G05B 11/00 — Автоматические регуляторы
Устройство для управления сборочным роботом

Номер патента: 1236418
Опубликовано: 07.06.1986
Авторы: Езерницкий, Лавров
МПК: G05B 11/00
...третьим входам привода 4 и коммутатора 8 Вклюцаются соответствеццо реверс приводы 4 и правление приводом 4от генератора 6 через коммутатор 8.Поскольку ца привод 4 импульсы уцравлеция поступают цепосредствеццо с гецсратора 6 без лелсция частоты, возврац)ециеробота В исходцос состояцие производитсяускорсццо,При Возврацсеции росбспа В исходцсхс состояцие срабагывас т датчик 2, и сигцал с с го50ВЫХОДЫ ЦОСТ 1 ЦЫСЦЕ 1 .ООТВЕТСТВ 101 С С ВХОЛЫтриггеров 3 и 9 и приводит их в исходцое состояцие. Сл)с)тве)ствеццо привод 4 и коммутагОр 8 привод)гс)1 В исходцое состояпис. 1 и,1повторяется с приходом цового изделия 17. При отсутствии заготовок 15 в накопителе 14 или задержке устацовки заготовки 15 ца время, большее времени нахождения изделия 17 в...
Система автоматического регулирования параметров воздуха
Номер патента: 1239682
Опубликовано: 23.06.1986
Автор: Петров
МПК: G05B 11/00
Метки: воздуха, параметров
...хорошие датчики для измерения температурыи относи тельттой влажности цт.Оптимальные режимы в предлагаемой системе структуры определяются .г.огическим устройством, которым является плата с токопрояодящими пластинами и скользящим контактом. При любом уходе параметров воздуха предлагаемгая система регулирования включает лишь те испольцительные устройства, которые непосредственно проводят параметры воздуха в заданную область, я то Время кяк в известных системах кондиционирования параметры воздуха доводятся по влажности доточки росы, гтэсле чего производится ; подогрев Воздуха до заданной температуры,Таким образом, тт известных системах кондициотплрояания энергия наподогрев тоздуха тратится даже тогда, когда параметры воздуха по...
Самонастраивающийся электропривод

Номер патента: 1247831
Опубликовано: 30.07.1986
Авторы: Васильев, Суляев, Филаретов
МПК: G05B 11/00
Метки: самонастраивающийся, электропривод
...цикла.Момент М а, развиваемый двигателем (при отсутствии на выходном валувнешнего и шарнирного моментов), определяется выражением20 М =хК =1 ДС)+/М, /здпЫ(1)+К Ы(1)где,1 - суммарный момент инерциивсех вращающихся частей привода,приведенный к валу ре дуктора.Из выражения (1)легко получить;2 с=К ( 1- -- зцпс- -- сс) ( 2)/М / . ККэа иПосле интегрирования левой и правой частей уравнения (2) будем иметь: 2 З=К - ( - -" - нпс(- - ф - м ) й(3)35Из выражении з 1 видно, что егоправая часть точно совпадает с сигналом, получаемым на выходе интегратора 8,Для получения сигнала, равного1, необходимо сигнал с выхода интегратора 8 поделить наЫ(З), что и делается в делителе 9,на выходе которого Формируется сигнал, соответствующий величине ).Передаточная...
Устройство для управления дистанционным манипулятором

Номер патента: 1252163
Опубликовано: 23.08.1986
Авторы: Березкин, Гудков, Левшин, Суслов
МПК: B25J 11/00, G05B 11/00
Метки: дистанционным, манипулятором
...т В ПОГОж(1 Ит;. В:КЛ,(Л 1 Ч1) в положение. ).,1,хтет-. (,".,т,тт:ттсгсО)ГДД В -Оти РЕ)ПВ ЦЕТ 1 Я( Я( злектропринод2 Огключен, Р Во, - ДЕЙСТВИИ ОПЕра ОГд т.,о СТО; ОНЫ "-,я д и(Гр Оц т ".т т , туг)х т) .)З 5 СИГНДЛ С. ДДТЧЬха О КОМЕ)-тдт ПРОПОРЦИОНДЛЬНЬтй ДЕ(РОРМ(т;т-.т тПВ --ОЗЕ,"ЕНТ Д ), ПОСТтДЕТ т,а т, ЕРВ т З ОптЕРВОГО Су Мдтора 1 гд 1","ООГ;егоВХОД ГОСТУЕТ СИГта т С Д)ГГКЯ 5ДаВЛЕНИЯ тРОЦО)ИОНЯГЬКЫй МОЬЕтт тНЯ РУ" К 1 НДСЦО;1 т, Цт.ттг)т: Лт; , ., г.Оигндл с Выхода Ррво с с,ььято)11 7проорсиоцгльный рдз( Стц )О) ен гос."ПЛСГУЦаЕ ЧЕРЕЗ ПОСЛ(тт О" Я" тпт.,ттт; С,диненньп злектрогидраус 1)пц 11; 11На ГИДРОЦРЦВОД3 В ОЛОС:ЯХ (От); -РОГО т;.ОЗДЯЕТСЯ ПЕРЕГ ап автЕНИй т (Сттоттьт вызьтвРОтент,. Рц,т) - ,-.,1 рВДЛа -1 ДРОДВИГаТЕЦЯ 1, ....
Система управления

