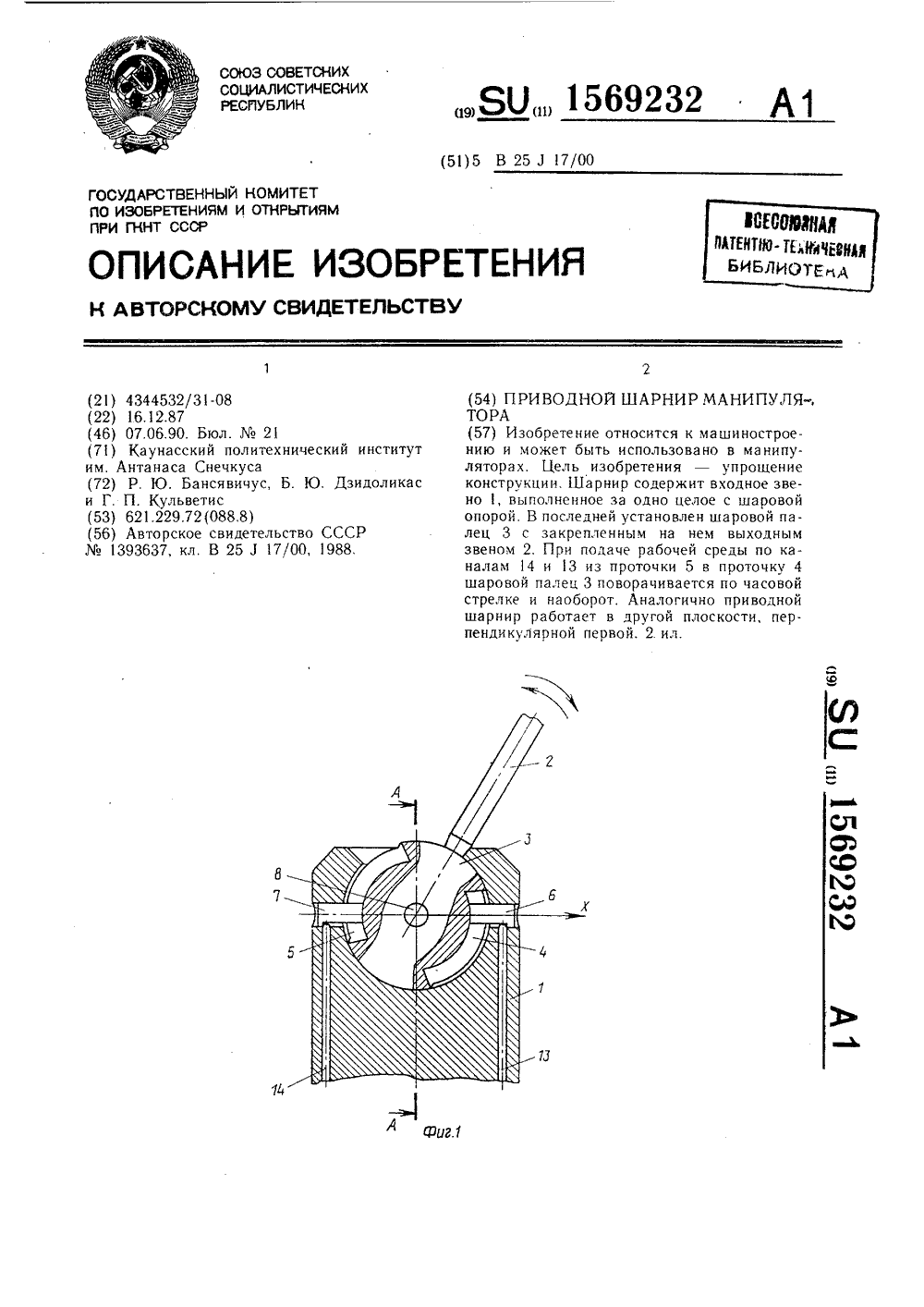
Номер патента: 1569232
Опубликовано: 07.06.1990
Авторы: Бансявичюс, Дзидоликас, Кульветис
МПК: B25J 17/00
Метки: манипулятора, приводной, шарнир
...с шаровой опорой, выходное звено 2 и шаровой палец 3. В нем образованы проточки 4 и 5, которые разделяются цилиндрическими лопатками 6 и 7, закрепленными на корпусе входного звена 1. Проточки 4 и 5 и лопатки 6 и 7 образуют герметичные полости. Цилиндрические лопатки 8 и 9 закреплены на шаровом пальце 3 и разделяют полости 10 и 11. Они выполнены в сферической поверхности входного звена 1, которое имеет сьемную верхнюю часть 12, являющуюся продолжением шаровой опоры. Каналы 13 - 16, выполненные в корпусе входного звена 1, служат для подачи рабочей среды. Приводной шарнир манипулятора работает следующим образом.Поворот шарового пальца 3 вместе с выходным звеном 2 вокруг оси У по часовой Редактор О. ЮрковецкаяЗаказ 1420ВНИИПИ...
