G05B 13/00 — Самонастраивающиеся системы управления, т.е. системы, автоматически выбирающие оптимальный режим работы для достижения заданного критерия
Система стабилизации объекта с присоединенным упругим элементом

Номер патента: 1525676
Опубликовано: 30.11.1989
Авторы: Мануйлов, Черныш, Шалымов
МПК: G05B 13/00
Метки: объекта, присоединенным, стабилизации, упругим, элементом
...протекать всепроцессы в системе.Предлагаемая система стабил)лзации(в Отл)лцие от прототипа) обеспечиваетпрактически полную компенсаИю возмущающе 1-о влияния динамики присоедине)4-,:ного упругого элемента на угловоедвижение объекта управления. При этсмстратегия компенсирующего управлениявыЬрана так, чтоЬы обесг)ечить фактически и активное демпфирование ксле,-".,)аний упру-ого элемента за ;цет раци- "онального использованля возможностейцеленаправленного изменения велич)лныкомпенс рующего управления в зависимости От текущего состояния упругогс)элемента, что также способствует р,остижению высокой точности стабилизацииуглового положения объекта. В результате действия формируемого комбиниОсза 1.10 Г 0 УП Рс: В;1 ЕНИ.- И Сс)М ООЪЕК Г...
Система управления с переменной структурой

Номер патента: 1532896
Опубликовано: 30.12.1989
МПК: G05B 13/00
Метки: переменной, структурой
...первый иэ которых 44 подключен к выкоду сумматора 48 и выход которого является выходом второго регулятора 8,Система управления с переменной структурой работает следующим образом.В системе создано три контура.Контур основной обратной связи, состоящий из первого сумматора 2, объекта 1 управления, идентификатора(8) 35 гДе С, =-(-1) бинох(г) миальные коэффициенты.Причем видно, что для Й = С первая разность Г - г .1 = ОУ Л с=Ог, 40 - 1, для Г = С, + С 1 Г, (г -Е)- (1- Г) = О, вторая разность ЙЛ 1 =ЬГ, = О, г = 2 и тд. Следонателс но, значение г(величина г на К-М шаге) можно автоматически выбирать, исходя из удовлетворения следующим условиям ф допЙ сМ .1 -.,.,1 а доп,(9) Д ,=1 й Г - дг 1, 1 ( Л Если теперь левь 1 е части приведенных ныражений...
Устройство для стабилизации объекта упругой конструкции

Номер патента: 1532897
Опубликовано: 30.12.1989
МПК: G05B 13/00
Метки: конструкции, объекта, стабилизации, упругой
...в соотношениях (8), Кроме р (а ) 1ч(с; + " тя того, ддя й = Г-д, п) спрявадппво50 8Й /3, а П ПД. Повтопу соотееношения (8) могут быть переписаны вформе многократных интегралов:ао = (Л - Л 1 ) ГРИ)- Р 1(-)3+ 21 И Р 2+ Р 2(-(1)3 - Р, 1)- Р,(-(1)1),а, Л (с 1 Р,И) + Р, (-(1)3 - СР,И)- Р,(-д)3, (9)аг = (лд - Л) Г Р, (д) - Р 1(-йЯ - 2 ла ИР 2 т) + Р)( й)1 жет быть использована в законе управления (5),Операция получения осредненных оценок одновременно с необходимым числом осредненнъх производных по5 времени от оцениваемого сигнала может быть осуществлена с использованием метода вероятностной аппроксимации. Суть, метода заключается в том, 10 что в некоторой заданной окрестности )(. Момента й измерения оцениваемый сигнал 1)...
Система идентификации колебаний присоединенного к объекту упругого элемента с дискретно изменяемой жесткостью