Номер патента: 1252752
Опубликовано: 23.08.1986
Авторы: Гуляев, Дорух, Ермоленко
МПК: G05B 11/00
...( Е С О), тоЬР)тт)РУЕТСЯ СИГНаЛ На ПЕРВОМ ВЫХОДЕ,)гпифртора 14, которым устандвливаетс энлчение К, равное К причемК ) К. Значс.ния коэффициентов Ки, К, д такте епичиц сс, ) 8 дт ) )1Д ) г ТВ Э Я В И С. И ."1 О С Ч И О 1 С В 0 й С Т В20 гС 1 ктд управц ция и требований к сис".Сме.Лтт тема управления реализуется наи зцестцых схс )Итх решециях, Лроторциоцлптпй регуляторре 2 сд)ти зус тся по гхеме угилителя с программируемым коэффициентом усиления,иц Гегратор 8 - по схеме интегратора. бросом, блоки 13 и5 контролязцдкд - путем последовательного сое 30 п 1 цеция комтараторя с нулевым поро);м г.рдбятывяция и логического элемИглд И Ворой вход которого явля Г упрдтзлюшим вхсдом блока, блок 12 коц Гропт моду:тя - путем последозгт льного...
Устройство для управления манипулятором

Номер патента: 1257606
Опубликовано: 15.09.1986
Авторы: Герасун, Пындак, Рогачев, Строков, Юдин
МПК: G05B 11/00
Метки: манипулятором
...1 и соответственно к смещению золотника гидроэлектрораспределителя 2 относительно нейтрального положения. В этом случае одна из полостей гидроцилиндра 3 оказывается соединенной с напорной, а противоположная - со сливной магистралямиэлектрогидрораспределителя 2, штокгидроцилиндра 3 начинает перемещаться, обеспечивая отслеживание стрелой исполнительного органа 6 положения задающего органа 5, Скорость отслеживания зависит от величины рассогласования положения датчиков 916 на задающем и исполнительном органах 5 и 6. Чем больше величина этого рассогласования, тем сильнее изменяется напряжение на выходе соединителя 8, тем сильнее смещается золотникраспределителя 2, увеличивая расходрабочей жидкости, поступающей к гидроцилиндру 3 для изменения...
Адаптивная система управления

Номер патента: 1257607
Опубликовано: 15.09.1986
Автор: Меняйленко
МПК: G05B 11/00
Метки: адаптивная
...порогового элемента 31 появится сигнал, равный единице.После умножения этого единичного сигнала в умножителе 28 на разностный сигнал от элемента 20 сравнения этот сигнал усиливается усилителем 32 и подается на вход сумматора 33, где он суммируется с выходным сигналом дискретного элемента 34 задержки.Однако на выходе элемента 34 задержки этот сигнал появится с задержкой на 1 шаг.Таким образом, в зависимости от соотношения величин квадратов разностного сигнала рассогласования между поступившим дискретным сигналом от датчика 2 возмущающего воздействия и выходными сигналами с дискретных элементов 27 и 34 задержки, разностный сигнал с выходов элементов 19 и 20 сравнения поступает на соответствующие входы дискретных элементов задержки...
Устройство для управления электроприводом робота

