G05B 13/00 — Самонастраивающиеся системы управления, т.е. системы, автоматически выбирающие оптимальный режим работы для достижения заданного критерия
Способ формирования управляющего воздействия в системах автоматического регулирования

Номер патента: 920632
Опубликовано: 15.04.1982
Авторы: Абрамов, Аксельрод, Зеликин, Кикин, Леонтьев, Нисневич
МПК: G05B 13/00
Метки: воздействия, системах, управляющего, формирования
...ошибки системы, обусловленную наличием интегральной составляющей в законе регулирования.Способ формирования управляющего воздействия в системах автоматического регулирования осуществляется следующим образом. ООпределяют оассогласование между регулируемой величиной и ее заданным значением и интегрируют цолуценное рассогласование, Определяют безынт гральную составляюшую управляющего 5 воздействия на исполнительный орган,Определяют корректирующий сигнал у, как Составитель С. ИсаковРедактор , Товтин Техред А.Бабинец Корректор О. Билак иЗаказ 2338/5 Тираж 908 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий13035, Иосква, Ж, Раушская наб., д, /5 Филиал ППП нПатент г, Ужгород, ул, Проектная,где Л - абсолютная...
Устройство для управления движением оптической каретки в интерферометре

Номер патента: 934445
Опубликовано: 07.06.1982
Авторы: Гордеев, Дедловский, Пантелеев
МПК: G05B 13/00
Метки: движением, интерферометре, каретки, оптической
...25 в виде цилиндрических стержней, концы которых40 снабжены шарами 26, жестко закреплены во:фланце оси 22. Ось 22 установлена в подшипнике 27. На направляющей 1 расположены ограничители 9 движения, к которым прикреплены концевые выключатели 6. Ограничители 9 движения имеют 4 возможность скольжения по направляющей 1, при этом они снабжены стопорами. Ведомый ролик 2 и ведущий узел 11 закреплены на торцах направляющей 1.На направляющей 1 расположена карет о ка 7, к которой жестко прикреплены концы тросика 5, проходящего в пазах винтовой нарезки 17 со сферическим профилем и.ведомых роликов 2, Ось 22 вилки 21 сцепления через муфту 13 связа иа с валом двигателя 12. Один из ведомых роликов 2 выполнен с диаметром, равным толщине направляющей 1...
Система экстремального регулирования электронно-лучевым вентилем

Номер патента: 938257
Опубликовано: 23.06.1982
МПК: G05B 13/00
Метки: вентилем, экстремального, электронно-лучевым
...Ор. Состояние компаратора 2не изменяется, так как разность аОостается положительной. Поэтому вто"рой импульс с генератора 5, поступаячерез элементы И 6 и ИЛИ 8 на входсчетчика 11, изменит состояние триггера второго разряда, напряжение навыходе 13 и 14 уменьшается. Далеепроцессы повторяются.После каждого переключения очередного триггера регистра, напряжение управления вентилем 16 уменьшается. При этом уменьшается и величина ЬО, стремясь к нулевому значению. В момент Ц, когда ьО = 0 и напряжение источника 14 достигает значения О, потери мощности будут минимальными Р = Рп (точка 2, фиг. 3), компаратор 2 переходит в другое состояние, запрещая через элемент И 6 прохождение импульсов на вход счетчика. В системе регулирования...
Экстремальный регулятор для объектов с транспортным запаздыванием

Номер патента: 941929
Опубликовано: 07.07.1982
Авторы: Кубанцев, Спиридонов
МПК: G05B 13/00
Метки: запаздыванием, объектов, регулятор, транспортным, экстремальный
...четвертого триггера сое" динен со вторым входом первого коммутатора.На чертеже показана структурная схема предлагаемого устройства.К выходу объекта 1 управления под" ключен датчик 2 регулируемого сиг" .55 нала, выход которого подсоединен к первому дифференциатору 3, выходной сигнал которого одновременно подает-. ся на второй дифференциатор 4:и на .первый вход сумматора 5. На третий Щ вход сумматора 5 поступает сигнал источника 6 опорного напряжения, С выхода сумматора 5 сигнал подается на вход первого преобразователя 7 напряжение - временной интервал, с 5 выхода которого через первый комму=татор 8, второй триггер 9 и третийтригге 1 10 сигнал подается иа первыйвход элемента И 11. С выхода источника 12 регулируемого опорного сигнала,...
Система автоматической оптимизации

