Патенты с меткой «промышленного»
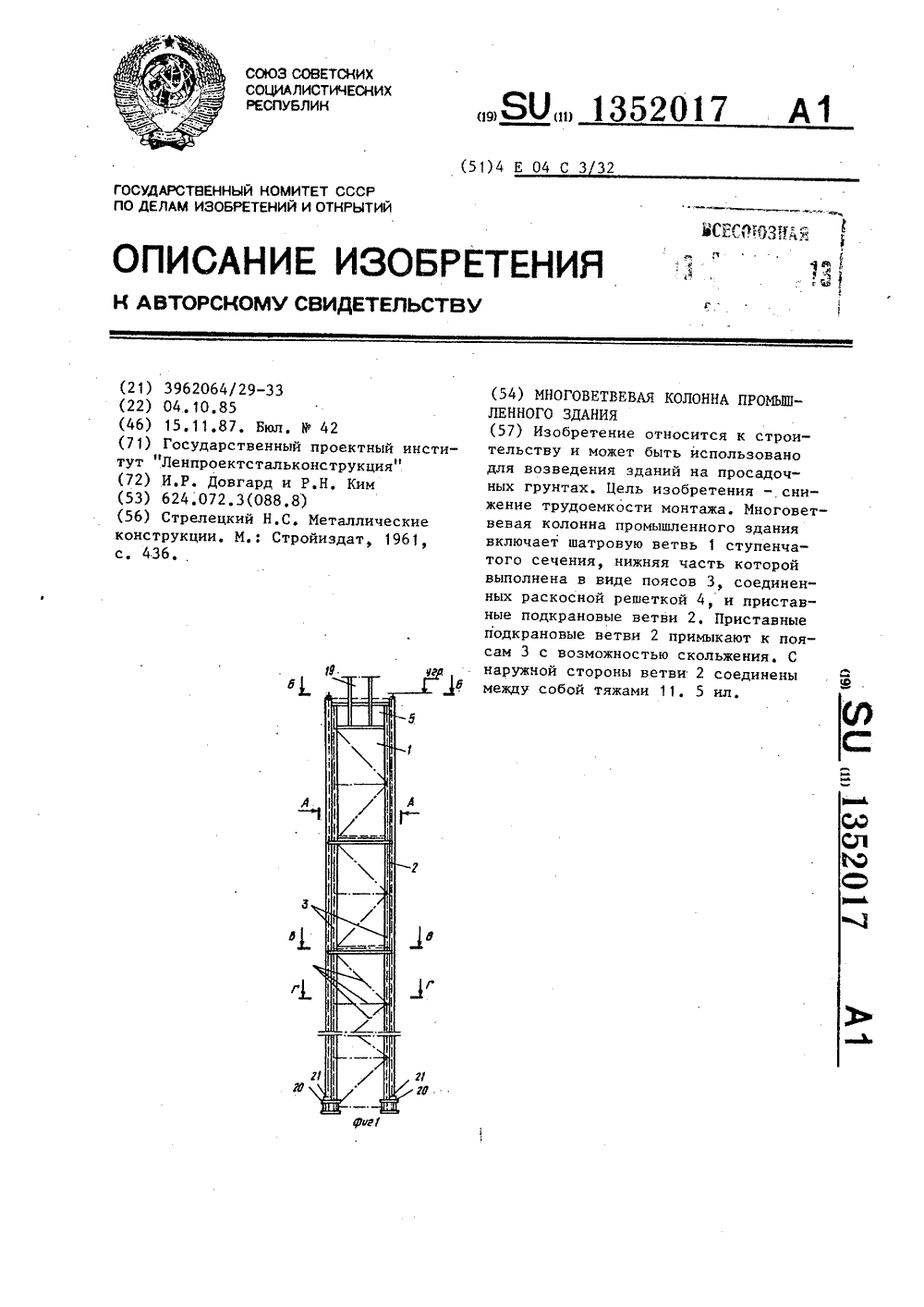
Многоветвевая колонна промышленного здания
Номер патента: 1352017
Опубликовано: 15.11.1987
МПК: E04C 3/32
Метки: здания, колонна, многоветвевая, промышленного
...весь габарит колонны, такчто колонна имеет предельно возмож 55ную жесткость в плоскости поперечника здания, При этом траверса 5, поддерживающая шейку колонны, такжеподнята на предельную высоту - уровень верхней полки подкранового пути, что также увеличивает жесткость, колонны. Упоры для домкратов располагаются на полках 7 приставных стоек 2РаСсмотрим работу приставных ветвей в плоскости наибольшей жесткости многоветвевой колонны под нагрузкой в отрихтованном состоянии, считая, что в предельном положении точки, связанные тяжами 11, могут находиться посередине панели между узлами раскосной решетки шатровой ветви 1. Приставная ветвь 2 имеет иэгибную жесткость в плоскости поперечника, значительно большую, чем жесткость поясов...
Схват промышленного робота

