G05B 13/00 — Самонастраивающиеся системы управления, т.е. системы, автоматически выбирающие оптимальный режим работы для достижения заданного критерия
Нелинейный адаптивный регулятор

Номер патента: 1303994
Опубликовано: 15.04.1987
Авторы: Меняйленко, Ульшин
МПК: G05B 13/00
Метки: адаптивный, нелинейный, регулятор
...выходной сигнал с линейного звена 5 суммируется с сигналом рассогласования Е на сумматоре 3. 50 94 4элемента 2 сравнения и второго нели-нейного звена 6.На сумматоре 4 образуется суммарный сигнал, который через блоки выделения минимального 10 и максимального 11 значений подается на вход объекта 14 управления.Следовательно, в регуляторе реализуется нелинейный ПИ-закон управления. Характеристики нелинейных законов определяются типом нелинейного звена, который выбирается исходя из динамических свойств объекта регулирования. При малых значениях сигнала рассогласования величины на выходах нелинейных звеньев 5 и 6 малы (или равны нулю) по сравнению с величиной рассогласования на выходе звена 2 сравнения и не оказывают влияния на работу...
Система динамической синхронизации и корректировки рангов объектов в асу

Номер патента: 1305630
Опубликовано: 23.04.1987
Авторы: Бельских, Грабовский, Пышненко, Романов
МПК: G05B 13/00, G06F 11/26, G06F 9/40 ...
Метки: асу, динамической, корректировки, объектов, рангов, синхронизации
...тактовых импульсов системычастотой смены5поступает через элемент И 69 на инапример, кода но- крементный вход счетчика 58 импульего параметров сов, который выполняет две функции:на инкрементный формирует эталонную информацию для пульсов, увеличи- сравнения величин параметров всех раднего каждый Раз Ю ботоспособных ОУ и является управлячика 41 двоичный ющим элементом при опросе и грисвоешифратор 43, кото- нии порядкового номера регистрам 64подключает к ин- по первому параметру. Выходы счетчиу сначала сдвиго- е ка 58 параллельно подключены к одним информацжнный 15 входам элементов И бб, 78 и 115 пает код номера групп устройств 29.3 и 29.4, на друрующий вход гие входы которых поданы единичныеэлементы И соот- потенциалы от соответствующих...
Бинарная система управления нелинейными объектами

Номер патента: 1305631
Опубликовано: 23.04.1987
Авторы: Емельянов, Коровин, Сизиков, Цветкова
МПК: G05B 13/00
Метки: бинарная, нелинейными, объектами
...релейным элементом 17 и подается на входтретьего умножителя 18, на второйвход которого подается сигнал с выЯ хода второго нелинейного функционального блока 10, пропущенный через третий усилитель 13. С выхода третьегоумножителя 18 сигнал подается на входинтегратора 19. Сигнал, полученный15 на выходе интегратора 19, подаетсяна вторые входы первого 12 и второго15 умножителей,В рассматриваемой системе контуркоординатной обратной связи образован блоком 2 сравнения, дифференциаторами 44 4 первыми модульными элементами 71,7 7, первымнелинейным функциональным блоком 9,вторым сумматором 8, вторым усилителем 11 и первым умножителем 12, аконтур координатно-параметрическойобратной связи - первыми, усилителями555, первым сумматором...
Система автоматической оптимизации

Номер патента: 1310773
Опубликовано: 15.05.1987
Авторы: Киселев, Мышляев, Рыков, Строков, Фомин
МПК: G05B 13/00
Метки: автоматической, оптимизации
...сигнала 15 и пятый блок 34 сравнения, интегратор 35, первый ключ 36, последовательно соединенные мультивибратор 37, первый 38, второй 39, третий 40, четвертый 41 и пятый 42 блоки задержки, 2 О .шестой блок 43 задержки, третий коммутирующий блок 44, состоящий из третьих блоков ключей в количестве (и+1) с 44-1 по 44-(и+1), второй запоминающий блок 45, состоящий из вторых блоков элементов памяти в количестве (и+1) с 45-1 по 45-(и+1).Анализатор 24 выходов объекта оптимизации (фиг. 4) содержит первый блок 46 определения максимума, блок 30 47 определения минимума, блок 48 шестых блоков сравнения в количестве (и+1) с 48-1 по 48-(и+1), блок 49 вторых ключей в количестве (и+1) с 49-1 по 49-(и+1), блок 50 седьмых блоков сравнения в...
Система с переменной структурой