Номер патента: 951237
Опубликовано: 15.08.1982
Авторы: Бобух, Бодянский, Жаков, Зайцев, Илюнин
МПК: G05B 13/00
Метки: автоматической, оптимизации
...записываются в ячейки второго блока памяти 3, После формирования (1+1)-го воздействия блок планирования эксперимента 8 отключается, при этом командный блок 9 отключается по первому входу и открывается по второму входу, во всех ячейках блоков памяти 3 и 6 записаны соответствующие значения факторов и откликов. Это состояние является исходным для осуществления собственно процесса оптимизации, который начинается в момент подачи команды со второго выхода командного блока 9 на второй вход анализатора выхода объекта 4. По этой команде включается анализатор .выхода объекта 4, который, осуществляя сравнение записанных в ячейках второго блока памяти 3 значений откликов у, выделяет наихудший излоткликов уо, Выделенное значение уо подается на...
Регулятор с переменной структурой

Номер патента: 954929
Опубликовано: 30.08.1982
Авторы: Виноградов, Пучков, Сабуров, Савинов, Соболев
МПК: G05B 13/00
Метки: переменной, регулятор, структурой
...переключения, и ограничителя, выход которого соединен со вторым входом сумматора.Такое подключение интегральной цепи сводит к нулю в установившемся режим смещение характеристик составных элементов, охваченных ею.Введение ограничения по сигналу ин тегральной цепи обеспечивает большую эффективность ее при малых рассогласованиях системы, т.е. непосредственно п вышение точности, а при больших рассогласованиях сохранение такой эффективности нежелательно вследствие усилени колебательных режимов и усиления отмеченного недостатка известного регуля- З 0 тора. Устранение этого недостатка известного регулятора и повышение устойчивости достигается предлагаемой схемой формирователя линии переключения, Такое его построение определяет нелиней- З 5...
Цифровой корректор статической и динамической характеристик инерционного измерительного преобразователя

Номер патента: 954930
Опубликовано: 30.08.1982
Авторы: Агамиров, Арутюнов, Круашвили
МПК: G05B 13/00
Метки: динамической, измерительного, инерционного, корректор, преобразователя, статической, характеристик, цифровой
...7, исполь- фзующим известную функциональную зависимость коэффициента передачи от выходного сигнала преобразователя и соответствующей физической величины. Для этого выходной сигнал с соответствующегодатчика физической величи ны подводятна соответствующий вход цифрового функционального преобразователя,Предлагаемое устройство позволяетповысить точность измерения, если иэме 1кение входного измеряемого сигнала предложить в видеФХЦ-Хоф ос -) фл 1 т26при котором входной сигнал будет аппроксимирован полиномом второго порядка Вэтом случае параметры ХО,1 и , определяют при помощи соответствующихдетерминантов дх д , д , д, При этом 2 удетерминанты оказываются с пятью строками и столбцами в отличие от рассмотренных выше детерминантов с...
Самонастраивающаяся система управления металлорежущим станком

Номер патента: 954931
Опубликовано: 30.08.1982
Авторы: Дмитриев, Заковоротный, Палагнюк, Турчин
МПК: G05B 13/00
Метки: металлорежущим, самонастраивающаяся, станком
...изобретения Самонастраивающаяся система управления металлорежущим станком, содержащая электромеханический преобразователь, на волноводе которого закреп. лена обрабатываемая деталь, входом связанный с выходом усилителя мощности, и датчик вибрации, установленный на режущем инструменте, выход которого соединен с первым усилителем и с первым входом второго усилителя, второй вход которого подключен к выхо ду первого усилителя, о т л и ч а ющ а я с я тем, что с целью повышения точности и надежности, в нее введены сумматор, третий усилитель, полосовые фильтры, усилители с зоной нечувствительности и детекторы, причем выход датчика вибрации через соответствующие последовательно соединенные полосовой фильтр, усилитель с зоной нечувствительности...
Система экстремального регулирования

Номер патента: 974338
Опубликовано: 15.11.1982
Авторы: Алпатов, Бондарь, Гишихтер, Городецкий
МПК: G05B 13/00
Метки: экстремального
...первого блока сравнения 9. Первый выход первого блока сравнения 9 соединен с информационным входом второго переключателя 10, выход которого соединен со входом второго блока памяти 11, является неустойчивая работа в обстанов двумя выходами соединенного с соответствуюшими входами второго блока сравнения 12, выход которого соединен с управляющим входом третьего переключателя 13. С первым информационным входом третьего переключателя 13 соединен первый выход первого блока сравнения 9, а со вторым информационным входом - выход источника максимального сигнала 14, выход третьего переключателя соединен с информационным входом блока реверса 15, управляющий вход которого соединен со вторым выходом первого блока сравнения 9, а выход - с...
Устройство для управления синхронно перемещающимися механизмами станка

