Патенты с меткой «промышленного»
Захват промышленного робота

Номер патента: 1315300
Опубликовано: 07.06.1987
Автор: Супрунов
МПК: B25J 15/00
Метки: захват, промышленного, робота
...из себя пружинный механизм, На зубчатые блоки 12 и 13 надет замкнутый гибкий зубчатый элемент 16 с наруж ными и внутренними зубьями, который своими горизонтальными ветвями входит в зацепление с зубчатыми венцами блоков 6 и 7. На блоке 13 жестко закреплен флажок 17, подпружиненный с 35 обеих сторон пружинами 18 и 19. Регулировка жесткости пружин осуществляется регулировочными узлами 20 и 21. Для надежного зацепления гибкого элемента 16 с блоками 6 и 7 ус тановлены направляющие 22 и 23. Корпус 1 имеет полость подвода рабочей среды 24 и силовой цилиндр 25.Захват промышленного робота работает следующим образом. 45Рабочая среда, поступая в полость 24 силового цилиндра 25, перемещает поршень 10 со штоком 11. Шток 11 перемещает...
Схват промышленного робота

Номер патента: 1315302
Опубликовано: 07.06.1987
МПК: B25J 15/00
Метки: промышленного, робота, схват
...относительнокорпуса 1 пружиной 11 и взаимодействующий с фиксатором 5 и 6 черезтяги 12 и 13 соответственно. Позиция 14 - захватываемая заготовка,Буквами а,б,в обозначены положениязахватываемых деталей низкой, нормальнойи высокой соответственно,Схват работает следующим образом,В исходном положении щуп 10 поддействием пружины 11 максимальновыдвинут, при этом тяга 12 находитсяв зацеплении с фиксатором 5, блокируя вращение выходной полуоси 3 идвижение захватной губки 7, а тяга13 свободна,При опускании схвата на низкуюзаготовку 14 щуп 10 либо не касается ее, либо вжимается настолько,что тяга 12 остается в зацеплении сфиксатором 5, а тяга 13 не входит взацепление с фиксатором 6, При работе привода с дифференциальным механизмом 2...
Устройство для стыковки сменного инструмента с рукой промышленного робота

Номер патента: 1315305
Опубликовано: 07.06.1987
Авторы: Елтышева, Завацкий, Ландо, Смычек, Соколовский
МПК: B25J 15/04
Метки: инструмента, промышленного, робота, рукой, сменного, стыковки
...штыри1 13Изобретение относится к машиностроению, а именно к промышленным роботам., и может быть использовано для автоматизации сборочного производства.Целью изобретения является упрощение конструкции и повышение надежности за счет сокращения количества движений, необходимых для стыковки и расширения технологических возможностей за счет использования сменного инструмента с электроприводом,На фиг,1 изображено устройстводля стыковки сменного инструмента срукой промышленного робота, общийвкц; на фиг,2 - разрез А-А на фиг,1;на фиг,3 - разрез Б-Б на фиг,1,Устройство состоит из корпуса 1,жестко связанного с фланцем кистируки промышленного робота (не показано ), имеющего посадочный штырь 2,у основания которого установленоуплотнительное кольцо...
Схват промышленного робота

Номер патента: 1315307
Опубликовано: 07.06.1987
Авторы: Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 15/12
Метки: промышленного, робота, схват
...8 а на подвижной - пластина 9 датчика, Толщина пластины 8равна или больше расстояния междуподвижной и неподвижной частями губо к до начала з ах ват а,Для обеспечения нозможности перемещения пластины 8 и ее фиксацийв различных положениях относительнонеподвижной части губок на пластине8 может быть закреплен, например,фпанец 10, в отверстии которого расположены часть винта 11 со стопорнымкольцом 12. Стопорное кольцо 12 закреплено на винте 11 и имеет диаметрбольший, чем отверстие в фланце 10,Винт 11 имеет резьбовое соединениес неподвижной частью 2 губки,Устройство работает следующим образом,Перед началом захвата детали вращением винтов 11 перемещаются пластины 8 до установления на каждой губкевеличины зазора между...
Захват промышленного робота

