Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТ ИЧЕСНИХРЕСПУБЛИК рц с 05 8 13/О СССРРЫТИЙ 1лч д ПИСАНИ ЕТЕНВУ ТЕПЬСТ ГОСУДАРСТВЕННЫЙ НОМИТЕ ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И Н АВТОРСКОМУ СВ(54)(57) СИСТЕМА УПРАВЛЕНИЯ, содержащая первый блок дифференцирования,.,БО 1024877 последовательно соединенные первый сумматор, элемент переменной струк" туры и объект управления, выход которого соединен с первым входом первого сумматора и через второй блок дифференцирования - с вторым входом первого. сумматора, и последовательно соединенные блок выделения модуля и второй сумматор, .к второму входу которого подключен выход блока опорного напряжения, а выход второго сумматора соединен с вторым входом элемента переменной структуры, о т л ич а ю щ а я с я тем, что, с целью упрощения системы и повышения надежности при сохранении статических д и динамических свойств, выход перво- Е го сумматора через первый блок дифференцирования подключен к блока выделения модуля.Изобретение относится к автомвти"ческому управлению нестационарнымиобъектами, например, в роботостроении в системах автоматического управления приводами рабочих органов мани"пуляционных роботов, в станкострое"нии в системах автоматического управления приводами главного движения металлорежущих станков, в метал"лургии в системах автоматическогоуправления приводами прокатных стан"ков.Известны системы автоматическогоуправления с сигнальным типом адап"тации, имеющие в своей структуреэлементы с разрывной характеристи"кой, блоки выделения модуля, блокидифференцирования, сумматоры, системы с внешним возбуждением и само" осциллирующие системы 11Однако практическое применение данных методов управления ограничено,Наиболее близким техническим решением к изобретению является система автоматического управления с переменной структурой, содержащая первый блок дифференцирования, по" следовательно соединенные первый сумматор, элемент йеременной структуры и объект управления, выход ко" торого соединен с первым входом первого сумматора и через второй блок дифференцирования - с вторым входом первого сумматора, и последор вательно соединенные блок выделения модуля и второй сумматор, к второму входу которого подключен выход блока опорного напряжения, а выход второго сумматора соединен с вторым входом элемента переменной структуры 2Недостатком известной системы является большая сложность и, вследствие этого, пониженная надежность, Сложность системы управления определяется необходимостью наличия коор динат, в которых присутствует информация о внешних воздействиях, Для обработки этой информации в системе управления существует специальная подсистема, содержащая блоки дифференцирования сигнала по току якорядвигателя, блоки выделения модуля, выходы которых соединены с входами элемента переменной структуры, необходимостью осуществления компен" сации нулей, имеющихсв в передаточной функции объекта, что осуществляется блоками дифференцирования, где 0л Ф5522-2 П ЕЩ управляющее воздеиствиена объект управления,элемент матрицы управления ррэлемент матрицы разделяющей поверхности,блоками выделения модуля, выходы,которых соединены с входами элементапеременной структуры, Для формирования воздействия по управлению син"5 тезируется еще одна подсистема, содержащая динамическое звено, блокивыделения модуля, выходы которых со"единены с входами элемента пере"менной структуры. Таким образом, в2 О известной системе число блоков дифФеренцирования выходного сигнала ско.рости двигателя становится равнымпорядку объекта (п).Цель изобретения - упрощение сис 15 темы и повышение надежности присохранении статических и динамических свойств системы.Цель достигается тем, что в систему автоматического управления,20 содержащую первый блок дифференцирования, последовательно соединен"ные первый сумматор, элемент переменной структуры и объект управле"ния, выход которого соединен с пер"25 вымвходом первого сумматора и черезвторой блок дифференцирования - свторым входом первого сумматора,и последовательно соединенные блоквыделения модуля и второй сумматор,30 к второму входу которого подключенвыход блока опорного напряжения авыход второго сумматора соединен свторым входом элемента переменнойструктуры, выход первого сумматораЭ 5 через первый блок дифференцированияподключен к входу блока выделениямодуля,На чертеже изображена структурнаясхема предлагаемой системы управления40 Система автоматического управления содержит первый сумматор 1, первый 2 и второй 3 блоки дифференциро вания, блок 1 выделения модуля, второй сумматор 5 элемент переменной45 структуры 6, блок опорного напряжения 7 и объект управления 8.