Номер патента: 1543384
Опубликовано: 15.02.1990
Авторы: Корзников, Мануйлов, Смирнов
МПК: G05B 13/00
Метки: дискретно, жесткостью, идентификации, изменяемой, колебаний, объекту, присоединенного, упругого, элемента
...можно реализовать в виде четырех усилителей и сумматора.Третий вход объекта наблюдения соединен через элемент 4 ф задержки с блоком 1, запускающим систему в работу, а четвертый вход - с источником 10 задающего воздействия, На первый, второй и третий входы объекта наблюдения подводится информация соответственно об угле и угловой скорости жесткого тела и величине управляющего параметра Ю.Для демпфирования колебаний упругого элемента может быть применено управление его жесткостным параметром, для чего гредназначен источник 10 задающего воздействия, который выдает сигнал, пропорциональный требуемому приращению жесткости Д, на четвертый вход объекта 2 наблюдения.Значение требуемого приращения жесткости поступает также на вход сумматора 5,...
Самонастраивающаяся система регулирования
Номер патента: 1466509
Опубликовано: 07.08.1990
МПК: G05B 13/00
Метки: самонастраивающаяся
...Д(1) через нуль срабатывает компаратор 9, формируя однополярный импульс, который по счетномувходу перебрасывает триггер 15, чтоприводит к отключению ключа 18 и замыканию ключа 19, Следовательно,сигнал (С). противоположного знакапоступает на вход интегратора 6 ужечерез усилитель 21 с коэффициентомусиления К 2, причем К 2К 1, Припоследующих сменах знака Д(й) происходит поочередное переключение ключей 18 и 19, а процесс заканчивается 5 1 О 15 20 по окончании импульса с четвертоговыхода генератора 1, когда размыкаются оба кпюча 18 и 19. При характере переходного процесса в системе,соответствующем заданному (заданнаястепень затухания, определяемая отношением коэффициентов К 1/К 2 выходное напряжение на выходе интегратора 6, не изменится и не...
Устройство оптимизации электропривода стенда для испытаний трансмиссий

Номер патента: 1596305
Опубликовано: 30.09.1990
Авторы: Борцов, Голик, Поляхов, Путов, Сорокин, Шмелев
МПК: G05B 13/00
Метки: испытаний, оптимизации, стенда, трансмиссий, электропривода
...периодический сигнал, среднее (выпрямленное) значение которого либо равно нулю, либо не равно нулю и отрицательно или положительно. При этом равенство нулю означает равенство амплитуд положительной и отрицательной полуволн поисковых колебаний тока якоря (мощности потерь). Это указывает на то, что средняя точка колебаний соответствует минимуму статической зависимости тока якоря приводного двигателя от тока возбуждения синхронного генератора, Ненулевое среднее значение периодического выходного сигнала блока 24 того или иного знака соответствует нахождению средней точки поисковых колебаний. на лебой или правой ветвях статической зависимости. Не.улевое среднее значение сигнала элемента 24 сравнения через масштабирую-, щий усилитель 13...
Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости

Номер патента: 1596306
Опубликовано: 30.09.1990
МПК: G05B 13/00
Метки: адаптивное, гашения, жесткости, колебаний, переменной, упругого, элемента
...- аь . для определения длительности второго участ 35 ка необходимо определить угол А,О А 2в координатном базисе (Ч - /р Ч/Имкс).Этот угол будет равен Х- ф, - у 2,где ,= агсГ.р(Е созд/ Я (К, зЫ 6- - 3)3. Ч = гВ(, - уЗф 2/ р.40 Участок 3 (А - Аз) характеризуется движением с Ю = о.1вокругполюса (р, О) и радиусом г = Йг -у) 2, фазовый угол при этом равенр =- 8, а время движения поз45 УчасткУ Т 2 - (- В)/ымксКооРди"наты точки А в координатном базисе) будут соответственСьт ддаксно (г з 1 п 6, г созВ), а в координат 50 ном базисе (Ч - Ы, Ч/ы ):АГ(г здп 6 + ,соз 9),р ИУчасток М (А д - А) хаРактеРи"зуется движением с со = ывок 55 руг полюса (с2г(г з пВ+ .2 + з з 2 д У вЗснение траектории движения на этомучастке имеет вид (Ч - а)+ 5оЗ 2 = со 2/(1...
Система стабилизации объекта с присоединенным упругим элементом переменной жесткости

Номер патента: 1603340
Опубликовано: 30.10.1990
Авторы: Мануйлов, Филимонов, Шалымов
МПК: G05B 13/00
Метки: жесткости, объекта, переменной, присоединенным, стабилизации, упругим, элементом
...плоскости и соответствующие им жесткости упругого элементасогласно приведенным выводам приЧ ) О. В силу симметрии при изменениизнака нагружения упругого элементадостаточно провести инверсию (геометрическую) логик относительно начала координат.Таким образом, закон управленияжесткостью может быть представленцу,Б 8 п(цц) =1 Ь Б 1.8 п(сИ) = -1 (8) цыг, иначе,20 Сигналы управления "1" и "О" соот;ветствуют минимальнойи максимальной жесткости упругого элемента, 25Предлагаемый закон управления (2)и (8) реализуется системой стабилизации, функциональная схема которойпредставлена на фиг,1, следующим образом. ЗССигнал, соответствующий ц ,формируется на выходе сумматора 9. На выходе блока 15 формируется Цт в соответствии с выражением (3), причем...
Система терминального управления пространственным угловым маневрированием