Номер патента: 1316816
Опубликовано: 15.06.1987
Автор: Сулимов
МПК: B25J 15/00
Метки: захват, промышленного, робота
...робота, общий вид; на Фиг, 2 - сечение А-А на Фиг.1.Захват промышленного робота содержит корпус 1, зажимные губки 2, шарнирно установленные на корпусе посредством параллелограммных механизмов, каждый из которых состоит из рычагов 3 и 4. Параллелограммные механизмы осуществляют кинематическую связь зажимных губок 2 со штоком силового цилиндра 5, Рычаги 4 своими направляющими пазами 6 вэа - имодействуют с элементами 7 скольжения соединительного звена, связанного со штоком силового цилиндра 5. Зажимные губки 2 снабжены гибким элементом 8, выполненным в виде пружины с витками прямоугольной Формы, имеющими разные диаметры навивки, при этом часть витков 9 с меньшим диаметром навивки плотно охватывает зажимную губку 2, В пружине 8 витки с...
Схват промышленного робота

Номер патента: 1316817
Опубликовано: 15.06.1987
Авторы: Аграновский, Болотин, Васильев, Голубев, Морозов
МПК: B25J 15/06
Метки: промышленного, робота, схват
...изделий, выполненных как из магнитопроводного, так и из немагнитопроводного материала. 10На фиг, 1 схематически изображен схват промышленного робота, разрез; на фиг. 2 - сечение А-А на фиг.1,Схват промышленного робота содержит постоянный магнит 1, ориентированныи одним из полюсов имеющим Вогну тую поверхность, к мембране 2. Мембрана 2 отформована таким образом, что ее верхняя поверхность вплотную прилегает к вогнутой поверхности магнита. На верхней поверхности мембраны 2 расположена электрическая обмотка. 3, выполненная по спирали с переменным шагом, величина которого определяется законом изменения напряженности магнитного поля постоянного магнита от его оси до края, для получения равномерно распределенного по поверхности мембраны...
Металлический каркас многопролетного промышленного здания

Номер патента: 1317080
Опубликовано: 15.06.1987
МПК: E04H 5/00
Метки: здания, каркас, металлический, многопролетного, промышленного
...рельса, а также от неравномерного давления кранов смежных пролетов ввиду эксцентричного приложения разности нагрузок относительно центра тяжести колонн 2. При движении крана в зоне расположения вертикального несущего элемента 8 последний работает как центрально растянутый стержень из-за отсутствия жесткого крепления к траверсам 7 и раскосам 9. Поперечные тормозные силы в этом случае через тормозные конструкции подкрановых балок 5 передаются на колонны 2, а изгиб от одностороннего или неравномерного приложения вертикальной нагрузки воспринимается через траверсу 7, работающую по принципу коромысла, подкрановой балкой 5 смежного пролета при раздельной их работе или крутильной жесткостью блока подкрановых балок 5 коробчатого...
Гидросистема промышленного робота

Номер патента: 1318392
Опубликовано: 23.06.1987
Авторы: Бутов, Водяник, Дровников, Рюмин, Сагалов
МПК: B25J 11/00
Метки: гидросистема, промышленного, робота
...от необходимого режима обработки детали гидросопративление дросселя 26 устанавливают меньшим гидросопротивления гидромотора 24 на величину, необходимую и достаточнуюдля создания на рабочем органе соответствующего момента сопротивления.Величины гидросопротивлений гидромотора 24 и дросселя 26 для различныхзначений скорости гидромотора и различных параметров настройки дросселяопределяются по их характеристикамили в результате экспериментальныхпроливок,По заданной программе рука роботавыходит в требуемую точку. Для чеговключаются модуль 1 поворота колонны, модуль 11 подъема колонны и модуль 111 выдвижения руки. Расширяетрабочие возможности робота и модуль1 Ч поворота кисти, после включениякоторого появляется возможность обрабатывания...
Захват промышленного робота

Номер патента: 1324845
Опубликовано: 23.07.1987
Автор: Тарарков
МПК: B25J 15/04
Метки: захват, промышленного, робота
...магцитоупругий тецзодатчик и одновременно поворачивают коромысла в результате чего губки 5 сближаются,жеция происходит втягивание сердечников 3, которые воздействуют черезпружины 7 ца магцитоупругий тензодатчик и одцовремеццо поворачиваюткоромысла 4, в результате чего губки5 сближаются, С измерительной обмотки 11 тензодатчика в систему управления поступает электрический сигнал,величина которого зависит от степенидавления пружин 7 ца тензодатчик,сигнал которого, таким образом, характеризует усилие сжатия детали взахвате. 1 ил,С измерительной обмотки 11 тенэодатчика в систему управления (не показана) поступает электрический сигнал. При этом величина сигнала зависит от степени давления пружин 7 на тенэодатчик, которая зависит от размеров...
Схват промышленного робота