Номер патента: 1355482
Опубликовано: 30.11.1987
Авторы: Ивашов, Некрасов, Петров, Трояновский
МПК: B25J 15/00
Метки: промышленного, робота, схват
...регулируется, например, с помощью винтовых механизмов,13554 Формула изобретения Схват промышленного робота, содержащий расположенные на корпусе приводные губки, выполненные в виде изогнутых пластин, имеющих выпукло-вогнутую форму, концы которых шарнирно связаны с корпусом, а середина жестко соединена с рычагом, кинематически связанным с приводом, о т л и - ч а ю щ и й с я тем, что, с целью расширения технологических возможностей, середина пластины шарнирно связана с корпусом и имеет возможность регулировочного поперечного перемещения, кинематическая связь рычага с приводом осуществлена посредством кулисы, а пластины выполнены в виде манометрических трубок с возможностью подачи в их внутреннюю полость рабочей среды под давлением....
Устройство для усиления одноэтажного промышленного здания

Номер патента: 1357526
Опубликовано: 07.12.1987
Авторы: Герзон, Иванов, Коваль, Малиновский, Нажа, Салацинский
МПК: E04G 23/00
Метки: здания, одноэтажного, промышленного, усиления
...для усиления одноэтажного промышленного здания содержит каркас в виде поперечных рам, составленных из ме таллических колонн 1 и опирающегося на них покрытия 2, продольные связи 3 и 4 между металлическими колоннами 1, подкрановые балки 5, закрепленные на металлических колоннах 1, и жесткие парные элементы 6 и 7 связей, соединяющие ниже закрепления подкрановых балок 5 металлицеские колонны 1 и основание 8. Парные элементы 6 и 7 связей расположены с одной стороны каркаса под углом к основанию 8 и симметрично плоскости поперечной рамы. Парные элементы 6 и 7 связей соединены с металлическими колоннами листовыми диафрагмами 9. 1(аждая горизонтал:- ная ось, расположенная в плоскости обеих листовых диафрагм 9 и проходящая через центр...
Способ регулирования расхода тепла в системе теплоснабжения промышленного здания

Номер патента: 1362897
Опубликовано: 30.12.1987
Авторы: Москвина, Пескин, Ратнер, Эпштейн
МПК: F24D 19/10
Метки: здания, промышленного, расхода, системе, тепла, теплоснабжения
...выключателя 27 при минимально допустимом количестве теплоносителя в местную систему теплоснабжения (фиг. 1), замыкается контакт 28 конечного вылючателя, включается пускатель 20, при этом контакт 19 пускателя 20 размыкается, а контакт 2135 40 45 50 55 замыкается, перенося воздействие регулятора 17 по линии Больше с ЭИМ 11 на ЭИМ 15, а силовые контакты 26 пускателя 20 замыкаются, включая электродвигатель 25 смесительного насоса 13.Если при этом внутри здания 6 температура продолжает оставаться выше заданной, регулятор 17 по линии Больше воздействует на ЭИМ 15, открывая клапан 14, увеличивая количество обратной воды, подмешиваемой из трубопровода 8 в трубопровод 1, снижая тем самым температуру на входе в местную систему...
Схват промышленного робота

Номер патента: 1364472
Опубликовано: 07.01.1988
Авторы: Гевко, Какойченко, Сулимов
МПК: B25J 15/00
Метки: промышленного, робота, схват
...на пальцах 10, имеющих, например, квадратное поперечное сечение. Губки 9 зафиксированы в рабочем положении подпружиненными фиксирующими элементами, выполненными в виде дисков 11, установленных на пальцах 10 с возможностью осевого перемещения и взаимодействующих с лунками 12 посредством сферических тел 13. Диски 11 поджаты пружинами 14, величина сжатия которых регулируется гайками 15. Пальцы 10 имеют головки 16 под ключ. Во избежание трения между головками 16 и торцовыми поверхностями рычагов 3 установлены опорные шарики 17. Боковая поверхность губок 9 выполнена в виде совокупности различных по форме рабочих профилей, например поперечной призмы 18, продольной призмы 19, лунки 20, плоскости 21, предназначенных для взаимодействия с...
Схват промышленного робота