Номер патента: 1613999
Опубликовано: 15.12.1990
Авторы: Мануйлов, Черныш, Шалымов
МПК: G05B 13/00
Метки: маневрированием, пространственным, терминального, угловым
.... усилитель; 1 " нелинейный элемент "кореньквадратный"; - релейный элемент;К - компаратор.сБ основу изобретения положены следующие соображения,Динамика пространственного углового движения объекта в общем виде описывается системой динамических управлений Эйлера и кинематических соотношений в углах Эйлера-Крылокл:еЯ =1 Я(М) 1 ц+ 1 Мц; (1)=Ф(ц)О,тгде У = Я;, з.=13 - вектор угловыхскоро ст ей вр ащения объекта;С 1 =111 т1,31 - вектор относительных угловориентации (угловых рассогласований) объектов 1и=1 и;:о;с 1, тщ 1, - вектор ограни-.ченных управляющих гараметров;М 3, 3 - матрица распределения управляющих моментовпо каналам управленияия;1 13, 31 - тензор инерцииобъекта управле ни я;5 16139991=1,3); чч., 1=1,3 - вектора квазикоординат,...
Система адаптивного управления параметром технологического процесса
Номер патента: 1620989
Опубликовано: 15.01.1991
Авторы: Веретин, Воротынцев, Евтушенко, Подольский, Тучинский
МПК: G05B 13/00, G05D 9/12
Метки: адаптивного, параметром, процесса, технологического
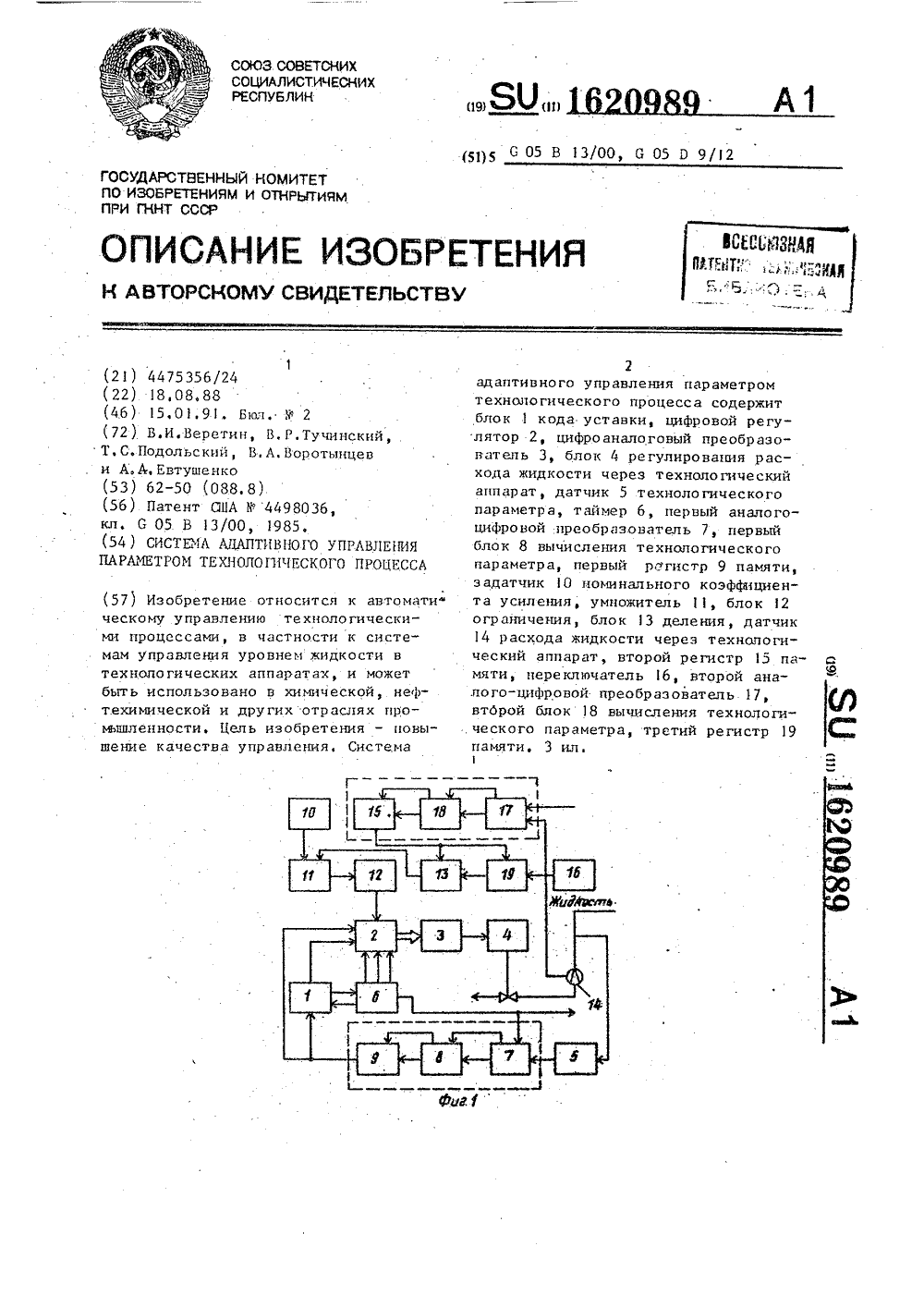
...КЯБ ("Больше", "Меньше"), Зти сигналы совместно с кодом1 К, который поступает с выхода регистра, подаются на выход регулятора2, В пятом такте работы системы поФронту сигнала с пятого выхода тайме ра 6 происходит запись новой инФорма ции в регистр 37, где она сохраня 50 . ется в течение цикла Ть, Цифроанало" говый преобразователь 3 осуществляет преобразование кодовых сигналов с выхода регулятора 2 в аналоговый сигнал постоянного тока, При одновременном поступлении на вход циФроаналогового.55 преобразователя 3 сигналов "Больше" и ,%3 или "Меньше" и ДИУ выходной аналоговый сигнал цпТ, 1 соответствен",но увеличивается или уменьшается пропорционально коду Б:ппт,1 щц п)т,)А ьБпт 1, (7) где У(п)Т 1 - величина управляюьщего воздействия...
Корректор динамической характеристики измерительного преобразователя

