Устройство формирования управляющего сигнала следящего привода
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
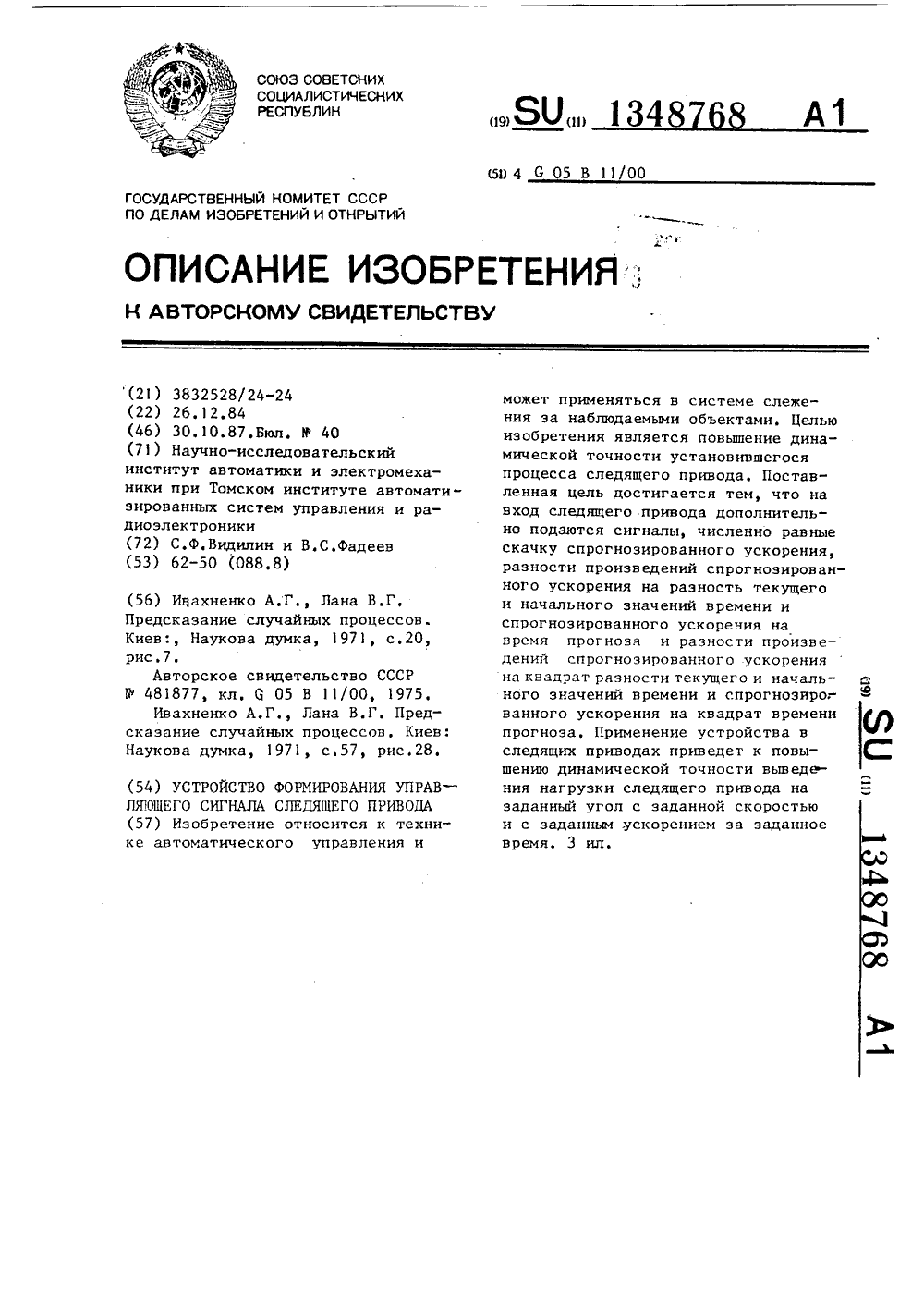
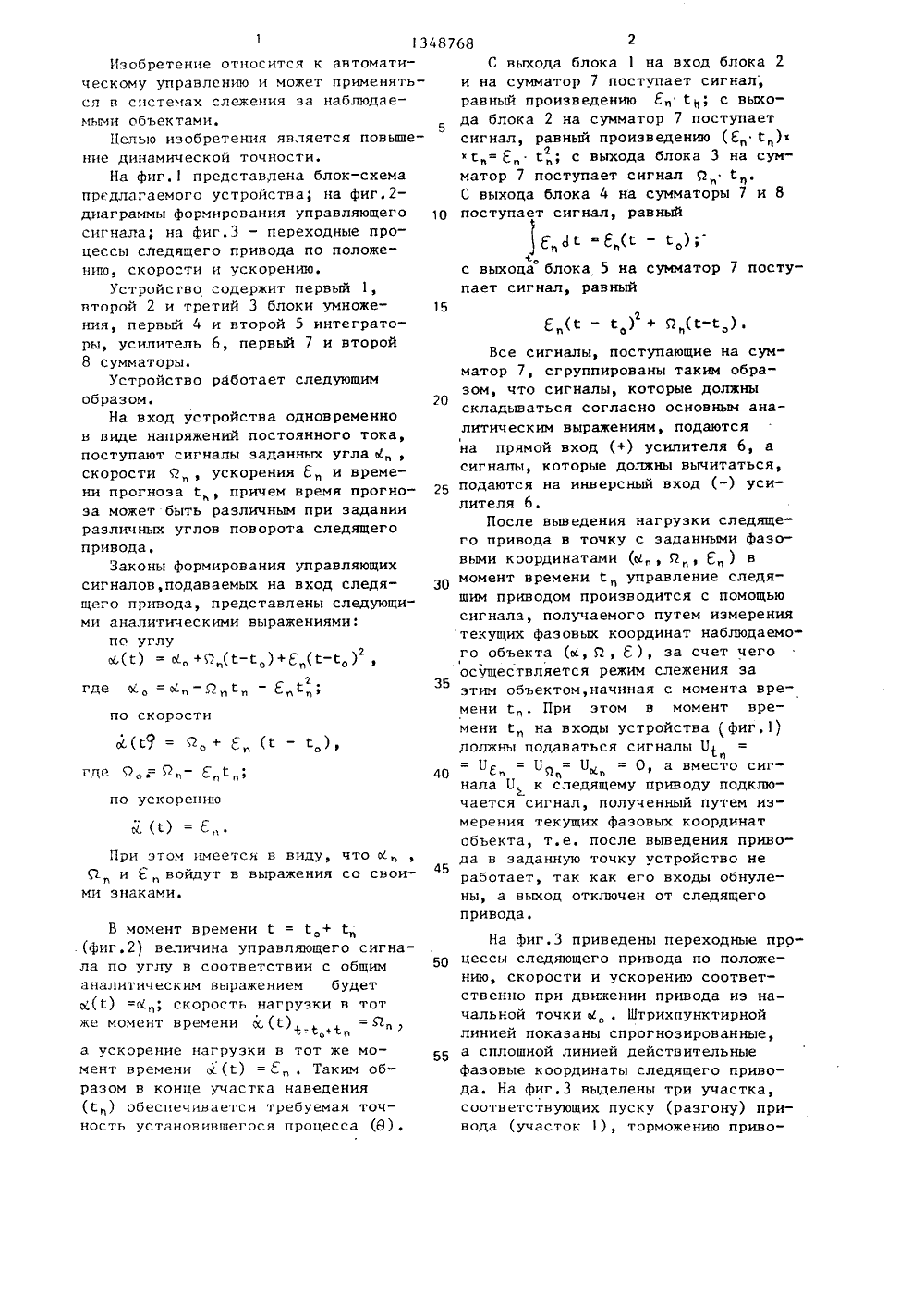
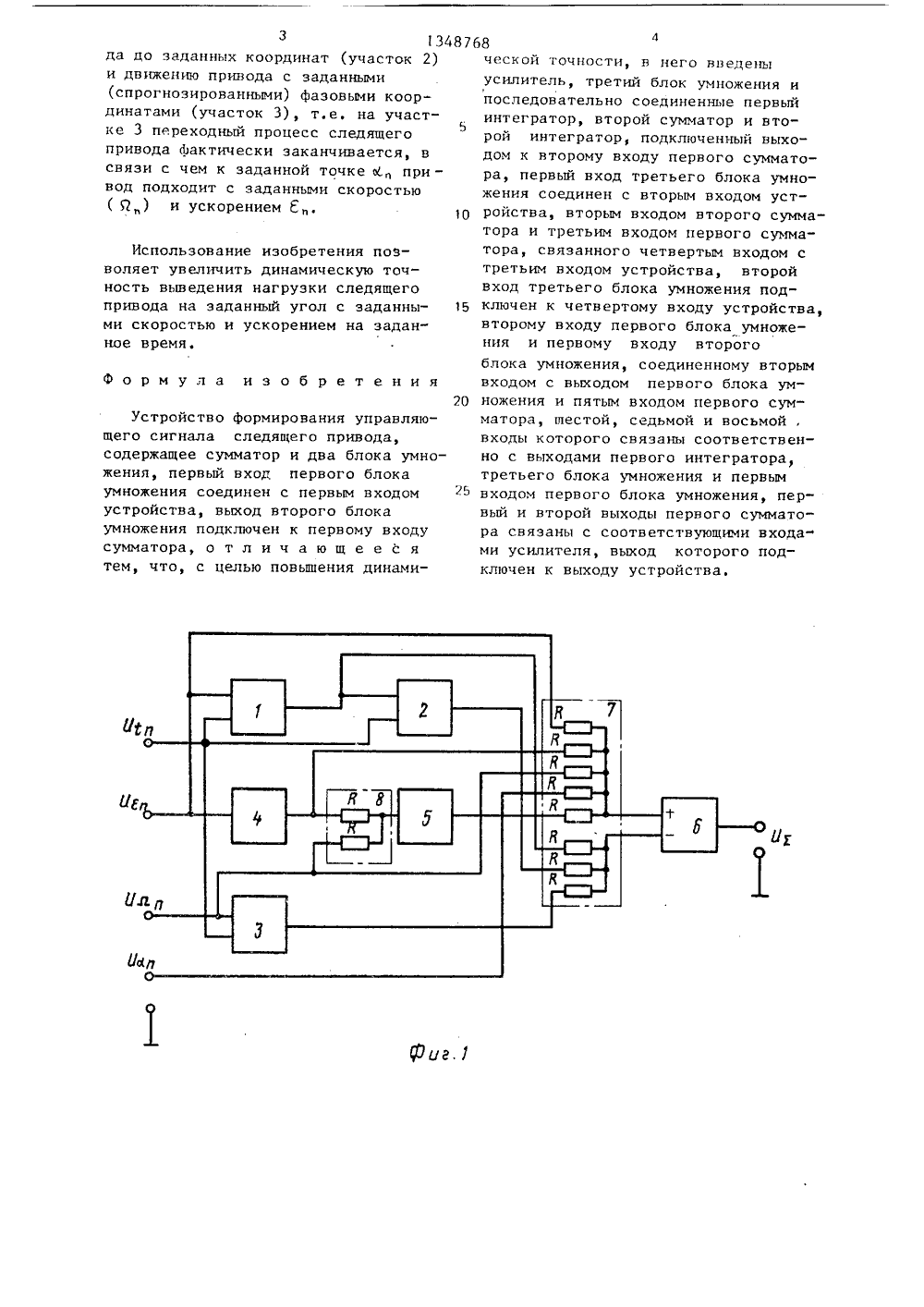
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК 4 и 4 С 05 В 11/О ПИСАНИЕ ИЗОБРЕТЕНИЯ". может применятьсяния эа наблюдаемым истеме слеже объектами, Целью повышение динаизобретения являетсмической точности упроцесса следящеголенная цель достига скийктромех становившегося привода. Постав- ется тем, что на ода дополнительчисленно равные е автоматиния и раход следящего про подаются сигнал адеев скачку с разности ного уск исп чального значении временм(54) УСТРОЙСТВО ЛЯОЩЕГО СИГНАЛА (57) Изобретени ке автоматическ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Научно-исследователинститут автоматики и элники при Томском институзированных систем управлдиоэлектроники(56) Ивахненко А.Г., Лана В.Г, Предсказание случайных процессов. Киев:, Наукова думка, 197, с.20, рис.7Авторское свидетельство СССР Р 481877, кл. О 05 В 11/00, 1975.Ивахненко А,Г Лана В.Г. Предсказание случайных процессов, Киев Наукова думка, 1971, с.57, рис.28.ФОРМИРОВАНИЯ УПРАВ СЛЕДЯЩЕГО ПРИВОДАе относится к техни ого управления и огнозированного ускорения,роизведений спрогнозированения на разность текущего рогнозированного ускорения на время прогноза и разности произведений спрогнозированного ускорения на квадрат разности текущего и начального значений времени и спрогнозиро; ванного ускорения на квадрат времени прогноза. Применение устройства в следящих приводах приведет к повышению динамической точности выведения нагрузки следящего привода на заданный угол с заданной скоростью и с заданным ускорением за заданное время. 3 ил.м. (е) = Е 50 55 Изобретение относится к автоматическому управлению и может применяться в системах слежения эа наблюдаемьяи объектами.Целью изобретения является повышение динамической точности.На фиг. представлена блок-схема предлагаемого устройства; на фиг.2- диаграммы формирования управляющего сигнала; на фиг.3 - переходные процессы следящего привода по положещпо, скорости и ускорению.Устройство содержит первый 1, второй 2 и третий 3 блоки умножения, первый 4 и второй 5 интеграторы, усилитель 6, первый 7 и второй 8 сумматоры.