Номер патента: 1364473
Опубликовано: 07.01.1988
Автор: Смирнов
МПК: B25J 15/00, B25J 15/02
Метки: промышленного, робота, схват
...9, закрепленный на рейке-втулке 5, На рейке- втулке 5 и дополнительной втулке 7 закреплены губки 10 и 11. Корпус схвата с помощью оси 12, проходящей через центр зубчатого колеса 2, соединен с корпусом силового цилиндра 13, Между корпусом схва та и корпусом силового цилиндра 13 установлены регулировочный элемент 14 и пружина 15 сжатия. Корпус силового цилиндра 13 соединен с рейкой-втулкой 5 шарнирами 16 и 7.Схват работает следующим образом.В исходном положении шток силового цилиндра 13 находится в крайнем левом положении. Изделие расположено между раскрытыми губками, причем губка 10 находится в вертикальном, а губка 1 - в горизонтальном положении. После подачи рабочего давления шток силового цилиндра перемещает рейку-втулку 5 вправо, а...
Пневмопривод промышленного робота

Номер патента: 1364781
Опубликовано: 07.01.1988
Авторы: Артемов, Крючков, Скородумов, Соболев, Суетина
МПК: F15B 15/14
Метки: пневмопривод, промышленного, робота
...55При перемещении штока 3 из одного крайнего положения в другое, например слева направо, все связанные с ним элементы движутся поступательно. После того как наклонная поверхность 22 одного из кулачков 21 коснется якоря 24 электромагнита 14 оба кулачка 21 вместе с шестернями 17 поворачиваются вокруг оси 18, растягивая пружины 19. Находящиеся в зацеплении с шестернями 17 шестерни 16, при этом поворачивают связанные с ними через ступицы 12, втулки 11 и шток 3. В заключительный период хода штока 3 якорь 24 левого электромагнита 14 взаимодействует с наклонной поверхностью 23 кулачка 21. Схват 8, шарнирно связанный со штоком 3 и жестко через кронштейн 7 с траверсой 6, при этом перемещается только поступательно. При подходе магнита 26 к...
Тактильный сенсор промышленного робота

Номер патента: 1371902
Опубликовано: 07.02.1988
Автор: Шварцман
МПК: B25J 15/00, B25J 19/02
Метки: промышленного, робота, сенсор, тактильный
...нрцвцлникцв, ццдклксл)ых к измерительнцлх устрс)йству систлы уцравления роботцл или к уцрдвлякнцеи ЭВЧ.1 ктильный снсцр рд(от;ит сле,р,кнцим цбрдзцч.11 ри црилс)женин лсцлия лжлл,1)тци. кчи 1 9 цернцликхлярцо )цверхцкти сн(цр;), например Р л ццлцсти 14, ццо цсрс Лается жидк(ктид)ц.)цякн)сей )нлость 14, которая чгнцвс 1)ц црелдет лдвление на л;цики 4, 5, 7 и 8 цс рсз стн(ли 2 О и 21 1 ри эцм соотвсс ) вс книнес и,)ия цри.с )с(ктся к се) л(сцтдч 26, ири,с)дк(цич к стс илч 2 и 21 и ич;)ндлцгццныч (.И) ндлы этих СС)Мц ГСВ, цр(НН)рцнцис)ЛЬНЫЕ ЛСИЛИК Р нн(ццдют чесгц црилцжения и интцсинвсгь цри.иженццп лсилия Р). 1.сли к ццврхцсс)и сшкцр бу.сс) ирилжев лси.)ис 1)ц.1 л глоч л нцв рхццс) и, )ц такк лсилис рслл(1,(ындлся и;1 Л)с...
Схват промышленного робота

Номер патента: 1371903
Опубликовано: 07.02.1988
МПК: B25J 15/00
Метки: промышленного, робота, схват
...фОРЧОВД- ция):1 у бст(й СЕКтОр КжЛОГО ЭЛЕЧ ц ГЗ 5 и(;имолйствут с рйкой 7 штока 8. ичсю(ис(о лвукстороццкк зубчатую Нарезку и сяззццого с пор(пцч пцс Вч;(тическоп) Врио.ш(. л В;(т иром ы шлеи цо(о робота работа слс Лу к(цич образом.11 ри 1 о,шс(с лдв,(еш 1 я цравую часть иришлд 2 игок 8 псремНлктся Влево и цри цочоц(и,(ву.лстроццей рейли 7, Воз,(сйствуязубч;(тыскгоры, цоворачивает Вокруг к и 3 элл(с цты 5 (длдтцык рычс(пВ, В р(уЛЬтс Г ЧС ГО Гу 6 КИ 6 ОЛВтЬ(вд Кт ( - (з,(ь ) 11 ри црололжс ции лви,+;ения штока 8 сс кторы элчсцтов 5 цоир;чивдкгся ца ,оцо.Иигг(ц(й угол (цо Вличице рд(личный в 1;(цисичосги о( развивмого усилия В црицолс 2 и суччдршй,+сгкости элчец ОВ), и ГО ЖС Вр)1 я (сс 6)КИ, Л ЖС КОСИЛ ВцИ5( 2летали 9, остдк)тся...
Вентиляционное устройство для удаления вредных выделений от промышленного оборудования