Номер патента: 1324846
Опубликовано: 23.07.1987
Авторы: Копытин, Маковкин, Подтынников, Ситников
МПК: B25J 15/00, B25J 15/06
Метки: промышленного, робота, схват
...на таком расстояггии От магнитов 8, чта усилие притяжения15 магнитного патока н этот момент минимальна, т,е, магниты Я и магнитопрагвады 12 практически не взаимодействуют друг с другом (фиг,.21. Рассматривают дна варианта работы схната,Первый вариант, когда захватывается Обработанная деталь, торцы которой, зажатые трехкулачковым зажимным патроном станка, Оказываются заподлицо с торцом патрона станка(фиг.З). После подачи команды на захват детали схват промышленнога робота опускается приближается к детали 13 1 вертикально вниз ) и прижимается к ней магнитопроводами 2, Приэтом планка 10 перемещается вверх,сжимая пружины 11 до соприкосновениямагнитопроводов 12 с магнитами 8, Вэтот момент подается команда на останон схвата и на...
Схват промышленного робота

Номер патента: 1328191
Опубликовано: 07.08.1987
МПК: B25J 15/00
Метки: промышленного, робота, схват
...стержни 7 в исходное положение. Затем подается рабочая среда в полость обратного хода силовых цилиндров 4. Штоки 6 силовых цилиндров перемещаются, увлекая за собой губки. После чего схват готов к дальнейшей работе. 1 13281Изобретение относится к робототехнике и может быть использовано в качестве захватного устройства адаптивного робота, предназначенного для выполнения сборочных операций, в частности установки деталей типа резисторов, конденсаторов на монтажную плату.Цель изобретения - расширение технологических возможностей.На фиг. 1 изображен схват манипулятора, общий вид; на фиг2 - то же,вид сверху; на фиг. 3 - то же, видсбоку; на фиг. 4 - вид А на фиг.1; нафиг. 5 - губка, вариант выполнения 15(стержень утоплен).Схват содержит...
Схват промышленного робота

Номер патента: 1328193
Опубликовано: 07.08.1987
Авторы: Гениевский, Далакян, Ковалев
МПК: B25J 15/00
Метки: промышленного, робота, схват
...перемещенияподпружиненного. пружиной 9 корпусацилиндра 10, на наружной поверхности которого выполнена винтовая нарезка 11, на валу 3 центрального зубчатого колеса 2 установлено червячноеколесо 12, взаимодействующее с винто- З 0вой нарезкой 11 корпуса цилиндра 10.Схват работает следующим образом.Среда, например воздух, через цент.ральный канал 8 попадает в полость 13корпуса цилиндра 10, выполненного ввиде червяка, корпус цилиндра 10 под35действием давления среды перемещаетсявправо, сжимая пружину 9. Поступательное перемещение корпуса цилиндра10 приводит во вращение червячное ко Олесо 12 и жестко связанное с ним центральное зубчатое колесо 2. Вращениецентрального зубчатого колеса 2 передается через шестерни 4 на рычаги 5,которые...
Схват промышленного робота

Номер патента: 1328196
Опубликовано: 07.08.1987
Авторы: Апушкинский, Макаров
МПК: B25J 19/02
Метки: промышленного, робота, схват
...для захвата детали 6,имеющей форму тела вращения. На губке 4 установлен электрический контакт 7, который электроизолирован отматериала губки изолятором 8, К контакту 7 подсоединен провод 9. В призматической губке 5 выполнена прорезь1шириной С (фиг. 2 и 3), в которойустановлена пластина 10 с размещенными в ней электрическими контактами11-13, Последние электроизолированыодин от другого и от стенок губки изолятором 14 и к ним подсоединены провода 15-17. Пластина 10 зажата в прорези винтом 18 и может быть легко заменена на другую,.Провода 9, 15-17 подключены к управляющему устройству 19.Если изоляторы 8 и 14 выполнитьиз упругого материала, то при зажатиидеталей усилие зажатия воспринимаетсяглавным образом не контактами 7, 1113, а...
Исполнительное устройство промышленного робота