Номер патента: 1620990
Опубликовано: 15.01.1991
Авторы: Клейбанов, Логунова, Норкин, Пасечник
МПК: G05B 13/00
Метки: динамической, измерительного, корректор, преобразователя, характеристики
...записаны в векторной форме;81 = ал 6+ Ь,Ял (с), (3) где. 8 = .(Ол(с), 8,д с - век-тор; Ьл ф 1 Оа 1 О О О О О 1 1 51,Р," ю- постоянные коэффициен ты,Сигнал 61(С) поступает на входаналого-цифрового преобразователя 2,на выходе которого с периодом квантования ЬТ Формируется двоичный кодэтого сигнала.Система (1) дополняется описаниемансамбля входных сигналов, которыйвключает в себя все возможные траектории измерения входной Физической величины:,1620990 ш (с+1) = Ч(с) + гР(с,с+1);ш (с+2) = в (с) + с 8(с,с+); 6Из векторного уравнения (7) определяется система линейных. уравнений, , описывающих алгоритм работы корректо-,. ра(с) - гауссовский случайный век тор с независимыми компо 15 где ая из котопределена нентами, ка Ч(с) = Ар+ =щс) +...
Система оптимизации режимов работы объекта
Номер патента: 1636831
Опубликовано: 23.03.1991
Авторы: Калиногорский, Коршиков, Котухов, Мельник, Туманов, Чурилов, Шерышев
МПК: G05B 13/00
Метки: объекта, оптимизации, работы, режимов
...83, итретьих источников 84 постоянного напряжения, итретьих групп 85 ключей. Вход 86 анализатора 5 входного сигнала объекта соединен с первыми входами первых пороговых элементов 83, вторые входы которых связаны с выходами третьих ис источников 84 постоянного напряжения, настроенных так, что на второй вход первого порогового элемента 83 подан сигнал "1", на второй пороговый элемент 83 - "2", и т.д. на последний первый пороговый элемент 83 подан сигнал величиной и.1636831Выходы первых пороговых элементов той 106 и пятый 107 нормально разомк соединены с управляющими входами нутые ключи, седьмой сумматор 108. Интретьих групп 85 ключей (фиг.16). формационный вход шестого ключа 106 Вход 87 анализатора 5 входного сиг- связан с входом 109, а...
Бинарная система управления
Номер патента: 1640670
Опубликовано: 07.04.1991
Авторы: Авруцкий, Емельянов, Иванов, Коровин, Мамедов
МПК: G05B 13/00
Метки: бинарная
...последовательно соединенные второй релейный элемент 16, входом которого является сигнал ошибки х(С) с блока 2 сравнения, и второй интегратор 17 с ограничениями по выходу, выходом которого является сигнал-оператор(С). Умножитель 15, выходом которого является сигнал управления П(С) контура координатной обратнойсвязи, подключен к входу сумматора 18, к второму входу которого подключен умножитель 1 О, выходом которого является сигнал управления Б(С) другого контура координатной обратной связи. Сигнал управления П(й) с выхода сумматора 18 подается на входобъекта 1 управления,Система работает следующим образом.Контур, обеспечивающий устойчивость положения равновесия объекта управления, работает следующим образом.Выходной сигнал у(й) объекта 1...
Оптимальный регулятор частоты и перетоков мощности энергосистемы