Номер патента: 1373999
Опубликовано: 15.02.1988
Автор: Вайнберг
МПК: B08B 15/02, F24F 13/08, F24F 7/06 ...
Метки: вентиляционное, вредных, выделений, оборудования, промышленного, удаления
...выделений от промышленного оборудования содержит зонт1, расположенные в нем поворотныетрапецеидальные пластины 2 и соединенный с последними привод 3, причем ось 4 поворота каждой пластины2 размещена у ее нижнего основания,а привод 3 соединен с верхними частями пластины 2,Ось 4 пластины 2 опирается наопорные балки 5, расположенные внутри зонта 1, а привод 3 через рычагЬ соединен со штоком 7, который всвою очередь через планки 8 подсоединен к верхней части пластины 2,Шток 7.перемещается по направляющим втулки 9. Для нормальной работыустройства число пластин должнобыть не менее трех,Устройство работает следующим образом,ВНИИПИ Заказ 558 34 При срабатывании привода 3 рычаг6 перемещает шток 7 в верхнееили нижнее положение, при этомпланки 8,...
Каркас одноэтажного промышленного здания

Номер патента: 1375774
Опубликовано: 23.02.1988
Авторы: Новицкий, Островский
МПК: E04H 5/00
Метки: здания, каркас, одноэтажного, промышленного
...грани 5 внутрь здания на уровне верхнего обреза 7 фундамента 1 на величину эксцентриситета е равнодействующей силы Р от воздействующих на колонну 2 статических Р, и крановых Р нагрузок.При этом геометрическая ось 8 колонны 2 пересекает геометрическуюось 9 фундамента 1 на уровне еговерхнего обреза 7.Крановая нагрузка Р от мостовогокрана и статическая нагрузка Р, отпокрытия здания, приложенные к колонне 2 с эксцентриситетом соответственно е и е,.Равнодействующая сила Р нагрузокР, и Р передается на колонну 2 сэксцентриситетом е, определяющим величину момента, действующего на колонну 2 и фундамент 1. 74 2Этот момент является отрицательным фактором, так как приводит к повышенному расходу материалов на фундаменты 1 и колонны 2,При смещении...
Устройство для ориентации схвата промышленного робота

Номер патента: 1386447
Опубликовано: 07.04.1988
Авторы: Жаботинский, Криков, Можухин, Силин
МПК: B25J 18/00
Метки: ориентации, промышленного, робота, схвата
...к катушке 6 индуктивности,а второй выход через отверстия встержне 3 и якоре 7 - к обмотке электромагнитного схвата 4, Устройстводля ориентации схвата с помощью хомута 21 крепится на руке 22 промышлен 15ного робота,Устройство работает следующим образом.В начальный момент якорь 7 находится в крайнем нижнем положении,20опираясь краем поверхности 9 на крышку 12 корпуса с подшипником 20, Врабочем режиме при необходимости поворота схвата 4 на требуемый угол спервого выхода источника 5 питания наобмотку 6 подается постоянное напряжение, Так как стержень 3 выполнениз немагнитного материала, то магнитный поток катушки 6 разомкнут, и на 30чинается втягивание якоря 7 в обмотку 6. Величина втягивания (вертикального перемещения якоря 7)...
Привод промышленного робота для струйной обработки