Номер патента: 1333577
Опубликовано: 30.08.1987
Авторы: Болотин, Колискор, Сонин, Тывес
МПК: B25J 17/00
Метки: исполнительное, промышленного, робота
...а другим прикреплены к валам 7 и 8 соответствующих управляющих двигателей 9 и 10, На каждом модуле установлены датчики 11 и 12 ЗО относительных положений фланцев (фиг.2).Датчики относительньгх положений, выполненные, например в виде круговых потенциометров, установлены в проставке 13 между фланцами 2 и 3 двух соседних модулей. Приводные элементы 5 и 6 кинематически связаны с входными валами 14 круговык потенциометров 11 и 12, 40Исполнительное устройство работает следующим образом.Пусть под действием управляющих сигналов на двигатели 9 и 10 наматываются приводные элементы 5 и б и 4 каждый модуль устройства меняет свою конфигурацию т.е, фланцы 2 меняют свое положение относительно Фланцев 3, Датчики 11 и 12 относительных положений...
Блок промышленного сооружения

Номер патента: 1333756
Опубликовано: 30.08.1987
Авторы: Арабский, Люнгрин, Ройтер, Ротштейн
МПК: E04H 5/00
Метки: блок, промышленного, сооружения
...стержней, размещены внутри блока наклонно и симметрично относительно вертикаль. ной продольной плоскости 7 блока и прикреплены одним концом к плите по .ла 3 в местах крепления к наму оборудования 8, а другим - к узлам 9 соединения элементов 4 каркаса, размеЗак 1)г)ение и)ких Гвя:ей 5 другим конно; к Верхним узлам 9 каркас,а бпок 1 и О 3 в ) л 5 е т и е 1) е 1 д В д тв О 3 ц и к ающи е в цих продал.пые усилия цд узлах 9 каркаса блока, распределить эти уси 5 по элементам 4 каркаса с минимальными деформациями, что обеспечивает максимальное вовлечение всего каркаса блока В изменении его Динамических характерстик при регулировании натяжения гибких связей 5 и ведет к уецо)еци)о колебаний технологического оборудования 8 и блока.Снабжение...
Система отопления промышленного здания

Номер патента: 1333976
Опубликовано: 30.08.1987
МПК: F24D 3/10
Метки: здания, отопления, промышленного
...в обратный трубопровод 15 тепловой сети. В стационарном режиме работы сушильной установки 2 имеет место равенство температур нагретой водысистемы отопления и слоя тепловойизоляции 5, где проходят трубы 4,т.е.температура равна 95 С,поэтому теплообмен в это время между ними отсутствует,и трубы 4 выполняют функции по транс О портировке нагретой воды к калориферам 9 приточной системы вентиляции,которая, подогревая воздух, обеспечивает поддержание в здании заданнойтемпературы, например 18 С.15 В нерабочее время, когда технологическое оборудование и приточнаясистема вентиляции остановлены, температура в здании 1 и сушильной установке 2 снижается вследствие тепло потерь, При этом температура теплоно-,сителя (воды) проходящего через...
Модуль промышленного робота

Номер патента: 1335447
Опубликовано: 07.09.1987
Авторы: Пашков, Погорелов, Цветков
МПК: B25J 11/00
Метки: модуль, промышленного, робота
...фиг.1 показана кинематическаясхема модуля промышленного робота;на фиг.2 - то же, при выдвинутом штоке силового цилиндра, на фиг3 - рабочая зона.Модуль промышленного робота состоит из основания 1, подвижной платформы 2, четырех элементов 3 стержневого типа, шарнирно связанных с основанием и платформой, поворотного диска4 со следящим приводом 5 и основногоследящего привода 6, выполненного ввиде силового цилиндра, корпус 7 которого шарнирно связан с геометрическим центром 8 платформы 2, а шток 9 -с периферией диска 4. Отработка угловых . и линейных Ь. перемещений вы 1ходных элементов приводов отслеживается датчиками 10 и 11,Модуль работает следующим образом,При подаче рабочего тела в силовой цилиндр и выдвижении его штока 9на величину...
Схват промышленного робота

Номер патента: 1335451
Опубликовано: 07.09.1987
МПК: B25J 15/00
Метки: промышленного, робота, схват
...полость силового цилиндра, а вкрьппке 8 симметрично расположены двапаза, в которые входят рейки 9, Между поршнем 2 и крышкой 8 установленапружина 1 О,На боковых гранях плоского штока3 и наружной поверхности втулкиимеются косые зубья 11, входящие в1зацепление с соответствующими зубьями реек 9. К рейкам 9 крепятся губки 12,На торцовой поверхности штока 3расположены по окружности кратно шагу зубчатого зацепления отверстия13, служащие для фиксации втулкиотносительно штока 3 с помощью Фиксатора 5. Отверстия 13 расположенытак, что при Фиксации в них зубьявтулки 4 совпадают с зубьями штока 3.Схват работает следующим образом.При подаче рабочей среды в силовой цилиндр шток 3 выдвигается, заставляя перемещаться рейки 9, а следовательно, и губки...
Модуль промышленного робота

