Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1285427
Авторы: Новогранов, Степанов
Текст
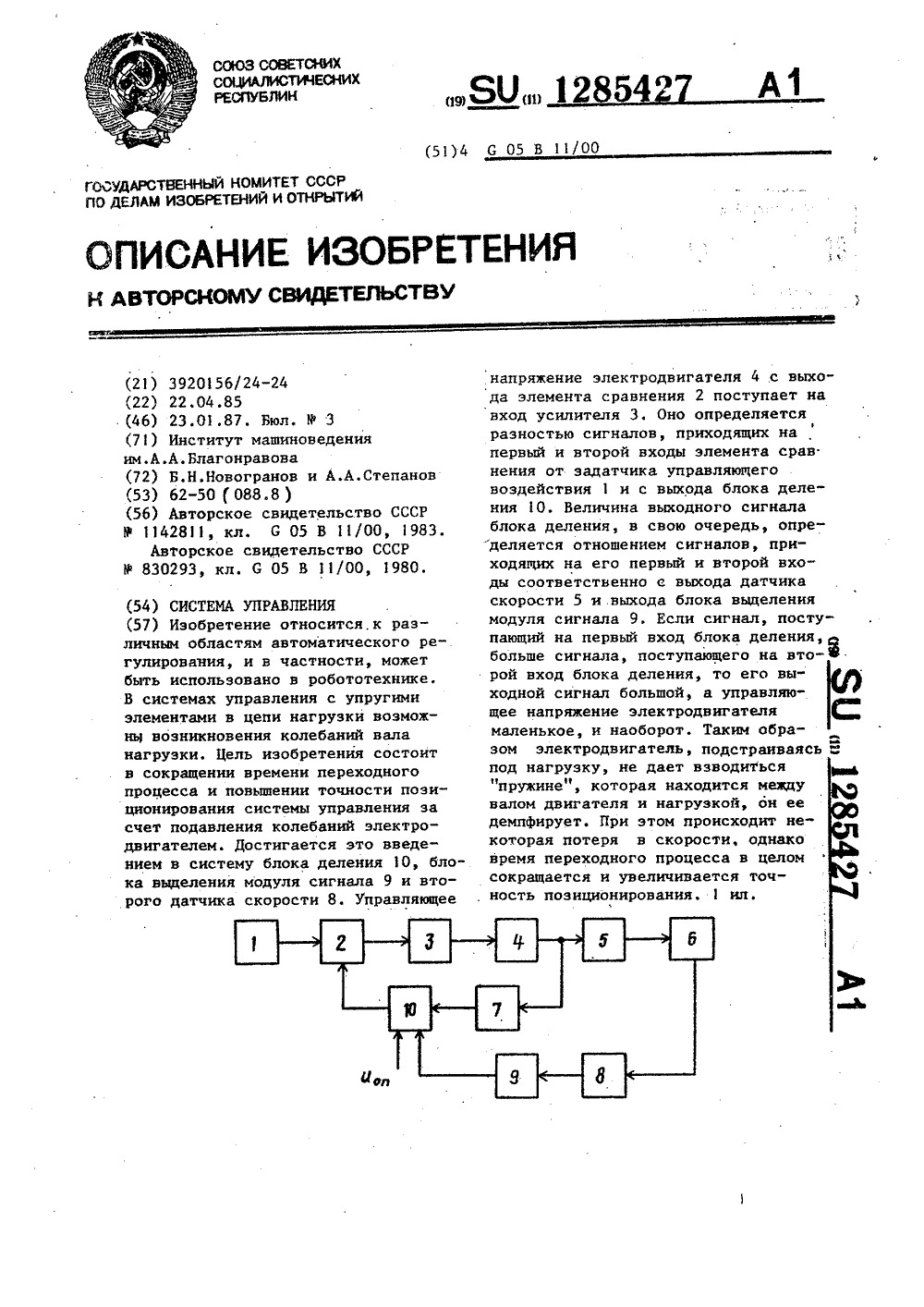
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН ииЯОии 12854 05 В Е ИЗОБРЕТЕН ИДЕТЕЛЬСТВУ АВТОРСКОМ(57) Изобретение относится,к различным областям автоматического регулирования, и в частности, можетбыть использовано в робототехнике,В системах управления с упругимиэлементами в цепи нагрузки возможнь возникновения колебаний валанагрузки. Цель изобретения состоитв сокращении времени переходногопроцесса и повьппении точности позиционирования системы управления засчет подавления колебаний электродвигателем. Достигается это введением в систему блока деления 10, блока выделения модуля сигнала 9 и второго датчика скорости 8. Управляющее УДАРСТВЕННЫЙ НОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(56) Авторское свидетельство СССРУ 1142811, кл, С 05 В 11/00, 983.Авторское свидетельство СССРУ 830293, кл. С 05 В 11/ОО, 1980. напряжение электродвигателя 4 с выхода элемента сравнения 2 поступает на вход усилителя 3. Оно определяется разностью сигналов, приходящих на первый и второй входы элемента срав нения от задатчика управляющего воздействия 1 и с выхода блока деления 10. Величина выходного сигнала блока деления, в свою очередь, определяется отношением сигналов, приходящих на его первый и второй входы соответственно е выхода датчика скорости 5 и выхода блока выделения модуля сигнала 9. Если сигнал, поступающий на первый вход блока деления,больше сигнала, поступающего на вто-рой вход блока деления, то его выходной сигнал большой, а управляющее напряжение электродвигателя маленькое, и наоборот. Таким образом электродвигатель, подстраиваясьпод нагрузку, не дает взводиться"пружине", которая находится между валом двигателя и нагрузкой, он ее демпфирует. При этом происходит не которая потеря в скорости, однако время переходного процесса в целом сокращается и увеличивается точность позиционирования.кп.Заказ 7640/48 Тираж 862ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб д.4/5а Подписное Производственно-полиграфическое предприятие, г.ужгород, ул. Проектная,4 Изобретение относится к различным областям автоматического регулирования и может быть использовано в робототехнике.5 Цель изобретения - сокращениевремени переходного процесса н повышение точности позиционирования системы.На чертеже приведена блок-схема Опредлагаемой системы управления.Система содержит задатчик 1 управляющего воздействия, элемент 2 сравнения по скорости, усилительэлектродвигатель 4, редуктор 5, объет 6 регулирования, первый датчик 7скорости, второй датчик 8 скорости,блок 9 выделения модуля сигнала иблок 10 деления.