Система автоматической оптимизации
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
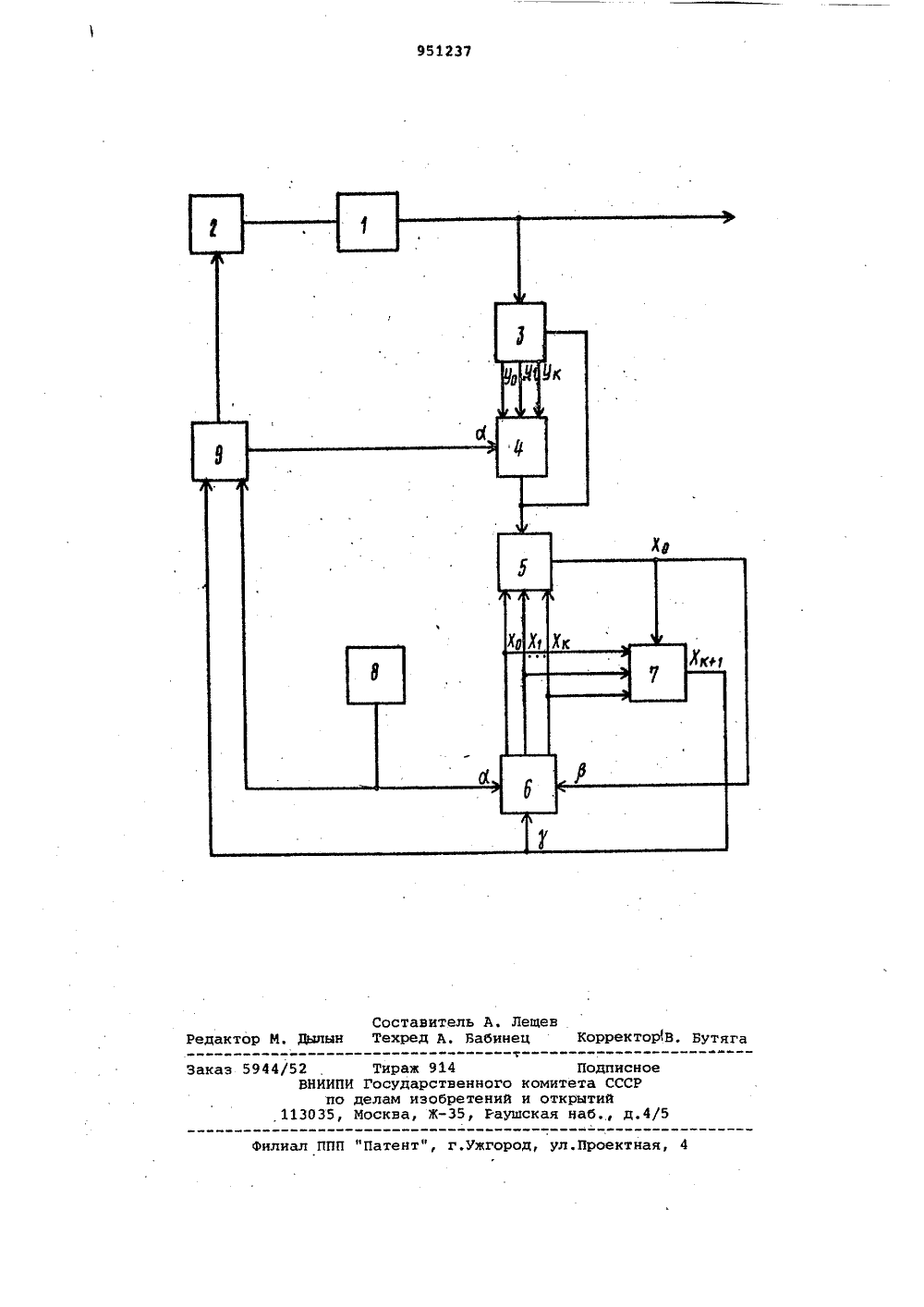
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскикСоциалистическихРеспублик и 1 951237(22) Заявлено 19.01.81(21) 3238868/18-24 131) М. Кп. с присоединением заявки Мо(23) Приоритет 6 05 В 13/00 Государственный комитет СССР но делам изобретений и открытий(54) СИСТЕМА АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ Изобретение относится к технической кибернетике и предназначено, для автоматического поддержания оптимальных режимов работы многомерных стохастических объектов управления с изменяющимися характеристиками.Известна система экстремального управления, содержащая корректор, первые выходы которого соединены с входами объекта, и. блок определения характеристик объекта, осущесьвляющий построение математической модели объекта управления 1 11.Недостатком данной системы является невысокое быстродействие, объ ясняющееся тем, что определение оптимальных режимов осуществляется в два этапа: идентификация и собственно оптимизация.Наиболее близким техническим решением является система автоматической оптимизации, содержащая анализатор выхода объекта, первый блок памяти и последовательно соединенные блок планирования эксперимента, команд ный блок, регулятор, объект управления и второй блок памяти 2.Недостатком известной системы является невысокое быстродействие системы, вытекающее из того, что про- ЗО цесс поиска оптимальных режимов складывается из трех этапов: накопления информации, построения математической модели объекта управления и собственно оптимизации. Схемная реализация данного подхода к задаче оптимизации приводит к структурной избыточности реализующего его устройства и необходимости использования блоков памяти, большой емкости, что также ведет к снижению быстродействия.Цель изобретения - повышение быстродействия системы автоматической оптимизации.Поставленная цель достигается тем, что в устройство введены последовательно соединенные анализатор входа объекта и сумматор, выход которого соединен с первым входом первого блока памяти и со вторым входом командного блока, вторые входы - с соответствующими выходами первого блока памяти и соответствующими первы. ми входами анализатора входа объекта, второй вход которого соединен со вторым входом второго блока памяти и с выходом анализатора выхода объекта, а выход - со вторым входом первого блока памяти, третий вход ко 951237торого соединен с выходом блока пла= нирования эксперимента, выходы второго блока памяти соединены с соответствующими первыми входами анализа. тора выхода объекта, второй вход которого соединен со вторым выходом командного блока.Таким образом, предлагаемая система реализует последовательный симплекс-метод отыскания экстремума статической иарактеристики объекта уп О равленияк1( =-Х," - ,;Хк 1Х 1.где х - наихудшая (отражаемая) вершина симплексахк - отраженная вершина симплексарХ.,-1 к- множество вершин симплексаза исключением наихудшей;к- размерность пространствафакторов.Благодаря ис;пользованию последовательного симплекс-метода, являюшегося алгоритмом ацаптационной оптимизации промьыленных технологических обьектов, предлагаемая системане производит построения математической модели, осуществляя оптимизациюнепосредственно на объекте, что позволяет сократить время поиска оптимальных режимов. Кроме тоГо, системареализующая последовательный симплекс-метод не производит пробныхшагов для определения направлениядвижения (каждый шаг является рабочим), позволяет оптимизировать стохастические объекты (последовательный симплекс-метод в силу своей непараметричности является помехоустойчивой процедурой), отслеживать дрейпараметров, требует небольшой емкости блока памяти (к+1 ячеек).