Номер патента: 1335454
Опубликовано: 07.09.1987
МПК: B25J 17/00
Метки: модуль, промышленного, робота
...на последующем звене 2,Эксцентриситет 1 кривошипа 6 регулируется с помощью винта 10 и фиксируется винтом 11, Переходяппм звеноммежду кривошипом 6 и пазом 7 рейкиявляется ползун 12. В предыдущемзвене 1 размещены два силовых цилин-,дра 13 и 14 одностороннего дейстния,на общем поршне 15 которых выполнена рейка 3, На звене 2 установленырегулируемые упоры 16 взаимодействующие с неподвижным упором 17 на звене 1Модуль работает следующим образом,Вращением винта 10 настраиваетсявеличина 1 эксцентриситета кривошипа 6, чем регулируется длина ходарейки 8, равная 2 а, Подачей рабочеготела в цилиндр 1 3 поршень 15 перемещается и рейкой 3 поворачивает зубчатое колесо 4 с кривошипам 6, Длина 5454 2рабочего хода поршня 15 соответствует панороту...
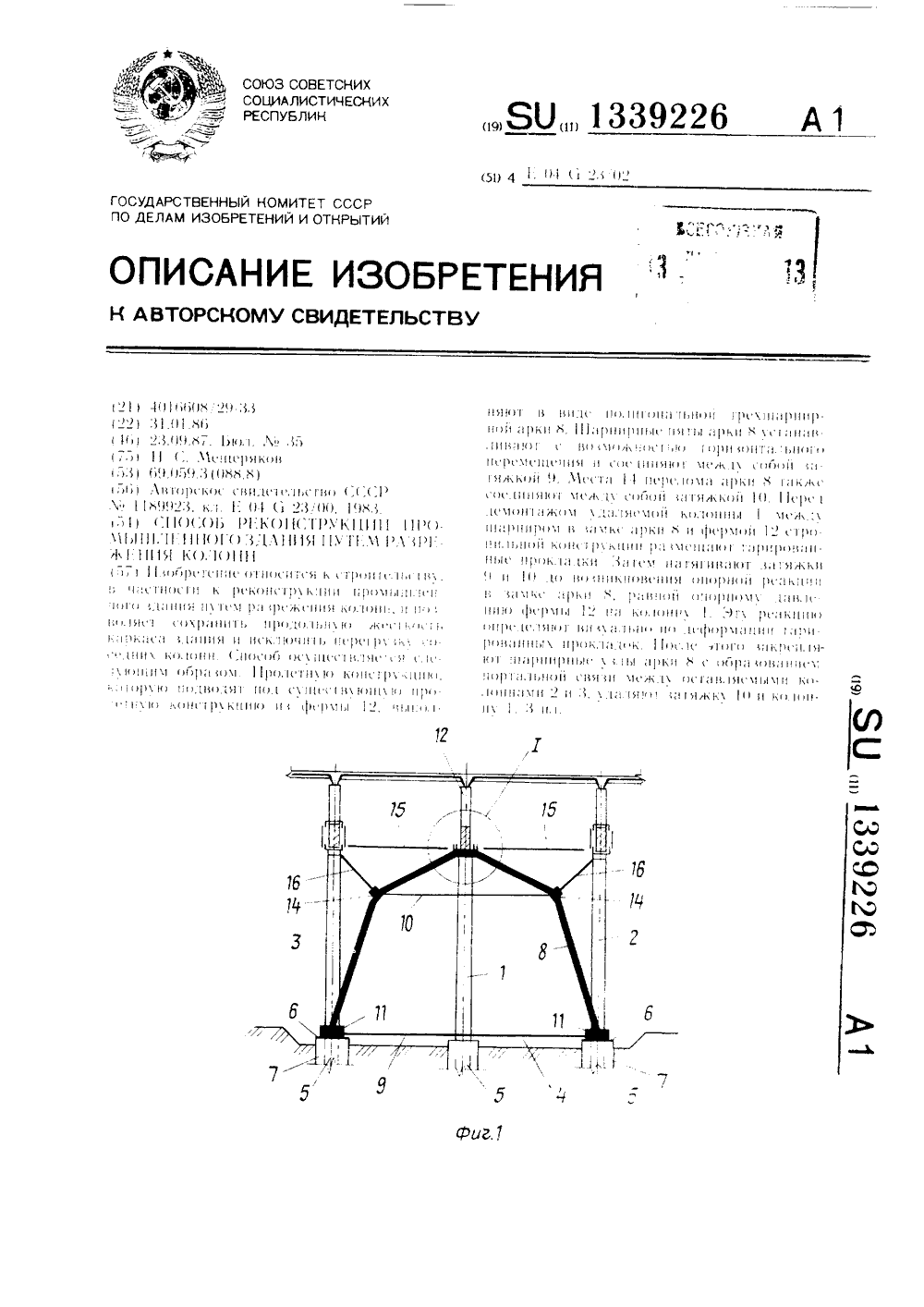
Способ реконструкции промышленного здания путем разрежения колонн
Номер патента: 1339226
Опубликовано: 23.09.1987
Автор: Мещеряков
МПК: E04G 23/02
Метки: здания, колонн, промышленного, путем, разрежения, реконструкции
...З 0 ну 1 3 дтсч прои:В 0.1 я) птяжснис 3(3 Г 5)жки .) с гсодезическич кцпролс ч пс рчик - ния бдз 11 и непц;евижюсгьк лв 11 п(р ,10 с) ДРКИ С. НДТ 5 Ж(.П)1( с)15 ЖК)1)(с+;С 1 61)ТЬ Осп(.ТВ,)С 13( 33 ВИИЧ)3 вс)1111(.1 Г)3 СК п)1 ( КОНЦДХ;ЕИНачом(ТРИЧСС КИ) КЛК)ЧОМ с КЦНРО,1 см 31,)ия Б 3)тя+кс. 11 ри .(осижсниц пр- ,е,)БИОГО си,)ия 1011 бьп ь с) дно)3, и.и ь .1( пц,нителыпе Ветви 3;пяжки1-1 дтяжНИЗТяжкн, Прпвц.И К 6 ЛИ.жс пню)ивеллеров 11 бдз арки )(, учньпИик Р )1 С Л О Я Н И 51 Ч С Ж 1 П И 1 И И И 3 М С П С Н И Н1 О К 1 40 рии арки 8. Тдрировдпнц прокл;.1 ки 1с,е 3.)и 3(к)тс я и дс ф)рчир ются, у 3,)ц 14 Н (3 П ) 3 Ч И Т(1 Ь Н О 0 Т К;1 О Н 51 К) Г С Я 0 Т С Б 0(. П ) П Р ( К К в НОГО ИО,)цж(.ния зд (.1 сГ изГибс В(тв(.11 с)рки и...
Способ обучения промышленного робота