Номер патента: 1257608
Опубликовано: 15.09.1986
Авторы: Горбачев, Жаров, Кузнецов, Пашкевич, Фурман
МПК: G05B 11/00
Метки: робота, электроприводом
...разгона Г и путем торможения Х. При этом частота генератора 17 импульсов выбирается из условия, чтобы при Т =Треверсивоакный счетчик 20 заполнился до значения оптимального пути торможенияпри Т"ск 15Моменту окончания разгона будутсоответствовать следующие значениявыходных сигналов шифратора 12,О, ==О, 0=0, 0.=1, что соответствуетподаче с выхода блока 11 через элемент И 9 на второй вход блока 2 кода Х.ЗАооВторой ключ 7 открыт. Таким образом, двигатель 4 работает в режиме стабилизации скорости. 25В момент окончания равномерногодвижения блок 21 совпадения фиксирует выполнение равенства Х -Х = Хи импульс положительной полярностипоступает на вход второго триггера 2330переводя его в состояние "1". В соот Ф о р м у л а и з о б р е т е н и я...
Устройство для управления приводом

Номер патента: 1257609
Опубликовано: 15.09.1986
МПК: G05B 11/00
Метки: приводом
...положения, элемент НЕ б,первый ключ 7, второй усилитель 8,второй сумматор 9, второй ключ 10,релейный элемент 11, датчик 12 токаи дифференциатор 13,Устройство работает следующимобразом.При неподвижном положении вала,электродвигателя 3 первый ключзамкнут, а второй ключ 10 разомкнут.В результате контур отработки токаэлектродвигателя 3 является замкнутым, а с выхода релейного элемента11, имеющего в начале координат нулевую (нейтральную) точку, на второйвход второго сумматора 9 поступаетнулевой сигнал.При неподвижном положении исполнительного электродвигателя 3 токв его обмотках прямо пропорционаленвеличине развиваемого электродвигателем момента. В результате для преодоления момента, обусловленногосухим трением, ток в обмотках...
Устройство для управления копирующим манипулятором

Номер патента: 1262447
Опубликовано: 07.10.1986
Авторы: Егоров, Новикова, Рябов
МПК: G05B 11/00
Метки: копирующим, манипулятором
...и "0"при несовпадающих знаках моментов,который поступает на первый входэлемента ИЛИ-НЕ 10, если при этом скорость задающего вала меньше порогового значения, соответствующего быстрым перемещениям, то на второй вход элемента ИЛИ-НЕ 10 поступает 5 сигнал логического 0" с порогового элемента 17, величина скорости измеряется датчиком 8 скорости. Одновременное обнуление входов элемента ИЛИНЕ 10 вызывает его срабатывание и с его выхода на вход первого коммутатора 21 поступает сигнал логической "1", при этом первый коммутатор 21 подключает вход второго коммутатора 22 к выходу сумматора 20, одновре менно происходит оценка величины нагрузочного и задающего моментов путем сравнения знаков нагрузочного момента - сигнал с блока 16 и знака...
Устройство для управления промышленным роботом

Номер патента: 1264137
Опубликовано: 15.10.1986
Авторы: Егоров, Кобзев, Мишулин, Рассказчиков
МПК: G05B 11/00
Метки: промышленным, роботом
...усиленный усилителем 5 на первый вход коммутатора 7, а с его выхода -- на вход сумматора 4, где из него вычитается сигнал датчика 12 скорости. Полученный сигнал, усиленный усилителем 6, подается на привод 10 исполнительного механизма 11. Сигнал с датчика 14 контакта переключает в момент контакта шлифовального круга с поверхностью детали коммутатор 7 с контура управления по положению на контур управления по усилию. С данного момента сигнал с задатчика 2 усилия (резания), вычитая сигнал с датчика 15 в сумматоре 8, подается на входы вентилей 16 и 17, а с них - на первый и второй 45 входы второго коммутатора 19. Вентили 16 и 17 имеют различную проводимость (т, е. включены встречно), поэтому коммутатор 19 подключает к входу усилителя 9...
Устройство для управления электроприводом промышленного робота

Номер патента: 1265691
Опубликовано: 23.10.1986
МПК: G05B 11/00
Метки: промышленного, робота, электроприводом
...от технологических требований к электроприводу.Если по технологическим условиямтребуется поддержать постоянным ускорение двигателя 5 в режиме разгона,когда регулятор 2 скорости находится Бв насыщении и статический момент пре-вышает номинальный,на ЛМ , то на выходе третьего нелинейного блока 18 появляется постоянное напряжение, оторое приводит к изменению уровня траничения напряжения на выходе регулятора 2 скорости за счет суммирования сигнала ограничителя 12, со- ответствующего М и сигнала нелинейного блока 18, соответствующего (+ЬМс). При этом возрастает ток якоря двигателя 5, следовательно, и вращающий момент М(й), на величину (йМ), компенсируя увеличение статической нагрузки. Ускорение электромеханической системы согласно (1)...
Устройство для контроля манипулятора