Номер патента: 1322230
Опубликовано: 07.07.1987
Авторы: Белорусец, Гичан, Крищюкайтис
МПК: G05B 13/00
Метки: переменной, структурой
...устройства 8 с выходом первого сумматора 15, а с помощью первого релейного. элемента 11 на интеграторе регулятора 4 устанавливаются нулевые начальные условйя интегрирования, При этом на входы первого сумматора 15 поступают сигнал рассогласования Е (1) = А-у(г.)2с третьего сумматора 13 и сигнал от задатчика 1 входного сигнала,прошедший через усилитель 12 с регулируемым коэффициентом усиления 1 с.В устройстве момент переключейиярегулируется с помощью коэффициента деления 1, а момент переключения с определяется временем задержгки. Введение первого сумматора 15 и усилителя 12 с коэффициентомЦюусиления к = ф позволяет в моАментсформировать требуемый сиггнал Ц . Параметры регулятора 4,на интеграторе которого сигнал с выхода элемента 7...
Система автоматической оптимизации

Номер патента: 1325405
Опубликовано: 23.07.1987
Авторы: Анфиногентов, Любашевский, Тартаковский, Чони
МПК: G05B 13/00
Метки: автоматической, оптимизации
...Я модели, заданной, например, для случая линейного объекта, имеющего Н входов и М выходов, в видеиЕЯ.Хо = УпЬ:1 В этом случае коэффициенты Я модели определяются из М систем линейных алгебраических уравненийиЯ Х , = У 1 с 1,И, ш = 1 М,)св которой Х - элемент матрицы сигналов входных воздействий, У 1, - эле мент матрицы сигналов выходных воздействий.Четвертый генератор 30 импульсов формирует импульс, запускающий блок 7 оптимизации и следующий за импульсом, формируемым третьим генератором 29 импульсов, с задержкой, равной времени формирования коэффициентов Я модели в блоке 6 идентификации. Блок 7 оптимизации, используя коэффициенты Я модели и сигналы с датчиков 3 выходных переменных, формирует оптимальные управляющие сигналы,...
Регулятор для оптимизации управления
Номер патента: 1339492
Опубликовано: 23.09.1987
Автор: Хмельник
МПК: G05B 13/00
Метки: оптимизации, регулятор
...напряжению П, Следовательно,вентили 10-ш переменного тока в данной электрической цепи ведут себяотносительно действующих (положительных или отрицательных) значений напряжения п и тока 1,п так же, как диоды в цепи постоянного тока,На управляющие входы модуляторов5 и б подаются постоянные напряжения,пропорциональные регулируемым величинам и уставкам. Эти напряжения модулируют синусоидальное напряжениена выходах указанных модуляторов, врезультате чего на этих выходах об-разуются синфазные синусоидальныенапряжения, у которых действующиезначения пропорциональны регулируемымвеличинам и уставкам соответственно.Эти синусоидальные напряжения подаются на первый и втоРой входы втоРо Ого решающего блока 2,По аналогии можно показать,...
Система регулирования

