Пропорционально-интегральный регулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК 0 4 С 05 В 11 САНИЕ ИЗОБРЕТЕ У 24торское бю идетепьство СССР 05 В 11/00, 1977 идетельство СССР С 05 В 11/00, 198 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(57) Пропорционально-интегральный регулятор относится к технике автоматического управления и регулирования.Целью изобретения является повышениеточности и быстродействия. Поставленная цель достигается тем, что врегулятор введена цепь коррекции,состоящая из двух элементов НЕРАВНОЗНАЧНОСТЬ и элемента совпадения, позволяющая осуществлять сброс интегральной составляющей на основе анализазнаков сигналов пропорциональной иинтегральной составляющей, 1 ил.1 13207Изобретение относится к автоматическому управлению и регулированию и может быть использовано для управ 1 ления электрическим напряжением, током, температурой, скоростью вращения электродвигателя и другими физическими и технологическими параметрами при решении различных технических задач.Цель изобретения - повышение точ ности и быстродействия.На чертеже изображена блок-схема предлагаемого регулятора.Пропорционально-интегральный регулятор 1 содержит блок 2 вычитания, 15 интегратор 3, имеющий вход 4 "Установка", сумматор 5, выходные шины знака 6 и модуля 7 блока вычитания, первый 8 и второй 9 элементы НЕРАВНОЗНАЧНОСТЬ, элемент 10 совпадения, 20 выходные шины знака 11 и модуля 12 интегратора, входные шины знака 13 и модуля 14 первого входа пропорционально-интегрального регулятора, выходные шины знака 15 и модуля 16 пропорционально-интегрального регулятора, объект 17 регулирования, входные шины знака 18 и модуля 19 второго входа пропорционально-интегрально-. го"регулятора, блок 20 управления, З 0 состоящий, например, из генератора 21 тактовых импульсов и распределителя импульсов 22, имеющего выходы 23-25. Интегратор 3 может быть реализован в виде любого известного цифрового параллельного сумматора-накопителя с цифровыми входами (шины 6 и 7) и цифровым выходом (шины 11 и 12) на интегральных схемах, например, серии 40 К 555, К 531, К 155,Блок 2 может быть реализован в виде любого известного цифрового параллельного реверсивного сумматора с двумя цифровыми входами (шины 13, 14 и 18, 19) на интегральных схемах, например К 155 ИМЗ. 92 2Предположим, что на выход регулятора 1 в момент дискретного времениподается входной сигнал Ч (;), который по шинам 13 и 14 поступает на первый вход (уменьшаемого) блока 2. На второй вход вычитаемого блока 2 по шинам 18 и 19 поступает сигнал У обратной связи, Этого сигнал блока 2 вычитается из входных сигналов задания, в результате чего на его выходе на шинах 6 и 7 образуется разностный сигнал рассогласования йУ(й) = Ч(С, )-У(Е;) . Этот сигнал по шинам 6 и 7 подается на вход цифрового параллельного сумматора-накопителя (интегратора) 3 и на вход цифрового параллельного сумматора 5.Генератор 21 импульсов вырабатывает импульсы с частотой Р, которые поступают на вход распределителя 22 импульсов. Последний циклически на своих выходах 23-25 вырабатывает последовательно по выходам тактовые импульсы стробирования, При этом первый импульс с выхода 23 стробирует цифровой параллельный сумматор- накопитель (интегратор 3), второй импульс с выхода 24 стробирует элемент 10, третий импульс с выхода 25 стробирует сумматор 5, формируя в момент строба на его выходе суммарный сигнал управления Б, При подаче каждого стробирующего импульса п-разрядное число 6 у(,) на входе 6 и 7 цифрового параллельного сумматора- накопителя суммируется с его содержимым. В результате при непрерывном поступлении стробирующих импульсов в цифровом сумматоре-накопителе 3 образуется сумма числовых значений входного сигналаСумматор 5 может быть реализован в виде Йзвестного цифрового параллельного сумматора с двумя цифровыми вхо 50 дами (шины 6, 7 и 11,12) и цифровым выходом (шины 15 и 16) на интегральных схемах К 155 ИМЗ.