Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
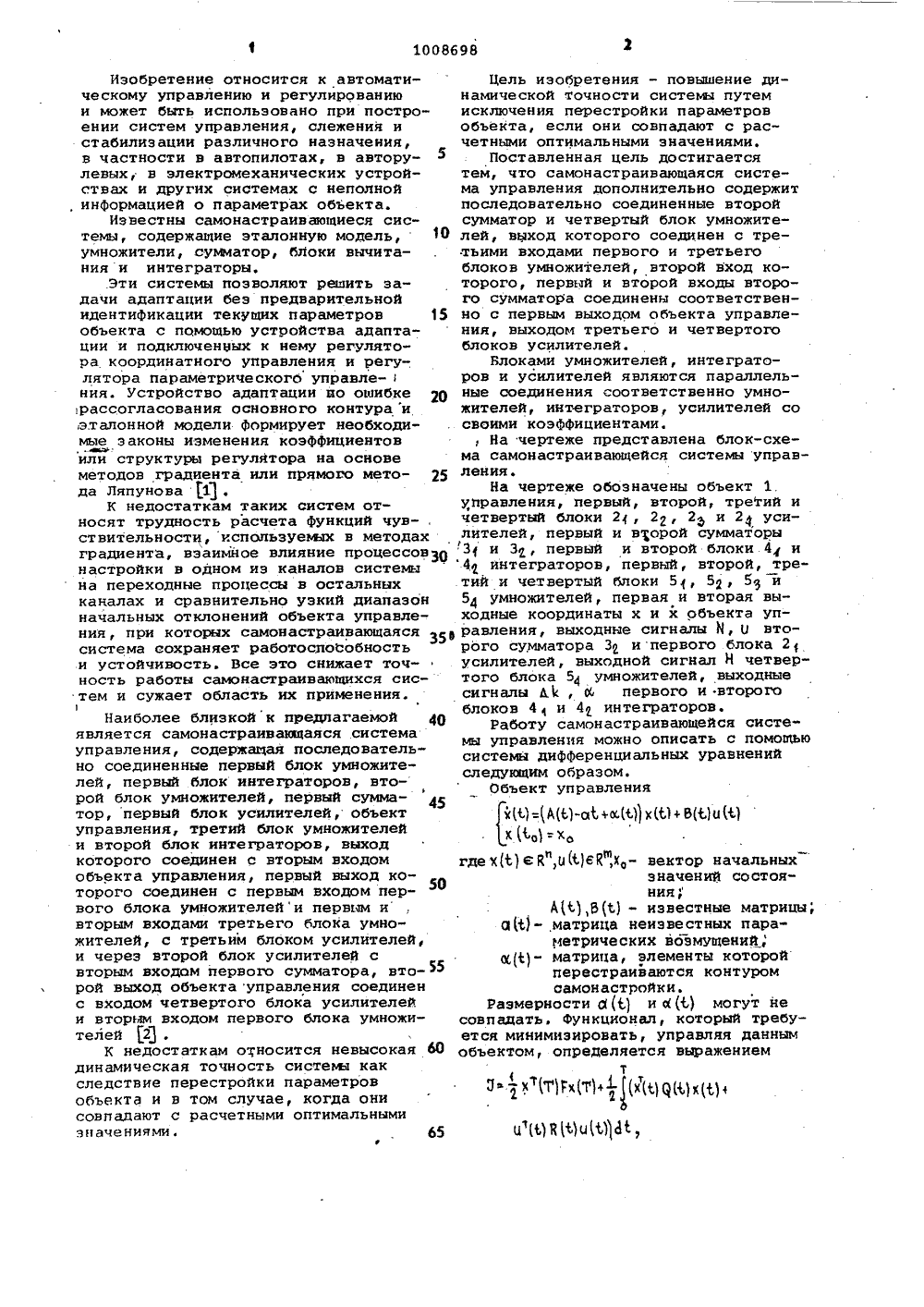
(71) Московский институт электронного мащиностроения(56) 1. Солодовников В.В., Ирамко Л.С Расчет и проектирование аналитических самонастраиванщихся систем с эталонми моделями. М., фМащиностроение", 72; с. 270.2. Авторское свидетельство СССР В 650053, кл. С 05 В 13/02, 1979 (прототип).(54)(57) САИОНАСТРАИВЮОЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные первый блок умножителей, первый блок интеграторов, второй блок умножителей, первый сумматор, первый блок усилителей, объект управления, третий блок умножителей 12А.Титов ны 19 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ и второй блок интеграторов, выход которого соединен с вторым, входом объекта управления, первый выход которого соединен,с первым входом первого блоКа умножителей и первым и вторым входами третьего, блока умножителей, с третьим блоком усилителей и череэ второй блок усилителей с вторым входом первого сумматора, второй выход объекта управления соединен с входом четвертого блока усилителей и вторым входом первого блока умножителей, о т л и ч а в щ а я с я тем, что, с цельв повышения быстродействия системы, она.содержит последователь но соединенные второй сумматор и четвертый блок умножителей, выходС которого соединенс третьими входами первого. и третьего блоков умножителей, второй вход которого, первый и второй входы второго сумматора соеди ( иены соответственно с первым выходом объекта управления, выходом третьего Я и четвертого блоков усилителей.Изобретение относится к автоматическому управлению и регулированиюи может быть использовано при построении систем управления, слежения истабилизации различного назначения,н частности в автопилотах, в авторулевых, в электромеханических устройствах и других системах с неполной , информацией о параметрах объекта.Известны самонастраивающиеся системы, содержащие эталонную модель, 10умножители, сумматор, блоки вычитания и интеграторы..Эти системы позволяют решить задачи адаптации беэ предварительнойидентификации текущих параметров 15объекта с помощью устройства адаптации и подключенных к нему регулятора координатного упранления и регулятора параметрического управле- (ния. Устройство адаптации ио ошибкерассогласования основного контура иэталонной модели Формирует необходимые законы изменения коэффициентовили структуры регулятора на основеметодов градиента или прямого метода Ляпунова 1 .К недостаткам таких систЕм относят трудность расчета функций чув-,ствительности, используемах в методахградиента, взаимное влияние процессовЗ 0настройки н одном из каналов системына переходные процессы в остальныхканалах и сравнительно узкий диапазонначальных отклонений объекта управления, при которых самонастраивающаяся З 5 эсистема сохраняет работоспособностьи устойчивость. Все это снижает точность работы самонастраивающихся систем и сужает область их применения.1Наиболее близкой к предлагаемой 40является самонастраивающаяся системауправления, содержащая последовательно соединенные первый блок умножителей, первый блок интеграторов, второй блок умножителей, первый сумматор, первый блок усилителей, объектуправления, третий блок умножителейи второй блок интеграторов, выходкоторого соединен с вторым входомобъекта управления, первый выход которого соединен с первым входом первого блока умножителейи первым ивторым входами третьего блока умножителей, с третьим блоком усилителей,и через второй блок усилителей с вторым входом первого сумматора, вто рой выход объекта управления соединенс входом четвертого блока усилителей и вторым входом первого блока умножителей 12) .