Предлагаемая система управленияреализует функцию управления в виде- координата системы послелинейного неособого преобразования;- входной сигнал задания0,Ф - равномерности векторасостояния системы и .век"тора управления соответственно.Система управления работает сле" дующим образомВходной сигнал Ч через сумматор 1 передается на первый вход элемента переменной структуры 6 и одновременно на вход второго блока дифференцирования 2. При неизменном входном сигнале первая производная его равна нулю и на выходе второго блока дифференцирования 2 отсутствует сигнал, который должен поступать на .вход блока выделения модуля ч с,вы хода которого поступает на первый ,вход второго сумматора 5. Поэтому на второй вход элемента переменной структуры 6, поступает сигнал, про" порцианальный только:величине опор ного напряжения, задаваемого блоком опорного напряжения 7 на втором входе сумматора 5. На выходе элемента переменной структуры 6 Формируется сигнал О, являющийся Функцией сигналов его первого и .второго входов, который поступает на вход объекта ,управления 8. При номинальных параметрах объекта управления 8 и отсутствии внешних воздействий на объект управления 8, сигнал на выходе объек" та управления совпадает с входным сигналом. На восходе первого суммато . ра 1 сигнал равен нулю и соответственно на первый вход элемента пере"Ч4 меннои структуры 6 сигнал не поступает, и сигнал не выходе блока 6 является функцией только сигнала на его втором входе.Предположим, что параметры объекта управления 8 отличаются от заданного и на него действуют внешние воздействия, Тогда сигнал на выходе объекта управления 8 не совпадает с входным сигналом, поэтому на выходе первого сумматора 1 появится сигнал, пропорциональный отклонению от. заданного выходного сигнала и его первой производной. Этот сигнал поступает одновременно на первый вход элемента переменной структуры 6 и на вход второго блока дифференцирования 2. На выходе блока 2 появляется сигнал, равный первой производной от сигнала, пропорционального отклонению выходного сигнала системы и его .первой производной, который подается на вход блока ч выделения модуля. На выходе блока ч появляется сигнал, пропорциональный модулю производной отклонения выходного сиг. нала и второй производной выходного сигнала системы. К сигналу с выходаблока 4 добавляется с помощью блокапостояйное напряжение, определяекЖ требуемым значением амплитудыразрывного управления О, и суммарнцйсигнал поступает на второй входэлемента переменной структуры б. Свыхода элемента 6 сигнал, являющийсяфункцией знака сигнала на первомвходе и величиной амплитуды сигналана,втором входе, подается на входобъекта управления 8, вынуждая выходной сигнал объекта измениться в сторону уменьшения отклоненияот заданного значения и обеспечивая попадание системы на гиперпло- кость скольжения где 6 - точка разрыва многознач" ной вектор-Функциис(б) . После того, как система попадает на гиперплоскость скольжения б, она уже не может сойти с нее, так как при каж" дом отклонении изображающей точки от заданной гиперплоскости формируется сигнал воздействия на объект управления 8, который возвращает.язоб-. ражающую точку на заданную гиперплос" кость скольжения 6, Дальнейшее движение происходит в скользящем режиме. вдоль гиперплоскости, которая заранее выбрана таким образом, чтобы проходила через начало координат. Практически это означает, что в результате конечного числа переключений, объект управления 8 за счет введенного дополнительного воздейст; вия пропорционального первой произ водной отклонения выходного сигнала4 от заданного и второй производйои выходного сигнала на вход элемента пе- ременной структуры 6., приводится в состояние, когда отклонение выходного сигнала от заданного близко к нулю с любой заданной степенью точности,. Таким образом, предлагаемая систе" ма управления при введении новойсвязи с выхода первого сумматора 1Составитель А. ЛащевРедактор В. Иванова Техред О.Неце Корректор А, Повх Заказ 4392/43 Тираж 874 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 313035, Москва, Ж, Рауаская наб., д. 4/5филиал ППП "Патент", г, Ужгород, ул. Проектная., 4 5через первый блок дифференцирования2 с входом блока выделения модуля 4 обеспечивает сохранение высоких статических и динамических свойств при существенном сокращении блоков и элементов системы, что повышает 4024877 6надежность ее работы. Тем самым цельизобретения достигается.Технико"экономический эффект отвнедрения изобретения обусловленповышением надежности работы систе"мы автоматическогоуправления 5-6 раз.