Номер патента: 1642444
Опубликовано: 15.04.1991
Автор: Хмельник
МПК: G05B 13/00
Метки: мощности, оптимальный, перетоков, регулятор, частоты, энергосистемы
...своем выходе потенциалев=О при хО;еп0 при хпО.Отсюда следует, что управляемый вентиль переменного тока 8 - гл при еп0 ведет себя как вентиль 11 переменного тока, а при 20 еп = О представляет собой разомкнутую цепь.Таким образом, управляемый вентиль переменного тока 8 - п 1 функционирует в соответствии со следующим соотношени ем:если хО, то Оп неограничено и дп = 0;еслихп 1 О,то Оп О, сЬ О, Оп 4 п=О,30 т.е, представляет собой либо вентиль переменного тока (при хп 1 0), либо разомкнутую цепь (при х,п0) .Блок 5 модуляторов является источником синусоидальных токовопределенной З 5 величины, а на его выходе имеется выходное напряжение О. Таким образом, трансформаторы 9, вентили 8, резисторы 10 и блок 5 модуляторов описываются такими же...
Устройство формирования программы кинематического разворота твердого тела

Номер патента: 1659979
Опубликовано: 30.06.1991
Автор: Липатов
МПК: G05B 13/00
Метки: кинематического, программы, разворота, твердого, тела, формирования
...базисов Е и 1.Устройство работает следующим об зон. В момент включения устройства р стры 40-43 обеспечивают выдачу началь условий компонент кватерниона Ь (о)( = в соответствующие сумматоры 36-39. В с зи с тем, что на входах 1-3 блока интегри вания информация отсутствует, на вто входы блоков 36-39 сумматоров 36-39 к приращений компонент кватерни Ь 4 не поступают. Таким образом с 1-4 ходов блока интегрирования на соотве вующие входы формирователя управле поступают коды начальных условий АЩ, которые преобразуются в коды управления в соответствии с (23) следующим образом, Код 4(0) в квэдраторе 3 возводится в квадрат и поступает на вычитаемый вход вычитателя 4, на второй вход уменьшэемого которого постоянно подается код "1", Далее код ( 1 -...
Адаптивная система управления с переменной структурой

Номер патента: 1659980
Опубликовано: 30.06.1991
Авторы: Буслов, Жданов, Решетняк
МПК: G05B 13/00
Метки: адаптивная, переменной, структурой
...воздействие задатчика 1; Я - сигнал переключения;а цз, у цз - переменные коэффици; енты усилителя 15.Знак цз определяется с помощью блока 6. Сравнение знаков задающего воздействия цз и сигнала переключения 5 осуществляется в множителе 11, выходной сигнал 25 которого управляет работой усллителя 15,Выходной сигнал х поступает также на первый вход усилителя 16 и вход блока 7, Усилитель 16 формирует сигнал управления 30 вх = фх х по следующему закону ьу при ЬХ - О,х сОгде х - выходнои сигнал обьекта 20 управле) 5 - сигнал переключения; а х, у х - переменные коэффициенты усилителя 16,Знак выходного сигнала х определяется 40 с помощью блока 7. Сравнение знаков выходного сигнала х и сигнала переключения 5 осуществляется в множителе 12, выходной...
Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом

Номер патента: 1659981
Опубликовано: 30.06.1991
МПК: G05B 13/00
Метки: инерционного, объекта, оптимального, присоединенным, работой, упругим, элементом
...вокрестности линии 6() = 0 исключается возможность кратковременных переходов с управляемого режима нагружения нэнеуправляемый и обратно, т,е, с режима иэмейения у по линейному закону на режим движения с р(1 ) = сопи= О,Предлагаемый алгоритм реализуетсяустройством, функциональная схема которого представлена на фиг, 1, При этом формирователь 12 модуля формируетхквадратор 13 - хг, на выходе множителя 14получаем аиЯх 1, на выходесумматора 16 -- (х 3/х 1+аоЯ 1 х 1 ) а с23выхода множителя 15 снимается величинапотребного финитного ускорения Оф(т) =3 ( х 6/ х 1 1+ ааЯх) 3 Яп ( р Ор )2Нуль-индикатор 20 контролирует1 м - О,р 1 на малость, источник 19 постоянного напряжения формирует значение Ь стаким расчетом, чтобы с выхода делителя 18снималась...
Система регулирования объектов высокого порядка с запаздыванием