К недостаткам относится невысокая 60 динамическая точность система как следствие перестройки параметров объекта и н том случае, когда они совпадают с расчетными оптимальными значениями, 65 Цель изобретения - повышение динамической точности система путемисключения перестройки параметровобъекта, если они совпадают с расчетными оптимальными значениями,Поставленная цель достигаетсятем, что самонастраивающаяся система управления дополнительно содержитпоследовательно соединенные второйсумматор и четвертый блок умножителей, выход которого соединен с третьими входами первого и третьегоблоков умножителей, нторой вход которого, первый и второй входы второго сумматора соединены соответственно с первым выходом объекта управления, ныходом третьего и четвертогоблоков усилителей.Блоками умножителей, интеграторов и усилителей являются параллельные соединения соответственно умножителей, интеграторов, усилителей сосвоими коэффициентами,На чертеже представлена блок-схема самонастраивающейся системы управленияНа чертеже обозначены объект 1управления, первый, второй, тре 1 ий ичетвертый блоки 2, 22, 2 и 24 усилителей, первый и второй сумматоры3 и З, первый и второй блоки 4 и4 интеграторов, первый, второй, третий и четвертый блоки 5, 5 у, 5 и54 умножителей, первая и вторая выходные координаты х и х объекта управления, выходные сигналы И, 0 второго сумматора 3 и первого блока 2усилителей, выходной сигнал Н четвертого блока 54 умножителей, выходныесигналы д 1, Ж первого и второгоблоков 4,( и 4 интеграторов.Работу самонастраивающейся системы управления можно описать с помощьюсистема дифференциальных уравненийследующим образом.Объект управлениях 1):ЦЦ-а 1 (хи 4 хИ) Е(мну)х ,) =х,где х(Ц Ю Й,О (Ц 61,ХО- вектор начальныхзначений состоянияА,В(С) - известные матрицы,О Ю-,матрица неизвестных параметрических возмущений,1008698 где 40 60 где Т - знак транспортирования,Т - конечное время работы системы,матрицы Р, Ц (С 1, Н (С) заданы.Управление выбирается в видец(Ц=-К ф,В(Ц(к(ЮдМ(Ы) х(Ц Когда размерности а и о совпадают, Ь 1 берется равным О. 10К(М определяется уравнениемК(Ц=-К(ЦАВО-А ЩКфКИЭМК Ф ВЪ) КФ. О ВК(Т)= Н15Эталонная системахм = Аахм(Ч+ 8(Ц 0 И)хм( а 1 = хо 20Функция Гамильтона для систеьи (5) Но=-хмццОхм(ц+1 и(цщцО 1хм Щ КЩ х =х(ЦКЩ х,(Ц,Для исходной системы (1) строится функция Н - выходной сигнал четвертого блока 54 умножителей.й=-хфЦх(Ц+фцфйфо(Ц+хЩК(Чх+ + - хЦ КЯх Щ:хх(ЦС (Цхф+ х ф К(О хЩ =2е хфСДЦхЮКЮ хЩ)= х(Ц ЙФ, . 35 САЦ:-К(ЧАЩЕК(ЦВ(0 Г (ЦБМК(Ц)МЩ =С)(Чх К(Чх(Ц Из (7) следует, что Н=О является необходимым и достаточным условием минимума функционала (2), Это обстоя тельство положено в основу конструкции алгоритмов настройки, с помощью которых будут парироваться параметрические возмущения 0(С 1 .При этом, используя прямой метод Ляпунов для асимптотической сходи- мости к оптимальному значению критерия качества (2), можно получить, что перестройка параметров объекта или управления должна производиться в соответствии с уравнениями: 55 определяющими выходные значения сс иА) первого и второго блоков 4, 4 65.интеграторов, причем значения КЯ, й Ж Х(ЦЬЩК(1), необходимые для рботы алгоритмов, определяются до начала работы системы на стадии проектицования.