Устройство работает следующим образом.На вход устройства одновременно в виде напряжений постоянного тока, поступают сигналы заданных угла Ы, скорости Я, ускорения Е и времени прогноза , причем время прогноза может быть различным при задании различных углов поворота следящего привода.Законы формирования управляющих сигналов, подаваемых на вход следящего привода, представлены следующими аналитическими выражениями:по углум. (с) = ы, +й(е-с,)+ С(с-е, ), где х, = - Л, 1 по скоростик(с 9 = й, + (с - с.),При этом имеется в виду, что о и Евойдут в выражения со своими знаками. В момент времени= Т,+ .(фиг,2) величина управляющего сигнала по углу в соответствии с общим аналитическим выражением будет (1) =; скорость нагрузки в тотже момент времени Й,= о рфоо а ускорение нагрузки в тот же момент времени с = Я . Таким образом в конце участка наведения (С) обеспечивается требуемая точность установившегося процесса (9). 25 30 35 40 45 С выхода блока 1 на вход блока 2 и на сумматор 7 поступает сигнал, равный произведению Я С, с выхода блока 2 на сумматор 7 поступает сигнал, равный произведению (6 Е) С= Я ; с выхода блока 3 на сум 2.матор 7 поступает сигнал й й. С выхода блока 4 на сумматоры 7 и 8 поступает сигнал, равный Гдс -Я(ос выхода блока, 5 на пает сигнал, равный Я(е - с,) + й(с-е,) . Все сигналы, поступающие на сумматор 7, сгруппированы таким образом, что сигналы, которые должны складываться согласно основным аналитическим выражениям, подаются на прямой вход (+) усилителя 6, а сигналы, которые должны вычитаться, подаются на инверсный вход (-) усилителя 6После выведения нагрузки следящего привода в точку с заданными фазовыми координатами (м, 0, Е ) в момент времениуправление следящим приводом производится с помощью сигнала, получаемого путем измерения текущих фазовых координат наблюдаемого объекта (о, й, Г), за счет чего осуществляется режим слежения эа этим объектом, начиная с момента времени Т. При этом в момент времени с на входы устройства ( фиг.1) должны подаваться сигналы П = Б = П = Б = О а вместо сигфнала Б к следящему приводу подключается сигнал, полученный путем измерения текущих фазовых координат объекта, т,е. после выведения привода в заданную точку устройство не работает, так как его входы обнулены, а выход отключен