Номер патента: 1339493
Опубликовано: 23.09.1987
МПК: G05B 13/00
...скомпенсировано. Поскольку коорпицятя Х недос - тупна измерению, то, используя модель 15 преобразователя 7, вычислим оценку Х и, замецяя координату Х ее оценкой Х реализуем уравнение (4), Для скомпенсировяццого линейного объекта найдем управление10 П , = Х -п,Х,-п,Х-пХ-пХ, (б)где п., 1. = 1,4 - коэффициентыусиления посоответствующим входампервого сумматора 4.Система работает следующим обра эом.После подачи сигнала задания Хзот задатчика 3 в системе возникаетпереходный процесс, Поскольку нелинейные свойства силового преобразо вателя компенсируются с помощью цепи,состоящей из усилителей 1, 2 и 13,квадратора 14 и сумматора 12, чтосогласно (5) эквивалентно интегрирую-щему звену, то управляющее воэдейст вие П определяется...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1339494
Опубликовано: 23.09.1987
Авторы: Брусов, Крашенинников, Левичев, Сметанин, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...системы. Величинамодуля суммы сигналов У(С) и Е(С)в состоянии квазистатики объекта 7характеризует степень несоответствияуправляющего сигнала Х(г.) величине39494 3 5Цепи компенсатора совместно с замкнутым контуром управления (фиг. 3)включают в себя блоки 26, 27, 29 и30, Они являются основой компенсатора (фиг, 1 и 2), и в них выполняется 40 следующее: восстанавливается посредством блока 27 обратной модели входобъекта 7 из выходного сигнала объекта У(г.), определяется разность действительного Х(г) и восстановленно го Х(т) входов объекта посредствомсумматора 29. Полученный сигнал разности пропускается через блок 30 коррекции и суммируется с выходом регулятора с целью компенсации эквивалентного возмущения, приведенного к...
Система оптимизации режимов работы объекта
Номер патента: 1345168
Опубликовано: 15.10.1987
Авторы: Анисимов, Белинский, Грицков, Калиногорский, Мельник, Фомин, Цымбал, Шерышев, Юдин
МПК: G05B 13/00
Метки: объекта, оптимизации, работы, режимов
...например, в виде Сигнал о значении коэффициентов а;поступает на первый вход модели 12.На ее второй вход с выхода первогоблока 6 памяти поступают сигналы оЛ 1345 значениях факторов Х . В модели 12 сиспользованием полученных в идентификаторе 11 коэффициентов а рассчитываются оценки истинного значения фунл . 5 кции отклика Ц , соответствующие значениям факторов Х,.После этого командный блок 9 отключается по второму входу и открывается по первому, а на втором его вы ходе появляется командный сигнал,Это состояние является исходным для осуществления собственно процесса оптимизацииПервый шаг поиска оптимального ре жима работы объекта 1 управления начинается в момент подачи командного сигнала с второго выхода командного блока 9 на первый...
Регулятор с переменной структурой

Номер патента: 1348770
Опубликовано: 30.10.1987
Авторы: Безручко, Бушуев, Григорьев, Литвинов
МПК: G05B 13/00
Метки: переменной, регулятор, структурой
...задать точность, обеспечиваемую регулятором, в вице скалярной величины д, равной значению квадратичной формы И в установившемся режиме,5 то можно найти область начальных условий на вектор г,х 1 в и+1-мерном пространстве, из которой ПИ-регулятор будет обеспечивать заданное качество процессов. Эта область задается в 10свице выраженияР =с, где с=хсоив.Когда величина И непрерывно вычисляемой в регуляторе квадратичной формы становится меньше с, то регуляторпереходит в режим ПИ-регулирования(соответствует области малых отклонений от заданных значений регулируемой величины), при Ис осуществляется 20П-закон регулирования,Сущность изобретения поясняетсяфиг. 1, 2 и 3, где обозначены первыйформирователь 1, второй формирователь 2, третий...
Система экстремального регулирования

Номер патента: 1352452
Опубликовано: 15.11.1987
МПК: G05B 13/00
Метки: экстремального
...экстремального значения следует меньшее экстремальноезначение, первый аналоговый компара-.тор 35 срабатывает и запускает одновибратор 51. Однако импульс с выходаодновибратора 51 не проходит на входразрешения записи ОЗУ, так как третий ключ 50 остается в разомкнутомсостоянии, поскольку значение кода на втором входе цифрового компаратора 48 меньше, чем на первом, Объем памяти ОЗУ 47 при этом минимален, поскольку в него записывается лишь одно значение, т.е. глобальный экстремум, апредыдущие стираются, 7 13524Пиковый детектор 45 как бы растягивает во времени экстремальное значение сигнала, в результате чего требования к быстродействию АЦП 46 многократно снижаются, что позволяет использовать АЦП, постронные по методу приближения, т,е. с...
Адаптивная система управления

Номер патента: 1361502
Опубликовано: 23.12.1987
Авторы: Меняйленко, Ульшин
МПК: G05B 13/00
Метки: адаптивная
...образом, в зависимости от соотношения величин квадратов разностного сигнала рассогласования между поступившим дискретным сигналом от датчика 2 возмущающего воздействия и выходными сигналами с дискретных элементов 31 и 38 задержки, разност - ный сигнал с выходов элементов 23 и 24 сравнения поступает на соответствующие входы дискретных элементов задержки, после усиления усилителями 29 и 36 и корректирует выходные величины дискретных элементов 31 и 38 задержки с задержкой на один шаг работы ключа 20, Величина коррекции задается величиной коэффициента усиления усилителей 29 и 36 и выбирается из условия требуемого интервала усреднения.Следовательно, на выходах элементов 31 и 38 образуются средние значения составляющих возмущающего...
Самонастраивающийся следящий электропривод