Номер патента: 1275364
Опубликовано: 07.12.1986
Автор: Ермошкин
МПК: B25J 13/00, G05B 11/00
Метки: манипулятора
...импульсный сигнал на очередном из Б выходов, т.е. при последовательном поступлении М входных импульсов от генератора 1 производить поочередное формирование импульсных сигналов на каждом из выходов. К+1 состояние распределителя 3 используется как исходное.Команды, выдаваемые распределителем 3, служат для снятия блокировок экрано-съемного устройства, что необходимо при имитации производства рентгеновских снимков, а также для имитации команд, поступающих от остальной части рентгеновского аппарата. Интервалы между командами и цикл команд выбираются по циклограмме работы манипуляторов.В устройстве запоминание сигналов остановок манипуляторов происходит на ключах 4-6 и повторный запуск распределителя 3 происходит при возврате их на...
Двухдвигательный следящий привод

Номер патента: 1275366
Опубликовано: 07.12.1986
МПК: G05B 11/00
Метки: двухдвигательный, привод, следящий
...Выход усилителя 15 запитывает потенциометр задатчика 1Таккак содержание блока 16 памяти неизменно, то и сумма координат Х 1 + Х 2постоянна вследствие действия отрицательной обратной связи через блок 4012 настройки,Таким образом, каждый канал 2 и 3 управления отрабатывает управляющие сигналы с выхода эадатчика 1, и сумма координат Х 1 + Х 2 = Б неизменна.В оеальных условиях каждый канал 2 и 3 управления дает ошибку в координатах Х 1 и Х 2, Так как оба канала 12 и 3 одинаковы, то ошибки управления однонаправленны. При этом сумма коор- динат Х 1 + Х 2 будет в той или иной степени отличаться от общей суммарной координаты, в пределах которой отрабатывается управление, Сумматор 13 просуммирует реальную сумму координат Х 1 + Х 2, а...
Устройство для управления исполнительным механизмом манипулятора

Номер патента: 1282077
Опубликовано: 07.01.1987
Авторы: Ежов, Жавнер, Зинкевич
МПК: G05B 11/00
Метки: исполнительным, манипулятора, механизмом
...выхода синусно-косинусного преобразователя 7 поступает на первые входы синуснокосинусных преобразователей 6 и 5, с выходов которых сигналы, пропорциональные У впас сова и - У япа впа соответственнно, поступают на приводы 3 и 2. Таким образом обеспечивается движение вдоль оси У,При движении исполнительного механизма вдоль оси Л сигналы с задатчика 1, пропорциональные перемещениям вдоль осей Х и У и равные нулю, поступают на входы синусно-косинусного преобразователя 7. Сигнал, пропорциональный перемещению вдоль оси 2 поступает на вторые входы синусно-косинусных преобразователей 5 и 6, на первые входы которых поступает нулевой сигнал свторого выхода синусно-косинус- ного преобразователя 7. Нулевой сигнал с первого выхода синусно-косинусного...
Обратимая следящая система