Элементы 8 и 9 реализованы на микросхеме К 155 ЛП 5. Элемент 10 может быть реализован на микросхеме К 155 ЛИ 1Устройство работает следующим образом,где С - начальное число в блоке 3;К - коэффициентв данном случае определяемый частотой стробирования, относительнымсдвигом разрядов параллельных чисел,формируемых на параллельных шинах 7модуля сигнала Ь У(; ) при подключении к параллельному входу сумматоранакопителя,Если С = О, то сумма будет иметьвид:1320792 4знак на противоположный знаку сигналазадания. Например, при знаке сигналазадания "+" (сигнал "0" на шине 13)П(е;) имеет "-" (сигнал "1" на шине6), а при знаке сигнала задания(сигнал "О" на шине 6).При динамических изменениях, например, связанных с уменьшением нагрузки или с торможением, пропорциональная составляющая П(С ) изменяет знак1на обратный на более длительный период При более глубоком торможениидлительное изменение знака П(Т;) приводит к изменению знака и интегральнойсоставляющей сигнала управления, Ц(г)В результате торможение приобретаетинтенсивный характер,В один из моментов времени С регу-.лируемый параметр частоты вращенияэлектродвигателя достигает заданнойвеличины, что немедленно фиксируетсигнал пропорциональной составлявшей,изменяя свой знак на знак, соответ 25 ствующий знаку сигнала задания. Вэтот момент времени получается (естественным образом) совершенно неправильная ситуация работы регулятора,Параметр в норме, пропорциональная30 составляющая это.идентифицирует, аинтегральная составляющая Б(1;) в силу инерционности рырабатывает сигналс обратным знаком управления, не соответствующим по направлению требуемому воздействию.Для ликвидации несоответствия иулучшения динамических характеристиксигналы свыхода шин 6 знаков пропорциональной составляющей и шин 11знаков интегральной составляющей поступают на входы элемента 8, которыйна своем выходе образует логическуюфункцию 6 Г 1 Ч 6 11, фиксируя несоответствие знака сигнала результата интегрирования со знаком сигнала результата вычитания. 3:К дК(,).,:оЭта сумма является дискретной реализацией интеграла входного сигнала5ка 1-огде 7 - время в непрерывном отсчете.По шинам 11 и 12 с выхода цифрово О го параллельного сумматора-.накопителя. (блок 3) сигналы поступают на входы первого слагаемого цифрового сумматора 5, на входы второго слагаемого которого по шинам 6 и 7 подаются сигна лы с выхода цифрового блока 2 вычитания сигналов обратной связи. Сумматор 5 алгебраически (с учетом знака слагаемых) суммирует результат интегрирования с результатом вычитания и на шинах 15 и 16 его выхода образуется пропорционально-интегральный сигнал управления;:оПри этом пропорциональная составляющая сигнала управления Интегральная составляющая сигналауправления ПИ;) = ККОИ; )Ф,;-.ОКоэффициенты К, К 1, К определяются и задаются конкретной техической реализацией устройства.Сигнал управления Я по шинам 4 О 15 и 16 подается на вход объекта 17 управления.При работе в статическом режиме, например по поддержанию скорости вращения электродвигателя, интегральная составляющая У(1; ) имеет знак, соответствующий знаку сигнала задания, Например, при знаке сигнала задания"+н (сигнал "Он на шине 13) У(п) имеет "+" (сигнал "О" на шине 11), а при знаке сигнала задания "-" (сигнал " 1" на шине 13) имеет "-" (сигнал " 1" на шине 11). При этом по абсолютному значению сигнал результата интегрирования имеет относительные изменения достаточно плавного характера.Пропорциональная составляющая П при перерегулировании изменяет . Сигналы с выхода шин 13 знаков сигнала задания и шин 11 знаков интегральной составляющей поступают на входы элемента 9, который на своем выходе образует логическую функцию 13 11 Ч 13 11, фиксируя несоответствие знака сигнала результата интегрирования со знаком сигнала задания.