Модуль манипулятора
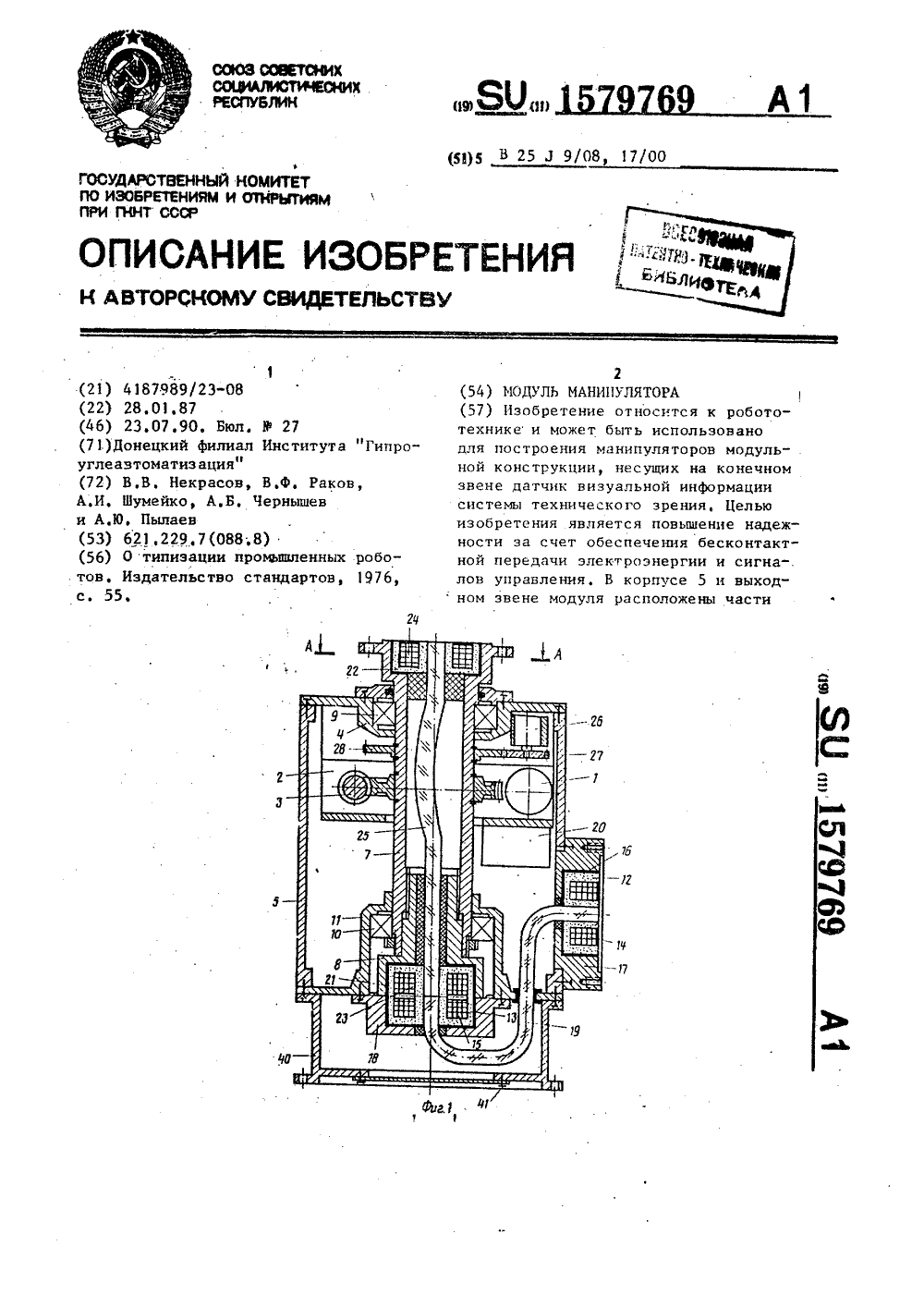
Номер патента: 1579769
Опубликовано: 23.07.1990
Авторы: Некрасов, Пылаев, Раков, Чернышев, Шумейко
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
...1крутящий момент передается через червячную передачу 3 на полый вал 7,а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения, Части стыковочных узлов соосно состыкованы торцами и вращаютсядруг относительно друга. При этомцилиндрическая форма магнитопроводов13 и 2 обеспечивает непрерывную передачу электроэнергии при взаимномвращении выходного звена 6 и корпу.са 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 по-.ступает на вход модуля и вводитсяв кабель связи через стыковочныйузел 39.Конструкция модуля обеспечивает 45возможность и обратной передачи какэлектрических, так и оптических сигналов,.поэтому каждый из внешних стыкованных узлов может быть как входом,так и...
Манипулятор