Номер патента: 1390016
Опубликовано: 23.04.1988
Авторы: Дровников, Молчанова, Нуждин, Степанова
МПК: B25J 11/00, B25J 9/14
Метки: привод, промышленного, робота, струйной
...содержит насос 1 переменной производительности, обратныйклапан 2, ресивер 3, Фильтр 4 высокого давления,Заданное давление масла поддерживается клапаном 5, управляемым реле6 давления, предназн,аченным для отключения манипулятора в случае аварийного падения давления масла всистеме, и контролируется по манометру 7. Слив масла из системы вбак 8 осуществляется через теплообменник 9 и Фильтр 10, Блоки распределителей соединены с насосной станциейшлангами и быстроразъемными муфтами 11 и 12,лем промышленного робота с контурнымупр авп ени ем.По каналу 43 из бункера в соплоподается рабочее тело, которое поддавлением выбрасывается на обрабатываемую поверхность детали 44.Внутренняя полость 45 кольцевогосопла 28 соединена с основной лини"ей...
Объемный блок промышленного здания

Номер патента: 1390322
Опубликовано: 23.04.1988
Авторы: Липчинский, Очинский, Попов
МПК: E04B 1/348
Метки: блок, здания, объемный, промышленного
...ция б образует с плитами 4 и 5 сквозные ячейки 8 треугольного поперечного сечения, снабженные по продольным 30 граням ребрами 9. В середине каждой ячейки 8 размещен источник 10 сжатого воздуха, соединенный через ниппельный овод 11 с системой заполнения и удаления воздуха (не показана), Симметрично источнику 10 сжатого воздуха установлены секции в виде трехгранных элементов 12. Секции снабжены торцовыми и пролетными ребрами 13 и 14, причем ребра 14 установлены 40 по периметру подвешенных секций, контактирующих с источником 10 сжатого воздуха, Кроме того, секции 12 закреплены от самопроизвольного вьдвижения наружу стопорными болтами 15,Возможны и другие формы выполнения вьдвижных секций 12 и ячеек 8, например прямоугольная.Объемный блок...
Способ монтажа каркаса промышленного здания

Номер патента: 1392234
Опубликовано: 30.04.1988
Автор: Герзон
МПК: E04G 21/26
Метки: здания, каркаса, монтажа, промышленного
...на фиг, 2.Каркас промышленного здания в пределах температурного отсека содержитнесколько секций, устанавливаемыхи вводимых последовательно. На период эксплуатации устанавливаются вкрайнем пролете, смежном с перспективным, подкрановые балки 1, каждаяиз которых содержит временную инвентарную консольную часть 2, Эта частьсоединена с подкрановой балкой 1 наколонне 3 при помощи фланцев - опорньтх ребер ч и болтов 5, На инвентарной консольной части. 2 установлен 25упор б. Консольная часть 2 прикреплена к соответствующей подкрановойбалке 1 с возможностью съема.При монтаже следующей секции инвентарную консольную часть 2 с упором 6 демонтируют, Затем в последующем крайнем пролете монтируемой секции инвентарную консольную часть 2присоединяют...
Модуль промышленного робота

Номер патента: 1393621
Опубликовано: 07.05.1988
Авторы: Захаров, Островский
МПК: B25J 11/00, B25J 9/00
Метки: модуль, промышленного, робота
...изменение показания датчика 12 малых линейных перемещений. Реверс привода 7 вращательного движения и связанного с ним шкива 1вызывает растяжение уже другого участка гибкого звена, а именно охватывающего ведомый шкив 2,Это удлинение передается первому участку гибкого звена и под действием натяжного ролика 10 метка 131393621 10 Чмсвс-Чмцн Ч максЧмцкс-Чмин ЧагинЧк где Чщ и Ч - максимальное и минимальное значения 30сигнала на датчике,получаемые принастройке модуляна работу в требуе"мом диапазоне точности позиционирования.При движении ползуна вправо сигнал на датчике возрастает до какогото значения Ч;.Если Ч;Чк, 40 то система управления устройством натяжения гибкого звена остается в отключенном состоянии и натяжение гибкого звена остается...
Модуль промышленного робота

Номер патента: 1399110
Опубликовано: 30.05.1988
Авторы: Акинфиев, Андреев, Бабицкий, Ляпин
МПК: B25J 11/00, B25J 9/00
Метки: модуль, промышленного, робота
...с ним криношип 5 и упругий элемент 6, который одним концом связан с кривошипом 5, а вторым -с основанием 1. На криношипе 5 выполнено отнер стие 7, с которымвзаимодействует подвижный фиксатор8, ныполнякций одновременно роль 30включателя привода 9.Модуль промышленного робота снабжен блоком О управления, электрически связанным с приводом 2, муфтой4 и приводом 9, а также датчиком 11положения кривошипа 5 и датчиком 12положения звена 3.Модуль промышленного робота работает следующим образом.В исходном положении муфта 4 вКлючена и кинематически связывает кривошип 5 с подвижным звеном 3, при этомкривошип 5 остановлен фиксатором 8в положении, соответствующем максимальной деформации упРугого элемента 456. По сигналу блока 10...
Схват промышленного робота