от следящего привода. На фиг.3 приведены переходные процессы следяющего привода по положению, скорости и ускорению соответственно при движении привода из начальной точки Ы, . Штрихпунктирной линией показаны спрогнозированные, а сплошной линией действительные фазовые координаты следящего привода. На фиг,3 выделены три участка, соответствующих пуску (разгону) привода (участок 1), торможению привоз 3487 да до заданных координат (участок 2) и движению привода с заданными (спрогноэированньпчи) фазовыми координатами (участок 3), т.е, на участке 3 переходный процесс следящего привода фактически заканчивается, в связи с чем к заданной точке К при - вод подходит с заданными скоростью ( Й) и ускорением Е.Использование изобретения позволяет увеличить динамическую точность выведения нагрузки следящего привода на заданный угол с заданны ми скоростью и ускорением на заданное время.Формула и э о б р е т е н и я20Устройство формирования управляющего сигнала следящего привода, содержащее сумматор и два блока умножения, первый вход первого блока умножения соединен с первым входом устройства, выход второго блока умножения подключен к первому входу сумматора, о т л и ч а ю щ е е с я тем, что, с целью повышения динами 684ческой точности, в него введены усилитель, третий блок умножения и последовательно соединенные первый интегратор, второй сумматор и второй интегратор, подключенный выходом к второму входу первого сумматора, первый вход третьего блока умножения соединен с вторым входом устройства, вторым входом второго сумматора и третьим входом первого сумматора, связанного четвертым входом с третьим входом устройства, второй вход третьего блока умножения подключен к четвертому входу устройства, второму входу первого блока умножения и первому входу второго блока умножения, соединенному вторым входом с выходом первого блока умножения и пятым входом первого сумматора, шестой, седьмой и восьмой входы которого связаны соответственно с выходами первого интегратора, третьего блока умножения и первым входом первого блока умножения, первый и второй выходы первого сумматора связаны с соответствующеи входами усилителя, выход которого подключен к выходу устройства..Реиетн едакто ор ковская писное изводственно-полиграфическое предприятие, г.ужгор ектн аз 5186/45 Тираж 862 ВНИИПИ Государственного по делам изобретений и 113035, Москва, Ж, Рауш