Номер патента: 1585144
Опубликовано: 15.08.1990
Авторы: Айрапетян, Арзуманян, Егишян, Парикян, Саркисян, Степанян
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...звено 5 с основанием 2. При этом оси шарниров 7 и 6 каждого передаточного механизма параллельны между со" бой. 45Манипулятор работает следующим образом.При включении приводов (на фиг.1 не показаны) происходит поворот по заданной программе входных звеньев 5 передаточных маханизмов. Вследствие кинематической связи платформы 1 с каждым из приводов посредством соответствующего передаточного механизма совоупось движений дных звеньев всех передаточных механизмов приводит к смещению в пространстве выходного звена манипулятора (платформы). В результате этого платфорПри этом сообщается перемещение тягам 3, которые связаны со звеньями4 вращательными парами 6, оси которых параллельны осям пар 7. Такимобразом, осуществляется перемещениеи ориентация...
Манипулятор

Номер патента: 1590372
Опубликовано: 07.09.1990
Автор: Полетучий
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...из них,или один независимо от остальных. Например, для поворота звена 2 относительно звена 1 на требуемый угол включаетсядвигатель 6, вследствие чего получает вра 55щение с частотой вала двигателя шкив 9,приводящий во вращение через зубчатыйремень 13 ведомый шкив 12, и связанные с ним переходник 14, вал 15, корпус 16 генератора 17 волн и сам генератор 17 волн, от которого вращение через зубчатые колеса24 и 28, валик 28. зубчатые колеса 25 и 27 передается генератору 23 волн. Вращаясь, генераторы 17 и 23 волн деформируют гибкое зубчатое колесо 18, которое, зацепляясь с жесткими колесами 21 и 22, вызывает замедленное вращение жесткого колеса 21 и связанного с ним ведомого звена 2. При этом жесткое колесо 22, связанное с валом 30 шарнира и...
Головка манипулятора

Номер патента: 1600621
Опубликовано: 15.10.1990
Автор: Эрнст
МПК: B25J 17/00
Метки: головка, манипулятора
...3 вокругоси 7 на 180 приводит к перемещению.части 3 головками на угол 2 с.Если поворачивать головку в показанном на фиг.2 положении вокруг оси4 на 180 (фиг.З), то часть 3 головкиотносительно изображенного на фиг2положения занимает положение в зеркальном отображении, Ось 7 ни в какомположении не расположена коаксиальнок оси 4, так как в каждом случаеточка 9 пересечения осей 5 и 7 находится по круговой траектории вокругоси 4, Кроме того, конструкция головки согласно фиг.1 обеспечивает и дру"гие возможности ее поворота. При повороте части 2 головки вокруг оси 5(фиг.4) получают угловое положение,соответствующее угловому положениюсогласно фиг.З, без необходимости разворота части 1, В показанном на фиг.4положении часть 3 головки можно...
Кисть промышленного робота