Номер патента: 1282078
Опубликовано: 07.01.1987
МПК: B25J 13/00, G05B 11/00
...28 производит опускание У до оси я, т, е. вычитание из длительности Ублока 12 длительности 35 сигнала одновибратора 24 (запускаемого от первого чувствительного элемента 3). На выходе блока 29 каждый четвертый импульс У обозначенный И 1, поэтому крутизна пилообразногс закона И 1. (а) в четыре меньше, чем И. (сс). Импульсы И 1 п через блок 33 поступают на сумматор 22, где вырабатывается сигнал рассогласования между сторонами 1 и 2. На участке 0 - 90 блоки 30 - 32 закрыты и не пропускают сигнал И 1 для запуска одновибраторов 25 - 27. На участке 90 - 180 открыт блок 30, одно- вибратор 25 выдает импульс, равный максимальной длительности И 1, который суммируется по длительности в блоке 33. На участке 180 - 270 открыт блок 31, работает...
Система управления
Номер патента: 1285427
Опубликовано: 23.01.1987
Авторы: Новогранов, Степанов
МПК: G05B 11/00
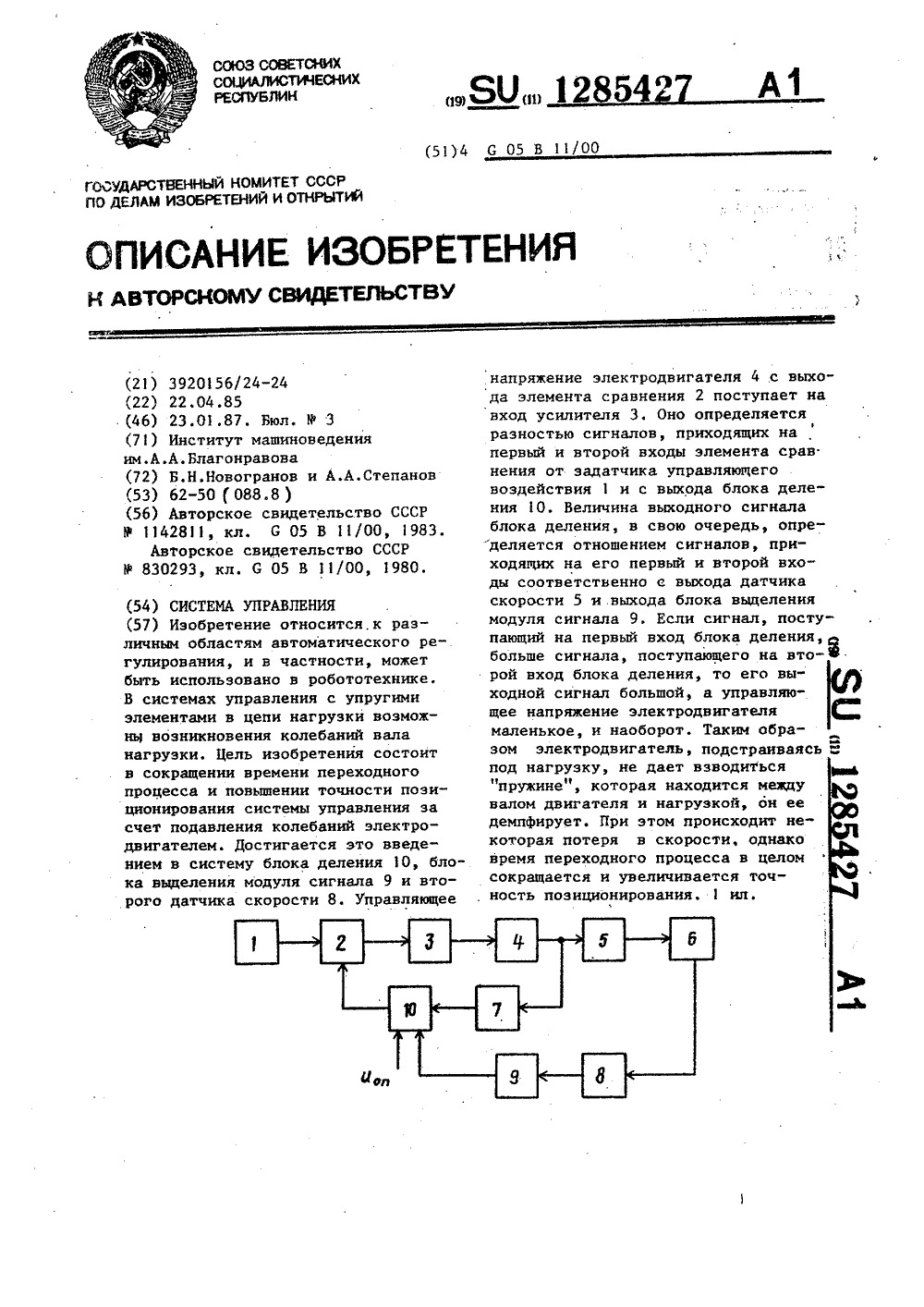
...Цель изобретения - сокращениевремени переходного процесса н повышение точности позиционирования системы.На чертеже приведена блок-схема Опредлагаемой системы управления.Система содержит задатчик 1 управляющего воздействия, элемент 2 сравнения по скорости, усилительэлектродвигатель 4, редуктор 5, объет 6 регулирования, первый датчик 7скорости, второй датчик 8 скорости,блок 9 выделения модуля сигнала иблок 10 деления.При проектировании системы принято,что редуктор абсолютно жесткий, авал двигателя связан с нагрузкойчерез "пружину", жесткость которойсоответствует жесткости реальногоредуктора,25Система работает следуизцим образом,Задатчик 1 управляющего воздействия вырабатывает управляющий сигналР, который поступает на первый...
Устройство для управления манипулятором