Номер патента: 985760
Опубликовано: 30.12.1982
Авторы: Авдушев, Борцов, Васильев, Гольдшмид, Демидов, Кунин, Поляхов, Путов
МПК: G05B 13/00
Метки: механизмами, перемещающимися, синхронно, станка
...двухпеременных движения механизма (скорость и ускорения), выполненный на усилителях 29 - 34 (фиг, 3).Блок 12 масштабных коэффициентоввыполнен в виде суммирующего операционного усилителя с тремя входами, по каж- Б дому иэ которых реализован коэффициентусиления, выбираемый иэ соображений устойчивос тиеНелинейный усилитель 13 выполнен наоперационном усилителе, например К 140, 0 в цепь обратной связи которого введенынелинейные элементы (фиг, 4 а). Нафиг, 4 б представлена статическая характеристика усилителя.Регуляторы 1 и 14 положения реали зованы на операционных усилителях и являются ПИ-регуляторами.Ъ 985ходов эталонной модели 7. Второй выходэталонной модели 7 подключен на один ювходов второго блока 10 сравнения, к второму входу которого...
Квазиоптимальная по быстродействию система управления

Номер патента: 987575
Опубликовано: 07.01.1983
Автор: Лащев
МПК: G05B 13/00
Метки: быстродействию, квазиоптимальная
...).Для обеспечения 90 необходимо,чтобы. И М дР сИ д 1 так как составлякщие в левой и правой частях имеют разные знаки.д)Если .в 11) и 13) положитьа а - - определяется только входнымдЯсигналом х (1). Эадача контура настройки в таком случае - компенсация динамической ошибки е. Повышая скорость и величину составляющей в левой. части уравнения 13) можно обеспеЪить малую зависимость составляющей .д - в правой части, а значитЗФи зависимость переходного процесса от характеристик входного сигнала х 1),Предложенное техническое решение решает задачу обеспечения кваэиоптимального по быстродействию переходного процесса апериодического характера в классе градиентных самонастраивающихся систем.Потребуем, чтобы обеспечивалось...
Самонастраивающаяся система управления
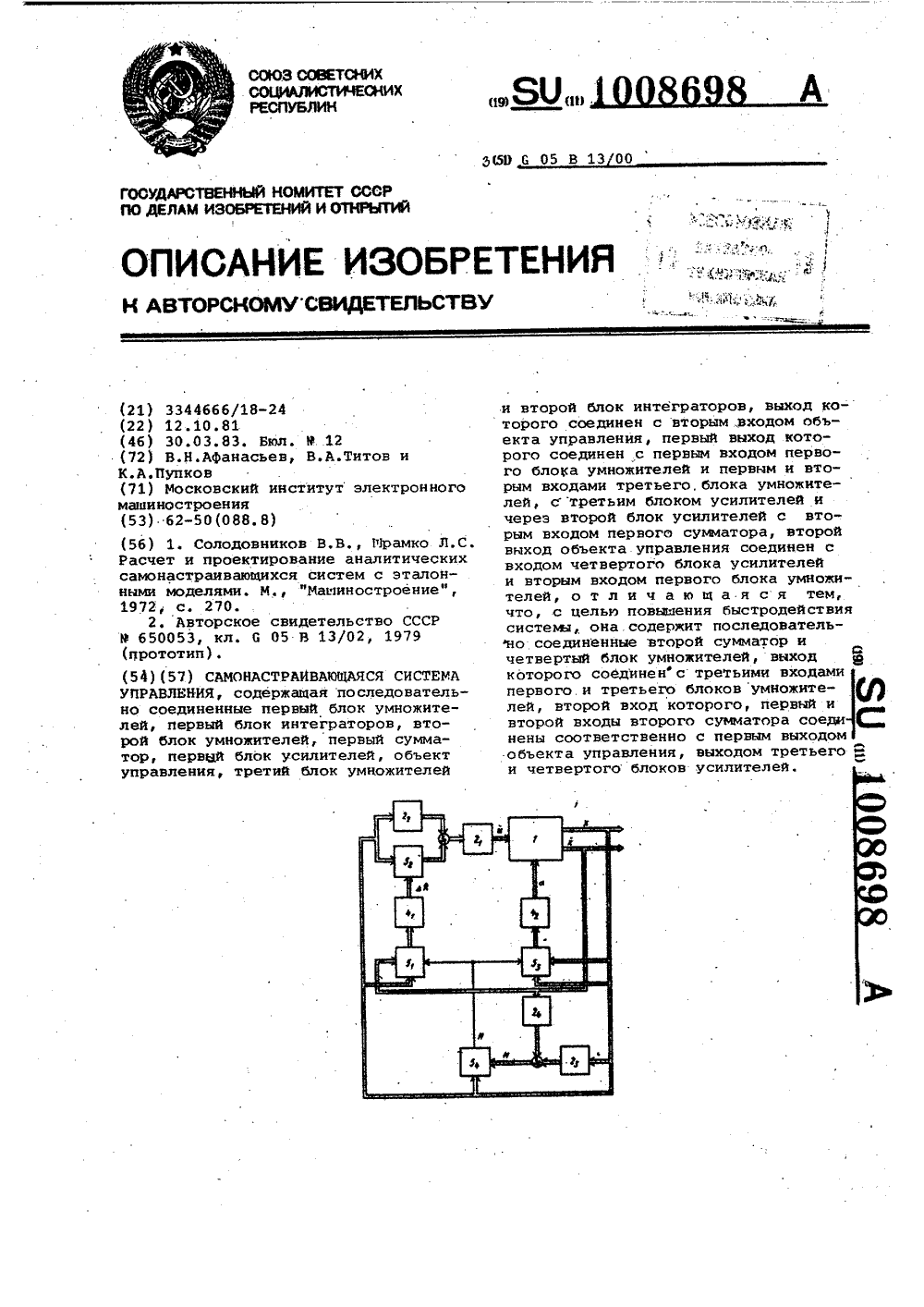
Номер патента: 1008698
Опубликовано: 30.03.1983
Авторы: Афанасьев, Пупков, Титов
МПК: G05B 13/00
Метки: самонастраивающаяся
...ныходом третьего и четвертогоблоков усилителей.Блоками умножителей, интеграторов и усилителей являются параллельные соединения соответственно умножителей, интеграторов, усилителей сосвоими коэффициентами,На чертеже представлена блок-схема самонастраивающейся системы управленияНа чертеже обозначены объект 1управления, первый, второй, тре 1 ий ичетвертый блоки 2, 22, 2 и 24 усилителей, первый и второй сумматоры3 и З, первый и второй блоки 4 и4 интеграторов, первый, второй, третий и четвертый блоки 5, 5 у, 5 и54 умножителей, первая и вторая выходные координаты х и х объекта управления, выходные сигналы И, 0 второго сумматора 3 и первого блока 2усилителей, выходной сигнал Н четвертого блока 54 умножителей, выходныесигналы д 1, Ж...
Релейно-линейный регулятор