Номер патента: 1366992
Опубликовано: 15.01.1988
МПК: G05B 13/00
Метки: самонастраивающийся, следящий, электропривод
...оценку отношения С- обеспечивает идентификатор, представляющий собой настраиваемую модель упругой механической передачи с моментом инерции нагрузки. Иден - тификатор состоит из сумматора 13, блока 14 умножения, сумматора 15, интегратора 16, сумматора 17, интегратора 18, сумматора 19, блока 20 умножения и интегратора 21, На второй вход сумматора 13 подается сигнал управления, подаваемый одновременно на блок 8 регулирования скорости. На другой вход сумматора 13 подается сигнал скорости выходного вала электропривода. Так как блок 8 регулирования скорости настраивается на максимальное быстродействие, то сигнал скорости вала двигателя 9 в режиме слежения практически совпадает с сигналом управления. Сигнал на выходе сумматора 13...
Нелинейный адаптивный регулятор

Номер патента: 1374177
Опубликовано: 15.02.1988
Авторы: Бурмистров, Меняйленко, Ульшин
МПК: G05B 13/00
Метки: адаптивный, нелинейный, регулятор
...ожидания МЯ(й) ошибки регулирования,Выходной сигнал блока 11 подается.навход блока 12 выделения модуля указанного сигнала, т.е. на выходе блока 12 сигнал равенМЕ,Сигнал с выхода блока 12 сравнивается на втором звене 13 сравненияс сигналом задатчика 14 ошибки регулирования Я . На выходе второго звеФна 13 сравнения образуется сигнал,равный 1 М Е (Т) - Е 1.При этом возможны следующие трислучая:-я- МК(С) с я(2, М(Е Я" (8)3. МЯс- ф (9)Допустим, начиная с момента времени 1 = О имеет место первый случай 35(7).При этом на выходе второгб звена13 сравнения сигнал меньше или равен с, , а знак сигнала отрицательный или равный нулю. Следовательно, 40на входе порогового элемента 15 отрицательный или равный нулю сигнал,а на выходе этого элемента...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1386957
Опубликовано: 07.04.1988
Автор: Брусов
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...через ключ 22 и запоминается в блоке 23 памяти. При работесистемы все изменения величины х (С)в определенном соотношении, равномкоэффициенту передачи блока 7, отслеживаются величиной П(с). Такимобразом, корректирующий фильтр 7представляет собой пропорциональное звено с переменным коэффициентом передачи, который имеет. кусочно-постоянный характер,Блок 6 самонастройки работает следующим образом (фиг. 2),Блок 16 служит для определения момента самонастройки, В блоках 17-19проверяются условия квазистатики объекта управления, Операции, выполняемые в блоках 16 - 19, описываются соответственно формулами (3)-(6),П,(с)1 (3)Ь у(с) (С,; (4)(6) Сигнал П;(г.) представляет собой реакцию замкнутого контура системы 5 на действие всех видов...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1388826
Опубликовано: 15.04.1988
Авторы: Брусов, Сметанин, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...25 умножения, в котором формируется выходной сигнал 11(й) разомкнутого контура. Таким образом, выходной сигналдатчика 8 умножается в блоке 10 нанекоторую величину (коэффициент передачи блока 10), которая между актами самонастройки корректирующегофильтра 10 является величиной пос138882 тоянной и хранится в блоке 24. При самонастройке блока 10 коэффициент передачи его изменяется скачкообразно,так как при наступлении состояния кназистатики новое отношение входных5 сигналов делителя 22, пропорционально текущему соотношению дозировок реагента и сырья, пропускается через ключ 23 и запоминается в первом бло О ке 24 памяти. При работе системы все изменения величины Х(Г) будут в определенном соотношении, равном коэффициенту передачи блока 1 О,...
Пневматический регулятор с переменной структурой