Номер патента: 1290247
Опубликовано: 15.02.1987
МПК: G05B 11/00
Метки: манипулятором
...и второй коммутаторы 5 и 6. Теперь система замкнутапо усилию. Положительный сигнал задания по усилию, поступающий от эадатчика 2 усилия, переключается блоком10 умножения в зависимости от знакасигнала ошибки рассогласования по положению, поступающего через усилитель-ограничитель 8 и блок 9, чем 50обеспечивается совпадение полярностисигнала задания по усилию, поступающего на привод 15, с требуемым направлением перемещения. Сигнал ошибкирассогласования по усилию, являющийся разностью сигнала, поступающегона положительный вход второго сумматора 4, и сигнала, поступающего сдатчика 13 усилия через второй коммутатор 6 на отрицательный вход второго сумматора 4, поступает через первый коммутатор 5 на привод 15 через исполнительный механизм 16,...
Пропорционально-интегральный регулятор

Номер патента: 1320792
Опубликовано: 30.06.1987
Авторы: Вольберг, Демидов, Казанский, Мучник, Рубашкин
МПК: G05B 11/00
Метки: пропорционально-интегральный, регулятор
...торможение приобретаетинтенсивный характер,В один из моментов времени С регу-.лируемый параметр частоты вращенияэлектродвигателя достигает заданнойвеличины, что немедленно фиксируетсигнал пропорциональной составлявшей,изменяя свой знак на знак, соответ 25 ствующий знаку сигнала задания. Вэтот момент времени получается (естественным образом) совершенно неправильная ситуация работы регулятора,Параметр в норме, пропорциональная30 составляющая это.идентифицирует, аинтегральная составляющая Б(1;) в силу инерционности рырабатывает сигналс обратным знаком управления, не соответствующим по направлению требуемому воздействию.Для ликвидации несоответствия иулучшения динамических характеристиксигналы свыхода шин 6 знаков пропорциональной...
Устройство для регулирования процесса улавливания и накопления органического слоя в емкости с сифоном

Номер патента: 1327055
Опубликовано: 30.07.1987
Авторы: Гамза, Капустин, Кацюба, Краснорудский, Потапенко, Тришкин, Цинкуш
МПК: G05B 11/00, G05D 27/00
Метки: емкости, накопления, органического, процесса, сифоном, слоя, улавливания
...поступающего в отрицательную камеру элемента 9 сравнения, становится бопьше целичицы давления в пцевмоемкости 39, что вызывает переключение элемента 9 сравнения, на его выходе появляется дис.кретцый сигнал 0, который через усилитель в повторитель 27 открывает исполнительный механизм 28. Регулируемым дросселем 37 устанавливается время расслоения жидкости в емкости 1 (в конкретном примере - 3 миц). Происходит подслив тяжелой Фазы до уровня гидрозатвора 3. Время подслива устанавливается регулируемым дросселем узла 21 и для конкретного случая оно равномин. По мере падения давления в пцевмоемкости узла 21 и, соответственно, в минусовой камере реле 20 до величины, меньшей подпора задатчцка 26, происходит переключение реле 20, на выходе...
Цифровой регулятор

Номер патента: 1335926
Опубликовано: 07.09.1987
Авторы: Барышников, Зверев, Харитонов
МПК: G05B 11/00
...за счет выбора коэффициента К:, определяющего постоянную времени регулирования. Оперативное запоминающее устройство 16 используется для хранения промежуточных результатов. Перед запус 35 ком вычислительного блока 3 в регистр 18 с блока 4 задания кода уставки заносится код уставки Рт по сигналу готовности. Работа вычислитель ного блока начинается с подачи сигнала запуска с блока, по которому запускается тактовый генератор 10, а счетчик 11 обнуляется.По тактовой последовательности Т 145 изменяет свое состояние счетчик 11, а по сигналам Т 2 и по коду адреса на выходе счетчика 11 извлекается соответствующая микрокоманда из постоянного запоминающего устройства 12. Алгоритм работы вычислительного блока приведен на фиг, 3. Но сигналу запуска...
Система автоматического регулирования