На чертеже представлена блок-схема системы,Блок-схема системы содержит обьектуправления 1, регулятор 2, второйблок памяти 3, анализатор выходаобъекта 4, анализатора входа объекта 5, первый блок памяти б, сумматор7, блок планирования эксперимента 8,командный блок 9.50Система работает следующим образом,В исходном состоянии в ячейкахвторого блока памяти 3 и первогоблока памяти б записаны нули, на первом и втором входах командного блока 9 также нули. В момент пуска блокпланирования эксперимента 8 начинаетформировать входные воздействия хсогласно матрице насыщенного планаэксперимента (симплекс-план), которые по третьему входу записываютсяв первый блок памяти б, а также подаются на первый вход командногоблока 9, являющегося по сути коммутатором, включающим первый или второйб 5 входы на выход. Через регулятор 2, преобразующий сигналы системы в Физические воздействия, х подаются на объект управления 1. Соответствующие отклики объекта у. по первому входу записываются в ячейки второго блока памяти 3, После формирования (1+1)-го воздействия блок планирования эксперимента 8 отключается, при этом командный блок 9 отключается по первому входу и открывается по второму входу, во всех ячейках блоков памяти 3 и 6 записаны соответствующие значения факторов и откликов. Это состояние является исходным для осуществления собственно процесса оптимизации, который начинается в момент подачи команды со второго выхода командного блока 9 на второй вход анализатора выхода объекта 4. По этой команде включается анализатор .выхода объекта 4, который, осуществляя сравнение записанных в ячейках второго блока памяти 3 значений откликов у, выделяет наихудший излоткликов уо, Выделенное значение уо подается на второй вход второго блока памяти 3, где стирается в соответствующей ячейке, а также на второй вход анализатора входа объекта 5. По этому сигналу анализатор входа объекта 5 выделяет вектор факторов х, соответствующий данному отклику уо, и подает его на второй вход первого блока памяти входа б, где соответствующая ячейка зануляется. Выделенный х подается ча первый вход сумматора 7, на входы которого подаются также все значения Х . Сумматор 7 вычисляетлК ЪМК+1 о Ко 1 0;ллпоскольку в ячейке, соответствующей Х, записаны нули. Вычисленное значение Ч к+ с выхода сумматора 7 подается на первый вход первого блока памяти б, где записывается в свободную ячейку. Этот сигнал подается через второй вход командного блока 9 на регулятор 2, который подает соответствующее воздействие на вход объекта управления 1. Соответствующая реакция у, записывается в свободную ячейку второго блока памяти 3, На этом первая итерация заканчивается, Вторая итерация осуществляется аналогично первой и начинается с подачи командного импульса со второго выхода командного блока 9 на вто-. рой вход анализатора выхода объекта 4. По этой же команде анализатор выхода объекта 4 выделяет очередное наихудшее значение отклика, которое затем затирается во втором блоке памяти 3 и подается на анализаторвхода объекта 5, которнй выделяет соответствующий этому отклику вектор факторов К . Это значение стирается в соответствующей ячейке первого блока памяти 6 и вместе с остальными значениями факторов 1 подается на 5 сумматор 7. Сумматор 7 вновь вычисляет улучшенный набор Факторов, который записывается в свободную ячейку первого блока памяти б и через командный блок 9 и регулятор 2 подается на объект управления 1, Последующие итерации осуществляются аналогично предыдущим.