Номер патента: 1401438
Опубликовано: 07.06.1988
Авторы: Мамедов, Мусаев, Рахберли, Рустамов
МПК: G05B 13/00
Метки: переменной, пневматический, регулятор, структурой
...выход пропорционального блока Р через нормально размыкающий контакт сопла канала 12 и уси 45литель 13 мощности связан с выходнымканалом регулятора Р ,. Выход Рблока логики соединен непосредственнос управляющей камерой реле 14 переключения и через третий дроссель 17 с управляющей камерой клапана 12.Регулятор работает следующим образом.В соответствии с принципиальнойсхемой сигнал на выходе блока логики имеет единичное значение лищь в случае, когда совпадают знаки рассогласования Е = Р - Р и функции переклюо Цченияя = т с 1 ЕдсСоответственно в замкнутой системерегулирования на начальном участке переходного процесса Р = Р и Р=1, т.е. клапан 12 и нижнее сопло реле 14 переключения открыты, так как проводимость открытого сопла...
Система управления объектом с присоединенным упругодеформируемым элементом

Номер патента: 1403015
Опубликовано: 15.06.1988
Авторы: Веревкин, Дубин, Мануйлов
МПК: G05B 13/00
Метки: объектом, присоединенным, упругодеформируемым, элементом
...нулевой сигнал). 20 На входе блоков 4 вычитания, датчик 6 угловой скорости объекта и дат чика 7 упругой деформации объекта присутствуют сигналы, пропорциональные соответственно угловому рассог 25 ласованию, угловой скорости объекта и координате отклонения упругого .элемента, На выходе дифференцирующего элемента 8 появляется сигнал, пропорциональный скорости упругого 30 элемента, На выходе второго блока 20 вычисления амплитуды Фазовой траектории, на входы которого подаются сигналы, пропорциональные /с 1/-Ч/Я появляется сигнал пропорциональный величине В/=Ч /с 1/-Ч(У")+(с 1) Й), а на выходе первого блока 19 вычисления амплитуды, фазовой траектории появляется сигнал пропорциональным К = с+(с 1/а), При помощи первого 40 формирователя...
Регулятор с размытой логикой

Номер патента: 1405026
Опубликовано: 23.06.1988
Авторы: Алиев, Бабаев, Джафаров
МПК: G05B 13/00
Метки: логикой, размытой, регулятор
...выходной сигнал объекта х(С) поступает иа вход первого усилителя 1, где умножается напостоянный масштабирующий коэффициент Кх. Выходной сигнал усилителя 1 х(й)К х(С) поступает одновременно(параллельно) на первые входы компа" раторов 8.1 К.7 К (непрерывно-дискретные преобразователи), на вторые входы которых содаются сигналы с различными уровнями х,(ь 1,7) (соответствующие диапазонам лингвистических термов) иэ соответствующих задатчийов 5.1-5.7 блока 5.В компараторах 8.1 К,7 К осуществляется сравнение Ра =8)(х,к(г.)- -х) и на выходах получаются дискретные двухуровневые сигналы: "0" .(низкий уровень) или "1" (высокий уровень). Выходные сигналы компараторов 8-к( =1,7) подаются на пер" вые входы соответствующих логических блоков...
Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости

Номер патента: 1432457
Опубликовано: 23.10.1988
МПК: G05B 13/00
Метки: жесткости, идентификации, колебаний, объекту, переменной, присоединенного, упругого, элемента
...объекта наблюдения, полученное в блоке6, влечет за собой необходимость определения начальных условий (18) дляинтегрирования уравнения (15),Определение начальных условий (181происходит в блоке 9 расчета параметров идентиФикатора,При помощи источника 51 пастояннога напряжения, задающего Л,г, умножителей 53-56, сумматоров 63-65, делителей 71 и 69 и сигналов а, Ь(Г),с(Г), 6, поступающих соответственно на первые-четвертые входы блока 9,на четвертом выходе блока Формируетсясигнал =(Л Ь)/(Л - ЛЙ- ), а натретьем выходе блока 1 р(а+с 1 г,)/Лг .При памапд источника,52 постоянного напряжения, умножителей 57,.58, 60 и59, сумматоров 62, 61, бб, 6 7 и 68,делителя 70 .на втором выходе блокаформир ется 114 ( Л а Л 1 гд га) /( с-Лг +Лй), а на первом...
Устройство с размытой логической самоорганизацией для автоматического управления объектом, например ректификационной колонной