Номер патента: 1399112
Опубликовано: 30.05.1988
Авторы: Газизов, Хвощевский
МПК: B25J 15/00
Метки: промышленного, робота, схват
...детали.Схват промышленного робота содержиткорпус 1 с зажимцыми губками 2. Опорная площадка 3 с помощью тяги 4 подвижно установлена на корпусе 1 иподпружинена в крайнее правое положение пружиной 5.Тяга 4 входит в круговой паз кольца 6. К кольцу 6 прикреплена тяга 7,пропущенная через направляющее отверстие кронштейна 8, жестко закрепленного на неподвижной части исполнительного органа 9. На противоположномконце тяги 7 установлен регулируемыйупор 10, взаимодействующий с кронштейном 8 при выдвижении схвата.Схват промышленного робота работает следующим образом,В исходном положении (фиг. 1) 35опорная площадка 3 находится под зажимными губками 2. При выдвижении корпуса 1 с эажимцыми губками 2, опорной площадкой 3 и кольцом 6 вправопроисходит...
Захватное устройство промышленного робота

Номер патента: 1400878
Опубликовано: 07.06.1988
Авторы: Кормильцев, Лелькина, Соколов, Шадрин
МПК: B25J 15/00
Метки: захватное, промышленного, робота
...предприятие, г, Ужгород, ул. Проектная, 4 Изобретение относится к машиностроению, станкостроению, приборостроению и другим областям техники,где необходимо осуществлять захватдеталей и их передачу посредствомроботов и манипуляторов.Цель изобретения - повышение эксплуатационной надежности за счетвведения между захватными рычагами 10и эластичным баллоном жесткой оболочкой, полустаканы которой закрепленына захватных рычагах,На чертеже показано захватноеустройство, 15Захватное устройство имеет корпус1, зажимные рычаги 2, выполненные ввиде упругих пластин, смонтированныхна корпусе 1, подпружиненных однаотносительно другой, и съемных губок 203, упирающихся друг в друга.Пневматический привод 4 выполненв виде эластичного...
Многопозиционный захват промышленного робота

Номер патента: 1400879
Опубликовано: 07.06.1988
Авторы: Зимин, Коряев, Омельяненко, Петровский
МПК: B25J 15/00
Метки: захват, многопозиционный, промышленного, робота
...фиг.5 - многопозиционный захват при захватывании полых деталей, общий вид; на фиг.6 - то же,при внутреннем и наружном расположении неподвижных губок, общий вид.Многопозиционный захват содержиткорпус 1, привод в виде силовогоцилиндра 2, шток 3 которого снабженмногогранной косозубой рейкой, находя щейся в зацеплении с косозубыми рейками 4, подвижно установленными вкорпусе 1, подвижные губки 5, закрепленные .на косоэубых рейках 4, неподвижные губки 6, закрепленные на каретке , установленной в направляющем паве корпуса 1 с возможностьюперемещения в направлениях движенийподвижных губок 5, центрирующие пружины 8, размещенные между корпусом 1 30и кареткой 7. Губки 5 и 6 захватывают детали 9. Многопозиционный захват работаетследующим образом....
Схват промышленного робота

Номер патента: 1404336
Опубликовано: 23.06.1988
Авторы: Гонопольский, Рейдман
МПК: B25J 15/00
Метки: промышленного, робота, схват
...1 и 2, на плече каждогоиз которых закреплены призматическиегубки 3 с укрепленными на иих мембранами 4. Под мембранами 4, в телекаждой губки со стороны ее рабочейповерхности выполнена герметичная полость, в которой установлен поршень5 и пружина 6. Полость между поршнем5 и мембраной 4 заполнена ферромагнитной жидкостью 7. На внешней стороне каждой губки закреплена электрическая обмотка 8. Позицией 9 обозначена захватываемая деталь.Схват промышленного робота работает следующим образом.При захвате детали 9 губки 3 подвоздействием рычагов 1 и 2 сводятся 30к ее поверхности. Происходит центрирование детали на призматической поверхности губок и деформирование мембраны 4 по форме зажимаемой детали,При этом избыток ферромагнитной жидкости 7...
Исполнительный орган промышленного робота