Номер патента: 1602741
Опубликовано: 30.10.1990
МПК: B25J 17/00
Метки: кисть, промышленного, робота
...промежуточном валу 13, а ведомое зубчатое колесо 15 смонтировано на торце корпуса 1.Промежуточный вал 13 установлен коаксиально внутреннему валу 5 посредством подшипников, внешний вал 16 также установлен коаксиально промежуточному и внутреннему 5 валам посредством подшипников 17. Корпус 1 установлен на внешнем валу 16 посредством подшипника, две дорожки 18 качения которого выполнены на передней поверхности внешнего вала 16, а его шарики 19 установлены между кольцами 20 и 21 на дорожках 18 качения. Таким образом корпус 1 через кольца 21 и 20, шарики 19 базируется на внешнем валу 16. Кисть манипулятора работает следующим образом.Вращение держателя. Вращается внутренний вал 5 с ведущим зубчатцм колесом 6; начинает вращаться блок зубчатых...
Сферический шарнир манипулятора

Номер патента: 1611734
Опубликовано: 07.12.1990
Авторы: Мозговой, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 17/00
Метки: манипулятора, сферический, шарнир
...свободно-поршневой,двигатель, пнев 50матический вибратор, Фиксирующий стержень 17 годпружинен и может перемещаться в пазу 18 под действием электромагнитного поля обмотки 19, связанной со своим источником питания.55Шарнир работает следующим образом, Стержень 17 под действием поданного на обмотку 9 постоянного напряжения отходит от части 2 шарнира,происходит расфиксацкя частей 1 к 2,Диск 9 поворачивается под действиемэлектромагнитных полей катушек 13 намагниты 12 до требуемого положения сшагом, равным угловому расстоянию,.между осями соседних катушек 13. Приэтом импульсы напряжения, поочередно подаваемые на катушки 13, расположенные вблизи от магнитов 12, на шаг перемещают диск 9 в нужном направлении. Требуемое положение диска 9 и...
Шарнир манипулятора

Номер патента: 1620301
Опубликовано: 15.01.1991
Авторы: Давыскиб, Косов, Кудрявцев, Уваров
МПК: B25J 17/00
Метки: манипулятора, шарнир
...волн 8,Шарнир манипулятора работает следующим образом.При наладке шарнира вращением эксцентриков 13 разворачивают торцовые колеса 11 в разные стороны и тем самым устраняют зазоры в кинематической цепи шарнира,Перед началом работы шарнира включается генератор 16 частоты колебаний, задающий определенную частоту колебаний упругой спирали 18. При этом щуп 19 частотомера снимает колебания со свободного конца спирали 18, расположенного между ползуном 20 и самим щупом 19, В зависимости от положения ползуна 20 изменяется длина этого свободного конца спирали 18 и соответственно изменяется частота его колебаний. В начальный момент времени или после остановки запоминается частота колебаний спирали 18, снятая щупом 19, и тем самым...
Шарнир манипулятора

Номер патента: 1630879
Опубликовано: 28.02.1991
Авторы: Дубинин, Дюкель, Лукенюк, Молотов, Рамзаев, Чумак
МПК: B25J 17/00
Метки: манипулятора, шарнир
...Заказ 514 Тираж 458 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР13035, Москва, Ж - 35, Раушская наб., д. 4/5 Производственно. издательский комбинат Патентъ, г. Ужгород, ул. Гагарина, 1 ОзИзобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов,Цель изобретения - упрощение конструкции управляемого сферического шарнира,На чертеже изображен шарнир манипулятора, общий вид.Шарнир манипулятора содержит пару сферических звеньев 1, и 2, причем звено 1 состоит из двух полусфер, скрепленных винтами 3, а звено 2 имеет отверстия 4, Звенья 1 и 2 выполнены из магнитопроводящего материала, На звене 1 закреплены бесконтактные опоры 5, например виброопоры. На...
Кисть манипулятора