Такимобразом, в процессе работы системы осуществляется отражение симплекса и происходит последовательное улучшение откликов объекта. В окрестности экстремума происходит заклинивание симплекса в области оптимального режима, если же экстремум объекта дрейФует, то система отслеживает 20 этот дрейф.Предлагаемая система может быть выполнена на унифицированных элементах и обладает конструктивной простотой, что объясняется тем, что в процессе оптимизации в ней осуществляются простейшие операции типа сложения, сравнения, записи числа в ячейку и его стирания. По сравнению с известными предлагаемая система облада- Зр ет повышенным быстродействием, конструктивной простотой, помехоустойчивостью, что позволяет решать задачи экстремальной оптимизации нестационарных объектов, подверженных воз-З ,действию помех. Система позволяет сократить время проведения процесса, уменьшить расход реагентов, повысить выход готовой продукции, что дает воэможность снизить ее себестоимость и повысить рентабельность производст О ва в целом, По сравнению с базовым объектом предлагаемая система оптимизации применительно к производству кальцинированной соды аммиачным методом позволяет уменьшить расходы.очищенного рассола на 0,002 м /т со-,Ъды; извести на 0,2 кг/т соды; парана 0,0003 Гкал/т соды и ряда другихреагентов, что приводит к снижениюсебестоимости готовой продукции на0,005 р/т соды.Формула изобретенияСистемаавтоматической оптимизации, содержащая анализатор выходаобъекта, первый блок памяти и последовательно соединенные блок планирования эксперимента, командный блок,регулятор, объект управления и второй блок памяти, о т л и ч а ю щ а -я с я тем, что, с целью повышениябыстродействия системы, в нее введены последовательно соединенные ана-лизатор входа объекта и сумматор,выход которого соединен с первымвходом первого блока памяти и с вторым входом командного блока, вторые входы - с соответствующими выходами первого блока памяти и соответствующими первыми входами анализатора входа объекта, второй вход которого соединен с вторым входомвторого блока памяти и с выходом анализатора выхода объекта, а выход -с вторым входом первого блока памяти, третий вход которого соединен свыходом блока планирования эксперимента, выходы второго блока памяти соединейы с соответствующими первыми входами анализатора выхода объекта,второй вход которого соединен с вторым выходом командного блока.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9 651314, кл. С 05 В 13/02, 1979.2. Авторское свидетельство СССРР 451056, кл. О 05 В 13/ОО, 1974951237 ев Составитель А. Лещн Техред А. Бабинец Корректор 1 В. Бутяг едак аказ атент" Филиал Уж ул. Проектная,4/52 Тира ВНИИПИ Госуд по делам 113035, Москва914 Подписноественного комитета СССРобретений и открытийЖ, Раушская наб., д.4/
СмотретьЗаявка
3238868, 19.01.1981
ПРЕДПРИЯТИЕ ПЯ А-3732, ХАРЬКОВСКИЙ ИНСТИТУТ РАДИОЭЛЕКТРОНИКИ
БОБУХ АНАТОЛИЙ АЛЕКСЕЕВИЧ, БОДЯНСКИЙ ЕВГЕНИЙ ВЛАДИМИРОВИЧ, ЖАКОВ ВИКТОР СТЕПАНОВИЧ, ЗАЙЦЕВ ИВАН ДМИТРИЕВИЧ, ИЛЮНИН ОЛЕГ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: автоматической, оптимизации