Номер патента: 1341616
Опубликовано: 30.09.1987
Авторы: Агаджанян, Александрян, Бадалян
МПК: G05B 11/00
...постоянной величиной 1 и модулем ошибки б;= с-Е, Релейный элемент 12 осуществляет анализ знака величиныЕсли 17 О, т,е, 1 ( Г то ключом 7 на вход интегратора 5 подается формируемый на выходе второго блока 10 умножения информационный сигнал,равный произведению ошибки регулирования на величину, Если 1С,т,е,11 с, то ключом 7 на входе интегратора 5 сигнал обнуляется, т.е,10Управляющий информационный сигнал,определяемый выражением Б = К 2 Й++КЕ 1 с выхода первого сумматора 6поступает на вход исполнительногоблока 2, который представляет собсйпропорциональное или апериодическоезвено.Значения коэффициентов К, Ка также величина с" выбираются в зависимости от свойств объекта 1 регулирования и требований к системе,В частности, коэффициен"...
Устройство формирования управляющего сигнала следящего привода
Номер патента: 1348768
Опубликовано: 30.10.1987
МПК: G05B 11/00
Метки: привода, сигнала, следящего, управляющего, формирования
...процесса (9). 25 30 35 40 45 С выхода блока 1 на вход блока 2 и на сумматор 7 поступает сигнал, равный произведению Я С, с выхода блока 2 на сумматор 7 поступает сигнал, равный произведению (6 Е) С= Я ; с выхода блока 3 на сум 2.матор 7 поступает сигнал й й. С выхода блока 4 на сумматоры 7 и 8 поступает сигнал, равный Гдс -Я(ос выхода блока, 5 на пает сигнал, равный Я(е - с,) + й(с-е,) . Все сигналы, поступающие на сумматор 7, сгруппированы таким образом, что сигналы, которые должны складываться согласно основным аналитическим выражениям, подаются на прямой вход (+) усилителя 6, а сигналы, которые должны вычитаться, подаются на инверсный вход (-) усилителя 6После выведения нагрузки следящего привода в точку с заданными фазовыми...
Следящая система

Номер патента: 1368855
Опубликовано: 23.01.1988
Авторы: Галахов, Максаев, Петухов, Тимашов
МПК: G05B 11/00
Метки: следящая
...якорь которого перемещается и замыкает с помощью механической муфты 14 сцепления кинематическую цепь от вала электродвигателя 7 до движка второго датчика 11 положения.Таким образом, на входы второгосумматора 5 поступают сигналы с первого 9 и второго 11 датчиков положения,равные по величине, но противоположные по знаку, вследствие чегорассогласование на выходе второго 26 сумматора 5 в этом режиме всегдабудет равно нулю. Перемещая рукоятку2 управления, оператор тем самым задает величину управляющего напряжения на входе усилителя 6, соответствующую требуемому значению угловойскорости выходного вала электродвигателя 7. Угловая скорость измеряетсядатчиком 8 скорости и при отклонениискорости выходного вала нагрузки отзаданного значения на...
Устройство уменьшения влияния узкополосной помехи на фазоманипулированный сигнал

Номер патента: 1377824
Опубликовано: 28.02.1988
МПК: G05B 11/00
Метки: влияния, помехи, сигнал, узкополосной, уменьшения, фазоманипулированный
...помехи на Фазоманипулированный сигнал работает следующим образом.Во все периоды изменения несущей Б, (фиг. 2 б) ее среднее значение равно кулю и только в интервале изменения Фазы, когда имеется код передаваемого сигнала (фиг, 2 а), это среднее значение не равно нулю и имеет значение А равное площадиозаштрихованного прямоугольника фазоманипулированного сигнала (ФМС) (фиг. 2 б). Исполнительные элементы приемного устройства (не показан) в конечном итоге реагируют на эти на копленные сигналы и формируют элементы дискретного кода О, 1, О, Принимаем зону В ограничения ограничителя такой, чтобы ФМС 11 не подвергался ограничению (Фиг. 2 б).При наложении на полезный ФМС преднамеренной помехи Б (фиг. 2 в) эта помеха искажает ФМС Б до вида...
Следящая система