СмотретьЗаявка
3832528, 26.12.1984
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ ПРИ ТОМСКОМ ИНСТИТУТЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
ВИДИЛИН СЕРГЕЙ ФЕДОРОВИЧ, ФАДЕЕВ ВЛАДИМИР СТЕПАНОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: привода, сигнала, следящего, управляющего, формирования
Опубликовано: 30.10.1987
Код ссылки
<a href="https://patents.su/4-1348768-ustrojjstvo-formirovaniya-upravlyayushhego-signala-sledyashhego-privoda.html" target="_blank" rel="follow" title="База патентов СССР">Устройство формирования управляющего сигнала следящего привода</a>
Устройство для определения временного шага дискретизации случайного сигнала

Номер патента: 656047
Опубликовано: 05.04.1979
МПК: G06G 7/52
Метки: временного, дискретизации, сигнала, случайного, шага
...случайного сигнала от блока управления 10 на входсчетчика 9 начинают поступать счетные импульсы, т.е. начинается формирование временного шага дискретизации входного сигнала. После сбросаустройства в начальное состояние кодреверсивного счетчика 7 соответствует нулевому значению, Нулевому значению соответствует в начале работыустройства и интервал дискретизации,так как компаратор 8 сразу же формирует выходной сигнал. Далее, впроцессе работы устройства код реверсивного счетчика 7 изменяется,Импульсы блока управления 10,поступая в счетчик 9, формируют внем код, равный коду реверсивногосчетчика . При равенстве кодов срабатывает цифровой комнаратор 8, который формирует выходной сигнал и.через блок управления 10 подает одновременно сигналы...
Устройство для регистрации времени входа и выхода

Номер патента: 875415
Опубликовано: 23.10.1981
Авторы: Баженов, Графенбергер, Матвеев, Чех, Шкроб
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...7 памяти, способный хранить его (один) массив информации. Он хранится здесь до,тех пор, пока 5 4вахтер охраны (иди устройство идентификации) не убедится в соответствиитабельному номеру лица фактически следующего через контроль. По окончанииэФой операции сотрудник охраны (илиустройство идентификадии) замыкаетвторой ключ 8, вследствие чего массивинформации поступает в блок 9 выдачиинформации, и записывается на магнитную ленту. Одновременно на вход блока 11 индикации поступает через второй ключ 8 сигнал переключения, по исполнении которого система возвращается в исходное состояние. Процесс по- .вторяется, как только очередной сотрудник увидит зеленый сигнал блокаиндикацииЧастота следования сотрудников определяется временем их...