Номер патента: 1667002
Опубликовано: 30.07.1991
Авторы: Авдеев, Киселев, Марьясов, Мышляев, Сарапулов, Соловьев
МПК: G05B 13/00
Метки: высокого, запаздыванием, объектов, порядка
...Т 2 = 2 Т; Тэ =. Т,згде к 1, кг, 1 з - коэффициенты соответствующих масштабирующих элементов;Тп - интервал памяти системы,В системе регулирования взят объекттретьего порядка, Аналогично определяетсясвободное движение и для объекта болеевысокого порядка.Выходной сигнал первого регулятора 17об оценке приведенного к входу объекта 1возмущения ф - т) подается на группу 19элементов экстраполяции, в которых экстраполируется траектория ч на интервалевремени от (т - т) до 1; в элементе экстраполяции 19-1 на интервал времени Лт; в элементе экстраполяции 19 - (й) - на (й --1) Лт,; в элементе экстраполяции 19 - й -на й Лт. Число й выбирается исходя източности экстраполяции и в большинствепрактических случаев берется равным 10-20,Тогда Лг = т/й есть...
Система управления

Номер патента: 1674060
Опубликовано: 30.08.1991
Авторы: Авдеев, Киселев, Марченко, Мышляев
МПК: G05B 13/00
...с выходом второго блока 7 сравнения, один из входов которого соединен с выходом регулятора 5 и вторым входом сумматора 3, а другой - с входом блока 8 задержки, вход которого соединен с выходом сумматора 3, выход сумматора 3 соединен через объект управления 9 с входом третьего блока сравнения,Система работает следующим образом,5 10 15 20 ЗО 35 40 45 Вырабатываемое регулирующее воздействие направлено на регулирование свободного и вынужденного движения объекта. Для этого сигнал о выходной переменной у(т) натурного объекта регулирования поступает на третий блок 1 сравнения, где вычитается из сигнала о заданном значении у(т) выходной переменной, Сигнал о полученной ошибке регулирования е(1) с выхода третьего блока 1 сравнения поступает...
Адаптивный регулятор

Номер патента: 1675845
Опубликовано: 07.09.1991
Авторы: Денисов, Огородник, Ордовская, Печук
МПК: G05B 13/00
Метки: адаптивный, регулятор
...Ке (т) здп е (т),Сигнал К 1 е (т) з 9 п к (т) подается на30 первый вход управляемого ключа 8, выходкоторого является сигналом управления, поступающим на объект,Одновременно сигнал ошибки я (т) поступает в канал формирования закона управления ключом 8, При этом я(т) подаетсяна вход дифференциатора б, на выходе которого получают знакопеременный сигнале.Далее е (1) поступает на вход второгоблока 7 определения модуля, где преобразуется в знакопостоянный сигнал 1 е (т ) ,который является управляющим сигналомдля ключа 8. Таким образом, сигнале (т )подается на управляющий вход ключа 8.При этом, еслие (т)= О, то ключ 8замкнут на время задержки охключениятк =сопи и на выходе ключа 8 формируется сигнал управления.Еслие (т )О, то ключ 8...
Устройство адаптивного управления объемным гидравлическим приводом

Номер патента: 1686407
Опубликовано: 23.10.1991
Авторы: Власов, Каминская, Козин, Мельников, Штейнцайг
МПК: G05B 13/00
Метки: адаптивного, гидравлическим, объемным, приводом
...Озг поступает на вход блока 6 дистанционного пропорционального изменения параметра регулирования гидромотора, при этом давление управления Ру 2 на выходе блока 6 изменяется пропор ционэльно задающему напряжению Озг.Давление УпРавлениЯ Руг постУпает с выхода блока 6 на вход гидравлического механизма 5 изменения параметра регулирования гидромотора, при этом механизм 5 10 осуществляет изменение параметра регулирования гидромотора уг пропорционально давлению управления Ру 2 на его входе, т.е. пропорционально задающему напряжению Озг на входе блока 6, 15При изменениях параметра регулирования насоса ун и параметра регулирования гидромотора уг значения приведенных эквивалентных масс )т)1 и гпг изменяются согласно зависимостям 20 2гп 1 1Цй н...
Устройство для измерения и коррекции перекоса камеры судоподъемника