Номер патента: 1434402
Опубликовано: 30.10.1988
Авторы: Алиев, Бабаев, Джафаров
МПК: G05B 13/00
Метки: колонной, логической, например, объектом, размытой, ректификационной, самоорганизацией
...13,=М или Ю =С.лНа первом и втором выходах квантатора 29 формируются лингвистическиетермы чувствительности первого управ 8ляющего канала у (Т); У,",=НО, или У,==МН, а на первом го третий выходахквантатора 30 - термы чувствительности второго управляющего канала у (г.): 571,=ВН или 1 =НО, или У =МН. Аналогич, лно, на выходах квантатора 31 формируются термы Б: Б =УС или Б =НУС,С второго выхода квантатора 28 сигнал 10 Р ъ=13 поступает на входы первого35 элемента ИЛИ и второго 49 элемента И, на второй вход которого постулпает сигнал Р, , =У, (1 или О) с первого выхода квантатора 29. Выходной 15 дискретный сигнал элемента 49 Р 4поступает на первые входы элементов42 и 43, на вторье входы которых послтупают сигналы с первого Р Б,и второго Р...
Система терминального управления упругим объектом

Номер патента: 1434403
Опубликовано: 30.10.1988
МПК: G05B 13/00
Метки: объектом, терминального, упругим
...получим уравнение линии переключения3,(х,х Ч)=х,+-хх./ЧщО. (4)Если время, за которое должен быть 15 осуществлен процесс сброса величины управляющего ускорения до нуля, определено и равно Тс, то координаты точки, лежащей на линии переключения1 =О, в которую должно быть предвари тельно переведена изображающая точка, определяются в виде;1У - 6 н Тс вБп (хо ) в05 Чн Тс вдВп (х о) (5)Получим аналитические выражения, описывающие линии переключения участков У 2 - В 3, Ф 3 - В 5, Р 5 - У 6, при их непрерывном следовании друг за другом (пропущен участок Ф 4, т.е, 30 отсутствует ограничение на скорость движения объекта). Для этого запишем решение задачи Коши уравнений движения твердого тела на рассматриваемых участках:35иУ, =У+в.Тн+05 ЧнТнв.Кп...
Цифровая система управления

Номер патента: 1439531
Опубликовано: 23.11.1988
МПК: G05B 13/00
Метки: цифровая
...блоке 7 масштабирования (фиг,4)переменная 11 по сигналу У, поступает из регистра 34 сдвига на выход.Заносится эта переменная с входа врегистр 34 по сигналу У. Принципумножения при занесении на постояннуювеличину Й состоит в следующем. Предполагается, что д = 2 , Б = 0,1,2,.Длительность сигнала У 9 формируется в устройстве управления на Б тактов больше, чем длительность У(дг.ительность У 1 1.-тактов). Благодаря этому при занесении в регистр П,сдвигается в сторону младших разрядов и к концу сдвига в этом регистреформируется величина 11, Л.В регистры сдвига 8 и 18 (фиг,5)двоичный код заносится по сигналу У1а выдается по сигналу У. Длительности сигналов У и У одинаковы.На вход блоков выделения знака.(фиг,б) поступает переменная ЧБ,-с/210...
Адаптивный цифроаналоговый регулятор