Номер патента: 1012200
Опубликовано: 15.04.1983
Автор: Фаворский
МПК: G05B 13/00
Метки: регулятор, релейно-линейный
...основана на том, что длительность интервалов знакопостоянства управления зависит от начальных условий процесса приведения. Чем меньше состояние объекта отличается от состояния, определяемого конечной точкой приведения, тем меньше время каждого из И интервалов оптимального приведения, а при увеличении рассогласования между начальной и конечной точками, время хотя бы одного любого интервала должно увеличиваться. Поэгому, оценивая время каждого из И интервалов, можно оценить удаленность состояния объекта от конечной точки приведения, т. е, задать область в-мерном пространстве, при попадании в которую целесообразно переключать управление на линейное.200 4чину полупериода автоколебаннй. Первыйинтегратор 7 н первый компаратор 8 определяют ,...
Система управления

Номер патента: 1024877
Опубликовано: 23.06.1983
Авторы: Борцов, Пахомов, Пашков, Юнгер
МПК: G05B 13/00
...дифференцированияподключен к входу блока выделениямодуля,На чертеже изображена структурнаясхема предлагаемой системы управления40 Система автоматического управления содержит первый сумматор 1, первый 2 и второй 3 блоки дифференциро вания, блок 1 выделения модуля, второй сумматор 5 элемент переменной45 структуры 6, блок опорного напряжения 7 и объект управления 8.Предлагаемая система управленияреализует функцию управления в виде- координата системы послелинейного неособого преобразования;- входной сигнал задания0,Ф - равномерности векторасостояния системы и .век"тора управления соответственно.Система управления работает сле" дующим образомВходной сигнал Ч через сумматор 1 передается на первый вход элемента переменной структуры 6 и...
Релейный регулятор

Номер патента: 1029139
Опубликовано: 15.07.1983
Автор: Фаворский
МПК: G05B 13/00
...уже в (1+2) -м мерном пространстве (хх 2, 1 э) и пРоектиРУетсЯ гипеРповеРхность оптимального переключения на (1+1)-мерное подпространство (х,. х 1+,т )э. Таким орраэом получается к-мерная гиперповерхность переключения в (1+1) -мерном подпространстве, размерность которого определяется по количеству сигналов хх и й . Гиперповерхность переключения реализуется в функциональном преобразователе зависимостьюГ (хх.1йУ ) ОРеализация этой гиперповерхности требует постановки на объект управления датчиков и дополнительной обработки сигналов с целью полученияДалее для наглядности рассмотрим работу регулятора в случае колебательного объекта второго порядка без демпфирования. На фиг. 2 приведена линия оптимального переключения в пространство параметров...
Устройство для программирования скорости