Номер патента: 1632780
Опубликовано: 07.03.1991
МПК: B25J 15/00, B25J 17/00
Метки: кисть, манипулятора
...На цилиндрической поверхности муфты выполнен кольцевой паз 11, на сферической - пересекающийся с ним паз 12 в виде полукольца, причем паз 12 выполнен в плоскости поворота схватов при вращении головки. Хвостовики 6 схватов размещены в пазах 11 и 12.Кисть манипулятора работает следующим образом.В исходном положении (фиг, 1) при вращении вала 7 начинает вращаться муфта 8. При этом хвостовик 6 схвата 4 скользит по пазу 1 1, и схват 4 остается неподвижным, а схват 5, хвостовик которого размещен в пазу 12, поворачивается на необходимый угол вокруг собственной оси. При смене положения схватов включается привод поворота головки 1, шестерня 2 поворачивает сектор 3, головка поворачивается, при этом хвостовики 6 схватов 4 и 5 перемещаются по...
Устройство для электродуговой сварки

Номер патента: 1646758
Опубликовано: 07.05.1991
Авторы: Ермаков, Кичигин, Чернышев
МПК: B23K 37/02, B25J 17/00
Метки: сварки, электродуговой
...при этом люфты и зазоры во всей кинематической цепи. Винтовой хвостовик 14 тяги 3 при этом контактирует со стержнем 22 датчика 21 положения рабочего инструмента - горелки 8. Сигнал датчика 21 при крайнем положении горелки 8 поступает на электродвигатель 20 и реверсирует его. Устройство представляет собой определенный модуль промышленного робота и устанавливается на его руке, позволяет совершать различные точные колебательные движения горелки 8 при прямолинейном перемещении руки робота, исключая тем самым колебательные движения руки. Устройство также может быть установлено на сварочном тракторе, 7 ил. Ю(в 15 В 23 К 37/О ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР г ПИСАНИЕ ИЗОБРЕ И АВТОРСКОМУ СВИДЕТЕЛЬСТВ 21)...
Приводной сферический шарнир

Номер патента: 1646863
Опубликовано: 07.05.1991
Автор: Полетучий
МПК: B25J 17/00
Метки: приводной, сферический, шарнир
...с ним шаровая головка 3, Таким образом, при работе привода 22 шаровая головка 3, связанная с ведомыми звеньями 2 и 39, получает вращение вокруг оси, Однако такое вращение возможно только при совпадении оси вала 10 с продольной осью ведущего звена 1, т.е. с осью валов 19 и 21, Это вращение является вспомогательным и предназначено для поворота шаровой головки 3 в требуемой плоскости относительно осиХиЕ.Для сообщения поворотного движения шаровой головки 3 в плоскости зубчатого сектора 11, т,е, относительно оси Х и Е, включаетсяприводной двигатель 24, который через валы 25, 27 и муфту 26 приводит во вращение генератор 15 волн. Вращаясь, генератор 15 деформирует гибкое колесо 14, зацепляющееся с жестким колесом 13, вследствие чего последнее...
Шарнир манипулятора

Номер патента: 1646864
Опубликовано: 07.05.1991
Авторы: Алферов, Полетучий, Шебанов
МПК: B25J 17/00
Метки: манипулятора, шарнир
...гибкого зубчатого колеса 11 и его зацепления с жестким колесом 10 гибкое колесо 11 получает медленное вращение и сообщает его оси 3 и связанному с ней ведомому звену 2. При этом получает вращение и статор 4, но так как волновой редуктор обладает большим передаточным отношением. то вращение статора 4 весьма медленно по сравнению с вращением полого цилиндрического ротора 5 и нормальная работа двигателя обеспечена.Величина передаваемого вращающего момента регулируется силой прижатия фрикционных колец 16 и 17, 20 и 21 к шарикам 18, которая зависит от жесткости упругих элементов 19.Для регулирования скорости ведомого звена 2 подается напряжение на управляющий шаговый двигатель 28, вследствие чего получает вращение червяк 13 и червячное колесо...
Модуль промышленного робота