Самонастраивающаяся система управления работает следующим образом. дя управления объектом выходные координаты объекта управления х и х через третий и четвертый блоки 2 и 24 усилителей подаются на второй сумматор 3, который по формуле (81 образует сигнал М , который вместе с координатой х поступает на входы четвертого блока 54 умножителей для получения значений гамильтониана Н по Формуле (7). Выход четвертого, блока 54 умножителей связан с третьими входами первого и третьего блоков 51 и 51 умножителей, на первые и вторые входы которых поступают соответствующие координаты объекта 1. Первый и третий блоки умножителей формируют. сигналы, поступающие затем на входы первого и второго блоков интеграторов, которые определяют алгоритмы настройки управляющего воздействия а или параметров объекта управления по формулам (10) и (9) соответственно. Выходной сигнал 4 второго блока 42 интеграторов подключен к второму входу объекта управления. Выходной Сигнал й 1 первого блока 44.интеграторов связан первый вход второго блока 52 умножителей с первым входом первого Фсумматора 34, второй вход второго блока 5 умножителей соединен с соответствующим выхбдом х объекта 1 управления, который через второй блок 2 усилителей подключен к второму входу первого сумматора 34. На выходе ф первого сумматора 3 после прохождения через первый блок 2 усилителей формируется по формуле (3) управляющий сигнал О , поступающий на первый вход объекта 1..Предлагаемая система позволяетповысить точность работы путем отключения систем настройки в случае первоначального нахождения объекта наоптимальной траектории движения, иэза независимости процессов настройкипараметров от. амплитуды и форяювходных воздействий посредством сохФранения устойчивости адаптивной системы при конечных отклонениях параметров объекта от оптимальных значений параметров, Она монет также найти применение.и в тех областях техники, где известные схем самонастройки ранее не применялись. Сочетаниедвух контуров настройки (параметрического и координатного) позволяет более оперативно и точно производить компенсацию возмущенных параметров.1008 Ь 98 Составитель Л.ЛащевРедактор Л.Лежнина Техред А.Бабинец Корре ктор М. Коста,Заказ 2335/57 , Тираж 872 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, москва, Ж, Рауюская наб., д.4/5 Филиал ППП "Латент", г.ужгород, ул.Проектная, 4Р Предлагаемая система дает возможностьупростить наладку систем управленияиз-за определения ряда параметров системы на стадии проектирования и снизить эксплуатационные расходы
СмотретьЗаявка
3344666, 12.10.1981
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
АФАНАСЬЕВ ВАЛЕРИЙ НИКОЛАЕВИЧ, ТИТОВ ВАЛЕРИЙ АЛЕКСАНДРОВИЧ, ПУПКОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 30.03.1983
Код ссылки
<a href="https://patents.su/4-1008698-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Программная следящая система
Номер патента: 1108394
Опубликовано: 15.08.1984
МПК: G05B 19/406
Метки: программная, следящая
...3) происходит срабатывание блока 20 совпадения, благодаря чему с блока 16 подается питание на программное устройство 15 и блок 17 контроля. Одновременно переключатель 18 подключает выходной сигнал программного устройства 15 0 к входу блока 6 сравнения, Так как при подаче питания на устройство 15 входящий в него счетчик 1 может установиться в любое состояние, то в первый момент времени после подачи питания на выходе цифроаналогового преобразователя 3 возникает напряжение У Ф П =.О. Выявленное блоком 6 сравнения и усиленное усилителем 7 рассогласование между сигналами 0.1 и П приводит к срабатыванию порогового блока 10 и система переходит в режим записи начальных ус 11083945 10 15 20 25 ЗО 35 40 45 50 55 ловий в программное устройство...