Опубликовано: 15.08.1982
Код ссылки
<a href="https://patents.su/4-951237-sistema-avtomaticheskojj-optimizacii.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматической оптимизации</a>
Устройство для стохастического контроля микропроцессорных цифровых блоков

Номер патента: 1725222
Опубликовано: 07.04.1992
Авторы: Жданов, Кочин, Мардаре
МПК: G06F 11/08
Метки: блоков, микропроцессорных, стохастического, цифровых
...рования воздействий и приема результатов предназначены для реализации следующих функций: 1) генерации циклических воздействий на К-разрядную шину ОК, 2) генерации последовательности на шину данных ОК, 3) формирования сигнатур с выходов ОК, 4) генерации синхроимпульсов на р-входы синхронизации ОК, Сформированные сигнатуры индицируются блоком 8 индикации, 12 ил,входом устройства, выходы разрядов регистра соединены с информационными входами с первого по К-й кольцевых сдвиговых регистров, выходы которых образуют выход устройства для подключения к входу команд контролируемого блока, выходы с первого по -й сумматоров по модулю два соединены с информационными входами соответственно с (+1)-го по 2-й формирователей остатка, первый и второй входы...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Адаптивная система обработки данных

Номер патента: 1455342
Опубликовано: 30.01.1989
Авторы: Андреев, Антонов, Курчидис, Середкин, Тиханович
МПК: G06F 15/177
Метки: адаптивная, данных
...2 в процессор с наивысшим приоритетом. Сигнал с выхода разрешения блока 1 памяти (он выдается с не. которой задержкой относительно выдачи заявки из блока 1), пройдя все предыдущие процессоры 2, поступает на вход разрешения блока 4 коммутации данного процессора 2 и инициирует появление на выходе записи блока 4 1сигнала записи, поступающего на вход записи буферного блока 10. Этот сигнал осуществляет запись в блок 1 О кода выборки с шины 14 данных. По окончании передачи заявки, по шине 13 адреса и шине 14 данных сигнал на выходе схемы 12 сравнения снимается. Таким образом, в системе осуществляется фиксированное распределение зависимьи заявок по процессорам 2, тем самым обеспечивается строгая последовательность обработки выборок одного...
Вычислительная машина

Номер патента: 951991
Опубликовано: 23.11.1986
Авторы: Злибман, Петрунек, Рухадзе, Сальков, Свительская, Черняк
МПК: G06F 15/00
Метки: вычислительная
...выход которого подключенк входу дешифратора тактов, второйвход блока соединен с входом регистра операций, выход которого подключен к входу коммутатора операций,первый и второй входы выходного коммутатора соединены с выходами соответственно дешифратора тактов и коммутатора операций, а выход выходногокоммутатора - с выходом блока,Блок управления памятью содержит счетчик адреса и коммутатор адреса, причем вход блока соединен с входом счетчика адреса, выход которого под 95199ключен к входу коммутатора адреса, авыход коммутатора адреса соединен свыходом блока.На фиг. 1 приведена структурнаясхема машины, на фиг, 2 - функциональная схема блока управления подготовкой команд, на фиг. 3 - функциональная схема блока управления сложением,...
Предыдущий патент: Устройство автоматического управления группой технологических установок
Следующий патент: Программное управляющее и контролирующее устройство
Случайный патент: Экспресс-метод определения пластификатора в полимерах