Номер патента: 1657371
Опубликовано: 23.06.1991
Авторы: Алексеев, Березников, Карпов, Ращинский, Федорин
МПК: B25J 17/00, B25J 19/06, B25J 9/08 ...
Метки: модуль, промышленного, робота
...через муфту 5. Основная полость 6, образованная внутри полого корпуса 1 и выходного звена 2, соединена каналом 7 и трубопроводом 8 с источником воздуха; не содержащего паров агрессивных сред, или с устройством генерации воздуха, не содержащего паров агрессивных сред. В полом корпусе 1 выполнены расточки, образующие дополнительные полости 9. Причем дополнительные полости 9 связаны посредством каналов 10 между собой и через трубопровод 11 с источником вакуума или с устройством генерации отрицательного давления (не показан) и изолированы от основной полости 6 и внешней среды спаренными уплотнениями 12 и 13. Основная полость 6 отделяется от внешней среды в местах подвижного соединения полого корпуса 1 и выходного звена 2 спаренными...
Механизм привода промышленного робота

Номер патента: 1660959
Опубликовано: 07.07.1991
Авторы: Пархоменко, Трищ, Удалов
МПК: B25J 11/00, B25J 17/00
Метки: механизм, привода, промышленного, робота
...соответствует симметричному расположению торцов сердечника 15, относительно поперечной плоскости симметрии катушки. Перемещение сердечника приводит к осевому перемещению ступицы 13, полумуфт 11 и 12 и защемленного между ними внутреннего края упругой мембраны 10. Поскольку лепестки мембраны 10 установлены посредством кернов 9 в подпятниках 8 с предварительным односторонним прогибом, то такая система образует хлопающую мембрану с жестким центром.Перемещение места защемления мембраны совместно с полумуфтами 11 и 12 приводит к переходу системы из одного из крайних устойчивых состояний к промежуточному неустойчивому(среднее положение). Дальнейшее перемещение происходит независимо под действием сил упругости упругого элемента к второму...
Шарнир манипулятора

Номер патента: 1669714
Опубликовано: 15.08.1991
Авторы: Альсенов, Кравченко, Лившиц, Попенко, Шишлянникова
МПК: B25J 17/00
Метки: манипулятора, шарнир
...стяжкой 6 с гайками 7,Регулирование зазора (д) осуществляется путем перемещения полуосей 3 в осевом направлении, Для уменьшения зазора икомпенсации износа поверхностей скольжения полуоси сближаются, для чего гайки7 навинчиваются на стяжку, а установочные 4элементы 10 вывинчиваются из резьбовыхотверстии 9, Для увеличения аааора полу- );оси раздвигаются путем свинчивания гаек 7со стяжки 6 и ввинчиванием установочныхэлементов 10,Зная шаг резьбы на установочных элементах и стяжке, можно с достаточной точностью установить величину зазора ( д )путем вращения указанных элементов, допустим на 0,25; 0,5; 0,75; 1 оборот, Зазорустанавливается из расчета минимальногоосевого смещения звеньев и свободного их поворота относительно друг...
Шарнир манипулятора

Номер патента: 1673437
Опубликовано: 30.08.1991
МПК: B25J 17/00
Метки: манипулятора, шарнир
...одной части шарнираотносительно другой, т,е. постоянного магнита 6 относительно сферы 1, на обмоткузаданного электромагнита подается питающее напряжение,Вокруг сердечника 3 этого электромагнита возникает магнитное поле, которое взаимодействует с магнитным полемпостоянного магнита 6. За счет притяженияразноименных полюсов включенного электромагнита и постоянного магнита 6 последний,вращаясь вместе с дугой 8 по меридианамсферы и с дугами 8 и 7 по параллелям сферы,изменяет свое положение в пространстве ипритягивается к сердечнику 3 включенногоэлектромагнита. Для более эффективного перемещения постоянного магнита 6 в обмотку2 электромагнита, соответствующего исход ной позиции шарнира, нужно подать питвющее напряжение, которое создает...
Приводной шарнир манипулятора