Номер патента: 1030770
Опубликовано: 23.07.1983
Авторы: Баринберг, Измайлов, Конегуб, Фурсов
МПК: G05B 13/00
Метки: программирования, скорости
...35 40 45 50 55 б 0 65 соединен с выходом второго звена ограничения, и выход второго интегратора соединен с входом второго блока сравнения, причем первый вход . второго блока сравнения является входом функционального преобразователя, а выход сумматора является выходом Функционального преобразователя.На Фиг. 1 показано устройство для программирования скорости; на фиг, 2 и 3 - примерные тахограммы работы привода подъемной машины в режиме замедления соответственно при торможении с неизменным ускорением и при использовании предлагаемого устройства программирования скорости; на фиг, 4 - блоксхема функционального преобразователя.Устройство содержит управляемый ключ 1, блок 2 сравнения, звено 3 ограничения, интератор 4, датчик 5 нагрузки...
Многоканальное устройство определения максимумов

Номер патента: 1032426
Опубликовано: 30.07.1983
Автор: Закирьянов
МПК: G05B 13/00
Метки: максимумов, многоканальное
...канала, а выходыамплитудных компараторов 1 +1 и 1 - 1каналов соединены через соответствующий элемент ИЛИ со вторым входомтриггераканала.На чертеже представлена функциональная схема многоканального устрой"ства определения максимумов,Многоканальное устройство определения максимумов содержит синхронизатор 1 инверторы 2, амплитудные компараторы 3, триггеры 4, элементы И5 и элемвнты ИЛИ 6.Рассмотрим работу устройства дляслуцая трех каналов 1 обработки Щ ).Пусть на вход устройства поступаютПОСТОЯННЫЕ наПРЯжЕНИЯ 02 0 0 .Синхронизатор выдает на управляющие входы интеграторов строб. На со 32126ответствующие сигнальные входы интеграторов поступают напряжения Ц ,Я,0, Во время действия строба на выхо-,дах интеграторов напряжение линейнонарастает...
Следящий привод

Номер патента: 1049864
Опубликовано: 23.10.1983
Автор: Васильев
МПК: G05B 13/00
...кроме медленно меняющейся ошибки от параметрического возмущения, поступает и нескомпенсированная часть ошибки системы по управляющему и возмущающему воздействию.Цель изобретения - упрощение привода и повышение качества регулирования путем повышения эффективности самонастройки по параметрическим возмущениям при сохранении запаса устойчивости системы;Поставленная цель достигается тем, что в следящий привод, содержащий последовательно соединенные задатчик, первый блок сравнения, регулятор положения, сумматор второй блок сравнения, привод, подключенный к объекту управления, датчик положения объекта, выход которого подключен к второму входу первого блока сравнения, выход привода через датчик скорости соединен с вторым входом второго блока...
Устройство для управления электроприводом

Номер патента: 1061105
Опубликовано: 15.12.1983
Авторы: Борцов, Булавин, Кузнецов, Пахомов, Юнгер
МПК: G05B 13/00
Метки: электроприводом
...сумматора,выход релейного элемента подключенк третьему входу второго сумматора,причем выход звена с пропорционально-интегральной характеристикойсоединен с вторым входом второгосумматора и с четвертым входомпервогосумматора, а вход с первымвходом устройства.На чертеже изображена блок-схемаустройства для управления электро.приводом.Устройство содержит эталоннуюмодель 1, первый сумматор 2, первыймасштабный усилитель 3, нелинейныйэлемент 4, второй сумматор 5, интегратор б, второй масштабный усилитель 7, звено с пропорциональноинтегральной характеристикой 8, блоксравнения 9, релейный элемент 10,фильтр 11.Устройство для управления электроприводом работает следующим образом,Задающий сигнал, поступающий напервый вход устройства и...
Устройство для оптимальной компенсации случайных сигналов

Номер патента: 1064270
Опубликовано: 30.12.1983
Авторы: Денщиков, Муратова, Мясоедов, Тимофеев
МПК: G05B 13/00
Метки: компенсации, оптимальной, сигналов, случайных
...сигналов, позволяет использовать эффективным образом предлагаемое устройство в .ка" честве автоматического (адаптивного) компенсатора случайных сигналов. На фиг.1 приведена блок-схема предлагаемого устройства; на фиг.2 - блок-схема уеилителя; на фиг.З зависимость величины дисперсии помехи от величины коэффициента корреляции.(б) Устрбйство содержит первый 1 и второй 2 усилители, сумматор 3, умножитель 4, фильтр 5 и интегратор б.Усилитель 2 содержит операционный усилитель 7, резисторы 8 и 9 и полевой транзистор 10.В качестве усилителей 1 и 2, выполненных по схеме с автоматической регулировкой усиления, может быть использован операционный усилитель типа 284 УД 1. В качестве усилителя 2 с переменным коэффициентом усиления используется...
Устройство для определения экстремума