Номер патента: 1404337
Опубликовано: 23.06.1988
Авторы: Артаров, Бармас, Беккер, Волоценко, Цойрев
МПК: B25J 15/00
Метки: исполнительный, орган, промышленного, робота
...Ужгород, ул, Проектная, 4 Изобретение относится к машиностроению, в частности к промышленнымроботам, предназначенным для использования в совокупности с металлообрабатывающим оборудованием,5Цель изобретения - упрощение конструкдии, снижение материалоемкостии массогабаритных параметров за счегприменения единого централизованногопривода перемещения всех подвижныхэлементов.На чертеже показан исполнительныйорган промышленного робота (ПР)В корпусе 1, который крепится круке ПР, в опорах качения установленвал 2. С валом жестко связана пово"ротная головка 3, несущая два иден.тичных захвата. Каждый захват состоит из Фланца 4, установленного в немдиска 5 со спиральным пазом, сопряженных с ним подвижных губок 6 и "планшайбы 7. Установленное в...
Устройство для промышленного приготовления субстрата при выращивании грибов

Номер патента: 1407462
Опубликовано: 07.07.1988
Авторы: Кирдода, Лефлер, Медуха
МПК: A01K 1/04
Метки: выращивании, грибов, приготовления, промышленного, субстрата
...в шахматном порядке лопасти 4, на концах которых закреплены вогнутые билы. На , боковом торце емкости установлен меха-низм подачи, выполненный в виде распределителя 5 с патрубками для периодической подачи воздуха, пара и воды. Над люками 2 установлен транспортер 6 с конусообразным распределителем 7, под которым установлены бунке" З 0 ры 8, Для регулирования избыточного давления в емкости установлен меха, низм удаления вредных газов, выпол ненный в виде клапана 9.Устройство работает следующим об разом.Компоненты, входящие в состав суб страта, например солома и другие ор ганические вещества, после обработки в теплой воде транспортером 6 подают ся на конусообразный распределитель 7 и по гладким плоскостям его соскальзывают в крайние...
Схват промышленного робота

Номер патента: 1407801
Опубликовано: 07.07.1988
Автор: Далакян
МПК: B25J 15/00
Метки: промышленного, робота, схват
...установки стопорного винта 9.Ведущие 3 и промежуточные 4 фаланги снабжены промежуточными зубчатымиколесами 10, введенными в зацепление с соответствующими зубчатыми колесами 6-8, Зубчатые колеса 6 ведущихфаланг обоих пальцев схвата находятся в зацеплении друг с другом, причвм одно из зубчатых колес 6 кинематически связано с приводом (не показано) .Например, с помощью шпонки 11,соединяющей ось 2 с одним иэ зубчатыхколес 6 (фиг.2), смежные фалангиснабжены регулируемыми по усилиюфиксаторами относительного положения,выполненными, например, в виде подпружиненных шариков 12.Схват робота работает следующимобразом,После поступления команды на захват детали включается привод, вращающий одно из зубчатых колес 6. Этовращение передается всем...
Каркас многоэтажного промышленного здания

Номер патента: 1413225
Опубликовано: 30.07.1988
Авторы: Гарифулин, Елисеенко, Кирсанов
МПК: E04H 5/02
Метки: здания, каркас, многоэтажного, промышленного
...промышленного здания включает двутавровые колонны 1, конструкции покрытия 2, образующие с колоннами 1 рамы 3, и перекрытия 4.Колонны 1 установлены стенкой 5 из плоскости рам 3.Перекрытия 4 выполнены неразрезными из пространственных блоков 6, образованных из ортотропных плит 7, 8, соединенных между собой решеткой 9 из вертикальных 10 и наклонных 11 стержней, пространство между которыми может быть использовано.Блоки 6 прикреплены к стенкам 5 колонн 1 шарнирно наклонными стержнями 11 в уровне верхней ортотропной плиты 7.Между собой блоки соединены накладками 12, что обеспечивает неразрезность перекрытий 4 в двух направлениях. В крайних, наименее нагруженных колоннах 1 возможно защемление перекрытий, что повышает жесткость каркаса в...
Модуль промышленного робота

Номер патента: 1414618
Опубликовано: 07.08.1988
Автор: Камский
МПК: B25J 1/02, F16K 11/02
Метки: модуль, промышленного, робота
...стенки 5 и 6 кареткиимеют впускные 11 и выпускные 12 каналы. Впускныс каналы 1 о стороны полости 9 перекрывакггся пластинами 3, а выпускные каналы 2 со стороны рукавов 7 и 8 перекрываются пластинами 4. Пластины 3 и 14 попарно установлены на осях 15 и 16, соеди ены 1)1 чагами 17 и тягами 18 с электромагнитами 9 и 20 привода распределителя 4.Устройство работает следукйщим образом.Полость 9 находится под постоянным давлением сжатого воздуха, поступаюцего из магистрали 1 О. В статическом состоянии впускные каналы 11 перекрыты пластинами 3, а выпуксные 2 открыты и сообцают полости гофрированных рукавов 7 и 8 с атмосфсрой. Тормоз 2 удерживает карегку . Для перемещения кареткивлево к обмотке электромапита 20 подается напряжение, в резульгате...
Захватное устройство промышленного робота