Номер патента: 1675079
Опубликовано: 07.09.1991
Авторы: Войнов, Давыскиб, Кудрявцев, Уваров, Феофанов
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, приводной, шарнир
...значение, магнитное поле в зубчатом зацеплении колеса 12 и роликов 18 и в кинематической паре ролики 18 - генератор 6 волн выступает в роли "воздушной прослойки", обеспечивающей устранение трения качения. На корпусе 1 может быть установлена плита 25, по которой элементы шарнира базируются на других элементах в конструкции манипулятора, а на выходном валу 15 шарнира может быть установлен ведущий шкив 26 с ремнем 27 ременной 5 10 15 20 25 30 35 40 45 50 55 передачи для передачи движений другим элементам конструкции манипулятора.Шарнир работает следующим образом,От системы управления (не показана) подается сигнал на включение электродвигателя 2. При этом начинает вращаться выходной вал, а его зубчатый венец передает вращение через...
Шарнир манипулятора

Номер патента: 1678607
Опубликовано: 23.09.1991
Авторы: Гуревич, Кожевников, Уваров
МПК: B25J 17/00
Метки: манипулятора, шарнир
...11 гибкого колеса б при изготовлении нарезаны на поверхности начального конуса с углом а при вершине и имеют эвольвентный профиль.Аналогично, зубчатые венцы 10, 12 соответственно жестких колес 8 и 7 выполнены эвольвентно-коническими, Выходной вал 9 установлен на опорах 21 качения в стакане 22, который в свою очередь жестко связан с ведущим звеном 1 через компенсационное кольцо 23.Жесткое колесо 8 кинематически связано с ведущим звеном 1 посредством дополнительно введенных и расположенных диаметрально друг относительно друга соответственно регулировочных винтов 24 истопорных винтов 25,Шарнир манипулятора работает следующим образом.После сборки шарнира или в период регламентного обслуживания наладчик регулирует величину прижатия...
Шарнир манипулятора

Номер патента: 1703455
Опубликовано: 07.01.1992
МПК: B25J 17/00
Метки: манипулятора, шарнир
...ведомому звену 19, 3 ил. соответственно и соединены с ними посредством шарниров 12 и 13, Пружинные трубки 10 и 11 связаны с ведущим звеном 1 с помощью переходников 14 и 15. Вал 4 соединен с жестким колесом 16 волновой передачи, с которым зацепляется гибкое колесо 17, выполненное в виде трубы и имеющее внутренние зубья. Снаружи гибкое колесо 17 охватывается генератором 18 волн, неподвижно соединенным с ведомым звеном 19 шарнира. Гибкое колесо 17 неподвижно соединено с ведущим звеном 1 шарнира.Шарнир работает следующим образом, Рабочая среда под высоким давлением подается в одну иэ пружинных трубок. например 10. При этом конец трубки 10, связанный шарниром 12 с наружной обоймой 8 обгонной муфты, совершает поворот в направлении...
Хобот манипулятора

Номер патента: 1710333
Опубликовано: 07.02.1992
Автор: Борисенко
МПК: B25J 1/02, B25J 17/00
Метки: манипулятора, хобот
...10, Последний снабжен двумя цапфами 11, пропущенными через продольные отверстия, выполненные в наружных элементах 8, Цапфы 11 присоединены к последующему звену 12. Плоскость расположения осей продольных отверстий в общем случае наклонена к продольной оси начального звена 3. Аналогичным образом соединены и последующие звенья хобота, Внутренние и наружные элементы снабжены стержнями 13 и 14, кинематически связанными между собой дополнительным сферическим шарниром 15,Хобот манипулятора работает следующим образом,При включении привода 4 осуществляется поворот в подшипниках 7 ведущего стержня 5, который посредством сферического шарнира 15 преобразуется в поворот стержня 13 и связанного с ним последующего звена 12, Далее этот поворот по...
Узел сочленения манипулятора простопопова