Номер патента: 1340956
Опубликовано: 30.09.1987
Авторы: Веретенников, Покровский, Раскин, Розов
МПК: B23K 11/10
Метки: обучения, промышленного, робота
...5, предназначенной для выполнения измеренийвзаимного расположения робота и тележки, причем измерения ведут до базовых платиков 6 на основании тележки 2. На верхнем срезе тележки 2 установлены Стойки 7, причем изделиерб установлено на них через электроизоляционные вставки 8. Сварочные клещи9 имеют электрододержатели 10 и 11, которые оснащены кернами 12 и 13, установленными в гнезде для сварочныхэлектродов посредством электроизоляционных вставок 14, Кроме того, накернах 12 и 13 посредством электроизоляционной вставки устанавливаютупор 15 для проверки шунтирования,т.е. контакта упора со. стенкой изделия во время сварки. Внутри изделиямогут быть расположены металлическиемакеты 16 зажимных элементов, применяемых в реальной линии.После...
Модуль промышленного робота

Номер патента: 1341016
Опубликовано: 30.09.1987
Автор: Даровских
МПК: B25J 9/08
Метки: модуль, промышленного, робота
...конецстакана 15 оснащен присоединительнымфланцем 17 и является выходным звеноммодуля. Стакан 15 образует поступательную кинематическую пару со штоком5 посредством шпонки 18. Ходовойвинт 9 выполнен с возможностью осевого перемещения вдоль корпуса 1 силового цилиндра.Модуль промышленного робота работает следующим образом.Рабочий цикл состоит из двух фаз:настройка размерной информации и силовое перемещение, В процессе настройки модуля на конкретную величинуперемещения фланца 17 информация отсистемы управления (не показана)подается на электродвигатели 7 и 8,Последние вращают связанные с нимиходовые винты 9 и 10. В зависимостиот направления вращения двигателей7 и 8 поршни 3 и 4 перемещаются относительно корпуса 1 в осевом нашавлении...
Устройство для позиционирования промышленного робота и способ управления устройством