Номер патента: 1070505
Опубликовано: 30.01.1984
Авторы: Коломиец, Нечипоренко, Резвицкий, Сметанин
МПК: G05B 13/00
Метки: экстремума
...управления, содержащий первый б,второй 7, третий 8 и четвертый 9элементы И и первый 10 и второй 11триггеры, формирователь 12 импульсов, о четвертых элементов 13 И-НЕ,первых. 14 и вторых 15 инверторон и и элементов И 1 б, входныеи выходные шины 17-23.На фиг. 2 показаны временныедиаграммы работы устройства дляопределения экстремума, где изображены: 24 - управляющие импульсыАЦП, 25 - тактовые импульсы, поступающие на шину 22 тактовых импульсон, 26 - импульсы разрешения состаршего разряда, поступающие нашину 18 разрешения определения экстремума, 27 - цифровой код, поступающий на входную шину 17; 28сигнал иа прямом выходе 3 -триггера 1; .29 - уровень сигнала на выходе элемента И-НЕ 2; 30 - уровеньсигнала на выходе элемента И-НЕ 3,31 - уровень...
Адаптивная система управления

Номер патента: 1071996
Опубликовано: 07.02.1984
Авторы: Бобух, Бодянский, Дьяченко, Зайцев, Руденко, Салыга, Сидревич
МПК: G05B 13/00
Метки: адаптивная
...инФормацияс ныходов о и Ь сдвоенного блока 11умножения, у которого первая группана основании информации, поступающейс выхода сумматора ошибки идентификации б и выхода сумматора 1 объекта,вычисляет значение ( У -)к, а втораягруппа на основании информации, поступающей с сумматора 8 ошибки управления, блока 17 задания стоимости60 управляющих воздействий и выхода сум 65 На чертеже изображена блок-схема предлагаемой адаптивной системы управления для варианта нестационарного многомерного объекта управления свходами и одним выходом.Адаптивная система управления содержит сумматор 1 объекта, объект 2 управления, модель 3 объекта управления, блок 4 задержки модели, сумматор 5 модели, сумматор б ошибки идентификации, блок 7 управления,...
Устройство для регулирования режимов вулканизации изделий

Номер патента: 1091118
Опубликовано: 07.05.1984
Авторы: Курманов, Пороцкий, Сытник
МПК: G05B 13/00
Метки: вулканизации, режимов
...в реальном масштабе времени. Первая и вторая сеточные модели 6 и 8 представляют собой отдельные части одной сеточной модели, моделирующей эти условия в ускаренном масштабе времени. При этомпервая сеточная модель 8 отображаетизменение температур в области изделия от диафрагмы до какой-то внутреннейточки А, для которой Т (Ъ) задано. температурные условия в области между внешней поверхностью изделия иточкой А. Таймер 16 определяет периодработы первой и второй сеточных моделей 6 н 8. В первый полупериод работы таймера 16 сеточные модели 6 и 8переходят в режим НУ-ввода начальных условий, при котором в узлойые точки 3109затора тока, второй управляемый стабилизатор тока и вторую сеточную модель, первый вход которой подключенк первому датчику...
Адаптивная оптическая система

Номер патента: 1097970
Опубликовано: 15.06.1984
МПК: G05B 13/00
Метки: адаптивная, оптическая
...сигнал фазовой ошибки на выходе ФНЧ в каждом канале зависит только от разности фаз ( би- бо)Однако обеспечить полную идентичность адаптивных сигналов и постоянство коэффициента усиления в каждом канале на протяжении продолжительного времени работы в реальных условиях трудно, Поэтому в реальном случае имеется сигнал ошибки, состоящий из двух компонент:усилитель, сумматор, блок сравненияи блок деления, первый вход которого соединен с выходом блока сравнения,а второй вход - с выходом сумматора,первый вход которого соединен с выходом первого Фильтра нижних частот,с первым входом блока сравнения ивторым входом первого Фазового модулятора, выход второго фильтра нижних частот подключен через унравляемый усилитель к вторым входам сумматора,...
Способ коррекции погрешности уравновешивающего преобразования физических величин