Номер патента: 1713799
Опубликовано: 23.02.1992
Автор: Простопопов
МПК: B25J 17/00
Метки: манипулятора, простопопова, сочленения, узел
...связана с корпусомвилки 2, а зубчатая рейка 14 - с корпусомвилки 1. На валу 9 расположена с возможностью вращения вокруг него серьга 15, 45имеющая направляющую 16, служащую дляперемещения зубчатой рейки 13 относительно серьги 15, На валу 10 в свою очередьнаходится аналогичная серьга 17, имеющаянаправляющую 18. Рейка 14 может перемещаться относительно серьги 17. Цилиндрические зубчатые колеса 11 и 12, зубчатыерейки 13 и 14, также серьга 15 и 17 с направляющими 16 и 18 образуют кинематическийшарнир. 55Узел сочленения манипулятора работает следующим образом.При вращении приводных валов 3 и 4(фиг,2) по часовой стрелке (если смотреть с конца валов 3 и 4) вилка 1 совершает линейные перемещения относительно вилки 2. Крутящие моменты от...
Приводной шарнир манипулятора

Номер патента: 1715580
Опубликовано: 28.02.1992
Авторы: Бансявичюс, Дзидоликас, Кульветис
МПК: B25J 17/00
Метки: манипулятора, приводной, шарнир
...опорой, выходное звено 2, шаровой палец 3. В шаровом пальце 3 имеются проточки 4 и 5, которые разделяются сухариками 6 и 7, надетыми на 15 . цилиндрические лопатки 8 и 9, Цилиндрические лопатки,8 и 9 установлены неподвижно в корпусе входного звена 1. Сухарики 10 и 11, разделяющие проточки 12 и 13, надеты на цилиндрические лопатки 14 и 15. Проточ ки 12 и 13 выполнены в сферической поверхности входного звена 1, Последнее имеет съемную часть 16, Каналы 17 - 20, выполненные в корпусе входного звена 1. служат для подачи рабочей среды. М " А 25 Приводной шарнир манипулятора работает следующим образом.Поровот шарового пальца 3 вместе с выходным звеном 2 вокруг оси У по направлению часовой стрелки происходит с помощью перекачки рабочей среды из...
Беззазорный привод подвижного звена

Номер патента: 1715581
Опубликовано: 28.02.1992
Автор: Борисенко
МПК: B25J 17/00
Метки: беззазорный, звена, подвижного, привод
...чем прототип, может применяться для получения полноповоротного вращательного движения, в.та время как конструкция прототипа этого не позволяет (поворот ведомого звена ограничен конструкциеи корпуса) На фиг, 1 представлена схема предлагаемого привода для случая применения цилиндрических зубчатых колес; на фиг. 2 - Вариант схемы с коническими колесами; на фиг, 3 - устройство фиксирования и поворота диска, вид спереди; на фиг. 4 - разрез А-А на фиг. 3.Беззазорный привод включает двигатель 1, многоступенчатый зубчатый редуктор 2, выходной вал 3, связанный с подвижным звеном 4 На выходном валу 3 установлено зубчатое колесо из двух половин. Одна половина 5 жестко посажена на выходном валу, а другая половина 6 установлена на нем с...
Исполнительный орган манипулятора

Номер патента: 1722813
Опубликовано: 30.03.1992
Авторы: Косов, Кудрявцев, Митрофанов, Уваров, Феофанов
МПК: B25J 17/00, B25J 19/00, B25J 9/00 ...
Метки: исполнительный, манипулятора, орган
...зависимости от количества проводников электроэнергии,Исполнительный орган работает следующим образом.Механическая рука 1 манипулятора по команде системы управления (не показана) позиционируется в области осуществления сборочной операции (например, сборка резьбового соединения). От системы управления подается сигнал на подвод энергопитания к электроприводу 9 качания головки 4. Крутящий момент передается посредством первой ременной передачи на головку 4 качания захватного устройства 2. При вращении ведомого вала первой ременной передачи вращается эксцентрик 32 с постоянным магнитом 34 и стальными губками 35 датчика 10 обратной связи. ДатчикХолла 40 при этом неподвижен и находится в магнитном поле, создаваемом постоянным магнитом 34 через...