Номер патента: 1735804
Опубликовано: 23.05.1992
Авторы: Гринберг, Кабанов, Колосов, Попов
МПК: G05B 13/00
Метки: камеры, коррекции, перекоса, судоподъемника
...перехода через нуль мгновенных значений сравниваемых колебаний на величинугде р, - искомая разность фаз; гп - целоечисло фазовых циклов.Пакеты сигналов Оз" и Оз 0 поступают в цифровой фазометр 25, на входе которого имеется формирователь 26, представляющий собой нуль-орган, действие которого сводится к генерированию коротких импульсов О 4 в моменты перехода мгновенных значений напряжений Оз через нуль. С выхода формирователя импульсы О 4 поступают на две схемы 27 и 28 совпадения. Схемы совпадения срабатывают поочередно от генератора 29, На второй вход схемы 27 подается импульс О 5. Импульс присутствует на входе схемы 27 совпадения в интервале времени, в течение которого на первом входе той же схемы совпадения имеет место пакет...
Система автоматической оптимизации

Номер патента: 1735805
Опубликовано: 23.05.1992
Автор: Стрижак
МПК: G05B 13/00
Метки: автоматической, оптимизации
...в элемент памяти координатой из и+1 вершин исходного симплекса, в которой отклик был максимальным. В последующем, если на выходе блока 14 сравнения не появляется импульс совпадения, в блок запоминания наилучших входов стробирующими импульсами 8 а производится запись координат на выходе блока 12 расчета координат отраженной вершины симплекса,Таким образом, если в момент времени 1 з выполняется условие У+У 1то в момент времени сь в блок 4 - 1 памяти заносится значение отклика Уг+г, соответствующее Х+2. В блоке 4 - 1 памяти таким образом записаны отклики У,.Уп, Уп+1, Уп+г, Информация в элементах 1 - и памяти сохраняется, а в элементах и+1, п+2, изменяется, причем запись очередного отклика производится в элемент памяти, номер которого...
Устройство коррекции люфта в системах регулирования

Номер патента: 1751715
Опубликовано: 30.07.1992
Авторы: Афанасьев, Гулько, Кулешов, Томашевский
МПК: G05B 13/00
Метки: коррекции, люфта, системах
...первого 10 и второго 11 элементов И-НЕ соединены соответственно с первыми входами первого 5 и второго 6 элементов И и с первыми входами второго 11 и первого 10 элементов И-НЕ, вторые входы первого 10 и второго 11 элементов И-НЕ подключены соответственно к входам устройства, выходы первого 5 и второго 6 элементов И связаны соответственно с входами управления сложением и вычитанием реверсивного счетчика 12, и выходов разрядов которого присоединены к соответствующим входам дешифратора 13, выходы разрядов которого с первого по п-й, кроме нулевого разряда, подсоединены к входам переключателя 14, а выход генератора 15 импульсов подключен к счетному входу реверсивного счетчика 12, выходы первого 1 и второго 2 элементов НЕ связаны...
Система автоматического управления нестационарным объектом

Номер патента: 1756861
Опубликовано: 23.08.1992
Автор: Елсуков
МПК: G05B 13/00
Метки: нестационарным, объектом
...г, Ужгород, ул.Гагарина, 101 счет обратной нелинейной функции управляющего устройства, что может быть обусловлено, в частности, нестационарностью объекта, практически не сказывается на динамических свойствах низкочастотной части системы.Таким образом предложенная система автоматического управления нестационарным объектом обеспечивает при управлении йелинейным многорежимнцм объектом заданную динамическую точность,Формула изобретения Система автоматического управления нестационарным объектом И-го порядка, содержащая элемент сравнения, который подключен одним входом к задатчику, другой входом к выходу объекта, выходом - к входу корректирующего устройства, выполненного в виде. последовательно соединенных интегратора,...
Устройство для управления объектом с присоединенными упругодеформируемыми элементами

Номер патента: 1767476
Опубликовано: 07.10.1992
Авторы: Герасимов, Карагодин, Колчин, Плотников, Сясин
МПК: G05B 13/00
Метки: объектом, присоединенными, упругодеформируемыми, элементами
...передачи обьекта как "твердого тела" со ставляет1(о =-1 В (6) Знак основного управляющего момента на первом интервале определяется выражением45н 1 =/0819 п Чуч= - о 1 Оо о2 1(о ц 1(7)На первом этапе осуществления разворота обьекта с присоединенными УДЭ - эта пе ориентации - обьект управляется как "твердое тело" в соответствии с выражениями (3) - (7) при помощи основного управляющего органа; одновременно осуществляется частичное демпфирование 55 колебаний УДЭ при помощи вспомогательного управляющего органа, а имеНно сравнивается значение угловой скорости объекта у и угловой скорости модели обьекта как "твердого тела" ум, получаемая величина ошибки, вычисляемой как7 =7 - Ум (8) используется как управления объектом, При этом...
Устройство управления динамическим объектом с присоединенным упругим элементом