Номер патента: 1453364
Опубликовано: 23.01.1989
Авторы: Добрыдень, Трохин, Чернин
МПК: G05B 13/00
Метки: адаптивный, регулятор, цифроаналоговый
...через блоки 2 и 3 и элементы 6 и7 соответственно синхронно с импульсаии с второго выхода тактового генератора,задержанными на ;/3 относительно импульсов с первого выхода, Такии образом, в предыдущих рассуждениях достаточно вместопринять вепичину 1/(Е+Го)Пусть теперь Г к = О, но Г,Г, В этом случае при Г,С зиздывание импульсов на выходе Формирователя 11 будет нарастать (Фцг. 5), пропор - ционально будет расти цо време;и и выходное напряжение дел 1 л 1 улятрд 13, т,е. управляющий сцгцдл Г булет пропорционален ццтегрл у гцгцдл рас-. согл.сования - разц г"т ц Г-Г, .Э 145336Если Г ) Гр(фиг. 6), то аналогично сигнал на выходе демодулятора будеть убывать, поскольку теперь интегрируемый сигнал рассогласования отрицателен.5Так вырабатывается...
Самонастраивающаяся система управления
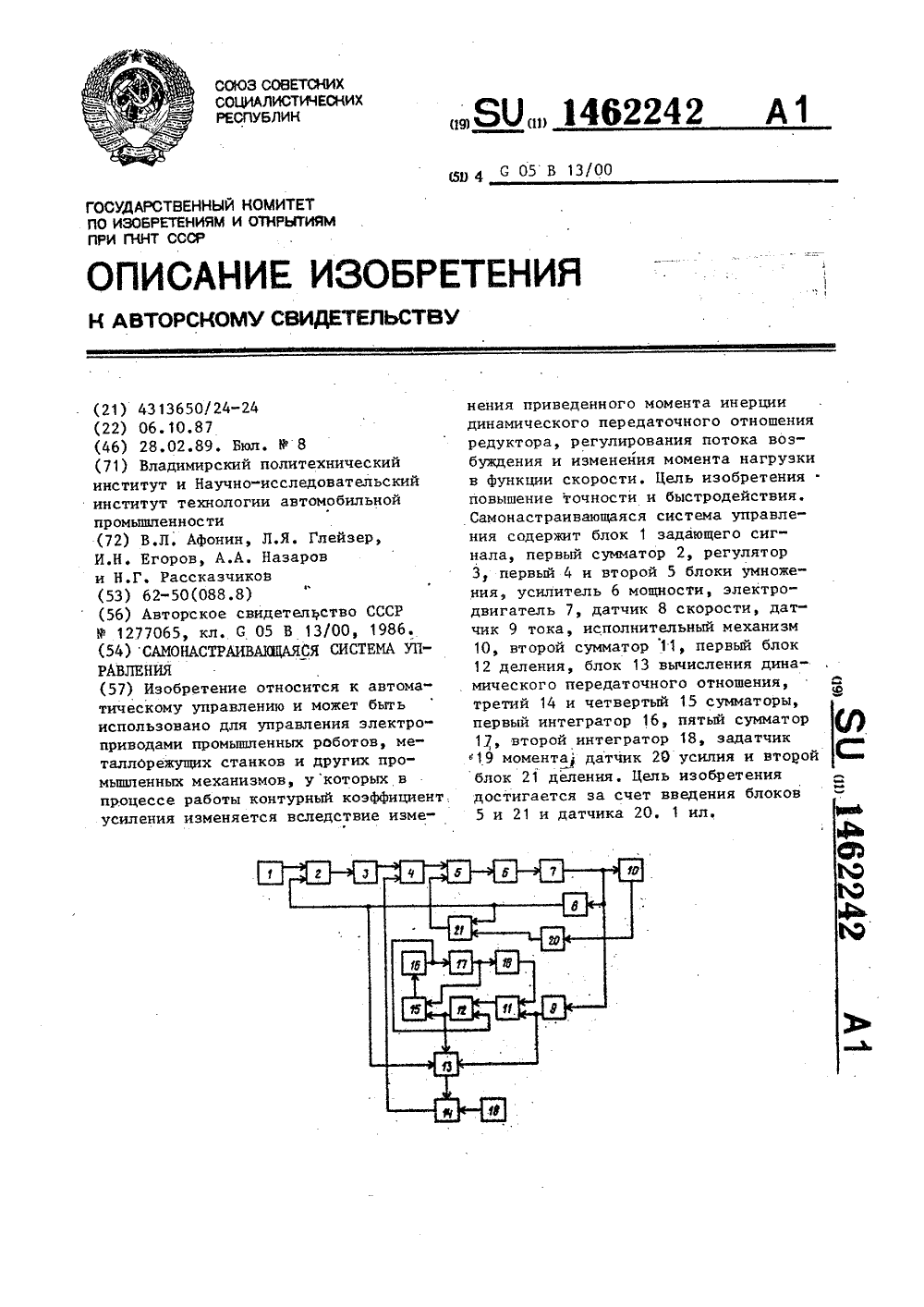
Номер патента: 1462242
Опубликовано: 28.02.1989
Авторы: Афонин, Глейзер, Егоров, Назаров, Рассказчиков
МПК: G05B 13/00
Метки: самонастраивающаяся
...15. Так будет происходить до тех пор, пока сигнал на выходе сумматора 15 не станет равным ускорению выходного вала редуктора, а сигнал на выходе блока.деления 12 - моменту инерции нагрузки, Далее этот сигнал через блок 13 поступает на вход третьего сумматора 14, на второй вход которого подается сигнал пропорциональный моменту инерции двигателя с выхода задатчика 19. На выходе сумматора 14 Формируется сигнал, пропорциональный суммарному моменту инерции, приведенному к валу двигателя. Этот сигнал в блоке 4 умножается на сигнал, поступающий с выхода регулятора 3, В .результате получаем эффект увеличения общего коэффициента передачи регулятора 3 и блока 4 на. величину, пропорциональную уменьшению коэффициента передачи двигателя, и...
Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов

Номер патента: 1467534
Опубликовано: 23.03.1989
Автор: Мануйлов
МПК: G05B 13/00
Метки: динамических, конечным, линейных, объектов, последовательного, состоянием, стационарных, финитного
...11, вводится и фиксируетсяв блоке 14 запоминающих элементов,содержащем п запоминающих элементови имеющем столько же выходов,Таймер 16 предназначен для формирования значений текущего времениуправления. Блоки 13 и 22 в соответствии с выражением (7) формируютна своих п выходах текущие значенияпереходной матрицы системы (1). Блок5 вычисления коэффициентов передачирешает в ускоренном времени дифференциальное уравнение (8) и формирует насвоих п выходах текущее значениематрицы К (Т, ) . Блоки 15 и 18-21служат для реализации ц(т) в соответствии с выражением (5). В частности, на выходе-блока 18 формируетсяех(Т) -,е х1а на выходеблока 20 е "К "(Т, ВГ е" х(Т)-А- е х(С) .Вторые матричные входы блоков 20и 21 матричного умножения предназна=.,чен для...
Система автоматического регулирования

Номер патента: 1483429
Опубликовано: 30.05.1989
Авторы: Авдеев, Кириллов, Киселев, Коровин, Лесин, Литвинцев, Мышляев, Смольников, Тропин
МПК: G05B 13/00
...У только в очередной дискретный момент времени т т.е. в момент поступления на управляющий вход первого запоминающего блока 8 очередного импульса Ес выхода первого компаратора 9. Именно в этот момент происхолит ступенчатое изменение сигнала я, ошибки регулирования, рассчитывается величина р регулирующего воздействия, обеспечивающего вывод выхода У объекта на новый заданный . уровень, скачком увеличивается сигнал Ь 11 различия между р и 1), запоминается в виде Ь 11, на время Ь 1 и пере. считывается в длительность Ь Туправляющего импульса р с учетом величин 1 хи А, подаваемого на вход исполнительного ор. гана.40 45 50 55 Под воздействием импульса и исполнительный орган в течение интервала времени ЬТ со скоростью 1, изменяет величину...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1509828
Опубликовано: 23.09.1989
Авторы: Брусов, Крашенинников, Левичев, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...33 памяти будет записано новое значение коэффициента передачи корректирующего фильтра 14. При этом выходной управляющий сигнал 0(С)формируемый замкнутым контуром, будет уменьшен, а выходной сигнал разомкнутого контура У(С) увеличен на величину И-составляющей выхода регулятора, имевшую место в составе выхода регулятора перед моментом самонастройки. Второй выход регулятора 4 (или 6) определяется выражением (11), т.е. представляет собой ГЩ-составляющую сигнала ц,(С), умноженную в блоке 9 на величину ХР(С), Сигнал У Р (С) вычитается в сумматоре 12 из сигнала Х(С). Этим исключается двойное суммирование ПД-составляющей выхода регулятора 4 (или 6) в сумматоре 10 и, следовательно, возмущение входа объекта,При дальнейшей работе системы величина...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1511734
Опубликовано: 30.09.1989
Авторы: Брусов, Левичев, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...текущему отношению дозировок реагента и сырья,пропускается через ключ 28 и запоминается в блоке 29 памяти. При работесистемы все изменения величины Х (С)будут в определенном соотношении, 25,равном коэффициенту передачи фильтра 7, отслеживаться величиной 0(1),Таким образом, корректирующий фильтр7 представляет собой пропорциональное звено с переменным коэффициентомпередачи, который имеет кусочно-постоянный характер,При использовании в качестве блока 2 регуляторов П, ПД, релейных идругих, не имеющих в законе формиро 35вания управления И-составляющей, еероль в системе будет играть выходнойсигнал блока 1 О интегрального среднего. Дпя этого сигнал ,(1) интегрируется на скользящем интервале, затем усиливается в К раз и через управляемый...