Выходы элементов 8 и 9 включены на входы элемента 10, третий вход которого включен на выход 24 распределителя 22 импульсов,вырабатывающего5 13207 на этом выходе второй импульс стробирования. В момент строба реализуется логическая функция(13 ф 11 ч ГЗ 11) (б 11 У 6 11),в результате чего появление импульса на выходе элемента 10 фиксирует момент несоответствия знака сигнала результата интегрирования со знаком сиг 10 нала задания и одновременно со знаком сигнала результата вычитания. Выход элемента 10 включен на вход ч установки цифрового параллельного сумматора- накопителя. Поэтому в момент возник новения сигнала несоответствия, который вырабатывает элемент 10, этим сигналом цифровой интегратор 3 устанавливается в нулевое состояние, т,е. заменяется сигнал результата 20 интегрирования на другой исходный сигнал (в данном случае нулевой), начиная с которого далее интегрируют результат вычитания.25Формула изобретенияПропорционально-интегральный регулятор, содержащий блок вычитания, интегратор и сумматор, причем шина зна ка и шина модуля первой группы входов блока вычитания соединены с соответствующими шинами первой группы входов пропорционально-интегрального регулятора, шина знака и шина модуля второй группы входов блока вычитания подключены к соответствующим 92 6шинам второй группы входов пропорционально-интегрального регулятора, выходные шины знака и модуля блока вычитания подсоединены к соответствующим шинам интегратора и соответствующим шинам первой группы входов сумматора, у которого шины знака и модуля второй группы входов подключены к соответствующим выходным шинам интегратора, выходные шины знака и модуля сумматора соединены с соответствующими выходными шинами пропорционально-интегрального регулятора о т - л и ч а ю щ и й с я тем, что, с целью повышения точности и быстродействия, в него введены два элемента НЕРАВНОЗНАЧНОСТЬ, элемент СОВПАДЕНИЯ, блок управления, первый вход первого элемента НЕРАВНОЗНАЧНОСТЬ подключен к выходной шине знака блока вычитания, первый вход второго элемента НЕРАВНОЗНАЧНОСТЬ соединен с шиной знака первой группы входов блока вычитания, вторые входы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ соединены с выходной шиной знака интегратора, выходы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ связаны соответственно с первым и вторым входами элемента совпадения, выход которого подключен к входу "Установка" интегратора, первый, второй и третий выходы распределителя импульсов связаны соответственно с тактовымвходом интегратора, третьим входомэлементов совпадения и тактовымвходом сумматора.1320792 Составитель С, Никишоведактор Е. Конча Техред М.Иоргеитал Корректор о 1 Тирак 863 НИИПИ Государственног по делам изобретений 35, Москва, Ж"35, Рауш каэ 265 Подписнокомитета СССРи открытийская наб., д, 4/5 13 роектная, 4 Производственно-полиграфическое предприятие, г. Ужгород
СмотретьЗаявка
4011568, 13.01.1986
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО СТАНКОСТРОЕНИЯ
ВОЛЬБЕРГ ОВСЕЙ ЛЬВОВИЧ, ДЕМИДОВ СЕРГЕЙ ВЛАДИМИРОВИЧ, КАЗАНСКИЙ ВЛАДИСЛАВ АЛЕКСАНДРОВИЧ, МУЧНИК ЭМИЛЬ СЕМЕНОВИЧ, РУБАШКИН ИГОРЬ БОРИСОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: пропорционально-интегральный, регулятор
Опубликовано: 30.06.1987
Код ссылки
<a href="https://patents.su/5-1320792-proporcionalno-integralnyjj-regulyator.html" target="_blank" rel="follow" title="База патентов СССР">Пропорционально-интегральный регулятор</a>
Формирователь сигнала контура знака

Номер патента: 1185654
Опубликовано: 15.10.1985
МПК: H04N 5/262
Метки: знака, контура, сигнала, формирователь
...на время, кратное длительности элемента знака, регистры 2 - 4 сдвига осуществляют 25 задержку сигналов на время, кратное периодам соответственно предшествующей, последующей и текущей строк.От генератора (синтезатора) знаков (на фиг. 1 не показан) в параллельном коде по входу 10 поступают сигналы знака на информационные входы регистров 2 - 4 сдвига.На тактовые входы регистров 2 - 4 сдвига (фиг. 2) подаются импульсы частоты элементов знака (фиг. 8 а). На вход управления Запись-считывание регистра 4 сдвига текущей строки от блока 6 подается импульс (фиг, 8 в). По срезу фронта импульсов частоты элементов знака (фиг. 8 а) во время действия управляющего импульса (фиг. 8 в) сигналы текущей строки знака записываются в регистр 4 сдвига...