При проектировании системы принято,что редуктор абсолютно жесткий, авал двигателя связан с нагрузкойчерез "пружину", жесткость которойсоответствует жесткости реальногоредуктора,25Система работает следуизцим образом,Задатчик 1 управляющего воздействия вырабатывает управляющий сигналР, который поступает на первый вход 30элемента 2 сравнения. На второй входэлемента 2 сравнения поступает сигнал 7 с выхода блока 10 деления.Эти сигналы сравниваются и элемент2 сравнения вырабатывает управляющее 35напряжение Е для электродвигателя 4.Этот сигнал усиливается усилителем 3и поступает в якорную цепь электродвигателя 4, приводящего в действиеобъект 6 регулирования через редуктор 5, На первый вход блока О деления поступает сигнал Е от датчика 7пропорциональный скорости электродвигателя 4. Сигнал Я, пропорцио"нальный скорости объекта 6 регулирования, от датчика 8 поступает наблок 9 вьщеления модуля сигнала. С 7 2выхода блока 9 модуль сигнала Я приходит на второй вход блока 10 деления,Кроме того, на второй вход блока 10деления поступает опорное напряжение 1для исключения деления нануль. Идея заключается в том, чтобыс помощью электродвигателя подавлятьколебания нагрузки, Блок 10 делениябыстро выравнивает сигналы Р и УСигнал У определяется отношением сиг,налов Е и 1. Если ЕЯ, то У - большое, следовательно, управляющее нап 1.яжение электродвигателя, которомусоответствует сигнал С, - маленькое, так какопределяется разностью сигналови У, И наоборот,если Е ( , то 7 - малое, а С - большое. Таким образом, двигатель какбы подстраивается под нагрузку. Физически это означает, что двигательне дает взводиться "пружине", которая находится между валом двигателяи нагрузкой, он ее демпфирует.Формула изобретения Система управления, содержащаяпоследовательно соединенные задатчикуправляющего воздействия, элементсравнения по скорости, усилитель,электродвигатель и редуктор, подключенный к входу объекта регулирования, и датчик скорости, вход которого соединен с выходом электродвигателя, о т л и ч а ю щ а я с я тем,что, с целью сокращения времени переходного процесса и повышенияточности позиционирования системы,в нее введены последовательно .соединенные второй датчик скорости, блоквьщеления модуля сигнала и блок деления, второй, вход которого соединенс выходом первого датчика скорости,выход блока деления соединен с вторым входом элемента сравнения поскорости, а вход второго датчикаскорости соединен с выходом объектарегулирования,
СмотретьЗаявка
3920156, 22.04.1985
ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. А. А. БЛАГОНРАВОВА
НОВОГРАНОВ БОРИС НИКОЛАЕВИЧ, СТЕПАНОВ АНДРЕЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки:
Опубликовано: 23.01.1987
Код ссылки
<a href="https://patents.su/2-1285427-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для стабилизации скорости вращения электродвигателя