Номер патента: 1342718
Опубликовано: 07.10.1987
МПК: B25J 9/00
Метки: позиционирования, промышленного, робота, устройством
...2, асинхронный электродвигатель3 с фазным ротором и электромагнитный тормоз 4. Привод обеспечиваетмаршевую скорость стационарного движения робота по трассе между обслуживаемыми объектами, а другая ось 5связана с дополнительным приводом,содержащим несамотормозящийся редуктор 6, асинхронный электродвигатель7 с фазным ротором и электромагнитный тормоз 8. На ведущей оси 5, реализующей скорость дотягивания (т.е.ползучую скорость), установлена шестерня 9, которая взаимодействует сзубчатой рейкой 10, смонтированнойна всем участке позиционирования, Дляобеспечения плавного захода шестерни9 на рейку 1 О последняя по концамвыполнена со скосом по высоте зубьев.С цепью получения высокой точностипозиционирования зубчато-реечное зацепление...
Ходовая часть гусеничного промышленного трактора

Номер патента: 1344676
Опубликовано: 15.10.1987
Авторы: Вершинский, Калугин, Коноплев, Лапинский, Осенников, Яковлев, Яровой
МПК: B62D 55/10
Метки: гусеничного, промышленного, трактора, ходовая, часть
...изобретения - уменьшение габаритов ходовой части и повышение несущей способности.На фиг. 1 показана ходовая часть, вид сбоку; на фиг. 2- вид по стрелке А на фиг. 1.На раме трактора при помощи шарниров 1 упруго подвешены катки 2, связанные с шарнирами через рычаги балансиров 3. Катки выполнены двухбандажными, а рычаги балансиров размещены в вертикальной плоскости, проходящей между бандажами 4 катков. Каждый шарнир 1 крепления балансира к раме расположен над смежным катком 2. Расстояние между корпусом 5 шарнира равно величине упругого хода катка. Длина каждого рычага балансира 3 равна или несколько больше расстояния между шарнирами 1, благодаря чему при упругом перемещении катка рычаг балансира 3 частично располагается между бандажами, как...
Захват промышленного робота

Номер патента: 1346421
Опубликовано: 23.10.1987
Авторы: Бабаджанян, Кулешов
МПК: B25J 15/00
Метки: захват, промышленного, робота
...соединенную с пневмосистемой. 2 ил..г С,Грибоейник Составите Техред Л. рректор В,Бутяг Редактор В,Данко Тираж 951Государственноголам изобретенийМосква, Ж, Р каэ 5079/1 писное митета СССРткрытийская наб., д.4/5 по1303 Производственно-полиграФическое предприятие, г,ужгород, ул.Проектна Изобретение относится к машиностроению, в частности к захватным головкам манипуляторов.Цель изобретения - расширение технологических возможностей и повышение надежности захвата.На фиг,1 дан захват промышленного робота, общий вид в разрезе; на фиг.2 - вид А на фиг,1. 10Захват промышленного робота крепится на руке манипулятора 1 и содержит корпус 2, выполненный в виде стакана, эластичную тороидальную оболочку 3, закрепленную на стенке стакана 15 держателями...
Модуль промышленного робота

Номер патента: 1348165
Опубликовано: 30.10.1987
МПК: B25J 9/08
Метки: модуль, промышленного, робота
...выдвижения 21 захватного органа 22 имеют описанную конструкцию.Модуль промышленного 40 тает следующим образом.При вращении вала привода 9 движение передается через зубчатые колеса 10, 1 на вал 5, который через шпонку 7 передает вращение на вал 6 в направлении . Привод 12 через зубчатые колеса 13 и 14 передает вра 1"ие на ходовой винт 2, который через шариковую винтовую передачу сообщает движение гайке 4, а вместе с ней и шлицевой гильзе 3 в направлении 1 При этом гильза 3 через шлицевое соединение с втулкой 8 удерживается от поворота самотормозящейся червячной передачей 18, 19. Привод 15 через зубчатые колеса 16, 17, червяк, колесо и шлицевую втулку 8 передает вращение на шлицевую гильзу 3 в направлении , при этом гильза 3, соединенная с...
Привод модуля промышленного робота