СмотретьЗаявка
3371512, 24.12.1981
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ПАХОМОВ ЮРИЙ АНАТОЛЬЕВИЧ, ПАШКОВ НИКОЛАЙ НИКОЛАЕВИЧ, ЮНГЕР ИГОРЬ БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки:
Опубликовано: 23.06.1983
Код ссылки
<a href="https://patents.su/4-1024877-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Адресный блок системы телеконтроля

Номер патента: 608188
Опубликовано: 25.05.1978
Авторы: Андреев, Белима, Гордеева, Юрков
МПК: G08C 19/28
Метки: адресный, блок, системы, телеконтроля
...5 з н 5, ИЛИ предназначеныдля другого соотношения выдачи адресов изпервого и второго формирователей,Для примера на чертеже показано, что четыре. провода припаяно по входу элемента 5 ЗИЛИ и четыре - ко входу элемента 5 ИЛИ.Переключатели 6 6 г служит для выбора тогоили иного соотношения очередности выдачиадресов,Выходные контакты переключателей 61 и 6,соединены с первыми входами элементов 7, и7 г И, а также с.первыми управляющими входами элементов 101 - 1 ОИ - ИЛИ. Элементы7, и 7, И служат для подачи на соответствующий формирователь кода адреса 8или Згсигнала смены адреса, поступающего на второй вход элементов 7и г И с выхода элемента9 задержки.Элемент 9 задержки служит для задержкисигнала смены адреса на время переходныхпроцессов в...
Устройство для переключения резервируемых блоков системы телеуправления

Номер патента: 1032601
Опубликовано: 30.07.1983
Авторы: Галантерник, Калинин, Корольков, Литвинов
МПК: H05K 10/00
Метки: блоков, переключения, резервируемых, системы, телеуправления
...блока 2, вход опроса которого соединен с выходом счетчика, 7 пери- . ода контроля и первым входом элемента И 3, второй вход которого соединен с выходом запоминающего блока 2, выход элемента И 3 соединен с открывающими входами первого и второго управляемых вентилей 11 и. 12 и с уп" равляющим входом счетчика 1.3 импугьсов, закрывающий вход второго управляемого;вентиля 12 соединен с выходом первого генератора 4 тактовых импульсов,и тактовым входом первого генератора 5 И-последовательности,ин;.зУформационный вход, второго- управляемого вентиля 12 соединен с выходом счетчика 13 импульсов и закрывающим входом первого управляемого вентиля 11, выхор втооого управляемого венВтиля 12 соединен с. запускающим вхо дом первого генератора, 4 тактовых...
Устройство для переключения резервных блоков системы

Номер патента: 605217
Опубликовано: 30.04.1978
Авторы: Гендельман, Геништа, Ионова, Рачков
МПК: G06F 11/00
Метки: блоков, переключения, резервных, системы
...11; 35, контрол цыс 36 и яцформдциоицыс 37 выхол. Гцсмь.Принцип работы усгройГкз состои 3 Гледующсм.1(сджЛЬ 1 ц Кс 1 ИЗЛ ТрсккрП ИО рССр К.")О с) ИИО 1. сисггсмы рдзоит цд ш Олокок 2, которы( ГО(.:иия 10 тс 51 2 сжду Гооой срсз и 1 КО:),стор 3, Обссцсчц 3,;0 цци ГОГ,:исикс лооого -го блока 2 с-1)-м блоком 2 лобого кдцдлд.сЪ правлсицс каждым коммутатором ) Осуц( - ствляст трсхразрядцый рсгцср -1 уцрдк.синя. Регистр 4 яклястся рспстром сдвига и Бы;,з- СТ Ис 1)ЫХОЛДХ) МИР с 1 БЛЯ 10 ЩИС 4 11 ГЦЗЛЫ 13 ИО- зиииоииоз КО;Г, ГО,ГРжс 11 пс 1 ОДИ сдИцУ. Регистры сосдцнсцы пос)слокдтельцо, П зц прохождеиии каждым црсдыдущим рс Сро) исходного Состояния осуществляется Гдкц и цослс,ующс) рсгистрс.,.)то Лоспггастся темчто сгнал сдвига постугаст ца...
Линейный блок системы телемеханики

Номер патента: 1179410
Опубликовано: 15.09.1985
Автор: Портнов
МПК: G08C 19/28
Метки: блок, линейный, системы, телемеханики
...блока системы телемеханики.На чертеже изображена структурная схе.ма предложенного устройства.Линейный блок содержит блок питания1, первый и второй элемент 2 и 3 (гальванической) развязки, первый 4 и второй5 формирователи импульсов, выполненныена транзисторах, элемент НЕ 6, ключ 7, ер.вый 8 и второй 9 согласующие элементы,выполненные на резисторах, переключательрежима 10.Линейный блок работает следующим образом,Источник напряжения, построенный, например, по схеме мультивибратора Роера, обеспечивает формирование изолированного выходного напряжения, т. е. гальванически не связанного с источником напряжения цепей передатчика и приемника. Полярность напряжения исто щика 1 определяется типомиспользуемых транзисторов. Элементы...