Номер патента: 1107107
Опубликовано: 07.08.1984
Автор: Грудев
МПК: G05B 13/00
Метки: величин, коррекции, погрешности, преобразования, уравновешивающего, физических
...адаптирующей обратной связью,-обуславливается произведением усилений в контуре уравновешивания и в петле адаптирующей обратной связи. Временное разделение каналов преобразования определяет недостаточное быстродействие коррекции и возникновение динамической составляющей погрешности преобразования,Цель изобретения - повышение точности коррекции.Цель достигается тем, что согласч но способу коррекции погрешности уравновешивающего преобразования физических величин, основанному на формировании корректирующего сигнала в контуре уравновешивания, в контур уравновешивания вводят дополнительный корректирующий сигнал, образованный сравнением, например, по фазе исходного корректирующего сигнала с сигналом в контуре...
Самонастраивающаяся система управления

Номер патента: 1109713
Опубликовано: 23.08.1984
Автор: Ходько
МПК: G05B 13/00
Метки: самонастраивающаяся
...сигналы, пропорциональные требуемым приращениямнастраиваемых параметров. Недостаткомтаких систем является то, что модель чувствительности не является настраиваемой,поэтому точность, быстродействие и надежность самонастройки низки.Из известных аналогов наиболее близкими к предлагаемому является самонастраивающаяся система, состоящая из собственно настраиваемой системы, эталонной модели, сравнивающего устройства, вычислительного устройства, каналов настройкисистемы и модели чувствительности. В состав вычислительного устройства входят интегрирующие звенья и множительные устройства, входы которых соединены с выходами соответствующих сравнивающих устройств и выходами модели чувствительности,Выходы настраиваемой системы и...
Система управления

Номер патента: 1112344
Опубликовано: 07.09.1984
МПК: G05B 13/00
...особенностей оптимальноеуправление с амплитудно-импульсноймодуляцией не представляется возможным или является нецелесообразным,и требуется управление осуществлятьс использованием широтноимпульсноймодуляции (ШИИ).Целью изобретения является расширение области применения путем формирования оптимального управления сиспользованием широтно-импульсной модуляции.1 Указанная цель достигается тем, что в систему управления, содержащую .датчик измеряемого параметра, подклю ченный входом к выходу объекта управления, дискретизатор, соединенный входом с выходом датчика измеряемого параметра, а выходом - с входом регулятора с амплитудно-импульсной модуляцией и первым входом идентификатора, второй вход которого соединен с выходом регулятора с...
Система регулирования температуры печи
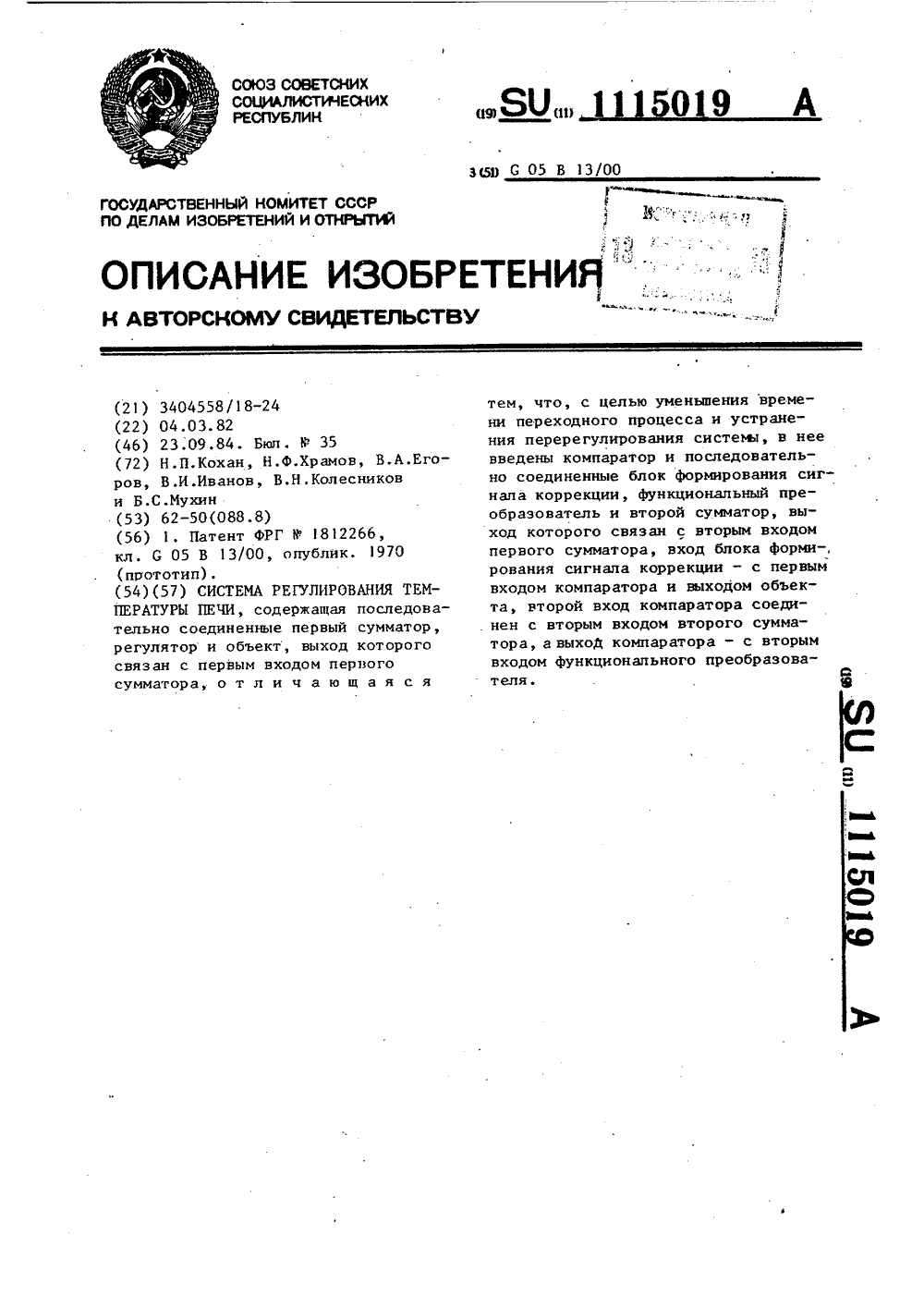
Номер патента: 1115019
Опубликовано: 23.09.1984
Авторы: Егоров, Иванов, Колесников, Кохан, Мухин, Храмов
МПК: G05B 13/00
Метки: печи, температуры
...- с вторымвходом функционального преобразователя,На чертеже приведена блок-схема 4 Опредлагаемой сиСтемы.Система состоит из первого сумматора 1, регулятора 2, объекта 3,блока 4 формирования сигнала коррекции, функционапьного преобразователя455, второго сумматора 6 и компаратора 7. Первый сумматор 1, регулятор2 и объект 3 охвачены отрицательной обратной связью, образуя основной контур системы. Выход объекта 3 соединен с входом блока 450формирования сигнала коррекции, выход которого связан с входом функционального преобразователя 5. Выходфункционального преобразователя соединен с первым входом второго сумматора 6 выход которого связан с вто рым входом первого сумматора 1. Первый вход компаратора 7 связан с вы 19 2ходом объекта 3 и первым...
Система управления