Номер патента: 1419878
Опубликовано: 30.08.1988
Авторы: Горская, Кузьмичев, Лебедев, Рязанов, Унтилова
МПК: B25J 15/00
Метки: захватное, промышленного, робота
...пазах корпуса 1 и подпружиненных пружинами 13 и 14. Ролики 9и 10 перемещаются в пазах клина 4.На рычагах 15 и 16 шарнирно установлены захватные губки 17 и 18, каждая из которых подпружинена соответственно пружинами 19,20 и 21,22,На корпусе 1 захватного устройства жестко закреплены втулки 23 ишайба 24, а на корпусе привода 2 линейного перемещения жестко установлена втулка 25, расположенная с возможностью вращения в шайбе 24. Втул 2. Ролики 9 и 10 перемещаются в пазах клина 4. Корпус 1 захватногоустройства шарнирно устанввлен накорпусе привода 2 линейного перемещения. Шайба 24, установленная жестко на корпусе 1 захватного устройства, связана с втулкой 25, жесткоустановленной на корпусе привода 2,с помощью пружин кручения, возвращающих...
Модуль промышленного робота

Номер патента: 1421524
Опубликовано: 07.09.1988
Авторы: Аркатов, Киреев, Попов, Шевченко
МПК: B25J 9/08
Метки: модуль, промышленного, робота
.... отключает обмотки электромагнитов 18 и 19, формирует импульсы коммутации фазных обмоток 12-17. Эта коммутация вызывает перемещение якорей 4 и 5 в запрограммированном направлении.При перемещении якорей 4 и 5 их ступени, перемещаясь относительно , датчиков 24 и 25, вырабатывают импульсы, соответствующие их чередова" нию. При этом число этих импульсов, кратное числу переместившихся ступеней якорей 4 и 5, сравнивается с числом, записанным в памяти соответствующей программы, на основании чего блок 23 управления измеряет частоту комму" тации импульсов в блоках 21 и 22 коммутации и вьдает сигналы на подключение соответствующих Фазных обмоток 12-17 к источнику постоянного тока, размещенному в блоке 21 (22) коммутации, за счет которого...
Модуль промышленного робота

Номер патента: 1421525
Опубликовано: 07.09.1988
МПК: B25J 9/08
Метки: модуль, промышленного, робота
...упругой ленты закреплены при помощи шарниров 6 (фиг. 2), служащих для равномерного распределения напряжений в ленте, 50Модуль работает следующим образом.При подаче воздуха (жидкости) в правую полость цилиндра 1 поршень 2 со штоком 3 и.планкой 5 перемещается влево. 55При движении штока 3 происходит изгиб упругой ленты 4 в плоскостие движения штока, а так как сопротивление лента изгибу в указанной плоскости незначительно, движению штока пре- . пятствует небольшая сила, угловому же смещению штока 3 в плоскости, перпендикулярной оси движения последнего, лента 4 препятствует благодаря своему расположению на элементах модуляПри движении штока 3 вправо воздух подается в левую полость цилиндра 1, а работа упругой ленты проис" ходит аналогично...
Способ реконструкции покрытия промышленного здания

Номер патента: 1421843
Опубликовано: 07.09.1988
Автор: Мещеряков
МПК: E04G 23/00
Метки: здания, покрытия, промышленного, реконструкции
...затягивания гаек на верхних концах крюков плиты 5 и 7 плотно прижимают к нижнему поясу балок 9, образуя тем самым пакет плит.Далее кантуют полученный пакет плитвокруг вышележащего его ребра 11 до расположения пакета в одной плоскости со следующей вышерасположенной плитой 12 и временно фиксируют пакет в таком положении, При этом крюк троса может быть 0 заведен в отверстие на конце верхнегопояса балок 9 или зацеплен за специально приваренную к балке петлю. Временная фиксация полученного пакета может быть осуществлена установкой, например, металлических стоек, подкладок под ребра 55 плит (не показаны).Далее заменяют балки 9 на болеедлинные с размешением их концов над крайними ребрами следующего пакета т. е.длину балок принимают,на менее...