Номер патента: 736318
Опубликовано: 25.05.1980
Авторы: Лянзбург, Шароглазов
МПК: H02P 5/06
Метки: вращения, скорости, стабилизации, электродвигателя
...форму. В рассматриваемом режиме ОгО 4, поэтому дОимеет отрицательную полярность. Выходное напряжение Ор блока 3 пропор 45ционально величине дО, а моментдвигателя М, в свою очередь, пропорционален напряжениюО . Знак Величин Ор и М совпадает со знаком ЬО.Так как ВО сО, то и М(0, т.е. дви 50гатель развивает тормозной момент. Поддействием этого момента скорость двигателя снижается от первоначальногозначения -Й. , Списанный режим продолжается до тех пор, пока не возникнет55ситуация, при которой в промежутке между двумя скачками напряжения Оос появпяется два скачка напряжения О.п (по.казано пунктиром на фиг. 2) в третьем периоде напряжеш 1 я ОосПри этом1между двумя им 1 Гпьс,ми О /. с Выходасхемы 11 проходят два импульса с вы.хода схемы 6 и...
Устройство для регулирования скорости вращения электродвигателя

Номер патента: 955471
Опубликовано: 30.08.1982
Авторы: Закорюкин, Староверов, Терехов
МПК: H02P 5/00
Метки: вращения, скорости, электродвигателя
...частот Еэ и Е .Коррекция, необходимая для обеспечения устойчивости работы регулятора скорости и работающая только при небольших рассогласованиях час тот Ез и Еи, осуществляется изменением фазы сигнала частоты Ен на величину, пропорциональную отклонению скорости вращения вала исполнительного двигателя. 25Установившийся режим работы устройства возможен только при Ез = Е или Тз = Т . Поэтому отклонение скорости от установившегося значения .можно выявить, сравнивая период Тн измеренной частоты с периодом Тз эталонной частоты.Для упрощения введения опережающего по фазе частоту Ен сигнала при отрицательной разности сравниваемых периодов, возникающей при отклонении35 скорости вращения двигателя вверх от установившегося значения; в...
Устройство для регулирования скорости тяговых электродвигателей транспортного средства

Номер патента: 1036583
Опубликовано: 23.08.1983
Авторы: Буравлев, Вершинин, Добрынин, Мартынов, Рудаков, Филиппов
МПК: B60L 9/08
Метки: скорости, средства, транспортного, тяговых, электродвигателей
...двигателя 3 подключен к оцному из входов второго блока 16 сравнения, другой вход которого соединен с эадатчиком 17 скорости, а выход - к другому входу второго дополнительного блока 16 сравнения. Выход блока 15 сравнения через другой согласующий уси- . литель 18 соединен с другим входом первого блока 8 сравнения.,Устройство для регулирования скороо ти тяговых двигателей транспортного средства работает следующим образом.В установившемся режиме движения обмотки б возбуждения тяговых электродвигателей 3 и 4 получают питание от независимого возбудителя 6, а якорные обмотки тяговых электродвигателей 3 и 4 получают питание от тиристорного регулятора 1. В блоке 16 сравнениясравниваются сигналы задания скорости от эадатчика 17 скорости и текущего...
Устройство для регулирования скорости вращения электродвигателя

Номер патента: 495648
Опубликовано: 15.12.1975
Авторы: Лаврентьев, Степанов, Тимошенко
МПК: G05D 13/00
Метки: вращения, скорости, электродвигателя
...вызванные введением дополнительных узлов -- фазового ЦСК 1)ИМИ 11 с 1 ТОРс 1 Ц ОфЕРНОГО УСИЛИТСЛ 51з;1 ключяется в том, что скорость вращения ):1 ЕКТРОДВИГВТСЛЯ 0 Нс 1 СТРс 1 ИВЯЕТСЯ НЯ Частотч синхронизации, ц ца входы ждущего мультцвцбратора 10 подаются сигналы, сформированные формирователями 8, 9; сигнал сиц хроцизации с угловой частотой . и сигнал датчика скорости кадровой частоты .Зтц сигналы прц ,=-(5)(1 поступают с м 1 П 1 цмальцым временным рассогласовяццсм, ооусловлснным лшць ошибкой настройкой. 1 СЦГЦЯЛ, КОТОРЫЙ РЯПЫНС ПОЯВЛЯЕТС 5 Пс) 1 КОДС )кд) щего мультцвибратора 10, запускает его, ц 1)Ор)ИрОВяТЕЛЬ1 ЛИ 11 Е 5 ПО-Нс)рс)стс 110 цСГО цс 1- 1 Р 51 ЖСНЦЯ ВЫРс)оат 1 васТ С 1 ГНВЛЫ, ГОСТУПс 110- 1 ццс на первые входы...
Устройство для управления скоростью вращения электродвигателя лентопротяжного механизма

Номер патента: 615532
Опубликовано: 15.07.1978
Авторы: Богатырев, Никитченко, Родзинский, Юрасов
МПК: G11B 15/46
Метки: вращения, лентопротяжного, механизма, скоростью, электродвигателя
...чертеже показан вариант описываемого. устройства, содержащего источник питания , подключенный к блоку электродвигателя 2, выполненному с управляющим вхо. дом. Блок электродвигателя 2 состоит. изусилителя мощности и из электродвигателя, смонтированного с возможностью перемещения магнитной ленты, Блок электродвигателя 2 соединен через частотно-зависимый дат О чнк скорости вращения 3, например синхрон.ный тахогенератор с входом частотного дис.криминатора 4.Источник питания 1 соединен через аттенюатор 5 и первый резистор 6 с входом 2операционного усилителя 7, выход которого615532 формула изобретения Составитель Е. РозановТекред О. Луговая Корректор Тираж 717 Подписное Редактор С. ХейЗаказ 3916/41 ИПИ, Государственного по делам...
Предыдущий патент: Часы для слепых
Следующий патент: Цифровая динамическая следящая система
Случайный патент: Захватное устройство для длинномерных грузов