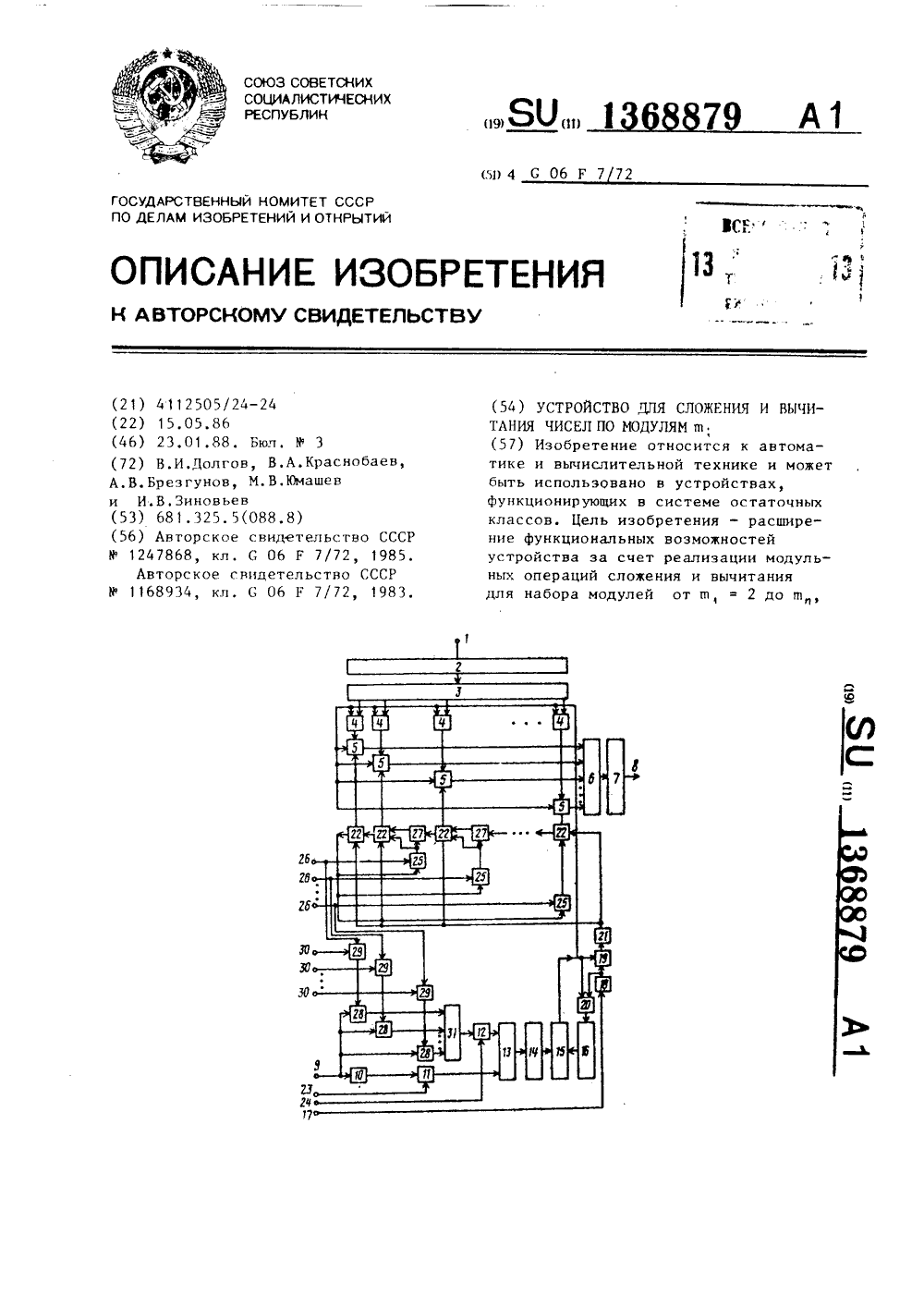
Устройство для сложения и вычитания чисел по модулям
Номер патента: 1368879
Опубликовано: 23.01.1988
Авторы: Брезгунов, Долгов, Зиновьев, Краснобаев, Юмашев
МПК: G06F 7/72
Метки: вычитания, модулям, сложения, чисел
...элемент И 19 и 20 и открывает элементы И 5 и ключевые элементы 4. При наличии сигнала шины 23 (код операции сложения) с выхода регистра 10 операнд 3; через открытый элемент И 11, элемент ИЛИ 13 поступает в регистр 14, а при наличии сигнала шины 24 (код операции вычитания) с выхода 1-го сумматора 28 значение 9, = ш1через элементы ИЛИ 31, открытый элемент И 12, элемент ИЛИ 13 поступает в регистр 14. В этом случае происходит сдвиг разрядов регистра 22 по образованному контуру (по данному модулю ш,) на , (или (,) разрядов против часовой стрелки. С выхода а -1 го разряда регистра 22 результат операции через открытый а; -й элемент И 5, через элемент ИЛИ 6 поступает на вход регистра 7. Формула изобретения Устройство для сложения и...