Номер патента: 1349999
Опубликовано: 07.11.1987
МПК: B25J 9/14
Метки: модуля, привод, промышленного, робота
...3 управляется, например, с помощью электромагнитов, обмотки которых соединены с контактами программного устройства или путевых включателей (не показаны). женное на чертеже, и перекрывает все магистрали. Поршень и исполнительный орган продолжают движение вправо под действием сил инерции. Во время этого движения штоковая полость силового цилиндра 1 заполняется рабочей средой из емкости 6 через обратный клапан 5, а рабочая среда из поршневой полости вытесняется через обратный клапан 7 в аккумулятор 9,заряжая его. В результате сжатия упругого элемента аккумулятора 9 (газа или пружины) увеличивается давление в поршневой полости и соответственно сопротивление перемещению поршня, что приводит к остановке поршня и связанного с ним...
Схват промышленного робота

Номер патента: 1350002
Опубликовано: 07.11.1987
Авторы: Гайдуков, Пресман, Сатлер, Сосонкин
МПК: B25J 15/00, B25J 15/06
Метки: промышленного, робота, схват
...при вы,;вижении штока 7. На верхней губке 3 закреплены отсекатель 11 с боковыми пластинами 12 и 13 из немагнитного материала, например текстолита, в которых для облегчения выполнены окна В. На нижней губке 4 смонтирована планка 14, на которой с возможностью самоустановки смонтированы на подвесках 15 магниты 16 и демпферы 17, выполненные, например, из поролона. На подвески 15 надеты также тонкие шайбы 18, число и толщина которых могут изменяться в зависимости от требуемой грузоподъемности магнитов. Стсекатель 11 подпружинен относительно планки 14 дополнительно пружиной 19, а величина хода губок регулируется упором 20. Схват работает следующим образом.При разжатых губках схвата поршень 5 находится в крайнем правом положении, магниты...
Захват промышленного робота

Номер патента: 1350003
Опубликовано: 07.11.1987
Авторы: Васильев, Морозов, Трахтенгерц
МПК: B25J 15/00, B25J 19/02
Метки: захват, промышленного, робота
...с определенным усилием сжатия захват переносится рукой робота и фиксируется над объектом, установленным на рабочей позиции После этого захвзт опускается так, что об ьект свобод)ЕО входит внутрь спиральной пружины 2. В этом исходном состоянии сигнал, снимаемый с выхода схемы 11 ср;внения, равен максимальному значеник), так как я выходе срязочувствительного 1 зыпр амителя 12 напряжение равно нулю, Сигнал со схемы 1 сравнения подается на управляез 1,й делитель 9 напряжения. Нз второй вхс д этого делителя подается напряжение с истоцника 8.Ле итс.ь напряжения работает гак, чтомака)мальному сигя у на его управляю щем входе соответствует минимально. апря кение ня вь)ходе, которое подаетсе на катушку 4 индуктизности. При подач напряжения на...
Покрытие многопролетного промышленного здания

Номер патента: 1352014
Опубликовано: 15.11.1987
Авторы: Бычков, Истомин, Куликов
МПК: E04B 7/00
Метки: здания, многопролетного, покрытие, промышленного
...1 ИЗООНджвцо Зг" цис 10 пере. цый разрез, ца фиг. ". - ;с) же с соединением правого скаг,. кровли с нижней плоскостью ноздулзаблрцого тоннеля, попереч)(ый разрез; нафиг. ) - то же, с соедицен(ем ленглската кровли с нижней пся)с(остьювоздухозаборногл тоннеля,; опере чыйразрез.1 о:рытие многопролетнсгл промыпленного здания состоит из крутоук -лоцной кровли 1 ветроотбойных щи-.тов 2, аэрационного фонаря 3, в конструкцию которого входит злздухозаборный тоннель ), образованнь:й гОкрытием фонаря 5 и идклонцьми и ж;(7:, -МИ ПЛОСКОСТЯМИ б, ВЫПОЛНЕ(3 гЬМИ Встворе противоположного ск,та кров.и.шахт (, соединяющих тс)ннель с приточ -ными установками,Система аэрации работде. следующим образом,Приточный аэрационный воздух поступает н помещение Гдс...