Устройство для измерения и воспроиз-ведения угловых перемещений

Номер патента: 848995
Опубликовано: 23.07.1981
Авторы: Гуторов, Макарова, Пономаренко, Цивирко
МПК: G01B 7/30
Метки: воспроиз-ведения, перемещений, угловых
...в исходное состояние. Со второй дорожки магнитного диска 5 воспроизводящей головкой 7 непрерывно считываются импульсы, которые через усилитель-формирователь 12 поступают на третий вход блока 13. Частота следования этих импульсов пропорциональна скорости вращения диска 5.В течение временного интервала, который определяется блоком 13 управления, эти импульсы поступают на счетчик 17. Длительность временного интервала пропорциональна угловому перемещению платформы 3 относительно основания.Импульсы, воспроизводимые магнитными головками б и 7, через усилители-формирователи 1 О и 12 подаются на входы второго блока 14 управления. 55Сигнал, снимаемый нижней магнитной головкой 7, своим передним (задним) Фронтом импульса переводит блок 14 в...
Устройство демодуляции двоичных сигналов

Номер патента: 896788
Опубликовано: 07.01.1982
Авторы: Карташевский, Николаев
МПК: H04L 27/22
Метки: двоичных, демодуляции, сигналов
...блока сложения и через двенадцатый дополнительный перемножитель с одним входом первого блока сложения, другой вход которого соединен с выходом десятого дополнительного перемножителя, другой вход которого и другой вход одиннадцатого дополнительного перемножителя соединен с выходом первого усилителя, выход второго усилителя соединен с другими входами двенадцатого, второго, восьмого и девятого дополнительных перемножителей, выход седьмого дополнительного перемножителя соединен с соответствующим вхо 50 дом третьего дополнительного блока сложения, выход пятого дополнительного перемножителя соединен с соответствующим входом четвертого дополнительного блока сложения, выход шес -55того дополнительного перемножителя соединен с...
Регулятор возбуждения для синхронного генератора

Номер патента: 991573
Опубликовано: 23.01.1983
Авторы: Башнин, Каштелян, Кичаев, Кожевников, Сирый, Смирнов, Шустерман, Юрганов
МПК: H02P 9/14
Метки: возбуждения, генератора, регулятор, синхронного
...входом связанный с выходом 35. системы 1 управления возбуцителя.Канал регулирования по частоте содер.жит измеритель 8 изменения частотынапряжения синхронного генератора, выходом соединенный с первым входомсумматора 9/последовательно соединенные межцу собой дифференциатор 10 иорган 11 изменения интенсивности возцействия по иЭменению частоты напряжения генератора, выхоцом подключенный 45к четвертому входу суммируюше-формирующего блока 2, пятый вход которого связан с выходоморгана. 12 измененияинтенсивности воздействия по изменениючастоты напряжения генератора. Выходоргана 12 соединен с выходом сумматора 569 и входом дифференциатора 10,Канал управления по току соцержитизмеритель 13 изменения тока роторасинхронного генератора, выход...
Предыдущий патент: Система автоматического управления
Следующий патент: Самонастраивающаяся система управления ультразвуковой сваркой
Случайный патент: Резинометаллическая гусеница