Устройство кодирования телевизионного сигнала

Номер патента: 1381730
Опубликовано: 15.03.1988
Авторы: Епанечников, Петруня, Сардыко
МПК: H04N 7/50
Метки: кодирования, сигнала, телевизионного
...последующихсмежных кадра. На диаграммах можновидеть, что информация, записываемаяблоком 13 перезаписи телевизионногосигнала в течение интервала одноготелевизионного поля, выводится изнего за интервал, равный двум полям,Аналогично работает блок 34 памяти,входящий в блок 3,С выхода двухканального коммутатора 4 информационные сигналы подаютсяна вход сумматора 5, где вычисляетсясреднее значение по кодируемому фрагменту а В блоке 6 вычитания определяется разность между значениемкаждого элемента кодируемого фрагмента и значением а, для данного фрагмента (те. у; -а,). Сумматор 1 модулей осуществляет сложение модулейуказанных разностей. Результаты этихвычислений (а, а и матрица знаковразности, полученных при вычислениикоэффициента а для...
Устройство для сложения и вычитания чисел по модулям

Номер патента: 1383341
Опубликовано: 23.03.1988
Авторы: Зиновьев, Краснобаев, Пироженко, Экста
МПК: G06F 7/49
Метки: вычитания, модулям, сложения, чисел
...чисел по модулям ш;. Устройство запускается сигналом шины 17, а с выхода генератора 18 импульсы через элемент И 19, умножитель 21 поступаит на сдвигаищие входы разрядов КСР22Одновременно с выхода генератора18 через элементы И 20 импульсы поступают на вход счетчика 16. Присравнении содержимого приемного регистра 14 и счетчика 16 выходной сигнал схемы 15 сравнения закрывает элементы И 19 и 20 и открывает элементыИ 5 и ключевые элементы 4. 11 ри нали Очии сигнала шинн 23 (код операциисложения) с выхода регистра 10 операнд; через открытий элемент И 11, элемент ИЛИ 13 поступает в регистр 14,а при наличии сигнала шины 24 (кодоперации вычитания) с выхода -госумматора 28 значение= ш; - р;через элементы ИЛИ 31, открытый элемент И 12, элемент ИЛИ...
Устройство для определения знака приращения сигнала

Номер патента: 752331
Опубликовано: 30.07.1980
Авторы: Жигулевцев, Литягин, Прохоренко, Степанченко
МПК: G06F 7/38
Метки: знака, приращения, сигнала
...присутствует комбинация ОО, а триггеры 5 находятся в исходном состоянии, при котором на их единичных выходах присутствует сигнал О, и на выходе схемы 7 ИЛИ также присутствует сигнал О, запрещающий формирование импульсов генератора б. В прямом направлении движения на входах 1 и 2 появляется комбинация сигналов 1, О. При этом, на входе схемы 4 И, один из входов которого соединен с нулевым выходом первого триггера 5 появляется сигнал 1.Этот сигнал появляется также на выходе схемы 7 ИЛИ, разрешая работу генератора б импульсов, и поступает также на информационный вход триггера 9 знака. Генератор б формирует один импульс, который переводит первый триггер 5 в состояние, при котором на его единичном выходе появляется сигнал 1, а на...
Предыдущий патент: Компаратор тока
Следующий патент: Цифровая система для программного управления двигателем
Случайный патент: Обучающее устройство