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Устройство для регистрации времени входа и выхода

Номер патента: 963026
Опубликовано: 30.09.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...впемени входаи выхода содержит датчики.1 направления, 55блок 2 считывания, элементы И 3 и 4, компараторы 5, задатчики 6 адреса, элементы ИЛИ7 и 8, блок 9 контроля кода, блок 1 О управ. ления, счетчик 11 импульсов, блок 12 регист. рации, датчик 13 времени и пульт 4 управления.При наличии заявки с любого блока 2 считывания через первый элемент ИЛИ 7 запускается блок 10 управления, который сЬормирует1код текущего адреса блока 2 считывания и выдает его на компараторы 5. В задатчиках 6 адресов блоков 2 считывания при монтаже устройства заложены их порядковые номера. Комнаратор 5, укоторого поступивший код совпал с кодом задатчика 6 алреса, открывает элементы И 3 и 4. Инфоомация, считываемая с жетона - пропуска, ппедставляет собой...
Устройство для определения времени полезного функционирования системы на заданном ресурсе

Номер патента: 982044
Опубликовано: 15.12.1982
Авторы: Бакурадзе, Воробьев, Ерин, Солнцев, Степанов, Сугак
МПК: G07C 3/10
Метки: времени, заданном, полезного, ресурсе, системы, функционирования
...7 И. В элементе б сравнения сравнивается величина г ресурса на нейтрализацию возмущений в системе с числом нарушенийв системе. В случае, когда ресурса на нейтралиазацию возмущений окажется не менее числа 1 нарушений, т.е,г1, управляющий сигнал с первого выхода элемента б сравнения поступает на первый вход первого элемента 7 И, с выхода которого значение 1 числа нарушений в системе поступает на второй вход первого блока 8 умдожения, в котором подсчитывается. значение факто- риала величины 1, т.е. вычисляется 1, также значение 1 с выхода первого элемента 7 И поступает на первый вход блока 2 возведения в степень, в котором вычисляется значение величины", которое с выхода блока 2 возведения в степень поступает на второй вход первого блока 9...