Номер патента: 1120283
Опубликовано: 23.10.1984
Авторы: Борцов, Завернихин, Кузнецов, Малютин, Николаев, Поздняков, Поляхов, Путов
МПК: G05B 13/00
...подблоков(Интеграторов), вырабатывающих переменные объекта. При этом его работарассчитана на линейность и стационарность характеристик объекта, и приизменении параметров и отклонении отлинейности объекта вырабатываемыеидентификатором 10 оценки переменныхотклоняются от их действительных значений, С целью согласования поведенИя идентификатора с нелинейными нестационарным объектом и, такимобразом, получения точных оценокпеременных объекта вводится контуркоррекции идентификатора, подчиняющего движение идентификатора движениюобъекта, Коррекция осуществляетсяконтуром, образованным измерителем 7ошибки, формирователем 8 сигнала коррекции и блоком 9 масштабных коэффициентов. В измерителе 7 ошибки сравниваются сигналы переменной, непосредственно...
Способ экстремального регулирования инерционных объектов с транспортным запаздыванием

Номер патента: 1125601
Опубликовано: 23.11.1984
Автор: Казакевич
МПК: G05B 13/00
Метки: запаздыванием, инерционных, объектов, транспортным, экстремального
...качества регулирования и быстродействия поиска экстремума,Поставленная цель достигаетсятем, что сигнал производной выходного воздействия задерживают на время транспортного запаздывания объекта, формируют сигнал управляющего.воздействия, ограничивают его до нуля и. и момент поступления сигналапроизводной выходного воздействияфбрь 1 ируют управляющий сигнал, полярность которого совпадает с полярностью сигнала производной, а в случае равенства нулю сигнала производной сохраняют полярность управляющего сигнала. На фиг. 1 представлена блок-схемасистемы, реализующей предлагаемыйспособ экстремального регулирования; на фиг. 2 - графики, иллюстрирующие предлагаемый способ,Система содержит инерционныйобъект 1, устройство 2 формированиясигнала...