Самонастраивающаяся система управления
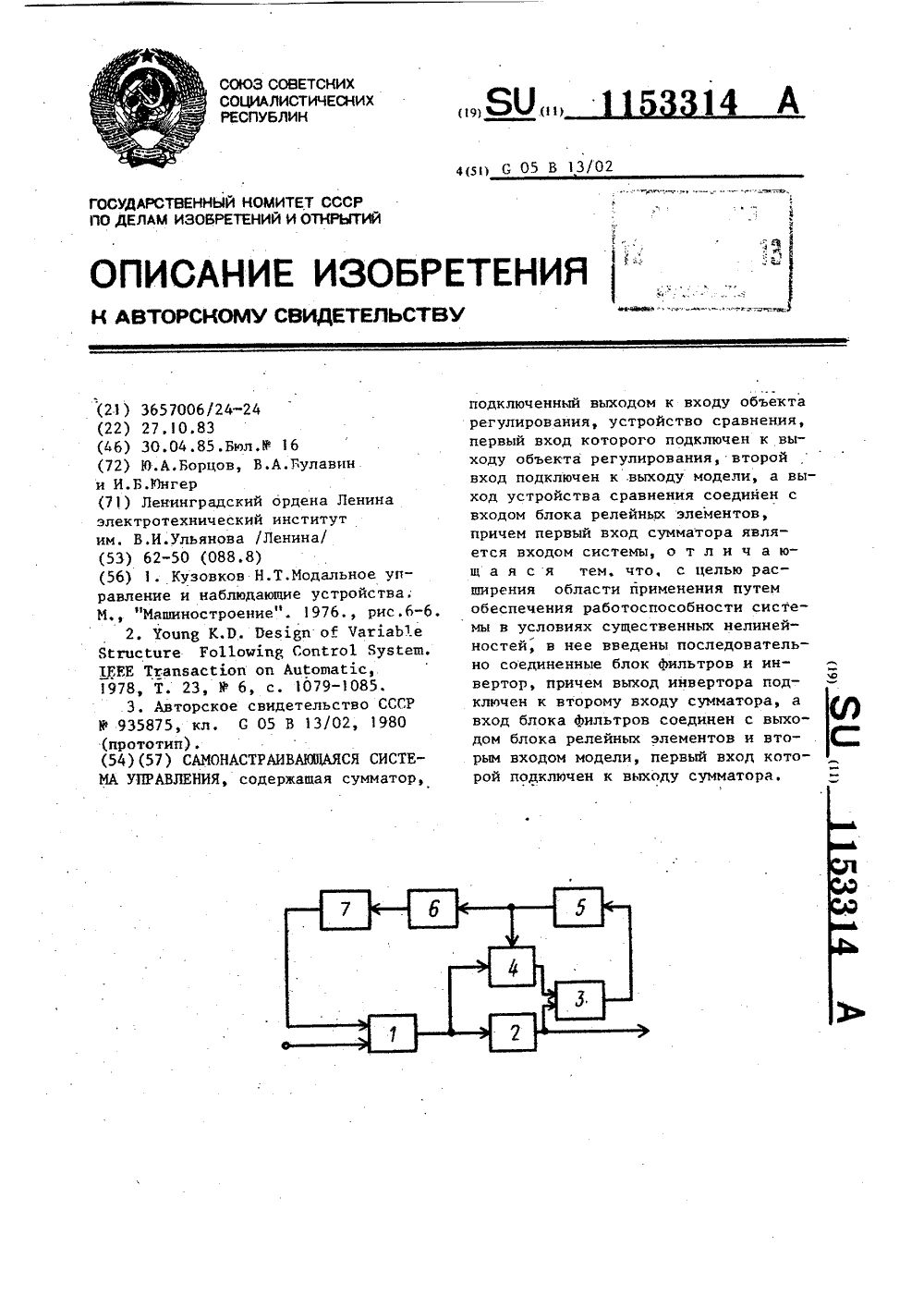
Номер патента: 1153314
Опубликовано: 30.04.1985
Авторы: Борцов, Булавин, Юнгер
МПК: G05B 13/02
Метки: самонастраивающаяся
...к второму входу которого подключен выход эталонной модели, а выход соединен с входом первого релейного элемента и с входом блока вычисления гиперплоскости скольжения, причем вход первого релейного элемента подключен на первый вход первого умножителя, выход блока вычисления гиперплоскости скольжения соединен с входом второго релейного элемента, выкод которого подключен к первому входу второго блока умножения, причем первый вход сумматора является входом системы, блок усиления, вход которого соединен с выходом первого блока умножения, .второй вход которого соединен с выходом блока сравнения, а выход блока усиления подключен на второй вход блока умножения, выход которого подключен на второй вход сумматора, первый вход которого...
Предыдущий патент: Устройство для управления
Следующий патент: Система стабилизации температуры резания
Случайный патент: Моющая композиция для очистки металлической поверхности