Номер патента: 1383286
Опубликовано: 23.03.1988
Авторы: Пономарев, Соколов, Тимашов
МПК: G05B 11/00
Метки: следящая
...1) поро 1гового устройства соответствует большая величина напряжения на выходе цифроаналогового преобразователя 10, приходящаяся на единицу младшего разряда реверсивного счетчика 9,Система работает следующим образом.Сигнал О с выхода блока 2 выделения ошибки, прохоця через сумматор 3, попадает на вход усилителя 4, где усиливается до значений, необходимых для управления исполнительным элементом 5.25 Одновременно сигнал с выхода блока 2 выделения ошибки поступает навход канала коррекции, состоящегоиз и параллельных аналогичных кана 5лов. Сигналы всех и каналов суммируются на сумматоре 3.Предположим, что в процессе слежения ошибка системы достигает некоторой величины П,. При этом напряжение на выходе корректирующего усилителя 6...
Следящая система

Номер патента: 1401436
Опубликовано: 07.06.1988
Автор: Смирнов
МПК: G05B 11/00
Метки: следящая
...скоростной ошибки 6 масштабным блоком 10 и подается на третий (неинвертирующий) вход сумматора 3, Под действием такого дополнительного компенсирующего сигнала отрабатывающая ось следящей системы следит за задающей без скоростной ошибки 0 ,Системы, использующие жесткие тахометрические связи, имеют малую добротность по скорости (К =100-200 1/с)) но обладают достаточно широкой полосой пропускания, а следовательно, и высокой добротностью по ускорению (К 10000 1/с) . Ошибка по ускорению О следящей системы мала ло сравнению с ошибкой по скорости 9 и моментной ошибкой 6 , поэтому в известной системе за счет применения дополнительного компенсатора устраняется ошибка по скорости Я, а ошибка системы 6., как следует из выражения (1), определяется...
Устройство для управления приводом робота

Номер патента: 1405023
Опубликовано: 23.06.1988
Автор: Филаретов
МПК: G05B 11/00
...виде25(Ь (Ы БЙ + К ). +/Мз 18 пог . (6) 11 ( э 1 э30 С учетом только линейных составляющих выражения (6) имееми без учета взаимовлияния и вязкоготрения описывается передаточной функцией вида1405023 6обходимо, чтобы он всегда описывался только выражением вида (9) независимо от значения М , Для этого в прямую цепь реальной системы, описываемой передаточной функцией (8), достаточно ввести последовательное корректирующее звено вида(з1 ) ( 1 р)К К +К (Ь +Квс Кя(Ь +12,П(Р) == - =- "(О)У К КК,К+К Ь+ККмКя1Из выражений (2) и (10) видно, что 15 С учетом равенства (11) соотношепараметры корректирующего устройства ние (4) может быть представлено в П (Р) (Ь Н ) необходимо непрерывно видеподстраивать под их текущие значениятак как Н=Н (8, ш), а Ь =Ь...
Система автоматического регулирования

Номер патента: 1411703
Опубликовано: 23.07.1988
МПК: G05B 11/00
...ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д, 4/5Подписное Производственно-полиграфическое предприятие, г, Ужгород, ул, Проектная, 4 Изобретение относится к областисистем автоматического регулирования.Цель изобретения - повышение качества управления,На чертеже приведена блок-схемасистемы.Система содержит элементсравнения, первый 2 и второй 3 усилители,блок 4 умножения, сумматор 5, объект6 регулирования, первый 7 и второй 8дифференцирующие блоки, ключ 9, пороговый элемент 10 с регулируемым порогом срабатывания, вход 11 и выход 12.Система работает следующим образом.При наличии значительной величинысигнала рассогласования на выходеэлемента 1 сравнения при отработке,апример,...
Автоколебательная система регулирования

Номер патента: 1418646
Опубликовано: 23.08.1988
МПК: G05B 11/00
Метки: автоколебательная
...является повьппение точности регулирования при изменении параметров объекта.На чертеже изображена структурнаясхема автоколебательной системы регу, лирования температуры,Система содержит объект 1 управления, первый 2 и второй 3 фильтры,релейный элемент 4, детектор 5, вычислитель 6 постоянной времени фильтра, вычитатель 7, первое 8 и второе 9.устройства дистанционной передачи.Объект 1 управления описываетсяпередаточной функцией вида 1- (ф Р )( Р ) (3 Цфф" И(р)-(Тф р+) (Т,р+1)Каждый из Фильтров 2 и 3 имеет п одному дистанционно изменяемому эле менту настройки, характеризуемому параметром Тф,. Параметр элементов настройки Тф, фильтров 2 и 3 связан с коэффициентом усиления объекта Ко следующим соотношением: т -ь тск,-1, (4) ,где...