Номер патента: 1767477
Опубликовано: 07.10.1992
МПК: G05B 13/00
Метки: динамическим, объектом, присоединенным, упругим, элементом
...до Тк интервалах Л 11, Ь 2.Величины в 1, и 2 на этих интервалах легкоопределить из выражений ц 1 о 2 (0 )2 ЛТо 2 = ( У (0)+У (0)((-2 Т которые получены из систеотносительно длительностепри учете, чтоЛО = Л 12=2 КТ,Знак управляющего момента на первом интервале определяют в соответствии с выражениемО = -0 39 п ЧЧ= -+- - у( О ), (5)В результате в конце управления все фазовые координаты будут удовлетворять конечным условиям ( у= О, у= О, з = О, з = 0),Длительность же разворота будет большеоптимальной не более чем на два периодаколебаний упругого элемента.Для оценки преимуществ предлагаемого способа был проведен ряд математических экспериментов, Осуществлялсяразворот объекта управления с параметрамиМомент инерции объекта= 1400 кг м...
Способ автоматического регулирования выходного параметра объекта управления по возмущению на входе
Номер патента: 1783472
Опубликовано: 23.12.1992
Авторы: Лабзов, Миндубаев, Муниров, Слободкин
МПК: G05B 13/00
Метки: возмущению, входе, выходного, объекта, параметра
...реализовать нельзя), В результате на выходе блока 16 устанавливается ненулевой сигнал, а на выходе блока 17- единица,Выходной сигнал (единица) блока подготовки схемы к изменению настроечного параметра "отпирает" блок запоминания 12, В этом состоянии сигнал на выходе бло 510 ка 12 равен входному сигна.-у этого блока. Когда единица на выходе блока 10 пропадает (заменяется на ноль), блок 12 "запирается" и сохраняет на своем выходе значение настроечного параметра, соатветствующее заданию на величину рвгулирующего параметра, введенного в систему оператором в момент, когда он в последний раэ вращал (перемещал) рукоятку эадатчика 9.Запомненное значение настроечного параметра, будучи постоянным, не изменяется и тогда, когда величины...
Система управления
Номер патента: 1792539
Опубликовано: 30.01.1993
Автор: Лащев
МПК: G05B 13/00
...случае, состоит из усилителя 26 с переменным коэффициентом усиления и сумматора 11, на второй вход которого поступает аддитивная помеха ф), Сигнал с выхода измерителя 38 через умножитель 13 поступает через умно- житель 14 на вычитающийвход сумматора 1, Входной сигнал ц(1) системы поступает на вход модели 36 системы и через усилитель 27 на вычитающий вход сумматора 2, на суммирующий вход которого поступает сигнал у(1) с выхода умножителя 13. Сигнал невяэки я(1) с выхода сумматора 2 поступает на суммирующий вход сумматора 3, а через усилитель 28 на вычитающий вход сумматора 3, на выходе которого получается сигнал 9(1), служащий сигналом для формирования параметрических приращений ЙД) и Л гпн(1),Настройка параметра щ(1) производится по...
Система адаптивного управления

Номер патента: 1807446
Опубликовано: 07.04.1993
Автор: Лащев
МПК: G05B 13/00
Метки: адаптивного
...управления40 зависимостью е(1) =я(Го) +Х яс 2 с. Знасо. чит, с течением времени начальные условия е(со).будут скомпенсированы сигналом действйя производной.Реализация алгоритма (18) в виде контура адаптации не вызывает затруднений.Теперь рассмотрим несколько иной подход к синтезу алгоритмов адаптации параметров регулятора, для чего из (11) 50 запишем:в виде ч 7 7 н+ - Лк ) + (Лкй) +(Лпгй) +(Лай) 2 (21) Поступая аналогично тому, как были получены алгоритмы адаптации (18), можем записать алгоритмы адаптации параметров регулятора для рассматриваемого случая: к (г ) = к ( со ) - у ( ч с сс + 7 у м + + 2 г ч 1 х + ннн н х ) н с )со2 г 7 и+ чно)н)соРеализация алгоритма (22) сложнее реализации алгоритма (18), поэтому на чертеже представлена...